Изобретение относится к области способов управления работой вращающихся электрических машин. Оно основано на способе управления работой вращающейся электрической машины и устройстве для осуществления этого способа, которые соответствуют ограничительной части независимых пунктов формулы изобретения.
В настоящее время устройства для управления работой вращающихся электрических машин широко используются, и потребность в них неуклонно возрастает. Пригодное для этой цели устройство раскрывается, например, в EP 1521356 A2. В этом документе описывается вращающаяся электрическая машина, имеющая две группы обмоток статора. Кроме того, в каждом случае каждой группе обмоток статора придан один преобразователь, который подает на него питание. В каждом случае каждому преобразователю придано одно регулирующее устройство, которое управляет работой соответствующего преобразователя посредством управляющего сигнала. Кроме того, предусмотрены измерительные средства, которые измеряют ток в каждой группе обмоток статора, и измеряемые токи подаются на соответствующее регулирующее устройство, которое играет роль так называемого задатчика, т.е. подает измеряемые токи задающего регулирующего устройства в другое регулирующее устройство, так называемый повторитель. Измеряемые токи подаются через линию передачи данных. В ответ на получение измеряемых токов от задающего регулирующего устройства, регулирующее устройство-повторитель выдает соответствующий управляющий сигнал на связанный с ним преобразователь, т.е. управляющий сигнал регулирующего устройства-повторителя зависит от поступающего сигнала задающего регулирующего устройства, который служит в качестве опорного.
Одной из проблем, связанных со способом управления работой вращающейся электрической машины и соответствующим устройством для осуществления этого метода, описанными в EP 1521356 A2, является то, что одно регулирующее устройство, а именно регулирующее устройство-повторитель, зависит от другого регулирующего устройства, а именно задающего регулирующего устройства. Следовательно, реальная независимость и резервирование регулирующих устройств с их соответственными преобразователями и, таким образом, независимая регулировка электрических параметров соответствующих групп обмоток статора или независимое воздействие на эти параметры, в частности, токи в каждой группе обмоток статора, не обеспечиваются.
Следовательно, одна из целей настоящего изобретения - создать способ управления работой вращающейся электрической машины, позволяющий обеспечить резервированное и независимое регулирование электрических параметров отдельных групп обмоток статора вращающейся электрической машины. Кроме того, целью является создание устройства, которое можно реализовать очень простым и надежным образом, с помощью несложных схемных решений, и которое можно использовать для осуществления указанного способа очень простым образом. Эти цели достигаются благодаря признакам, указанным в пунктах 1 и 6 формулы изобретения, соответственно. Выгодные варианты осуществления изобретения раскрыты в зависимых пунктах формулы изобретения.
Вращающаяся электрическая машина имеет, по крайней мере, две группы обмоток статора, причем каждая группа обмоток статора содержит n фазных обмоток, где n≥3, и в каждом случае каждой группе обмоток статора придан связанный с ней преобразователь, который подает питание на эту группу обмоток статора. В способе управления работой машины, соответствующем изобретению, соответственная группа обмоток статора получает питание от приданного ей преобразователя. Согласно изобретению, производится измерение токов, по крайней мере, n-1 фазных обмоток каждой группы обмоток статора. Далее, каждому преобразователю в каждом случае придано одно регулирующее устройство, и каждый преобразователь управляется посредством управляющего сигнала приданного ему регулирующего устройства независимо от регулирующих устройств других преобразователей. Сигнал управления формируется в соответственном регулирующем устройстве из измеряемых токов каждой группы обмоток статора. Благодаря указанным признакам способа, соответствующего изобретению, можно по отдельности и независимо регулировать и оказывать воздействие на электрические параметры соответственных групп обмоток статора, в частности, токи каждой группы обмоток статора, что дает возможность резервированного регулирования токов или воздействия на них. В результате повышается коэффициент готовности и удобство технического обслуживания всей системы.
Устройство для осуществления способа управления работой вращающейся электрической машины включает в каждом случае один преобразователь, приданный каждой группе обмоток статора для подачи питания. В соответствии с изобретением, предусмотрены измерительные средства для измерения токов, по крайней мере, n-1 фазных обмоток каждой группы обмоток статора. Далее, в каждом случае каждому преобразователю придано одно регулирующее устройство для управления соответственного преобразователя посредством приводного сигнала независимо от регулирующих устройств других преобразователей. В каждое регулирующее устройство подаются измеряемые токи каждой группы обмоток статора с целью формирования управляющего сигнала.
Устройство, соответствующее изобретению, можно реализовать очень простым и надежным образом, с помощью несложных схемных решений, и его можно использовать для осуществления указанного способа очень простым образом. Благодаря соответственному регулирующему устройству, которое управляет связанным с ним преобразователем независимо от регулирующих устройств других преобразователей, устройство, соответствующее изобретению, имеет избыточную, резервированную конструкцию, что позволяет достичь высокой степени готовности и удобства обслуживания всей системы.
Эти и другие цели, преимущества и признаки настоящего изобретения раскрываются в приводимом ниже подробном описании предпочтительных вариантов осуществления изобретения со ссылками на прилагаемые чертежи.
Краткое описание чертежей
На чертежах:
фиг.1 - первый вариант соответствующего изобретению устройства для осуществления соответствующего изобретению способа управления работой вращающейся электрической машины, а именно вращающейся электрической машины в виде синхронной машины,
фиг.2 - вариант регулирующего устройства для устройства, показанного на фиг.1,
фиг.3 - второй вариант соответствующего изобретению устройства для осуществления соответствующего изобретению способа управления работой вращающейся электрической машины, а именно вращающейся электрической машины в виде асинхронной машины, и
фиг.4 - вариант регулирующего устройства для устройства, показанного на фиг.3.
Позиции, показанные на чертежах, и их значения представлены в списке условных обозначений. Одинаковые части обозначены на чертежах одними и теми же позициями. Описанные примеры осуществления изобретения носят лишь иллюстративный характер и не имеют ограничивающего действия.
Подходы к осуществлению изобретения
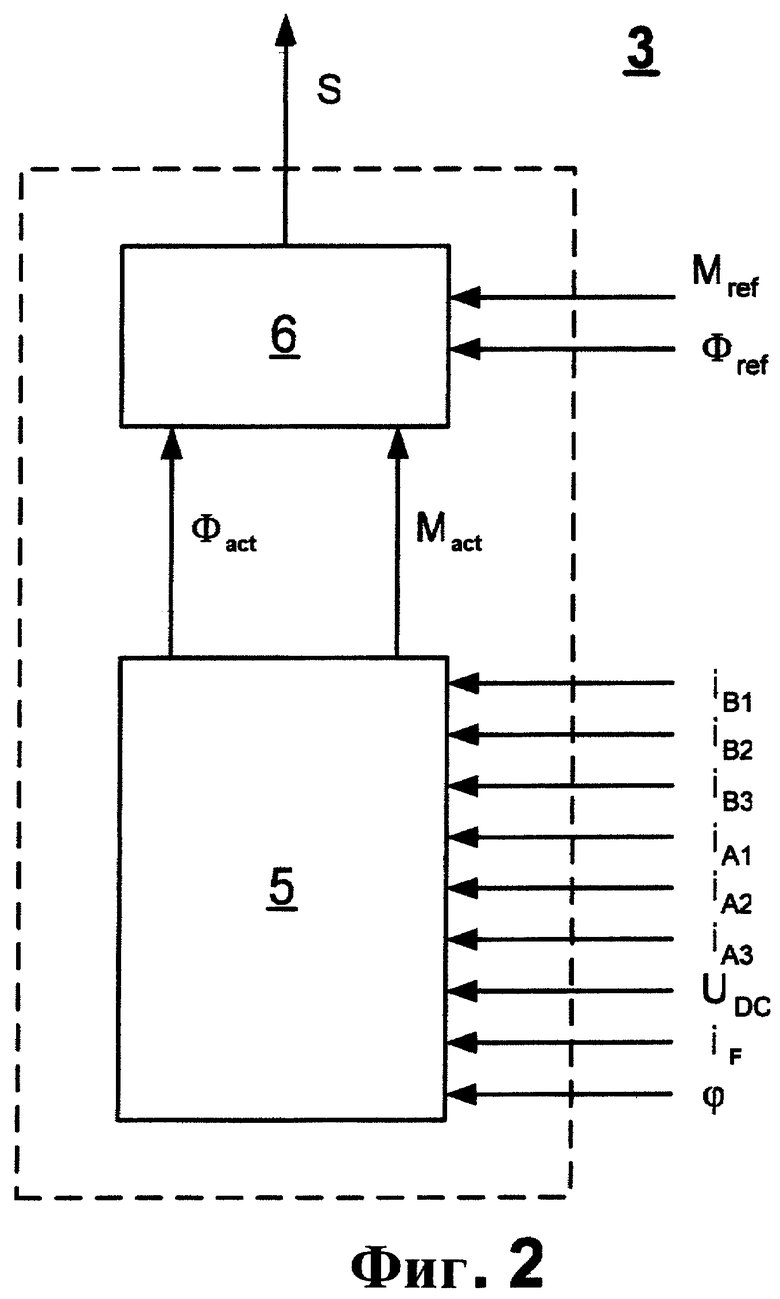
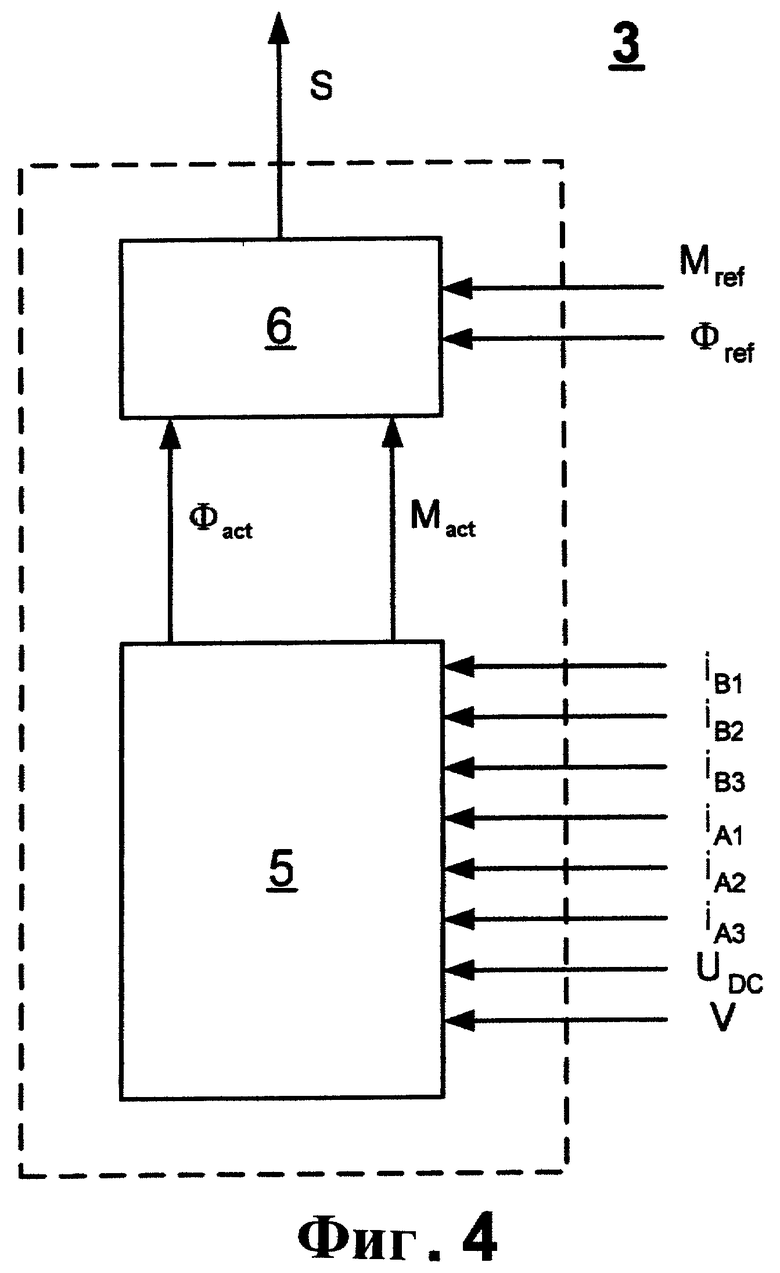
На фиг.1 показан первый вариант соответствующего изобретению устройства для осуществления соответствующего изобретению способа управления работой вращающейся электрической машины 1, конкретнее, вращающейся электрической машины 1 в виде синхронной машины. Далее, на фиг.3 показан второй вариант соответствующего изобретению устройства для осуществления соответствующего изобретению способа управления работой вращающейся электрической машины 1, конкретнее, вращающейся электрической машины 1 в виде асинхронной машины.
Машина 1 имеет, по крайней мере, две группы обмоток статора A, B, т.е. наличие более чем двух групп обмоток статора A, B также возможно. Каждая группа обмоток статора A, B обычно содержит n фазных обмоток, где n≥3. В вариантах, представленных на фиг.1 и 3, показаны две группы обмоток статора A, B, каждая из которых имеет n=3 фазных обмоток. Как показано на фиг.1 и фиг.3, в каждом случае каждой группе обмоток статора A, B придан один преобразователь 2. Соответствующая группа обмоток статора A, B получает питание от приданного ей преобразователя 2.
В способе, соответствующем изобретению, измеряются токи iA1, iA2, iA3; iB1, iB2, iB3 по крайней мере n-1 фазных обмоток из каждой группы обмоток статора A, B. На фиг.1 и фиг.3 измеряются токи iA1, iA2, iA3; iB1, iB2, iB3 n=3 фазных обмоток каждой группы обмоток статора A, B, но, в принципе достаточно, измерять только токи iA1, iA2, iA3; iB1, iB2 iB3 в n-1 обмоток статора, что выгодно упрощает способ.
Кроме того, как показано на фиг.1 и фиг.3, для каждого преобразователя 2 предусмотрено одно связанное с ним регулирующее устройство, и каждый преобразователь 2 управляется посредством управляющего сигнала S соответственно связанного с ним регулирующего устройства независимо от регулирующих устройств 3 других преобразователей 2. Далее, управляющий сигнал S формируется в соответственном регулирующем устройстве 3 на основе измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статоров A, B. Как показано на фиг.1 и фиг.3, в каждое регулирующее устройство 3 поступает n=3 измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B для формирования управляющего сигнала S. В принципе, однако, каждое регулирующее устройство 3 получает, по крайней мере, n-1 измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B для формирования управляющего сигнала S.
Благодаря указанным признакам способа, соответствующего изобретению, можно по отдельности и независимо регулировать и оказывать воздействие на электрические параметры соответственных групп обмоток статора A, B, в частности, токи iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B и/или фазные выходные напряжения преобразователя 2. Это дает возможность резервного регулирования токов iA1, iA2, iA3; iB1, iB2, iB3 или фазных выходных напряжений преобразователя 2 или воздействия на них. В результате повышается коэффициент готовности и удобство технического обслуживания всей системы. Кроме того, способ и устройство, соответствующие изобретению, делают возможной так называемую четырехквадрантную работу соответственного преобразователя 2.
Далее, устройство, соответствующее изобретению, можно реализовать очень простым и надежным образом, с помощью несложных схемных решений, и его можно использовать для осуществления указанного способа очень простым образом. Благодаря соответственному регулирующему устройству 3, которое управляет связанным с ним преобразователем 2 независимо от регулирующих устройств 3 других преобразователей 2, устройство, соответствующее изобретению, имеет избыточную конструкцию, что позволяет достичь высокой степени готовности и удобства обслуживания всей системы. Кроме того, способ и устройство, соответствующие изобретению, делают возможной так называемую четырехквадрантную работу соответственного преобразователя 2.
Как показано на фиг.1 и фиг.2, к соответственному преобразователю 2 подключен емкостный накопитель энергии 8. В результате этого каждый соответственный преобразователь 2 может получать питание, например, от отдельной системы напряжения постоянного тока через соответствующий емкостный накопитель энергии 8, что увеличивает степень резервирования. В другом варианте каждый преобразователь 2 может в каждом случае получать питание от отдельной системы переменного тока через емкостный накопитель энергии 8 и выпрямитель, подключенный к емкостному накопителю 8, что аналогичным образом увеличивает степень резервирования. Кроме того, в случае, например, перерыва в энергоснабжении преобразователь 2 может питать соединенный с ним емкостный накопитель энергии 8 электроэнергией от вращающейся электрической машины 1 и, таким образом, по крайней мере, частично компенсировать нарушение энергоснабжения от системы питания, соединенной с емкостным накопителем энергии 8, в то время как второй преобразователь 2, который запитан от отдельной системы питания через соединенный с ним емкостный накопитель энергии 8, питает вращающуюся электрическую машину 1 и, таким образом, продолжает приводить ее в действие. Возможно также, разумеется, что отдельные емкостные накопители энергии соединены друг с другом, или что емкостный накопитель энергии 8 выполнен в виде одного общего емкостного накопителя энергии 8, к которому подключаются преобразователи 2. В целом описанная выше избыточная конструкция, соответствующая изобретению, а также метод, соответствующий изобретению, позволяют, например, отключать преобразователь 2 для целей технического обслуживания и снова подключать его после технического обслуживания, в то время как другой преобразователь 2 продолжает работать и питать вращающуюся электрическую машину 1.
В случае когда вращающаяся электрическая машина 1 представляет собой синхронную машину, текущий вращающий момент Mact и текущее значение магнитного потока статора Φact формируются в соответствующем регулирующем устройстве 3 из измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B, из напряжения постоянного тока UDC емкостного накопителя энергии 8, соединенного с соответственным преобразователем 2, и из положения ротора φ.
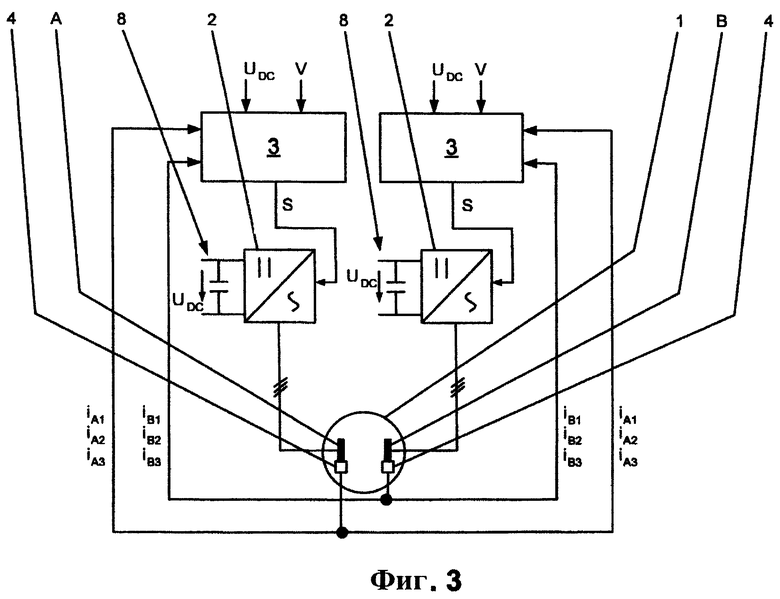
Такая синхронная машина, которая не требует обмотки возбуждения, а также не требует тока возбуждения iF, обычно представляет собой машину с постоянным магнитом. Если, с другой стороны, в синхронной машине имеется обмотка возбуждения, то для метода, соответствующего изобретению, это означает, что текущий вращающий момент Mact и текущее значение магнитного потока статора Φact формируются, помимо других электрических параметров, из тока возбуждения iF обмотки возбуждения синхронной машины. В этой связи на фиг.2 показан вариант регулирующего устройства 3 устройства, представленного на фиг.1, для синхронной машины, имеющей обмотку возбуждения.
На этой фигуре (фиг.2) каждое регулирующее устройство 3 имеет вычислительный блок 5 для формирования текущего значения вращающего момента Mact и текущего значения магнитного потока статора Φact из измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 каждой из группы обмоток статора A, B, из напряжения постоянного тока UDC емкостного накопителя энергии 8, из положения ротора φ и из тока возбуждения iF. Как показано на фиг.2, указанные параметры поступают в вычислительный блок 5. Следует упомянуть о том, что положение ротора φ может быть измеряемым или вычисляемым параметром. Ток возбуждения iF и напряжение постоянного тока UDC емкостного накопителя энергии 8 являются в любом случае измеряемыми параметрами. Как уже упоминалось, в принципе, можно измерять только n-1 токов iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B. Соответственные неизмеряемые токи iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B могут вычисляться из измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 в вычислительном блоке 5. Таким образом, для каждой группы обмоток статора А, В можно обойтись без одного трансформатора тока, который требуется для измерения токов, но который дорого стоит, занимает много места и в котором могут возникать неисправности.
Согласно данному способу сигнал управления S формируется путем регулирования текущего значения вращающего момента Mact в соответствии с задаваемым опорным значением вращающего момента Mref и путем регулирования текущего значения магнитного потока статора Φact в соответствии с задаваемым опорным значением магнитного потока статора Φref. Следует упомянуть, что сигнал управления S может формироваться при выполнении указанного регулирования методом модуляции длительности импульсов, методом непосредственного управления вращающим моментом или методом, использующим оптимизированные последовательности импульсов.
Как показано на фиг.2, каждое регулирующее устройство 3 имеет для этой цели регулирующий блок 6 для регулирования текущего значения вращающего момента Mact в соответствии с задаваемым опорным значением вращающего момента Mref и для регулирования текущего значения магнитного потока статора Φact в соответствии с задаваемым опорным значением магнитного потока статора Φref, и сигнал управления S, получаемый вследствие такого регулирования, присутствует на выходе регулирующего блока 6. В соответствии со сформированным сигналом S каждый преобразователь 2 соблюдает свое соответственное опорное значение вращающего момента Mref и опорное значение магнитного потока статора Φref, руководствуясь при этом только входными сигналами, поступающими из связанного с ним регулирующего устройства 3.
В случае когда вращающаяся электрическая машина 1 представляет собой асинхронную машину, текущий вращающий момент Mact и текущее значение магнитного потока статора Φact формируются в соответствующем регулирующем устройстве 3 из измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B, из напряжения постоянного тока UDC емкостного накопителя энергии 8, соединенного с соответственным преобразователем 2, и из скорости ротора V.
В этой связи на фиг.4 показан вариант регулирующего устройства 3 для устройства, представленного на фиг.3.На этой фигуре (фиг.4) каждое регулирующее устройство 3 имеет вычислительный блок 5 для формирования текущего значения вращающего момента Mact и текущего значения магнитного потока статора Φact из измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 каждой из группы обмоток статора A, B, из напряжения постоянного тока UDC емкостного накопителя энергии 8 и из скорости ротора V. Как показано на фиг.4, указанные параметры поступают в вычислительный блок 5. Следует упомянуть о том, что скорость ротора V можно измерять, поэтому она является измеряемым параметром. Напряжение постоянного тока UDC емкостного накопителя энергии 8 также является измеряемым параметром. Как уже упоминалось при описании синхронной машины, в принципе, можно измерять только n-1 токов iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B. Соответственные неизмеряемые токи iA1, iA2, iA3; iB1, iB2, iB3 каждой группы обмоток статора A, B могут вычисляться из измеряемых токов iA1, iA2, iA3; iB1, iB2, iB3 в вычислительном блоке 5. Таким образом, для каждой группы обмоток статора А, В можно обойтись без одного трансформатора тока, который требуется для измерения токов, но который дорого стоит, занимает много места и в котором могут возникать неисправности.
Согласно данному способу сигнал управления S формируется путем регулирования текущего значения вращающего момента Mact в соответствии с задаваемым опорным значением вращающего момента Mref и путем регулирования текущего значения магнитного потока статора Φact в соответствии с задаваемым опорным значением магнитного потока статора Φref, как уже описывалось для синхронной машины.
Следует упомянуть, что сигнал управления S может формироваться при выполнении указанного регулирования методом модуляции длительности импульсов, методом непосредственного управления вращающим моментом или методом, использующим оптимизированные последовательности импульсов.
Как показано на фиг.4, каждое регулирующее устройство 3 имеет для этой цели регулирующий блок 6 для регулирования текущего значения вращающего момента Mact в соответствии с задаваемым опорным значением вращающего момента Mref и для регулирования текущего значения магнитного потока статора Φact в соответствии с задаваемым опорным значением магнитного потока статора Φref, и сигнал управления S, получаемый вследствие такого регулирования, присутствует на выходе регулирующего блока 6.
Таким образом, в асинхронной вращающейся электрической машине каждый преобразователь 2 соблюдает свое соответственное опорное значение вращающего момента Mref и опорное значение магнитного потока статора Φref в соответствии со сформированным управляющим сигналом S, руководствуясь при этом только входными сигналами, поступающими из связанного с ним регулирующего устройства 3.
Условные обозначения
1 Вращающаяся электрическая машина
2 Преобразователь
3 Регулирующее устройство
4 Измерительные средства
5 Вычислительный блок
6 Регулирующий блок
8 Емкостный накопитель энергии
A, B Группы обмоток статора вращающейся электрической машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЫЧИСЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ, ТРАНСФОРМАТОРНЫЙ ПОСТ, СОДЕРЖАЩИЙ ТАКУЮ СИСТЕМУ, И СПОСОБ ВЫЧИСЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ ПРИ ПОМОЩИ ТАКОЙ СИСТЕМЫ | 2014 |
|
RU2652170C2 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ЗАЩИТЫ И УСТРОЙСТВО ДЛЯ ДИФФЕРЕНЦИАЛЬНОЙ ЗАЩИТЫ | 2008 |
|
RU2487451C2 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ПОВЫШЕННЫМИ ХАРАКТЕРИСТИКАМИ НАДЕЖНОСТИ | 2012 |
|
RU2488216C1 |
| УСТРОЙСТВО ОБРАБОТКИ ИНФОРМАЦИИ, СИСТЕМА ОБРАБОТКИ ИНФОРМАЦИИ И СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ | 2011 |
|
RU2598598C2 |
| СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2009 |
|
RU2408967C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННЫХ СКВАЖИН | 2000 |
|
RU2172006C1 |
| 2-ОКСИНДОЛЬНЫЕ СОЕДИНЕНИЯ | 2017 |
|
RU2743747C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА КОРОТКОГО ЗАМЫКАНИЯ | 2014 |
|
RU2554282C1 |
| СПОСОБ РЕЛЕЙНОЙ ЗАЩИТЫ ТРАНСФОРМАТОРА | 2016 |
|
RU2617714C1 |
| СПОСОБ И УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННОЙ СКВАЖИНЫ | 2005 |
|
RU2536732C2 |
Изобретение относится к области электротехники и может быть использовано для управления вращающихся электрических машин. Техническим результатом является резервирование, обеспечение независимого регулирования электрических параметров отдельных групп обмоток статора вращающейся электрической машины, упрощение и повышение надежности. В способе управления работой вращающейся электрической машины (1) с, по крайней мере, двумя группами обмоток статора (А, В), в каждом случае каждой группе обмоток статора (А, В) придан преобразователь (2). Каждая группа обмоток статора (А, В) содержит n фазных обмоток, где n≥3, и каждая группа обмоток статора (А, В) получает питание от приданного ей преобразователя (2). Для обеспечения возможности независимого и резервированного регулирования электрических параметров отдельных групп обмоток статора вращающейся электрической машины производится измерение токов (iA1, iA2, iA3, iB1, iB2, iB3), по крайней мере, n-1 фазных обмоток каждой группы обмоток статора (А, В). В каждом случае каждому преобразователю (2) придано одно регулирующее устройство (3). Каждый преобразователь (2) управляется посредством управляющего сигнала (S) соответственного регулирующего устройства (3) независимо от регулирующих устройств (3) других преобразователей (2). Управляющий сигнал (S) формируется в соответствующем регулирующем устройстве (3) на основе указанных измеряемых токов каждой группы обмоток статора (А, В). Раскрыто устройство для осуществления данного способа. 2 н. и 8 з.п. ф-лы, 4 ил.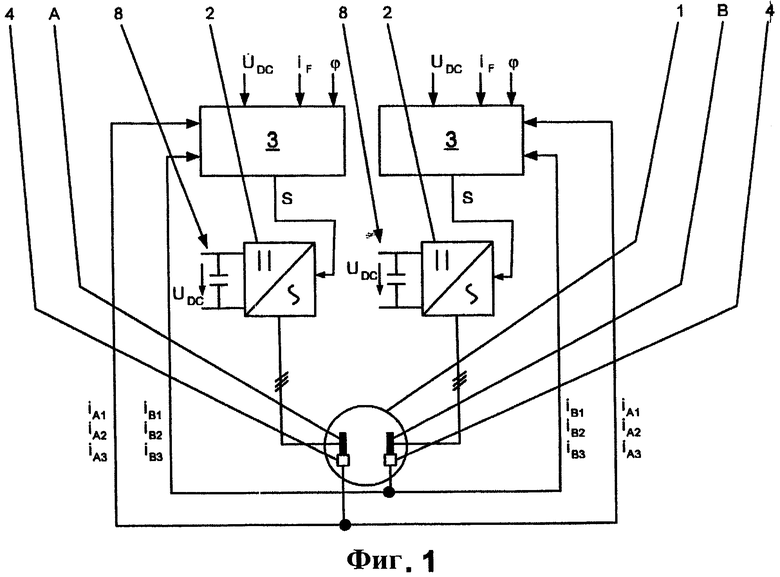
1. Способ управления работой вращающейся электрической машины (1), имеющей, по крайней мере, две группы обмоток статора (А, В), причем каждая группа обмоток статора (А, В) содержит n фазных обмоток, где n≥3, и каждой группе обмоток статора (А, В) в каждом случае придан один преобразователь (2), в котором соответственная группа обмоток статора (А, В) получает питание от приданного ей преобразователя (2), отличающийся тем, что производится измерение токов (iA1, iA2, iA3, 1B1, iB2, iB3), по крайней мере, n-1 фазных обмоток каждой группы обмоток статора (А, В), каждому преобразователю (2) придано одно регулирующее устройство (3) и каждый преобразователь (2) управляется посредством управляющего сигнала (S) связанного с ним регулирующего устройства (3) независимо от регулирующих устройств (3) других преобразователей (2), и управляющий сигнал (S) формируется в соответственном регулирующем устройстве (3) из измеряемых токов (iA1, iA2, iA3; iB1, iB2, iB3) каждой группы обмоток статора (А, В).
2. Способ по п.1, отличающийся тем, что в случае, когда вращающаяся электрическая машина (1) представляет собой синхронную машину, в соответственном регулирующем устройстве (3) формируются текущее значение вращающего момента (Mact) и текущее значение магнитного потока статора (Цact) из измеренных токов (iA1, iA2, iA3, iB1, iB2, iB3) каждой группы обмоток статора (А, В), из напряжения постоянного тока (UDC) емкостного накопителя энергии (8), соединенного с соответственным преобразователем (2), и из положения ротора (φ).
3. Способ по п.2, отличающийся тем, что текущее значение вращающего момента (Mact) и текущее значение магнитного потока статора (Цact) формируются, кроме того, из тока возбуждения (iF).
4. Способ по п.1, отличающийся тем, что в случае, когда вращающаяся электрическая машина (1) представляет собой асинхронную машину, в соответственном регулирующем устройстве (3) формируются текущее значение вращающего момента (Mact) и текущее значение магнитного потока статора (Цact) из измеренных токов (iA1, iA2, iA3; iB1, iB2, iB3) каждой группы обмоток статора (А, В), из напряжения постоянного тока (UDC) емкостного накопителя энергии (8), соединенного с соответственным преобразователем (2), и из скорости ротора (V).
5. Способ по одному из пп.2, 3 или 4, отличающийся тем, что управляющий сигнал (S) формируется путем регулирования текущего значения вращающего момента (Mact) в соответствии с задаваемым опорным значением вращающего момента (Mref) и путем регулирования текущего значения магнитного потока статора (Фact) в соответствии с задаваемым опорным значением магнитного потока статора (Фref).
6. Устройство для осуществления способа управления работой вращающейся электрической машины (1), имеющей, по крайней мере, две группы обмоток статора (А, В), причем каждая группа обмоток статора (А, В) содержит n фазных обмоток, где n≥3, и имеющей в каждом случае один преобразователь (2), приданный каждой группе обмоток статора (А, В) для целей питания, отличающееся тем, что предусмотрены измерительные средства (4) для измерения токов (iA1, iA2, iA3; iB1, iB2, iB3) по крайней мере n-1 фазных обмоток каждой группы обмоток статора (А, В), в каждом случае каждому преобразователю (2) придано одно регулирующее устройство (3) с целью управления преобразователем (2) посредством управляющего сигнала (S) независимо от регулирующих устройств (3) других преобразователей (2), и в каждое регулирующее устройство (3) подаются измеряемые токи (iA1, iA2, iA3; 1B1, iB2, iB3) каждой группы обмоток статора (А, В) для формирования управляющего сигнала (S).
7. Устройство по п.6, отличающееся тем, что в случае, когда вращающаяся электрическая машина (1) представляет собой синхронную машину, каждое регулирующее устройство (3) имеет вычислительный блок (5) для формирования текущего значения вращающего момента (Mact) и текущего значения магнитного потока статора (Фасt) из измеряемых токов (iA1, iA2, iA3; iB1, iB2, iB3) каждой группы обмоток статора (А, В), из напряжения постоянного тока (UDC) емкостного накопителя энергии (8), соединенного с соответственным преобразователем (2), и из положения ротора (φ).
8. Устройство по п.7, отличающееся тем, что в вычислительный блок (5) для формирования текущего значения вращающего момента (Mact) и текущего значения магнитного потока статора (Φact) подается, кроме того, ток возбуждения (iF).
9. Устройство по п.6, отличающееся тем, что в случае, когда вращающаяся электрическая машина (1) представляет собой асинхронную машину, каждое регулирующее устройство (3) имеет вычислительный блок (5) для формирования текущего значения вращающего момента (Mact) и текущего значения магнитного потока статора (Фасt) из измеряемых токов (iA1, iA2, iA3; iB1, iB2, iB3) каждой группы обмоток статора (А, В), из напряжения постоянного тока (UDC) емкостного накопителя энергии (8), соединенного с соответственным преобразователем (2), и из скорости ротора (V).
10. Устройство по одному из пп.7, 8 или 9, отличающееся тем, что каждое регулирующее устройство (3) имеет регулирующий блок (6) для регулирования текущего значения вращающего момента (Mact) в соответствии с задаваемым опорным значением вращающего момента (Mref) и для регулирования текущего значения магнитного потока статора (Фасt) в соответствии с задаваемым опорным значением магнитного потока статора (Фref), и на выходе регулирующего блока (6) присутствует управляющий сигнал (S).
| Феррозонд | 1972 |
|
SU439772A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2092962C1 |
| Электропривод переменного тока | 1983 |
|
SU1421271A3 |
| Рычажный замок | 1986 |
|
SU1397604A1 |
| US 2004196677 A1, 07.10.2004 | |||
| СПУСКОВОЙ МЕХАНИЗМ | 2010 |
|
RU2481536C1 |
| Вулканизуемая резиновая смесь на основе фторкаучука СКФ-26 | 2020 |
|
RU2743699C1 |
| СПОСОБ БИОЛОГИЧЕСКОЙ ОЧИСТКИ СТОЧНЫХ ВОД ОТ ФЕНОЛА | 2000 |
|
RU2188164C2 |
| Погрузчик-подпрессовщик кормов | 1987 |
|
SU1521356A1 |
| WO 9816992 A1, 23.04.1998. | |||

