Предлагаемое изобретение относится к области атомной техники, а именно к устройствам, позволяющим управлять процессом перегрузки ядерного топлива в реакторе типа ВВЭР.
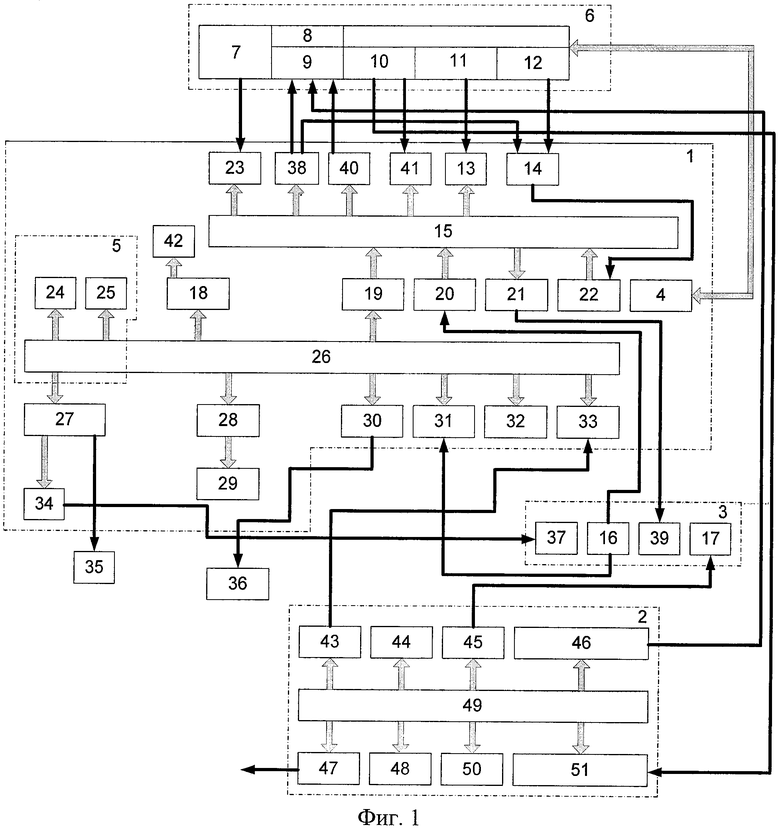
Наиболее близкой к предложенному техническому решению является структура системы управления перегрузочными манипуляторами на базе микропроцессорного устройства ЧПУ (Системы управления перегрузочных манипуляторов атомных электростанций с ВВЭР / А.И.Шиянов, М.И.Герасимов, И.В.Муравьев. - М.: Энергоатомиздат, 1987, - с.65), изображенная на фиг.1, содержащая устройство числового программного управления (УЧПУ) 1, устройство контроля и отображения информации (УКО) 2, пульт автоматизированного управления (ПАУ) 3, пульт дистанционного управления (ПДУ) 4, электронно-вычислительную машину (ЭВМ) 5, исполнительный комплекс перегрузочной машины (ИКПМ) 6, аппаратуру контроля нейтронного потока 7, электроприводы 8, блок связи с электроприводами 9, устройство блокировки и путевые датчики 10, датчики веса 11, датчики линейных перемещений 12, интегрирующий аналого-цифровой преобразователь (АЦП) 13, коммутатор 14, магистраль 15, клавиатуру пульта управления 16, цифровой графический дисплей 17, интерфейс блока преобразования кодов 18, интерфейс связи с ИКПМ 19, третий блок дискретного ввода 20, второй блок дискретного вывода 21, АЦП 22, первый блок дискретного ввода 23, первый центральный процессор (ЦП) 24, первое оперативно-запоминающее устройство (ОЗУ) 25, шину ЭВМ 26, интерфейс печати 27, интерфейс связи с фотосчитывающим устройством 28, фотосчитывающее устройство типа УСЛ-200 29, интерфейс связи с перфоратором 30, интерфейс связи с клавиатурой пульта управления 31, программируемый таймер 32, интерфейс параллельного обмена 33, драйвер 34, электронную печатающую машинку 35, перфоратор типа ПЛ-150 36, блок отображения символьной информации 37, первый блок дискретного вывода 38, устройство индикации 39, цифро-аналоговый преобразователь (ЦАП) 40, второй блок дискретного ввода 41, блок преобразования кодов 42, первое устройство параллельного обмена 43, второй ЦП 44, второе устройство параллельного обмена 45, блок дискретного вывода 46, интерфейс связи с автоматизированными системами высшего уровня 47, второе ОЗУ 48, канал ЭВМ 49, перепрограммируемое постоянное запоминающее устройство 50, блок дискретного ввода 51.
Недостаток данной системы управления состоит в невозможности обеспечить требуемую точность и надежность работы машины с гибким подвесом объектов.
Цель данного изобретения состоит в модификации системы управления в связи с модернизацией объекта управления, а также в повышении точности и надежности работы оборудования за счет применения современных средств и принципов построения систем управления технологическим оборудованием.
Поставленная задача достигается путем применения специально разработанной системы управления для перегрузочной машины с гибким подвесом объектов (патент № 2319236 10.03.2008) в ядерном реакторе типа ВВЭР, представленной на фиг.2, состоящей из исполнительного комплекса ИКПМ 6, УЧПУ 1, устройства контроля и отображения УКО 2 на базе второй программируемой логической интегральной схемы (ПЛИС) 20, пульта автоматизированного управления ПАУ 3, пульта дистанционного (ручного) управления (ПДУ) 4 и периферийных устройств.
ИКПМ 6 связан с первой ПЛИС 14 УЧПУ 1 посредством параллельного 16-разрядного многоканального аналого-цифрового преобразователя (АЦП) 13, последовательного протокола SSI и параллельного протокола. С первой ПЛИС 14 на силовые панели блока связи с электроприводами 9 подаются сигналы, по которым включаются приводы перегрузочной машины (ПМ). Блок связи с электроприводами 9 позволяет управлять электроприводами 8 ПМ в диапазоне скоростей 1-2000 об/мин. Информация о срабатывании устройства блокировки и путевых датчиков 10, сигнал аппаратуры контроля нейтронного потока 7 и данные с датчиков линейных перемещений 12 поступают на первую ПЛИС 14. Информация от датчиков веса 11, выдающих аналоговые сигналы, поступает на первую ПЛИСУ 14 через многоканальный АЦП 13.
ИКПМ 6 связан также с УКО 2 по параллельному протоколу. Эта связь предназначена для блокирования со стороны УКО 2 недопустимых перемещений ПМ и ввода в него информации от аварийных датчиков (блокировок).
В качестве аварийного варианта имеется возможность управления ИКПМ 6 со штатного ПДУ 4.
Ядром предлагаемой системы управления ПМ с гибким подвесом объектов, вокруг которого группируются все остальные подсистемы, является УЧПУ 1. Оно построено на базе электронно-вычислительной машины (ЭВМ) 5, имеющей возможность связи с автоматизированной системой управления АСУ энергоблока. Помимо вышеописанных блоков в состав УЧПУ 1 входит первый микроконтроллер 15, используемый в качестве преобразователя последовательного потока данных в параллельный и наоборот.
К устройству УЧПУ 1 подключается также ПАУ 3, для чего используются PS/2 или USB, DVI или DVB, и LPT интерфейсы.
УКО 2 построено на базе второй ПЛИС 20. В силу возложенных на него функций УКО 2 связано с ИКПМ 6 по параллельному протоколу, а также УКО 2 связано с ЭВМ 5 через второй микроконтроллер 19, также используемый в качестве преобразователя последовательного потока данных в параллельный и наоборот. УКО 2 формирует цифровой видеосигнал с входящей в его состав аналоговой видеокамеры 21 и передает его ЭВМ 5.
Входящие в состав ПАУ 3 клавиатура 16, дисплей 17 и принтер 18 и размещенные на ПАУ 3 средства индикации (на блок-схеме не показаны) образуют подсистему взаимодействия с оператором автоматизированной ПМ. Клавиатура 16, входящая в состав ПАУ 3 и предназначенная для ввода заданий, ввода информации о положении, нагрузках и других параметров ПМ, связана с ЭВМ 5 с использованием протокола PS/2 или USB. Дисплей 17 предназначен для представления персоналу в наиболее оптимальной форме сведений о ходе технологического процесса, состоянии внешней среды ПМ и системы управления перегрузочной машиной (СУПМ), а также для регистрации хода перегрузки топлива. На принтер 18 выводится протокол проведения перегрузки и дублируются наиболее важные сообщения системы.
Блок-схема заявляемой системы управления перегрузочной машиной с гибким подвесом объектов в ядерном реакторе типа ВВЭР представлена на фиг.2.
Система управления состоит из ИКПМ 6, аппаратуры контроля нейтронного потока 7, электроприводов 8, блока связи с электроприводами 9, устройства блокировки и путевых датчиков 10, датчиков веса 11, датчиков линейных перемещений 12, УЧПУ 1, первой ПЛИС 14, многоканального аналого-цифрового преобразователя 13, первого микроконтроллера 15, ЭВМ 5, УКО 2, второго микроконтроллера 19, второй ПЛИС 20, АЦП 22, видеокамеры 21, ПАУ 3, клавиатуры 16, дисплея 17, принтера 18 и ПДУ 4.
Система управления перегрузочной машиной с гибким подвесом объектов в ядерном реакторе типа ВВЭР работает следующим образом. После ввода с клавиатуры 16 заданий и ввода информации о положении, нагрузках и других параметров ПМ ЭВМ 5 передает данные первой ПЛИС 14 через первый микроконтроллер 15. Поступившие на первую ПЛИС 14 данные поступают на блок связи с электроприводами 9, который формирует сигналы, используемые для управления электроприводами 8. Одновременно с поступлением данных от ЭВМ 5 к первой ПЛИС 14 на первую ПЛИС 14 поступают сигналы от аппаратуры контроля нейтронного потока 7, устройства блокировки и путевых датчиков 10, датчиков веса 11 и датчиков линейных перемещений 12.
Для предотвращения аварийных ситуаций, которые могут быть вызваны блокировкой одного из электроприводов 8, используется устройство блокировки и путевые датчики 10, сигнал с которого поступает на вторую ПЛИС 20 УКО 2. В случае возникновения такой аварийной ситуации вторая ПЛИС 20 передаст сигнал аварийной остановки электроприводов 8 блоку связи с электроприводами 9 и операция перегрузки топлива прекратится.
Для визуализации процесса перегрузки топлива применяется видеокамера 21, видеосигнал с которой поступает на АЦП 22. Далее дискретизированный по времени и величине видеосигнал с блока АЦП 22 подается на вторую ПЛИС 20 и через второй микроконтроллер 19 поступает на ЭВМ 5 для последующей его обработки.
В качестве аварийного варианта сохранена возможность управления ИКПМ 6 со штатного ПДУ 4.
ЭВМ 5 выводит на принтер 18 протокол проведения перегрузки и дублирует наиболее важные сообщения системы. Дисплей 17 предназначен для представления персоналу в наиболее оптимальной форме сведений о ходе технологического процесса, состоянии внешней среды, ПМ и СУПМ, а также для регистрации хода перегрузки топлива.
Предложенная система управления удовлетворяет требованиям точности и надежности работы перегрузочной машиной с гибким подвесом объектов за счет применения современных средств и принципов построения систем управления технологическим оборудованием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Программно-аппаратный комплекс выявления опасного приближения рабочей штанги к стенкам бассейна ядерного топлива на основе видеонаблюдения | 2023 |
|
RU2828724C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО ЗАПУСКА С НОСИТЕЛЯ РАКЕТ ПЕРЕНОСНОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА ТИПА "ИГЛА" | 2001 |
|
RU2206041C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ БОЕВОГО КОРАБЛЯ С ПОВЫШЕННОЙ ЖИВУЧЕСТЬЮ | 2011 |
|
RU2510961C2 |
| СПОСОБ УПРАВЛЕНИЯ ОПАСНЫМ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ С НЕСТАЦИОНАРНЫМИ ОБЪЕКТАМИ | 2007 |
|
RU2335025C1 |
| УСТРОЙСТВО ПЕРЕГРУЗКИ ТОПЛИВНЫХ ЭЛЕМЕНТОВ В ЯДЕРНОМ РЕАКТОРЕ ПЕРЕГРУЗОЧНЫМИ МАШИНАМИ С ГИБКИМ ПОДВЕСОМ ОБЪЕКТОВ | 2006 |
|
RU2319236C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МАНЕВРОВЫМИ РАБОТАМИ В ЭЛЕКТРОДЕПО МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2004 |
|
RU2247047C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВАГОНОВ | 2009 |
|
RU2410263C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭНЕРГОВЫДЕЛЕНИЯ В АКТИВНОЙ ЗОНЕ ПО ПОКАЗАНИЯМ НЕЙТРОННЫХ ДЕТЕКТОРОВ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ РЕАКТОРА ТИПА ВВЭР | 2010 |
|
RU2451348C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ НЕЙТРОННО-ФИЗИЧЕСКИХ ПАРАМЕТРОВ ИССЛЕДОВАТЕЛЬСКОЙ ЯДЕРНОЙ УСТАНОВКИ | 2015 |
|
RU2593389C1 |
| Автоматизированный радиационный мониторинг окружающей среды в районе объекта, содержащего радиоактивные вещества | 1990 |
|
SU1716457A1 |
Предлагаемое изобретение относится к области атомной техники, а именно к устройствам, позволяющим управлять процессом перегрузки ядерного топлива в реакторе типа ВВЭР. Система управления перегрузочной машиной с гибким подвесом объектов в ядерном реакторе типа ВВЭР содержит устройство числового программного управления (1), устройство контроля и отображения информации (2), пульт автоматизированного управления (3), пульт дистанционного управления (4), электронную вычислительную машину (5) и исполнительный комплекс перегрузочной машины (6), состоящий из аппаратуры контроля нейтронного потока (7), электроприводов (8), блока связи с электроприводами (9), устройства блокировки и путевых датчиков (10), датчиков веса (11) и датчиков линейных перемещений (12). Устройство числового программного управления (1), на которое поступают данные с аппаратуры контроля нейтронного потока (7), а также с устройства блокировки и путевых датчиков (10), с датчиков веса (11) через многоканальный аналого-цифровой преобразователь (13) и с датчиков линейных перемещений (12), содержит первую программируемую логическую интегральную схему (14), связанную с первым микроконтроллером (15), подключенным по последовательному протоколу к электронной вычислительной машине (5), которая соединена с устройством контроля и отображения информации (2) на базе второй программируемой логической интегральной схемы (20) и пультом автоматизированного управления (3). Предложенная система управления обеспечивает точность и надежность работы перегрузочной машиной с гибким подвесом объектов за счет применения современных средств и принципов построения систем управления технологическим оборудованием. 2 з.п. ф-лы, 2 ил.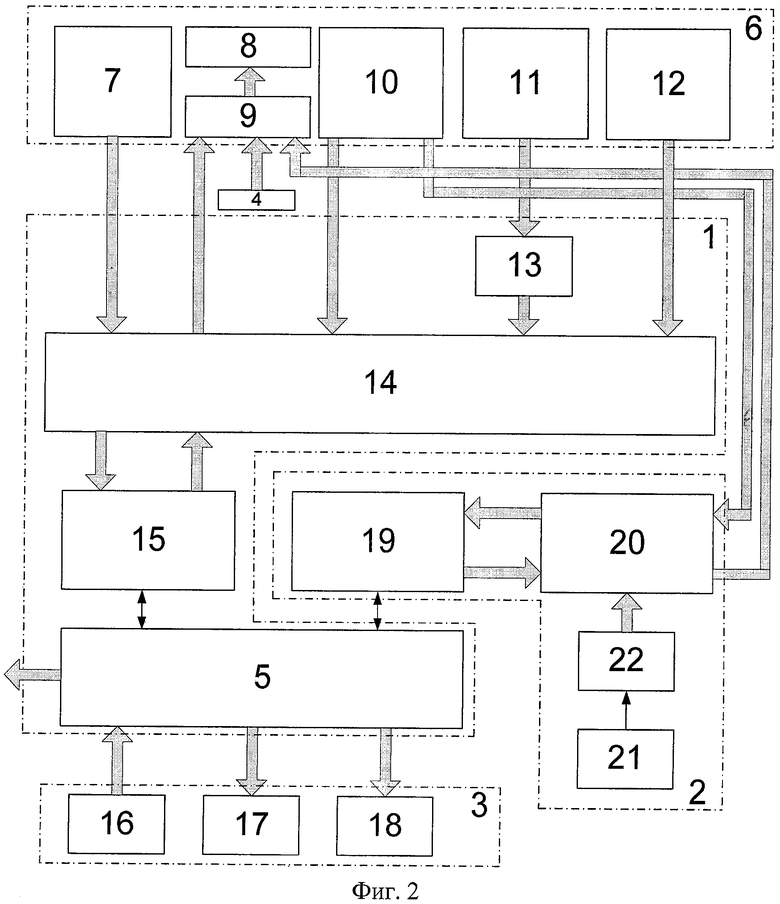
1. Система управления перегрузочной машиной с гибким подвесом объектов в ядерном реакторе типа ВВЭР, содержащая устройство числового программного управления (1), устройство контроля и отображения информации (2), пульт автоматизированного управления (3), пульт дистанционного управления (4), электронную вычислительную машину (5) и исполнительный комплекс перегрузочной машины (6), состоящий из аппаратуры контроля нейтронного потока (7), электроприводов (8), блока связи с электроприводами (9), устройства блокировки и путевых датчиков (10), датчиков веса (11) и датчиков линейных перемещений (12), отличающаяся тем, что устройство числового программного управления (1), на которое поступают данные с аппаратуры контроля нейтронного потока (7), а также с устройства блокировки и путевых датчиков (10), с датчиков веса (11) через многоканальный аналого-цифровой преобразователь (13) и с датчиков линейных перемещений (12), содержит первую программируемую логическую интегральную схему (14), связанную с первым микроконтроллером (15), подключенным по последовательному протоколу к электронной вычислительной машине (5), которая соединена с устройством контроля и отображения информации (2) и пультом автоматизированного управления (3).
2. Система управления перегрузочной машиной с гибким подвесом объектов в ядерном реакторе типа ВВЭР по п.1, отличающаяся тем, что устройством контроля и отображения информации (2) содержит второй микроконтроллер (19), соединенный со второй программируемой логической интегральной схемой (20), которая связана с последовательно соединенными видеокамерой (21) и аналого-цифровым преобразователем (22), вторая программируемая логическая интегральная схема (20) устройства контроля и отображения информации (2), также соединена с устройством блокировки и путевыми датчиками (10) исполнительного комплекса перегрузочной машины (6) и блоком связи с электроприводами (9), связанного с пультом дистанционного управления (4).
3. Система управления перегрузочной машиной с гибким подвесом объектов в ядерном реакторе типа ВВЭР по п.1, отличающаяся тем, что пульт автоматизированного управления (3) содержит клавиатуру (16), подключенную по протоколу PS/2 или USB к электронной вычислительной машине (5), дисплей (17), соединенный по протоколу DVI или DVB с электронной вычислительной машиной (5) и принтер (18), который по протоколу USB или LPT также подключен к электронной вычислительной машине (5).
| Шиянов А.И | |||
| и др | |||
| Системы управления перегрузочных манипуляторов атомных электростанций с ВВЭР | |||
| - М.: Энергоатомиздат, 1987, с.65 | |||
| Устройство для регулирования вертикальных ветродвигателей при помощи руля | 1935 |
|
SU45852A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ И УПРАВЛЕНИЯ ЗАХВАТОМ ПЕРЕГРУЗОЧНОЙ МАШИНЫ ЯДЕРНОГО РЕАКТОРА | 1986 |
|
SU1459507A1 |
| Устройство для выдвижения телескопического рештака механической лопаты | 1948 |
|
SU78477A1 |
| US 5043132 A, 27.08.1991. | |||

