Область техники.
Предлагаемое изобретение относится к средствам передвижения в водной среде, методике проведения подводно-технических работ и океанологических исследований с борта обитаемого подводного аппарата.
Уровень техники.
Многообразие задач при проведении подводно-технических и научно-исследовательских работ с борта обитаемого подводного аппарата (ОПА) требуют большого количества технологического оборудования и измерительных приборов.
Известны работы по созданию манипуляторов, буровых установок, проботборников грунта и придонной воды, телевизионных камер, осветительной техники, океанологических измерительных приборов и другого оборудования обитаемых подводных аппаратов [1, 2, 3].
Имеющиеся механизмы, приборы и устройства позволяют выполнять разнообразные виды работ при проведении глубоководных исследований с использованием обитаемых подводных аппаратов. При этом необходимо учесть, что для выполнения каждого вида подводно-технических или научно-исследовательских работ необходимо в заводских условиях производить монтаж приборов и оборудования манипуляционно-технологического комплекса. Одновременная установка на ОПА большого количества приборов и оборудования, с целью расширения функциональных возможностей манипуляционно-технологического комплекса, не представляется технически возможной [4].
В качестве прототипа для решения поставленной задачи принят Патент №2314229 от 10 января 2008 года на «Способ комплексного освещения внешней (подводной) обстановки обитаемых подводных аппаратов» [5].
Сущность изобретения.
В предлагаемом изобретении решается задача расширения функциональных возможностей манипуляционно-технологического комплекса обитаемого подводного аппарата (ОПА) в экспедиционных условиях, сокращения времени и повышения безопасности при выполнении разнообразных подводно-технических и научно-исследовательских работ.
На основе анализа комплекса научно-исследовательских и подводно-технических работ, выполняемых обитаемыми подводными аппаратами, составлен и приведен в таблице ориентировочный перечень оборудования и океанологических измерительных приборов, необходимых для их выполнения [4].
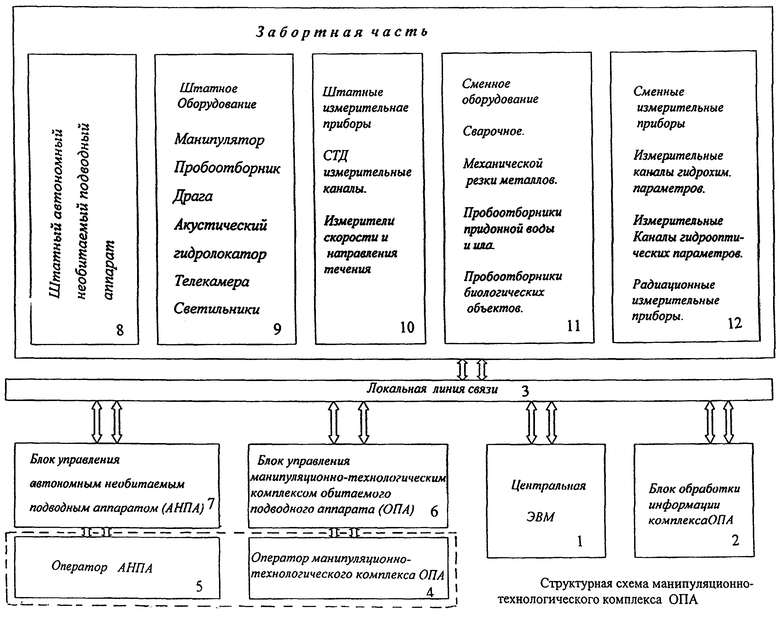
Для реализации предложенного изобретения разработана структурная схема комплекса многофункционального манипуляционно-технологического оборудования и океанологических измерительных приборов обитаемых подводных аппаратов, приведенная на чертеже. Обитаемые подводные аппараты рассматриваются как глубоководные подвижные платформы, обладающие необходимыми мореходными качествами, мощной энергетической установкой и большой автономностью.
Структурная схема с учетом приведенных в таблице материалов включает в себя: центральную вычислительную машину (1), блок обработки информации устройств манипуляционно-технологического комплекса, автономного необитаемого подводного аппарата (АНПА) и океанологических измерительных приборов, входящих в оборудование обитаемого подводного аппарата (2), локальной линии связи (3), центрального пульта управления, включающего в себя рабочее место оператора манипуляционно-технологического комплекса (4) и рабочее место оператора автономного необитаемого подводного аппарата (5), блок управления манипуляционно-технологическим комплексом (6) и блок управления автономным необитаемым подводным аппаратом (7). Забортная часть структурной схемы комплекса включает в себя: автономный необитаемый подводный аппарат (8); штатное оборудование обитаемого подводного аппарата: манипулятор, пробоотборник, драгу, телекамеру, фотокамеру, светильники и акустический гидролокатор (9); штатные измерительные приборы обитаемого подводного аппарата: измерительные каналы температуры, электрической проводимости и гидростатического давления забортной воды, измерительные каналы скорости и направления вектора скорости течения (10); сменное оборудование: сварочное, механической резки металлов, монтажный инструмент, пробоотборник придонной воды и ила, пробоотборник биологических объектов (11); сменные измерительные приборы гидрохимических, гидрооптических и радиационных параметров (12).
Приборы и оборудование, приведенные в таблице, изготавливаются в соответствии с требованиями стандартизации, т.е. они имеют унифицированные посадочные места, унифицированные разъемные механические и электрические соединения и унифицированную разводку электрических разъемных соединений.
При этом основой многофункционального манипуляционно-технологического комплекса обитаемого подводного аппарата является штатный комплект приборов и оборудования, который используется практически при проведении всех работ. Вариант штатного оборудования обитаемого подводного аппарата приведен на чертеже под номерами (8, 9, 10).
Дополнительно многофункциональный манипуляционный комплекс может быть укомплектован сменным оборудованием: сварочным, механической резки металлов, монтажным инструментом, пробоотборниками придонной воды и ила, пробоотборниками биологических объектов (11).
В состав сменного оборудования входят измерительные приборы: гидрохимических и гидрооптических параметров забортной воды, радиационные измерительные приборы (12). Сменные приборы и оборудование манипуляционно-технологического комплекса выполнены с учетом требований по стандартизации.
Монтаж сменного оборудования и сменных измерительных приборов, предназначенных для решения конкретных исследовательских и подводно-технических задач, осуществляется в экспедиционных условиях.
Возможность осуществления.
Оснащение обитаемых подводных аппаратов многофункциональным манипуляционно-технологическим оборудованием в соответствии с разработанной структурной схемой комплекса многофункционального манипуляционно-технологического оборудования и океанологических измерительных приборов обитаемых подводных аппаратов позволяет выполнять широкий комплекс научно-исследовательских и подводно-технических работ, выполняемых обитаемыми подводными аппаратами.
Материалы таблицы, в которой приведен перечень задач, решаемых с использованием обитаемых подводных аппаратов, свидетельствуют о том, что приборы и оборудование, которыми оснащается подводный аппарат, задействуются при решении отдельных задач частично и устанавливаются на ОПА перед выполнением определенных задач или класса задач.
Учитывая, что приборы и оборудование манипуляционного комплекса выполнены с учетом требований по стандартизации, формируем рабочую схему при установке сменного рабочего оборудования с унифицированной системой управления, используя обитаемый подводный аппарат как единую базовую транспортную систему.
При этом в качестве штатного оборудования многофункционального манипуляционно-технологического комплекса ОПА входят: автономный необитаемый подводный аппарат (8); штатное оборудование обитаемого подводного аппарата: манипулятор, пробоотборник, драга, телекамера, фотокамера, светильники и акустический гидролокатор (9); штатные измерительные приборы обитаемого подводного аппарата: измерительные каналы температуры, электрической проводимости и гидростатического давления забортной воды, измерительные каналы скорости и направления вектора скорости течения (10). Дополнительно многофункциональный манипуляционный комплекс может быть укомплектован сменным оборудованием: сварочным, механической резки металлов, монтажным инструментом, пробоотборниками придонной воды и ила, пробоотборниками биологических объектов (11). В состав сменного оборудования входят измерительные приборы гидрохимических и гидрооптических параметров забортной воды, радиационные измерительные приборы (12).
Методика проведения подводно-технических работ обитаемым подводным аппаратом, оснащенным манипуляционно-техническим комплексом, заключается в том, что в районе нахождения объекта работ оператор обитаемого подводного аппарата выполняет рекогносцировочное погружение на аппарате, оснащенном штатным оборудованием и штатными измерительными приборами, для детального определения характера и объема работ, которые необходимо выполнить на данном объекте. Одновременно оператор ОПА определяет состав приборов и оборудования манипуляционно-технологического комплекса, который необходим для выполнения данных работ.
Обитаемый подводный аппарат поднимается на борт судна-носителя ОПА, где непосредственно в экспедиционных условиях производится установка необходимых приборов и оборудования манипуляционно-технологического комплекса, позволяющих выполнить полностью или частично объем подводно-технических работ на объекте. При этом может быть заменена часть штатного оборудования и установлено сменное оборудование. Операция по замене приборов и оборудования манипуляционно-технологического комплекса может быть проведена неоднократно по мере необходимости для выполнения всего объема работ на объекте. Все работы по изменению состава манипуляционно-технологического комплекса ОПА выполняются в экспедиционных условиях, что позволяет значительно сократить экспедиционное время и стоимость выполнения работ на объекте
Электронные блоки системы имеют единые алгоритмы обработки информации и способны работать на ОПА в любом их сочетании.
Перечень задач, решаемых с обитаемых подводных аппаратов, и используемое при этом оборудование, механизмы и приборы.

Источники информации, принятые во внимание при составлении заявки
1. Хэкмен Д., Коди Д. Подводный инструмент: Пер. с англ. - Л.: - Судостроение, 1985. - 128 с.
2. Ракитин И.Я. Подводные робототехнические системы. - М.: 2002, 191 с.
3. Морские технологии Под общей редакцией академика М.Д.Агеева, Вып.3, Подводные роботы и их системы, Дальнаука, Владивосток, 2000.
4. Войтов Д.В. Подводные обитаемые аппараты. - М.: ООО «Издательство АСТ»: ООО «Издательство Астрель», 2002. - 303 с, 16 л. ил.
5. Смирнов Г.В., Беленький В.Н. Патент на изобретение №2314229 от 10 января 2008 г. Способ комплексного освещения внешней (подводной) обстановки обитаемых подводных аппаратов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКСНОГО ОСВЕЩЕНИЯ ВНЕШНЕЙ (ПОДВОДНОЙ) ОБСТАНОВКИ ОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2005 |
|
RU2314229C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ ОБИТАЕМОГО ПОДВОДНОГО АППАРАТА НАД ОБЪЕКТОМ РАБОТ | 2008 |
|
RU2394720C2 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| МНОГОЦЕЛЕВАЯ ПОДВОДНАЯ СТАНЦИЯ (МПС) | 2010 |
|
RU2436705C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| СПОСОБ ПОДВОДНОГО ПУСКА НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА С ПЛАВУЧЕГО ОБЪЕКТА И ПУСКОВОЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2654888C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
Изобретение относится к области подводных аппаратов. Согласно способу производства подводных работ выполняют рекогносцировочное погружение на обитаемом подводном аппарате, оснащенном штатным оборудованием и штатными измерительными приборами для детального определения характера и объема работ. Непосредственно в экспедиционных условиях производят установку на обитаемый подводный аппарат необходимых приборов и оборудования, позволяющих выполнить подводно-технические работы на объекте. Комплекс для осуществления подводных работ содержит размещенные на борту обитаемого подводного аппарата набор исследовательских приборов и механических инструментов, систему гидроакустической навигации, системы видео и лазерного наблюдения, систему связи с судном-носителем. Все приборы и оборудование имеют унифицированные посадочные места, унифицированные разъемные механические и электрические соединения и способны работать на аппарате в любом их сочетании, Достигается расширение функциональных возможностей обитаемого подводного аппарата и сокращение времени, затрачиваемого на смену оборудования. 2 н.п. ф-лы, 1 ил., 1 табл.
1. Способ производства подводных работ, заключающийся в неоднократном погружении обитаемого подводного аппарата (ОПА) с набором исследовательских приборов и механических инструментов, изготовленных в соответствии с требованиями по стандартизации, и производстве работ на глубине, отличающийся тем, что в районе нахождения объекта работ оператор обитаемого подводного аппарата выполняет рекогносцировочное погружение на аппарате, оснащенном штатным оборудованием и штатными измерительными приборами, для детального определения характера и объема работ, которые необходимо выполнить на данном объекте, определяет состав штатных и сменных приборов и оборудования манипуляционно-технологического комплекса, который необходим для выполнения данных работ, обитаемый подводный аппарат поднимается на борт судна-носителя ОПА, где непосредственно в экспедиционных условиях производится установка на ОПА необходимых приборов и оборудования манипуляционно-технологического комплекса, позволяющих выполнить полностью или частично объем подводно-технических работ на объекте, операция по замене состава приборов и оборудования манипуляционно-технологического комплекса может быть проведена неоднократно на борту судна-носителя по мере необходимости для выполнения планируемых работ на объекте в полном объеме.
2. Комплекс для осуществления подводных работ, содержащий набор исследовательских приборов и механических инструментов на борту обитаемого подводного аппарата (ОПА), систему гидроакустической навигации, системы видео и лазерного наблюдения, устройство связи с судном-носителем ОПА, отличающийся тем, что все приборы и оборудование изготовлены в соответствии с требованиями стандартизации, т.е. они имеют унифицированные посадочные места, унифицированные разъемные механические и электрические соединения и унифицированную разводку электрических разъемных соединений, электронные блоки системы имеют единые алгоритмы обработки информации и способны работать на ОПА в любом их сочетании.
| Статья «Обитаемые подводные аппараты», 1987-2005 г | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

