Область изобретения
Настоящее изобретение относится к системе формирования изображения излучения, а именно к системе формирования изображения излучения, которая формирует четкое изображение излучения для проверки автомобилей, двигающихся на высокой скорости, и может быть использовано для рентгеновской инспекционной системы.
Предпосылки создания изобретения
Во время формирования изображения методом сканирования акселератор генерирует высокоэнергетический рентгеновский импульс, который проходит сквозь сканируемый объект. Высокочувствительные детекторные матрицы регистрируют рентгеновское излучение и преобразуют его в выходной электрический сигнал. Затем в реальном режиме времени подсистема сбора данных формирует столбцы цифровых изображений. После окончания процесса сканирования на пункте управления системой формируется окончательное изображение всего сканируемого объекта.
В системе формирования изображения основной функцией акселератора является генерирование регулируемых рентгеновских импульсов. Детектор преобразует рентгеновские лучи, прошедшие сквозь сканируемый объект в аналоговый электрический сигнал, а затем пересылает сигнал в систему сбора данных. Система сбора данных преобразует аналоговый электрический сигнал, полученный детектором, в цифровой сигнал. В зависимости от цифрового сигнала формируется его изображение в системе формирования изображения.
В существующих системах формирования изображений скорость сканирования не достаточно высокая, приблизительно 4 км/час. В связи с повышением требований к инспекционному оборудованию срочно потребовались высокоскоростные системы сканирования для инспектирования в целях безопасности, например для инспектирования автотранспорта в портах и других пунктах досмотра без его парковки, или для медленного контроля поездов и т.п.
В частности, основной проблемой является невозможность достижения высокоскоростного формирования изображения при движении автомобиля с высокой скоростью, например 30 км/ч. Существуют два типа широко используемых систем формирования изображения в рентгеновских инспекционных системах, а именно: 1) системы, спроектированные на базе специализированных шин передачи данных, в соответствии со структурой системы; 2) системы на основе передачи данных с использованием технологии полевых шин. Принимая во внимание, что целью является инспекционная система с высокоскоростным формированием изображения, подход, основанный на проектировании специализированных шин передачи данных, имеет существенных недостаток, связанный с трудностями его дальнейшего развития. При увеличении числа детекторов объем передаваемых данных по оригинальной шине может не соответствовать требованиям, что потребует переконструирования системы. Однако технология полевых шин, применяемая в рентгеновских инспекционных системах, имеет низкую скорость передачи данных, например шина CAN (асинхронная последовательная коммуникационная шина), обеспечивающая скорость передачи данных в 1 Мбит/с, не может использоваться для решения задачи высокоскоростного формирования изображения в реальном времени и передачи данных большого объема.
Краткое описание изобретения
Техническим результатом настоящего изобретения является разработка высокоскоростной системы формирования изображения излучения для инспекции железнодорожных вагонов, которая обеспечивает стабильность высокоскоростного сбора и преобразования данных, правильную и надежную передачу данных, во время прохождения инспектируемого объекта через коридор сканирования на большой скорости путем увеличении числа детекторов с возможностью удовлетворения требований за счет расширения системы сбора данных.
В аспекте настоящего изобретения предлагается система формирования изображения излучения, включающая акселератор (ускоритель) для генерирования лучей, проходящих через инспектируемые объекты, и синхронного сигнала; детектор для обнаружения лучей; сигнальный процессор для генерирования сигнала выбора в зависимости от синхронного сигнала, таким образом, чтобы выбрать один детектор для обнаружения лучей; преобразователь данных для преобразования обнаруженного детектором сигнала в цифровой вид, а затем буферизацию цифровых данных в сигнальном процессоре и связной контроллер, подключенный к процессору обработки изображений, приспособленный для передачи в процессор обработки изображений цифровых данных, буферизированных в сигнальном процессоре.
Предпочтительно, чтобы преобразователь данных и сигнальный процессор были соединены через параллельные шины.
Предпочтительно, чтобы сигнальный процессор и связной контроллер были соединены через параллельные шины. Предпочтительно, чтобы связной контроллер и процессор обработки изображений были соединены через высокоскоростные последовательные магистральные шины.
Предпочтительно, чтобы система сбора данных, включающая преобразователь данных, сигнальный процессор и связной контроллер, была выполнена с возможностью расширения. Предпочтительно, чтобы расширение системы сбора данных выполнялось за счет расширения шин процессора обработки сигналов. Предпочтительно, чтобы связной контроллер был выполнен на базе RISC процессора.
Предпочтительно, чтобы частота сканирования лучей была выше 40 Гц.
Предпочтительно, чтобы скорость инспектируемого объекта была выше 4 км/ч.
Предпочтительно, чтобы число детекторных элементов, составляющих детектор, могло быть выполнено с возможностью увеличения.
Сущность изобретения заключается в том, что скорость получения данных в рентгеновской инспекционной системе увеличивается, при этом возможность расширения системы дает возможность широкого применения системы не только в системах инспектирования железнодорожных вагонов со скоростью 30 км/ч и выше, но также может применяться в других продуктах в области неразрушающего контроля.
Краткое описание чертежей
Описанные выше характеристики и преимущества настоящего изобретения будут более очевидны из последующего детального описания, сопровождаемого чертежами, на которых: на Фиг.1 представлена принципиальная схема для иллюстрации быстрого синхронизируемого сканирования по настоящему изобретению и медленного синхронизируемого сканирования прототипа;
на Фиг.2 представлена принципиальная схема для иллюстрации детектора с удвоенной площадью по настоящему изобретению и традиционный детектор прототипа;
на Фиг.3 представлена функциональная блок-схема высокоскоростной подсистемы сбора данных на базе Ethernet согласно варианту настоящего изобретения;
на Фиг.4 представлена подробная структурная блок-схема модуля Ethernet показанного на Фиг.3
и на Фиг.5 представлена блок-схема высокоскоростной подсистемы сбора данных, используемой в инспекционной системе железнодорожных вагонов, согласно варианту настоящего изобретения.
Детальное описание предпочтительных вариантов изобретения
Система формирования изображения излучения содержит акселератор (ускоритель) 100 для генерирования лучей, проходящих через инспектируемые объекты, и синхронного сигнала; детектор 10 для обнаружения лучей, подключенный к детектору 10, преобразователь данных (модуль преобразования данных) - 21А, 21В, 21С для преобразования обнаруженного детектором 10 сигнала в цифровой вид, а затем буферизацию цифровых данных в сигнальном процессоре (модуле обработки сигналов) 22А, 22В, 22С для генерирования сигнала выбора в зависимости от синхронного сигнала, таким образом, чтобы выбрать один детектор для обнаружения лучей; и взаимосвязанный с ним связной контроллер (модуль управления передачей данных) 23А, 23В, 23С, который подключен к процессору обработки изображений (хост-компьютеру) 30, приспособленному для передачи в него цифровых данных, буферизированных в сигнальном процессоре 22А, 22В, 22С.
Преобразователь данных (модуль преобразования данных) - 21А, 21В, 21С, сигнальный процессор (модуль обработки сигналов) 22А, 22В, 22С и связной контроллер (модуль управления передачей данных) 23А, 23В, 23С образуют систему (блок, подсистему) 20 сбора данных.
Ниже будут описаны предпочтительные варианты настоящего изобретения со ссылками на чертежи. На чертежах одинаковые ссылочные номера соответствуют идентичным или таким же компонентам на разных чертежах. Для лучшего понимания и простоты детальное описание для уже известных функций и структур при этом будет опущено, для того чтобы не затенять предмет обсуждения настоящего изобретения.
На Фиг.1 представлена принципиальная схема для иллюстрации быстрого синхронизируемого сканирования по настоящему изобретению и медленного синхронизируемого сканирования прототипа. Как показано на (А) и (В) на Фиг.1, акселератор генерирует управляемое высокочастотное рентгеновское излучение с частотой в сотни Герц в секунду, при этом каждый импульс формирует один столбец изображения. Таким образом, чем больше импульсов излучения генерируется в единицу времени, тем больше столбцов изображений формируется в данную единицу времени, что, таким образом, повышает скорость формирования изображения при сканировании. Таким образом, появляется возможность повышения скорости формирования изображения за счет повышения частоты, с которой акселератор генерирует сканирующие импульсы.
На Фиг.2 представлены принципиальная схема для иллюстрации детектора с удвоенной площадью по настоящему изобретению и традиционный детектор прототипа. Ширина изображения, сканируемого импульсом излучения объекта в каждый момент времени, определяется площадью детектора. Как показано на (А) и (В) Фиг.2, чем больше площадь детектора, тем больше площадь сканируемого импульсом излучения объекта в каждый момент времени. За счет увеличения площади поперечного сечения детектора можно повысить скорость формирования изображения в процессе сканирования. Таким образом, за счет увеличения площади поперечного сечения детектора можно увеличить размер одиночной развертки изображения и, тем самым, повысить скорость сканирования. То есть за счет использования детектора с удвоенной площадью можно получить удвоенное многостолбцовое изображение для каждого импульса излучения и, тем самым, увеличить частоту и скорость сканирования.
Однако при этом надо улучшить существующую систему обработки данных, основанную на одном детекторе и низкой скоростью сканирования, вне зависимости от повышения скорости сканирования или удвоения площади детектора, так как объем данных, получаемых в единицу времени, возрастет вдвое при увеличении скорости формирования изображения.
В настоящее время коммуникационная (локальная) сеть Ethernet является наиболее популярной последовательной магистральной шиной, которая широко используется в области компьютерных сетей и может обеспечить очень высокий уровень коммуникации. Передача данных, основанная на TCP/IP протоколе, может представлять такие преимущества, как обеспечение высокой надежности данных, наличие широкой технической поддержки и низкой стоимости разработки системы, обучения и эксплуатации. Использование стандартной технологии Ethernet в промышленных процессах реального времени может создать серьезные проблемы надежной передачи больших объемов данных. Для рентгеновской инспекционной системы, требующей высокоскоростного сбора большого объема данных, проектирование системы сбора данных на основе коммуникационной сети Ethernet является весьма подходящим выбором.
На Фиг.3 представлена функциональная блок-схема высокоскоростной подсистемы сбора данных на базе Ethernet согласно варианту настоящего изобретения.
Как показано на Фиг.3, высокоскоростное устройство на базе Ethernet согласно варианту настоящего изобретения включает детектор 10 с множеством датчиков (чувствительных элементов), блок модулей сбора данных 20А, хост-компьютер 30, источник синхронного сигнала 40 и детекторный контроллер 50. Блок модулей сбора данных 20А включает модуль преобразования данных 21А, соединенный с детектором 10, модуль обработки сигналов 22А, соединенный с модулем преобразования данных 21А через параллельную шину В, модуль управления передачей данных 23А, соединенный с модулем обработки сигналов 22А через параллельную шину А. Также модуль управления передачей данных 23А соединен с хост-компьютером 30 через подключение Ethernet.
Аналоговый сигнал, генерируемый детектором 10, является входным сигналом в модуль преобразования данных 21А, который в основном выполняет функцию преобразования аналогового сигнала в цифровой. Согласно варианту настоящего изобретения работа модуля преобразования данных 21А выполняется под управлением модуля обработки сигналов 22А. Модуль преобразования данных 21А, осуществляющий аналого-цифровое преобразование данных от детектора 10 в режиме разделения времени, посылает результирующий цифровой сигнал в модуль обработки сигналов 22А, а затем данные буферизируются в модуле обработки сигналов 22А. При этом детекторный контроллер 50 получает контрольный сигнал от модуля обработки сигналов 22А и затем управляет работой детектора 10 в соответствии с полученным сигналом.
Операция буферизации данных выполняется под управлением модуля обработки сигналов 22А. Так как в системе имеется несколько модулей преобразования данных, то модуль обработки сигналов 22А посылает сигнал адресации в модуль преобразования данных 21 А через адресную шину параллельной шины В. Модуль преобразования данных 21А сравнивает полученный сигнал адресации и выдает подтверждение в случае выбора сигнала. После подтверждения выбора сигнала модуль преобразования данных 21А посылает селекторный сигнал и занимает шину данных параллельной шины В и направляет преобразованные данные по очереди в модуль обработки сигналов 22А.
Основные функции, выполняемые модулем обработки сигналов 22А, следующие: получение различных команд управления и рабочих параметров от хост-компьютера 30, конфигурирование рабочих параметров системы в соответствии с командами хост-компьютера 30 и выполнение соответствующих операций, управление модулем преобразования данных 21А по выполнению аналого-цифрового преобразования, буферизация и передача данных и управление другими модулями для синхронной работы на той же частоте сбора данных, при этом достигается расширение возможностей системы по высокоскоростному сбору данных через расширяемые шины.
Рабочий процесс модуля обработки сигналов 22А включает две части. Вначале выполняется конфигурирование параметров, при котором, перед сбором данных, хост-компьютер 30 поддерживает связь с модулем управления передачей данных 23А через Ethernet, а конфигурация параметров передается в модуль обработки сигналов 22А через параллельную шину А. Вторая часть включает собственно сбор данных, при котором после конфигурирования параметров начинается процесс сбора данных после получения разрешающей команды управления. Процесс заканчивается после получения управляющей команды на окончание. Модуль обработки сигналов 22А выдает на детектор сигнал удержания приема и сигнал выбора адреса, так чтобы детектор 10 мог удерживать сигнал в момент, когда выходной аналоговый сигнал достигает своего пикового значения, а после удержания сигнала модуль обработки сигналов 22А может выбрать сигнал от точно определенного детектора 10 на основе сигнала выбора адреса для передачи его в модуль преобразования данных 21А.
Указанные выше шаги повторяются до тех пор, пока не завершатся управляемые процессы преобразования и буферизации данных. После этого сигнал с готовыми данными передается в модуль управления передачей данных 23А через параллельную шину А с целью передачи данных в хост-компьютер 30 через модуль управления передачей данных 23А.
На Фиг.4 представлена подробная структурная блок-схема модуля управления передачей данных, показанного на Фиг.3. Как показано на Фиг.4, модуль управления передачей данных 23А основан на RISC процессоре 231А компании Ubicom Inc. и поддерживает связь с хост-компьютером 30 по TCP/IP протоколу. Модуль управления передачей данных 23А получает команду, посланную с хост-компьютера 30, и выполняет соответствующие операции. Тем временем модуль управления передачей данных 23А отвечает на сигнал прерывания, посланный от модуля обработки сигналов 22А, и посылает полученные данные в формате протокола TCP/IP на хост-компьютер 30. Формат данных и команда управления задаются заранее на базе TCP/IP протокола. Для обеспечения надежной передачи данных используется механизм устойчивости к погрешностям связи.
RISC процессор 231А принимает IP2022-120 со скоростью до 120 MIPS (миллионов операций в секунду), а сдвоенный модуль связи в микросхеме может иметь программное обеспечение для реализации различных общих интерфейсов связи. Схема конфигурации 242А используется для установки данных по конфигурации модуля управления передачей данных 23А, таких как IP адреса, типы протоколов и т.п. Внешняя цепь ОЗУ 234А используется для расширения пространства памяти системы, таких как стек протоколов и т.п. Модуль управления передачей данных 23А связан с хост-компьютером 30 через Ethernet. Схема интерфейса Ethernet используется для управления и изоляции переданных сигналов. Модуль управления передачей данных 23А связан с модулем обработки сигналов 22А с помощью параллельной шины. Хост-компьютер 30 связан с модулем управления передачей данных 23А в виде архитектуры «клиент-сервер», где хост-компьютер 30 выполняет роль сервера, а модуль управления передачей данных 23А функционирует как «клиент», при этом оба модуля используют строгие TCP/IP протоколы связи для гарантии надежности связи и предотвращения отклонений при передаче данных. Когда питание модуля управления передачей данных 23А включено или он повторно включается, он инициативно посылает запрос на установление соединения на хост-компьютер 30. Если в сети появляются отклонения, то модуль управления передачей данных 23А инициативно отключает хост-компьютер 30 от сети и автоматически обнуляет систему через схему сброса 233А.
На Фиг.5 представлена блок-схема высокоскоростной системы сбора данных, используемой в инспекционной системе железнодорожных вагонов, согласно варианту настоящего изобретения. Как показано на Фиг.5, высокоскоростная система сбора данных, показанная на Фиг.3, может быть расширена с целью удовлетворения требований по высокоскоростному сбору данных. Например, в данной инспекционной системе требования по высокоскоростному сбору данных достигаются за счет расширения трех указанных выше систем сбора данных. Рабочая синхронизация между соответствующими компонентами обеспечивается с помощью модуля обработки сигналов 22А с использованием разрешающего прием сигнала и импульсов синхронизации, прошедших через расширенную шину.
Как показано на Фиг.5, когда модуль обработки сигналов 22А посылает команду выбора одного детектора, он в то же время посылает импульс синхронизации/разрешающий сигнал на модуль обработки сигналов 22В. В этом случае, выходной аналоговый сигнал от детектора 10 передается на вход модуля преобразования данных 21В. Модуль преобразования данных 21В преобразует входящий аналоговый сигнал в цифровую форму и буферизует данные в ОЗУ модуля преобразования данных 21В. Модуль управления передачей данных 23В устанавливает связь с хост-компьютером 30 через модуль узла данных (узел данных) 24А, после чего работа модуля управления передачей данных 23В осуществляется под управлением хост-компьютера 30, а модуль управления передачей данных 23В передает полученные цифровые данные на хост-компьютер в реальном времени после завершения одного преобразования приема.
Таким же образом, когда модуль обработки сигналов 22А посылает команду выбора одного детектора, он в то же время посылает импульс синхронизации/разрешающий сигнал на модуль обработки сигналов 22С. В этом случае, выходной аналоговый сигнал от детектора 10 передается на вход модуля преобразования данных 21С. Модуль преобразования данных 21С преобразует входящий аналоговый сигнал в цифровую форму и буферизует данные в ОЗУ модуля преобразования данных 21С. Модуль управления передачей данных 23С устанавливает связь с хост-компьютером 30, после чего работа модуля управления передачей данных 23С осуществляется под управлением хост-компьютера 30, а модуль управления передачей данных 23С передает полученные цифровые данные на хост-компьютер 30 в реальном времени после завершения одного преобразования приема.
Согласно варианту настоящего изобретения число таких блоков сбора данных может быть расширено по требованию. Блоки сбора данных имеют очень хорошую совместимость и применимость для высокоскоростного сбора большого объема данных. Это дает возможность быстро достичь необходимых требований к системе за счет увеличения числа блоков сбора данных.
Предшествующее описание относится только к предпочтительным вариантам настоящего изобретения. Таким образом, для специалиста в данной области знаний будет очевидно, что любое изменение или частичная замена в рамках объема настоящего изобретения должны быть связаны с объемом, определенным в пунктах формулы настоящего изобретения. Соответственно, объем защиты настоящего изобретения определяется объемом защиты пунктов формулы.
Подписи на чертежах Фиг.3
From the preceding stage of signal processing module or synchronous signal source - От предшествующего этапа модуля обработки сигнала или источника синхронного сигнала
Enabling Command/Synchronous Pulse - разрешающая команда/синхронный импульс
10 Detector - Детектор
21A Data Converting Module - Модуль преобразования данных
Parallel Bus В - параллельная шина В
Extended Bus Input - расширенный входной сигнал шины
Extended Bus Output - расширенный выходной сигнал шины
22А Signal Processing Module - Модуль обработки сигналов 22А
Parallel Bus A - параллельная шина А
50 Detector Controller - контроллер детекторный
23А Communication Control Module - Модуль управления передачей данных 23А
30 Host Computer - Хост-компьютер
То Next Stage Of Signal Processing Module - К следующему этапу модуля обработки сигнала.
Фиг.4
232А Configuration Circuit - Схема конфигурации
233А Reset Circuit - Схема обнуления
234А External RAM Circuit - Внешняя цепь ОЗУ
235А Ethernet Interface Circuit - Схема интерфейса Ethernet
22А - Signal Processing Module - Модуль обработки сигналов 22А
30 Host Computer - Хост-компьютер
Фиг.5
30 Host Computer - Хост-компьютер
24А Data Hub Module - Узловой модуль данных
23А, В, С Communication Control Module - Модуль управления передачей данных
Parallel Bus A - параллельная шина А
40 Synchronous Signal Source - Источник синхронного сигнала
Synchronous Pulse - Синхронный импульс
22А, B, С - Signal Processing Module - Модуль обработки сигналов
Parallel Bus В - параллельная шина В
Control Signal - Сигнал управления
Analog Signal - Аналоговый сигнал
50 Detector Controller - Контроллер детекторный.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНСПЕКТИРОВАНИЯ НАРКОТИКОВ, СПРЯТАННЫХ В ЖИДКИХ ПРЕДМЕТАХ | 2008 |
|
RU2371705C1 |
| Багажная тележка | 2019 |
|
RU2713955C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЯГОВОГО УСИЛИЯ ДЛЯ НЕСКОЛЬКИХ ЭЛЕКТРОСЕКЦИЙ | 2015 |
|
RU2641558C1 |
| СИСТЕМА И СПОСОБ ДОСМОТРА В ЦЕЛЯХ БЕЗОПАСНОСТИ | 2019 |
|
RU2720445C1 |
| Малогабаритный высокопроизводительный вычислительный модуль на базе многопроцессорной Системы-на-Кристалле | 2021 |
|
RU2778213C1 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И НОСИТЕЛЬ ДАННЫХ | 2018 |
|
RU2709437C1 |
| СПОСОБ И УСТАНОВКА РАДИАЦИОННОГО КОНТРОЛЯ ЖИДКИХ ОБЪЕКТОВ | 2006 |
|
RU2372610C1 |
| МЕХАНИЗМ СИГНАЛИЗАЦИИ НАЗНАЧЕНИЯ ВРЕМЕННЫХ РЕСУРСОВ ДЛЯ ПЕРЕДАЧИ СООБЩЕНИЯ MSG3 | 2019 |
|
RU2741567C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ КОЛИЧЕСТВА КОНТЕКСТНЫХ МОДЕЛЕЙ ДЛЯ ЭНТРОПИЙНОГО КОДИРОВАНИЯ ФЛАГА ЗНАЧИМОСТИ КОЭФФИЦИЕНТА ПРЕОБРАЗОВАНИЯ | 2020 |
|
RU2783341C1 |
| СИСТЕМЫ СПИРАЛЬНОЙ КТ И СПОСОБЫ РЕКОНСТРУКЦИИ | 2015 |
|
RU2595312C1 |
Изобретение раскрывает систему формирования изображения излучения, включающую: акселератор для генерирования лучей, проходящих через инспектируемые объекты, и синхронного сигнала; детектор с множеством блоков обнаружения, адаптированных для обнаружения лучей; процессор сигналов для генерирования сигнала выбора в зависимости от синхронного сигнала, таким образом, чтобы выбрать детектор для обнаружения лучей; преобразователь данных для преобразования обнаруженного детектором сигнала в цифровой вид, а затем буферизацию цифровых данных в процессоре обработки сигналов; и связной контроллер, подключенный к процессору обработки изображений, приспособленный для передачи цифровых данных, буферизированных в процессоре обработки сигналов в процессор обработки изображений. Технический результат - система позволяет осуществлять высокоскоростной и стабильный сбор и преобразование данных, а также точную и надежную передачу данных в случае, если объем данных значительный. 3 з.п. ф-лы, 5 ил.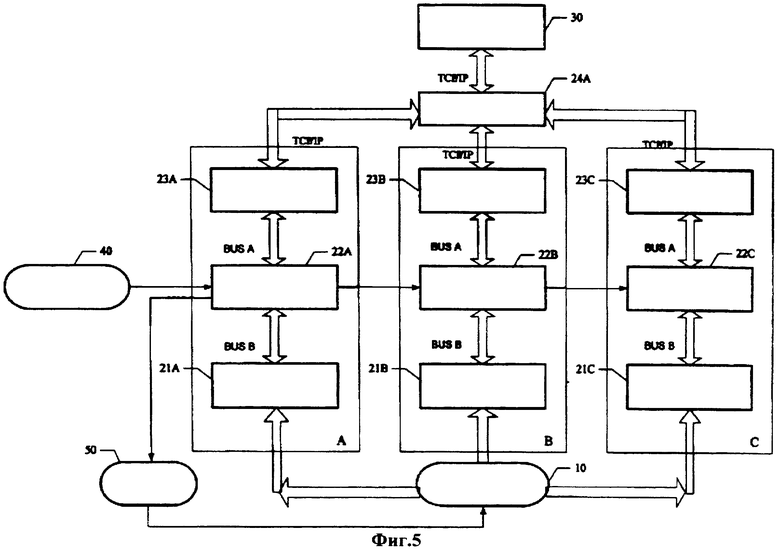
1. Система формирования изображения излучения, содержащая: акселератор (ускоритель) 100 для генерирования лучей, проходящих через инспектируемые объекты, и синхронного сигнала; детектор 10, включающий как минимум один датчик (чувствительный элемент), для обнаружения лучей; систему сбора данных - блоки 20А, 20В и 20С, включающую: подключенный к детектору 10, содержавшему датчики (чувствительные элементы), модуль преобразования данных, включающий преобразователи данных 21А, 21В и 21С, для преобразования обнаруженного детектором сигнала в цифровой вид, а затем буферизацию цифровых данных в модуле обработки сигналов, включающем сигнальные процессоры 22А, 22В и 22С, для генерирования сигнала выбора в зависимости от синхронного сигнала, таким образом, чтобы выбрать один датчик детектора для обнаружения лучей, и модуль управления передачей данных, включающий связные контроллеры 23А, 23В и 23С, подключенный к процессору обработки изображений (хост-компьютеру) 30 для выработки различных команд управления и рабочих параметров через модуль узла данных 24А, приспособленный для передачи в него цифровых данных, буферизированных в модуле обработки сигналов,
источник синхронного сигнала 40, подключенный к сигнальному процессору 22А и связанный через него по расширенной шине с сигнальными процессорами 22В и 22С, детекторный контроллер 50, подключенный к выходу сигнального процессора 22А модуля обработки сигналов для получения от него контрольного сигнала и осуществления управления работой детектора 10 в соответствии с полученным сигналом,
причем число датчиков (чувствительных элементов), составляющих детектор 10, может быть увеличено;
сигнальные процессоры 22А, 22В и 22С модуля обработки сигналов выполнены с возможностью управления таким образом, чтобы все датчики (чувствительные элементы) детектора работали синхронно на основе одной и той же частоты сбора данных и выполняли расширенные функции быстродействующей системы сбора данных через параллельные шины BUS A и BUS В,
а синхронизация между соответствующими элементами обеспечена модулем обработки сигналов 22А, использующим сигнал разрешения сбора и импульсы синхронизации из источника синхронного сигнала 40, проходящие через расширенную шину для управления модулями обработки сигналов 22В и 22С синхронно с детекторным контроллером 50.
2. Система по п.1, отличающаяся тем, что преобразователь данных и сигнальный процессор соединены через параллельные шины.
3. Система по п.1, отличающаяся тем, что сигнальный процессор и связной контроллер соединены через параллельные шины.
4. Система по п.1, отличающаяся тем, что скорость инспектируемого объекта превышает 4 км/ч.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОБЪЕКТА В РАССЕЯННОМ И/ИЛИ ПРОШЕДШЕМ ИЗЛУЧЕНИИ | 2004 |
|
RU2256169C1 |
| СПОСОБ ИМПУЛЬСНОЙ МИКРОДОЗОВОЙ РЕНТГЕНОВСКОЙ ДИАГНОСТИКИ | 2004 |
|
RU2273844C1 |
| Заклепка | 1948 |
|
SU75691A1 |
| US 5376795 A, 27.12.1994. | |||

