Изобретение относится к области измерения параметров движения объектов и может быть применено для определения положения и скорости взаимного перемещения объектов.
Известен способ определения скорости объекта, движущегося относительно другого объекта [1], при котором измеряют сигнал с преобразователя магнитного поля в виде катушки индуктивности, установленной на неподвижном основании (стволе), охватывающем движущийся объект (снаряд). Катушка взаимодействует с двумя источниками магнитного поля в виде кольцевых постоянных магнитов, установленных на снаряде, с намагниченностью, ориентированной вдоль направления его движения. При прохождении снаряда с постоянными магнитами вблизи катушки потокосцепление (магнитный поток) в ней изменяется и появляются сигналы (эдс), по которым определяют скорость движения объекта.
Недостатками известного способа являются: низкая точность определения мгновенной скорости объекта в месте расположения датчика из-за усреднения времени прохождения объекта на базе конечной длины (расстоянии между постоянными магнитами в направлении движения снаряда); сложность устройства для реализации способа, обусловленная необходимостью применения двух источников магнитного поля; низкая точность определения скоростей движения объекта в области малых значений из-за снижения чувствительности преобразователя магнитного поля, выполненного на основе катушки индуктивности.
Наиболее близким техническим решением (прототипом) является способ измерения скорости с помощью устройства [2]. Он заключается в том, что измеряют интервал Δt времени между сигналами измерителя магнитного поля, установленного на одном из объектов, движущемся относительно неподвижного основания, и взаимодействующего с двумя источниками магнитного поля, расположенными на другом, неподвижном, объекте - основании. Скорость движения объекта (усредненное значение на заданной базе) определяется расстоянием между источниками магнитного поля и временем прохождения объекта от одного источника к другому.
Недостатками способа-прототипа являются: низкая точность определения мгновенной скорости объекта в месте расположения датчика из-за усреднения времени прохождения объекта на достаточно большой базе (расстоянии между источниками магнитного поля в направлении движения объекта); сложность устройства для реализации способа, обусловленная необходимостью применения двух источников магнитного поля.
Предлагаемое изобретение направлено на повышение точности определения мгновенной скорости движения объекта и упрощение устройства для реализации способа.
Указанный технический результат достигается тем, что в способе определения скорости движения одного объекта относительно другого, включающем определение зависимости во времени t параметра магнитного поля с помощью измерителя, расположенного на одном из объектов и взаимодействующего с источником магнитного поля, расположенным на другом объекте, и определение скорости с использованием указанной зависимости, согласно изобретению в качестве источника магнитного поля используют постоянный магнит с плоскостью симметрии магнитного поля, совпадающей с направлением движения объекта, и намагниченностью, перпендикулярной или параллельной направлению движения объекта, измеряют во времени составляющую b магнитной индукции В, лежащую в указанной плоскости и направленную вдоль или поперек направления движения объекта. Далее определяют первую производную зависимости b(t), выбирают одно или более экстремальных значений П зависимости (db/dt)(t) а скорость движения объекта определяют по формуле ν=П/А, где А - соответствующее параметру П экстремальное значение первой производной зависимости параметра b от длины в направлении движения объекта.
Кроме того, дополнительно определяют одно из экстремальных значений bм зависимости b(t), а параметр А выбирают из семейства градуировочных зависимостей А(bм).
Выбор в качестве источника магнитного поля постоянного магнита с плоскостью симметрии магнитного поля, совпадающей с направлением движения объекта, позволяет использовать градуировочные зависимости составляющих b магнитной индукции от длины l в направлении взаимного перемещения объектов, т.е. характеристики b(l), для вычисления скорости движения объекта по измеряемой зависимости b(t). При этом дополнительное определение одного из экстремальных значений bм на измеряемой временной характеристике и использование семейства градуировочных зависимостей А(bм) дает возможность устранить влияние неконтролируемого расстояния δ между измерителем и магнитом в момент отсчета показаний, поскольку параметр bм однозначно связан с указанным расстоянием. Ориентация намагниченности магнита и оси чувствительности датчика магнитного поля вдоль или поперек направлению движения объекта обеспечивает получение простых, симметричных относительно начала координат, характеристик b(l).
Таким образом, имеется возможность с помощью одного магнита и одного датчика магнитного поля (вместо обычно применяемых двух датчиков и одного источника либо двух источников и одного датчика магнитного поля) определять мгновенную скорость в месте расположения датчика независимо от расстояния δ между ним и магнитом.
Из уровня техники известен способ измерения мгновенной скорости вращения [3] по максимальному значению эдс с катушки индуктивности, установленной на вращающемся валу и взаимодействующей с магнитным полем постоянного магнита, расположенного на неподвижном объекте (основании). Недостатком способа с использованием катушки индуктивности является низкая точность определения максимального значения эдс из-за влияния помех, наводимых в катушке, а также ограниченные возможности миниатюризации устройства из-за больших габаритов катушек по сравнению с измерителями магнитного поля (например, датчиками Холла). Кроме того, необходимость изготовления специальных катушек создает неудобства при серийном изготовлении устройств и приводит к их удорожанию.
Другие существенные отличительные от прототипа признаки предлагаемого технического решения не обнаружены из уровня техники, поэтому считаем, что оно соответствует критерию изобретения «изобретательский уровень».
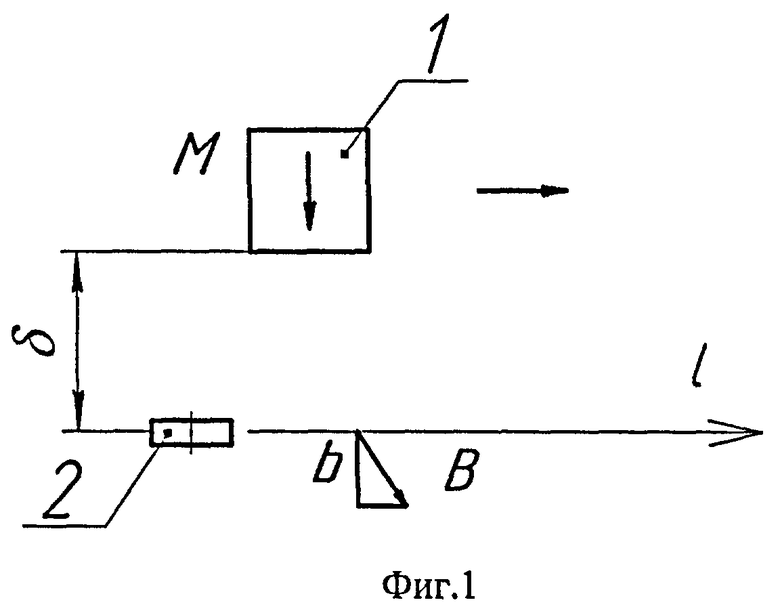
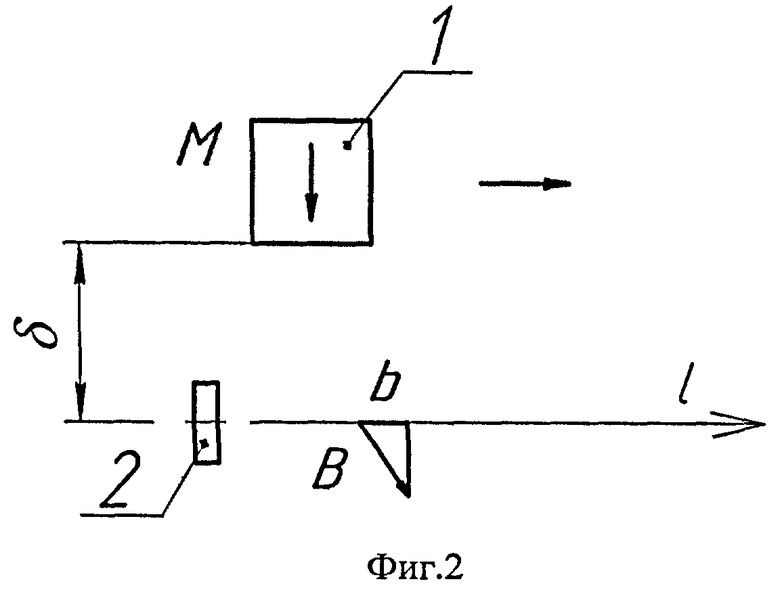
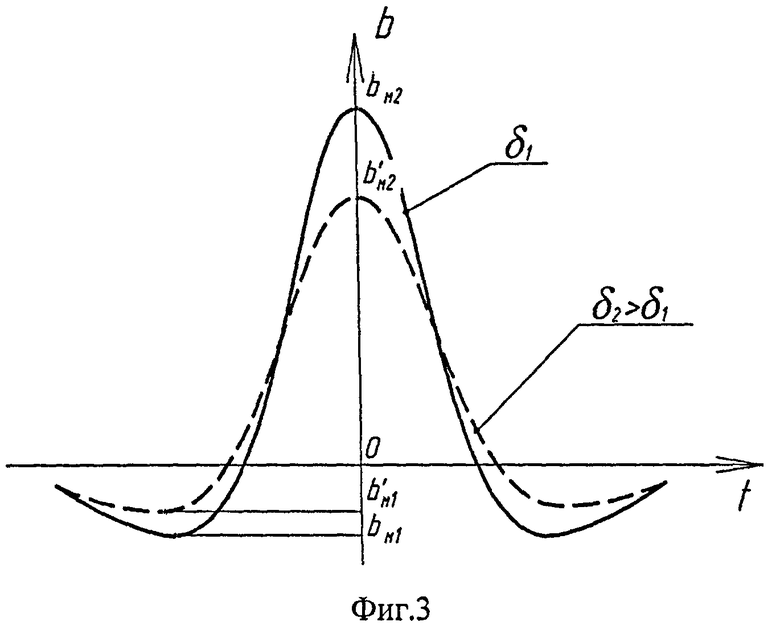
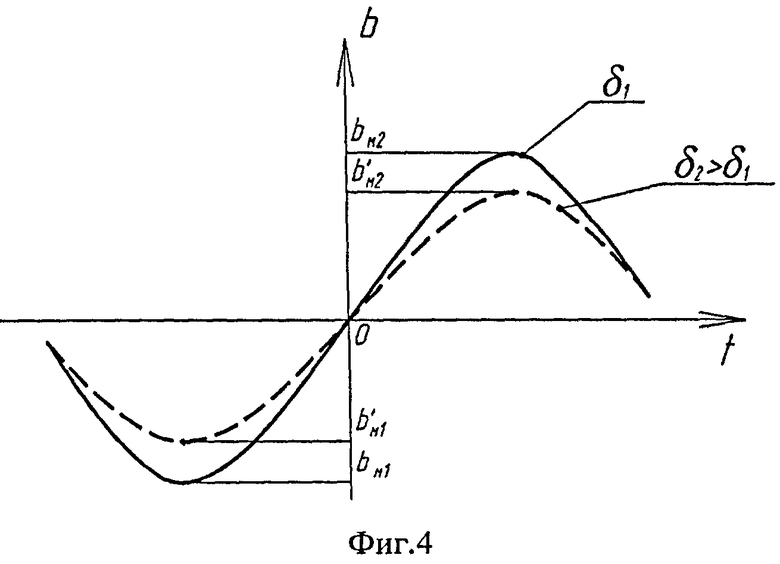
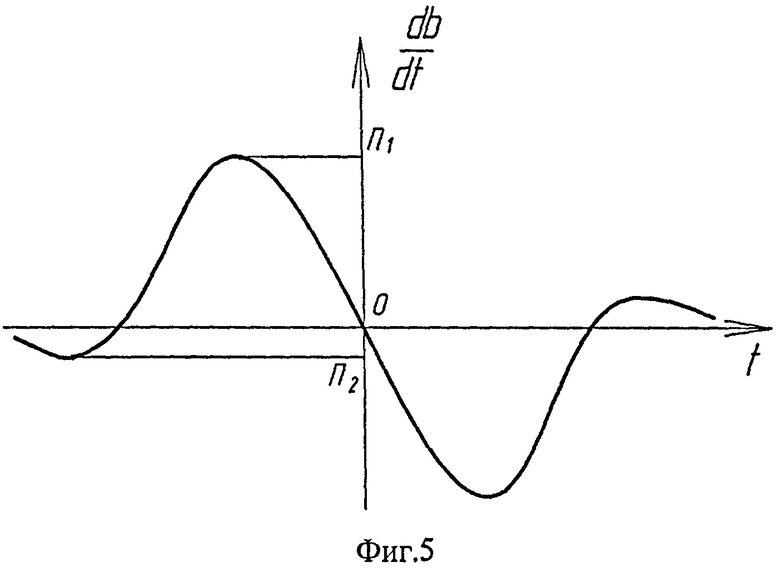
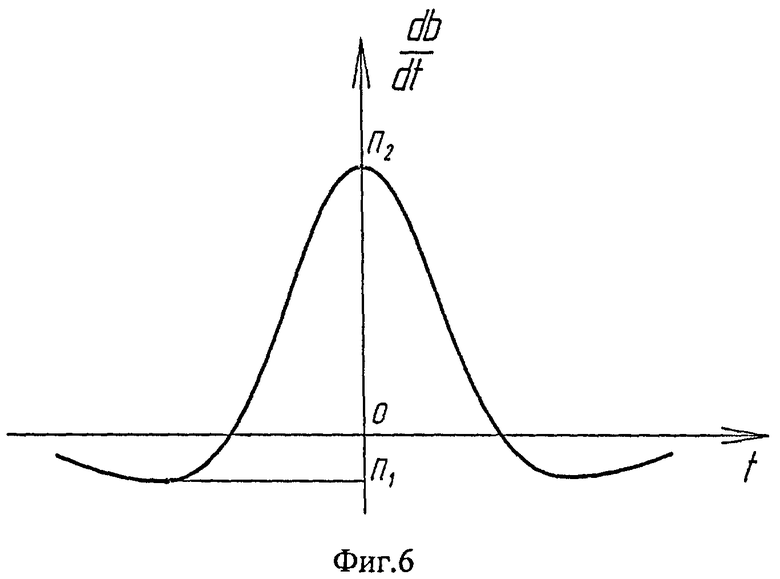
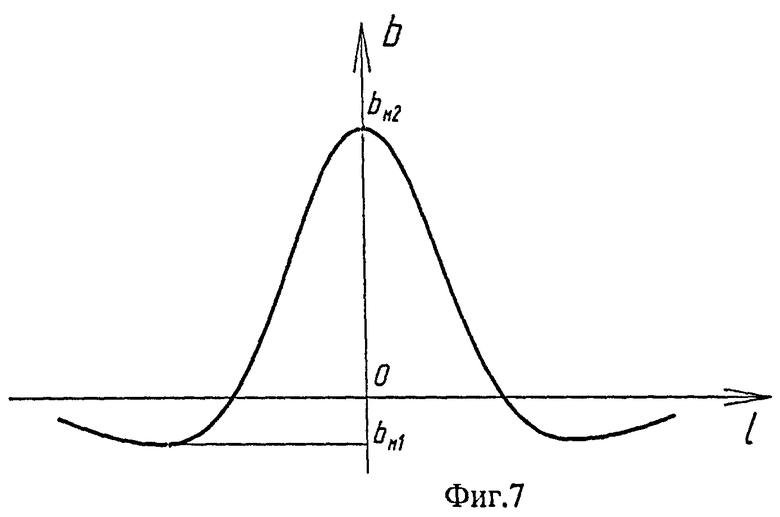
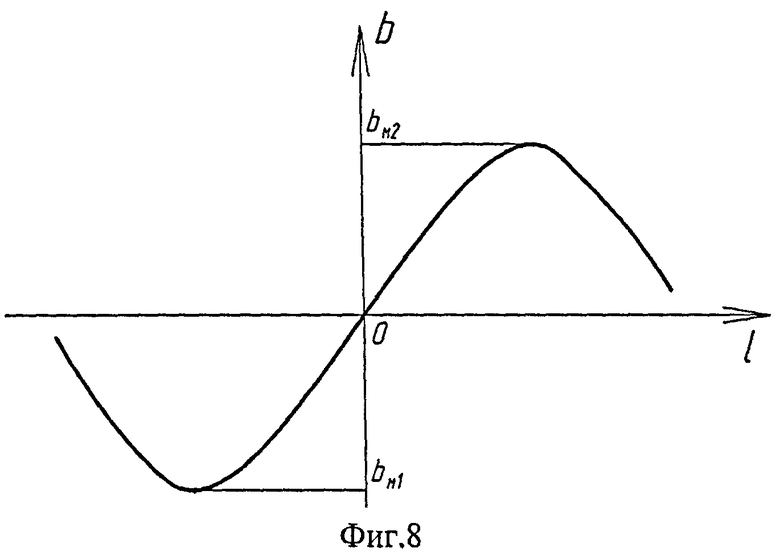
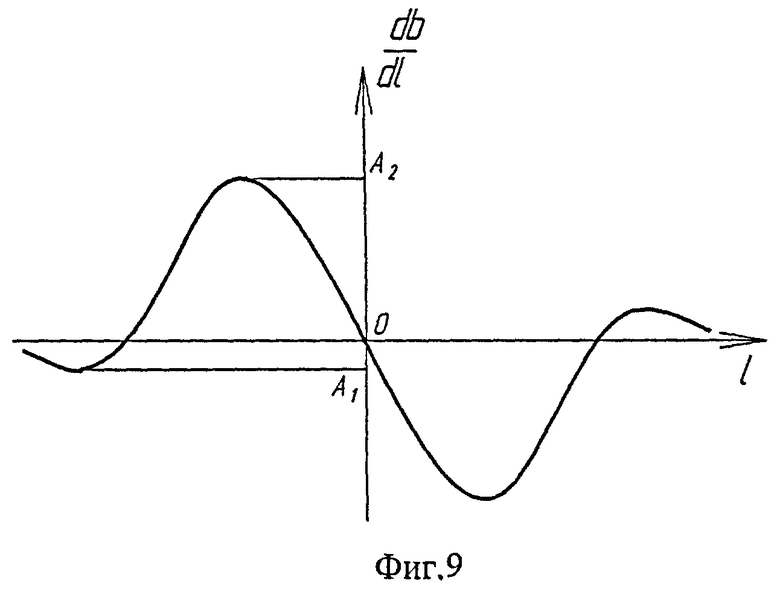
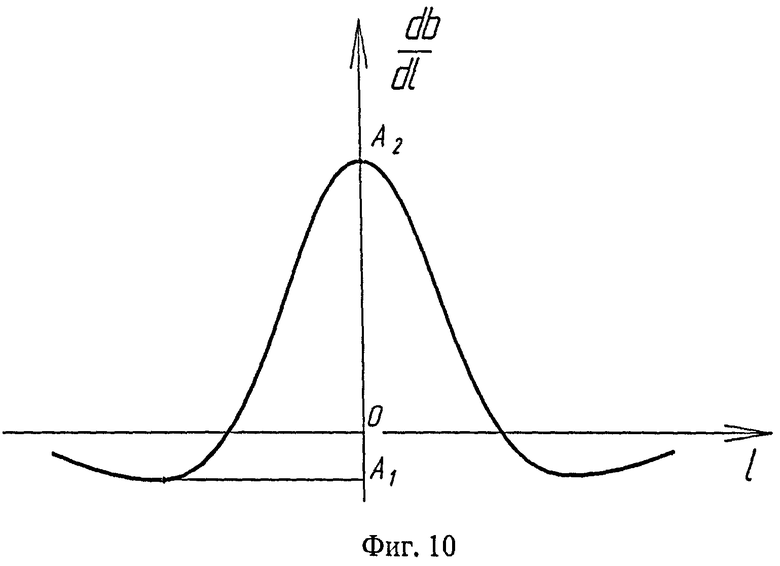
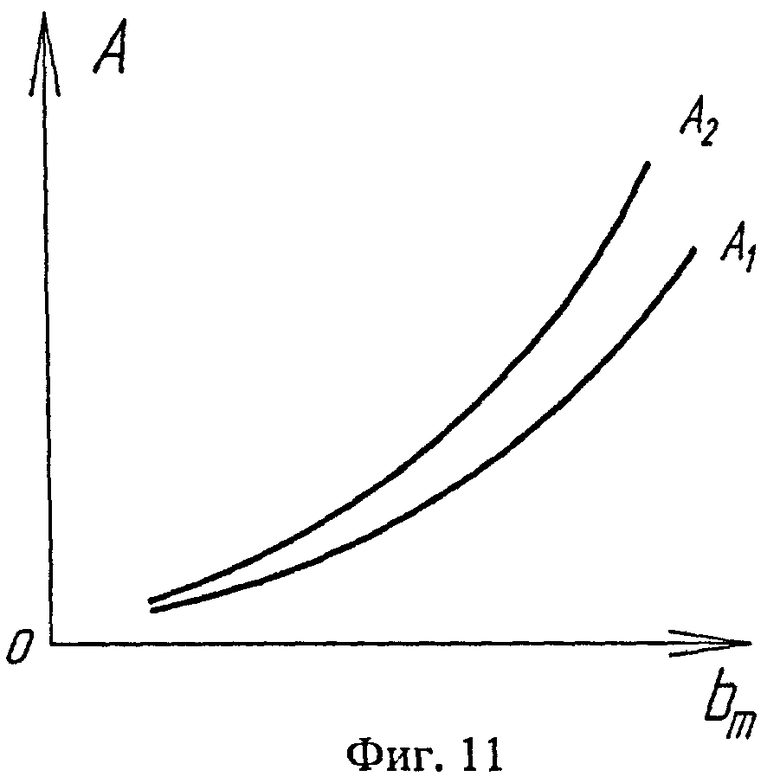
Изобретение поясняется чертежами, где на фиг.1 показана схема взаимного положения постоянного магнита с плоскостью симметрии магнитного поля, совпадающей с направлением движения объекта, и датчика магнитного поля с осью чувствительности, лежащей в указанной плоскости и направленной перпендикулярно направлению движения объекта; на фиг.2 - то же, с осью чувствительности датчика, ориентированной вдоль направления движения объекта; на фиг.3 - зависимость от времени t составляющей b магнитной индукции на ось чувствительности датчика по схеме фиг.1; на фиг.4 - то же для составляющей b магнитной индукции на ось чувствительности датчика по схеме фиг.2; на фиг.5 - первая производная зависимости b(t) по фиг.3; на фиг.6 - первая производная зависимости b(t) по фиг.4; на фиг.7 - зависимость составляющей b магнитной индукции на ось чувствительности датчика по схеме фиг.1 от длины l в направлении движения магнита; на фиг.8 - то же, для составляющей b магнитной индукции на ось чувствительности датчика по схеме фиг.2; на фиг.9 - первая производная зависимости b(l) по фиг.7; на фиг.10 - первая производная зависимости b(l) по фиг.8; на фиг.11 - градуировочная зависимость параметра А от выбранного экстремального значения bм магнитной индукции.
Устройство для реализации предлагаемого способа (фиг.1, 2) состоит из источника магнитного поля - постоянного магнита 1 с плоскостью симметрии магнитного поля (плоскостью, проходящей через ось симметрии магнитного поля), совпадающей с направлением движения объекта, и измерителя (датчика) 2 магнитного поля (например, датчика Холла), с осью чувствительности, лежащей в указанной плоскости. При цилиндрической форме магнита с осевой намагниченностью плоскости симметрии магнитного поля проходят через ось цилиндра, а при выполнении магнита в форме прямоугольного параллелепипеда (в частности, куба) такие плоскости проходят через центр параллелепипеда параллельно граням (в кубе - также по ребрам), совпадающим по направлению с намагниченностью магнита. Магнит располагается на движущемся объекте, а датчик - на неподвижном объекте (объекты на фигурах не показаны), направление перемещения магнита относительно датчика показано стрелкой. Намагниченность М постоянного магнита 1 в обоих случаях перпендикулярна направлению движения, а ось чувствительности датчика 2 в одном случае ориентирована поперек направления движения (фиг.1), в другом случае - вдоль направления движения объекта (фиг.2). Возможно также направление намагниченности магнита, совпадающее с направлением движения. Кроме того, магнит может располагаться на неподвижном, а датчик - на подвижном объекте.
Способ определения скорости движения объекта заключается в следующем.
При движении магнита 1, установленного на движущемся объекте, относительно датчика 2 (например, по схеме фиг.1) последний фиксирует изменяющееся во времени магнитного поле, при этом зависимость от времени t составляющей b магнитной индукции В будет иметь вид, показанный на фиг.3. После измерения зависимости b(t) вычисляют ее первую производную - (db/dt)(t) (фиг.5), выбирают на ней одно или более экстремальных значений П (например, минимальное П1 и/или максимальное П2 значения производных) и определяют мгновенную скорость движения объекта (скорость взаимного перемещения магнита и датчика) по формуле ν=П/А, где А - соответствующее выбранному параметру П экстремальное значение первой производной зависимости b(l) (фиг.7), например, минимальное A1 и/или максимальное А2 значения производных (фиг.9), соответствующих параметрам П1 и П2 на фиг.5. Зависимости b(l) (фиг.7) и (db/dl)(l) (фиг.9) характеризуют топографию магнитного поля вблизи магнита и при постоянной величине δ (фиг.1) на участке отсчета параметров П и А являются неизменными.
Аналогично осуществляется способ определения скорости движения объекта по схеме фиг.2. При движении магнита 1 относительно датчика 2 последний фиксирует зависимость b(t) (фиг.4). Вычисляют ее первую производную - (db/dt)(t) (фиг.6), выбирают на ней одно или более экстремальных значений П (например, минимальное П1 и/или максимальное П2 значения производных) и определяют мгновенную скорость движения объекта по формуле ν=П/А, где А - соответствующее выбранному параметру П экстремальное значение первой производной зависимости b(l) (фиг.8), например, минимальное A1 и/или максимальное А2 значения производных (фиг.10), соответствующих параметрам П1 и П2 на фиг.6.
Во всех случаях мгновенная скорость на участке снятия кривой b(t) определяется, вообще говоря, выражением ν=dl/dt=(db/dt)/(db/dl). Однако во всех точках зависимости b(t), кроме тех, которые соответствуют экстремальным значениям ее первой производной, установить соответствие между производными (db/dt) и (db/dl), т.е. определить скорость ν, не представляется возможным. Это возможно только в точках экстремумов на указанных производных, поскольку максимальное изменение параметра b на кривой (db/dt)(t) строго соответствует максимальному изменению b на кривой (db/dl)(l). При этом определяется мгновенная скорость движения в точках по длине l, соответствующих выбранным экстремумам A1 или А2 на кривой (db/dl)(l).
При непостоянстве зазора δ между магнитом 1 и датчиком 2 (фиг.1, 2) дополнительно определяют одно из экстремальных значений bм зависимостей b(t), а параметр А выбирают из семейства градуировочных зависимостей А1(bм) и/или А2(bм) (фиг.11). Поскольку параметр bм однозначно связан с величиной δ (с увеличением δ, как показано на фиг.3 и 4, от значения δ1 до δ2 параметр bм уменьшается от bм2 до bм2'), то представляется возможным увеличить точность определения скорости движения объекта за счет использования заранее снятых на магните характеристик А(bм), соответствующих выбранным экстремальным значениям А (A1 и/или А2, фиг.11).
Источники информации
1. Bogdanoff D.W., Knowlen С., Murakami D. and Stonich I. Magnetic Detector for Projectiles in Tubes. - AIAA Jornal, Vol.28, N11, 1990, p.p.1942-1944.
2. Описание к патенту РФ на изобретение «Датчик положения объекта» №2339957, G01P 3/42 (прототип).
3. Описание к патенту РФ на изобретение «Устройство для измерения мгновенной скорости вращения» №2227304, G01P 3/487.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения времени продольной релаксации Т1 текущей жидкости методом ядерного магнитного резонанса | 2020 |
|
RU2740181C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕПЛОПРОВОДНОСТИ ФЕРРОМАТЕРИАЛОВ | 2006 |
|
RU2324925C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРИВОЙ НАМАГНИЧИВАНИЯ ФЕРРОМАГНИТНОГО МАТЕРИАЛА | 2005 |
|
RU2293344C1 |
| ИЗМЕРИТЕЛЬНЫЙ ЗОНД И СОДЕРЖАЩЕЕ ЕГО УСТРОЙСТВО АУТЕНТИФИКАЦИИ | 2002 |
|
RU2292055C2 |
| МАГНИТНЫЙ СПОСОБ ПОИСКА ГРАНИЦ ИЗМЕНЕНИЯ ВЕЩЕСТВА В ОБЪЕКТЕ (СПОСОБ ЗЕМЦОВА) | 1998 |
|
RU2164356C2 |
| Регистратор ускорения | 1987 |
|
SU1509746A1 |
| ИНДУКЦИОННЫЙ ДАТЧИК | 1997 |
|
RU2125276C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОЙ ВЯЗКОСТИ ФЕРРОМАГНЕТИКОВ | 2007 |
|
RU2338216C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ СЕЙСМОПРИЕМНИК УСКОРЕНИЙ С НАИМЕНЬШИМ КОЭФФИЦИЕНТОМ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ | 1999 |
|
RU2155358C1 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ ЭЛЕКТРОМАГНИТНЫХ ВОЛН В ТЕРАГЕРЦОВОМ ДИАПАЗОНЕ | 2015 |
|
RU2599332C1 |
Изобретение относится к области измерения параметров движения объектов и может быть применено для определения положения и скорости взаимного перемещения объектов. Способ включает определение зависимости во времени t составляющей b магнитной индукции, направленной вдоль или поперек направления движения объекта с помощью измерителя, расположенного на одном из объектов и взаимодействующего с источником магнитного поля, расположенным на другом объекте. В качестве источника магнитного поля используют постоянный магнит с плоскостью симметрии магнитного поля, совпадающей с направлением движения объекта, и намагниченностью, перпендикулярной или параллельной направлению движения объекта. Определяют первую производную зависимости b(t), выбирают одно или более экстремальных значений П зависимости (db/(dt)(t), а скорость движения объекта определяют по формуле ν=П/А, где А - соответствующее параметру П экстремальное значение первой производной зависимости параметра b от длины в направлении движения объекта. Кроме того, дополнительно определяют одно из экстремальных значений bм зависимости b(t), а параметр А выбирают из семейства градуировочных зависимостей A(bм). Изобретение позволяет повысить точность определения мгновенной скорости движения объекта и упростить устройство для реализации способа. 1 з.п. ф-лы, 11 ил.
1. Способ определения скорости движения одного объекта относительно другого, включающий определение зависимости во времени t параметра магнитного поля с помощью измерителя, расположенного на одном из объектов и взаимодействующего с источником магнитного поля, расположенным на другом объекте, и определение скорости с использованием указанной зависимости, отличающийся тем, что в качестве источника магнитного поля используют постоянный магнит с плоскостью симметрии магнитного поля, совпадающей с направлением движения объекта, и намагниченностью, перпендикулярной или параллельной направлению движения объекта, измеряют во времени составляющую b магнитной индукции В, лежащую в указанной плоскости и направленную вдоль или поперек направления движения объекта, определяют первую производную зависимости b(t), выбирают одно или более экстремальных значений П зависимости (db/dt)(t), а скорость движения объекта определяют по формуле ν=П/А, где А - соответствующее параметру П экстремальное значение первой производной зависимости параметра b от длины в направлении движения объекта.
2. Способ по п.1, отличающийся тем, что дополнительно определяют одно из экстремальных значений bм зависимости b(t), а параметр А выбирают из семейства градуировочных зависимостей A(bм).
| ДАТЧИК ПОЛОЖЕНИЯ ОБЪЕКТА | 2007 |
|
RU2339957C2 |
| RU 2007116894 A, 20.11.2007 | |||
| BOGDANOFF D.W | |||
| et al | |||
| Magnetic Detector for Projectiles in Tubes | |||
| AIAA Journal, v.28, №11, 1990, p.1942-1944 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| СПОСОБ ЛЕЧЕНИЯ ОБОСТРЕНИЯ ХРОНИЧЕСКОГО ПАНКРЕАТИТА | 1999 |
|
RU2164154C2 |
| JP 2006030177 A, 02.02.2006. | |||

