Изобретение относится к подводным техническим средствам для исследования и освоения мирового океана, а именно к малогабаритным функциональным автономным необитаемым подводным аппаратам (АНПА), предназначенным для выполнения широкого круга исследовательских, поисковых и подводно-технических работ на шельфе. К наиболее важным показателям АНПА относятся их автономность (дальность хода), состав и характеристики полезной нагрузки, а также масса и габаритные характеристики. Поэтому, при создании АНПА особое внимание уделяют именно этим техническим характеристикам. Существенными для АНПА является также технологичность конструкции и удобство технического обслуживания.
Известен малогабаритный АНПА «REMUS» (Г.Ю. Илларионов, К.С. Сиденко, Л.Ю. Бочаров, Угроза из глубины: 21 век. - Хабаровск: КГУП «Хабаровская краевая типография», - 2011. 304 с., ил. с. 158-162], где полностью герметичный корпус аппарата состоит из носового, среднего и кормового отсеков. Средний отсек состоит из нескольких модулей: модуля навигационной гидроакустической системы, модуля двухчастотного гидролокатора бокового обзора, модуля доплеровского лага, модуля доплеровского акустического профилографа, модуля датчиков крена и дифферента, модуля эхолокационной системы, модуля бортового компьютера и автопилота, а также модуля автономного источника электроэнергии. Датчик CTD (удельная проводимость, температура и глубина) установлен снаружи корпуса АНПА. В носовом отсеке расположены обтекатель из диэлектрика и контакты для зарядного устройства донного причального сооружения, обеспечивающего подачу электроэнергии на АНПА для перезарядки его аккумуляторной батареи. В кормовом отсеке находятся двигательно-рулевая система. Отсеки АНПА «REMUS» и модули в них скреплены между собой винтами. Каждый модуль среднего отсека имеет прочный цилиндрический корпус с внутренним каркасом, предназначенным для размещения в нем соответствующей аппаратуры.
К недостаткам данного аппарата следует отнести затрудненность быстрой замены функциональных модулей внутри прочных корпусов АНПА из-за множества винтовых соединений. Как правило, новая полезная нагрузка аппарата устанавливается в носовой отсек и изменяет его наружные обводы, что сильно ухудшает гидродинамические свойства аппарата (снижает скорость и ухудшает маневренность).
Такое конструктивное выполнение малогабаритного АНПА «REMUS» снижает его технологичность и затрудняет выполнение всех видов технического обслуживания и профилактического ремонта обслуживаемым персоналом.
Известен также малогабаритный многофункциональный автономный необитаемый подводный аппарат «Платформа» (А.В. Воронцов, Г.Ю. Илларионов, Д.Н. Михайлов, малогабаритный многофункциональный автономный необитаемый подводный аппарат «Платформа» // Седьмая всероссийская научно-техническая конференция «Технические проблемы освоения мирового океана» 2-6 октября 2017 г. Материалы конференции, Владивосток 2017, с. 70-73). Малогабаритный многофункциональный автономный необитаемый подводный аппарат «Платформа» содержит корпусную несущую конструкцию, которая выполнена из отсеков, в том числе из кормового отсека. Отсеки последовательно и жестко соединены между собой с возможностью их разъема в направлении продольной оси подводного аппарата. Один из отсеков выделен под размещение в нем сменной полезной нагрузки и выполнен проницаемым для забортной воды. На кормовом отсеке установлены два вертикальных и два горизонтальных стабилизатора. Движительно-рулевой комплекс состоит из четырех маршевых движителей и вертикального подруливающего движителя. Маршевые движители установлены в хвостовой части кормового отсека на стабилизаторах, а вертикальный подруливающий движитель размещен в одном из отсеков. В состав аппарата входят базовые системы, обеспечивающие функционирование подводного аппарата:
- система программного управления и навигации,
- система энергообеспечения на основе модуля аккумуляторной батареи,
- гидроакустическая система связи,
- система радиосвязи,
- блоки плавучести, обеспечивающие положительную плавучесть для подводного аппарата.
Известный АНПА является наиболее близким по технической сущности к заявляемому устройству и принят в качестве прототипа.
Такое конструктивное выполнение малогабаритного АНПА «Платформа» снижает его технологичность и затрудняет выполнение всех видов технического обслуживания персоналом, что следует отнести к его недостатками.
Кроме того, сужены функциональные возможности АНПА, снижена возможность его модернизации и затруднено размещение на нем дополнительной сменной полезной нагрузки, что усложняет его конструкцию и, следовательно, увеличивает его стоимость.
В целом перечисленные недостатки упомянутых аналогов и прототипа не обеспечивают необходимых функциональных и эксплуатационных свойств малогабаритного многофункционального автономного необитаемого подводного аппарата - носителя сменной полезной нагрузки.
В основу предполагаемого изобретения поставлена задача, устранить указанные недостатки и повысить технологичность как АНПА в целом, так и всех видов технического обслуживания и профилактического ремонта, обеспечить расширение его функциональных возможностей и возможностей его модернизации.
Поставленная задача решается тем, что в малогабаритном многофункциональном автономном необитаемом подводном аппарате - носителе сменной полезной нагрузки, содержащем корпусную несущую конструкцию, которая выполнена из отсеков, в том числе из кормового отсека и прилегающего к нему герметичного отсека, последовательно и жестко соединенных между собой с возможностью их разъема в направлении продольной оси подводного аппарата, причем один из отсеков выделен под размещение в нем сменной полезной нагрузки и выполнен проницаемым для забортной воды, а на кормовом отсеке установлены два вертикальных и два горизонтальных стабилизатора, движительно-рулевой комплекс из четырех маршевых движителей и вертикального подруливающего движителя, причем маршевые движители установлены в хвостовой части кормового отсека на стабилизаторах, а вертикальный подруливающий движитель размещен в одном из отсеков, базовые системы, обеспечивающие функционирование подводного аппарата, в составе системы программного управления и навигации, системы энергообеспечения на основе модуля аккумуляторной батареи, гидроакустической системы связи и системы радиосвязи, блоки плавучести, обеспечивающие положительную плавучесть для подводного аппарата, кормовой отсек выполнен герметичным, цилиндрической формы, а в нем размещен модуль аккумуляторной батареи, при этом с хвостовой стороны кормовой отсек снабжен быстросъемной герметичной крышкой, между кормовым отсеком и прилегающим к нему герметичным отсеком дополнительно жестко установлен промежуточный герметичный отсек, наружный диаметр которого выполнен меньше наружных диаметров соединяемых им отсеков, конструктивные элементы базовых систем, обеспечивающих функционирование подводного аппарата и включающих автопилот, размещены в герметичном отсеке, прилегающим к промежуточному герметичному отсеку меньшего наружного диаметра, а сам аппарат выполнен из неизменяемой базовой части, включающей движительно-рулевой комплекс, модуль аккумуляторной батареи, базовые системы, обеспечивающие его функционирование и, конструктивно и функционально связанной с ней, части для размещения сменной полезной нагрузки, в состав которой включены как проницаемый для забортной воды, так и герметичный отсеки, при этом герметичный отсек сменной полезной нагрузки с одной стороны жестко соединен с герметичным отсеком, в котором размещены электронные блоки базовых систем, а с другой стороны отделен прочной герметичной крышкой от проницаемого для забортной воды отсека сменной полезной нагрузки.
Поставленная задача достигается также тем, что в подводном аппарате - носителе сменной нагрузки вертикальный подруливающий движитель установлен в проницаемом для забортной воды отсеке сменной полезной нагрузки.
В заявленном подводном аппарате общими существенными признаками для него и для его прототипа являются:
- корпусная несущая конструкция, которая выполнена из отсеков, в том числе из кормового отсека и прилегающего к нему герметичного отсека, последовательно и жестко соединенных между собой с возможностью их разъема в направлении продольной оси подводного аппарата;
- один из отсеков выделен под размещение в нем сменной полезной нагрузки и выполнен проницаемым для забортной воды;
- на кормовом отсеке установлены два вертикальных и два горизонтальных стабилизатора;
- движительно-рулевой комплекс из четырех маршевых движителей и вертикального подруливающего движителя
- причем маршевые движители установлены в хвостовой части кормового отсека на стабилизаторах;
- вертикальный подруливающий движитель размещен в одном из отсеков;
- базовые системы, обеспечивающие функционирование подводного аппарата, в составе системы программного управления и навигации системы энергообеспечения на основе модуля аккумуляторной батареи, гидроакустической системы связи и системы радиосвязи,
- блоки плавучести, обеспечивающие положительную плавучесть для подводного аппарата.
Сопоставительный анализ существенных признаков заявленного подводного аппарата и его прототипа показывает, что первый в отличие от прототипа имеет следующие существенные отличительные признаки:
- кормовой отсек выполнен герметичным, цилиндрической формы и в нем размещен модуль аккумуляторной батареи, при этом с хвостовой стороны кормовой отсек снабжен быстросъемной герметичной крышкой;
- между кормовым отсеком и прилегающим к нему герметичным отсеком дополнительно жестко установлен промежуточный герметичный отсек, наружный диаметр которого выполнен меньше наружных диаметров соединяемых им отсеков;
- конструктивные элементы базовых систем, обеспечивающих функционирование подводного аппарата и включающих автопилот, размещены в герметичном отсеке, прилегающим к промежуточному герметичному отсеку меньшего наружного диаметра;
- сам аппарат выполнен из неизменяемой базовой части, включающей движительно-рулевой комплекс, модуль аккумуляторной батареи, базовые системы, обеспечивающие его функционирование и, конструктивно и функционально связанной с ней, части для размещения сменной полезной нагрузки, в состав которой включены как проницаемый для забортной воды, так и герметичный отсеки;
- герметичный отсек сменной полезной нагрузки с одной стороны жестко соединен с герметичным отсеком, в котором размещены электронные блоки базовых систем, а с другой стороны отделен прочной крышкой от проницаемого для забортной воды отсека сменной полезной нагрузки.
Отличительные признаки предлагаемого решения выполняют следующие функциональные задачи для достижения требуемого технического результата.
Особенность компоновки кормовой части АНПА заключается в установке на кормовом отсеке маршевых движителей, а в самом кормовом отсеке аккумуляторной батареи. Тем самым минимизирована длина силовых кабельных линий, а также силовая часть (создающая помехи) локализована удаленно от электроники аппарата.
Также кормовой отсек выполнен таким образом, что для снятия модуля аккумуляторной батареи (АКБ) достаточно открутить кормовую крышку корпуса отсека и выдвинуть модуль АКБ. Этим самым достигается простота выполнения операции и сокращается время обслуживания (замены) модуля АКБ.
Установка отсека с меньшим диаметром позволила получить место для установки забортных систем (датчиков, гермовводов и пр.) при этом сохранив единую жесткую конструкцию без дополнительных прочных крышек, включающий кормовой отсек, промежуточный отсек и отсек для электронных элементов базовых систем (автопилот). Это позволяет обеспечивать соединение базовых систем с модулем АКБ без дополнительных герметичных узлов (громоздких, сложных в изготовлении). Стало возможным осуществить установку в промежутке между диаметрами гермовводов внешнего оборудования, не нарушая гидродинамических свойств всего аппарата (выступающие части спрятаны под обшивкой).
Герметичный отсек сменной полезной нагрузки соединен с герметичным отсеком для электронных элементов базовых систем, образуя тем самым единый сухой (герметичный) объем. При такой компоновке упрощается организация энергоинформационного обмена между сменной полезной нагрузкой и базовыми системами: отсутствуют дополнительные герметичные крышки и, соответственно, не требуются гермовводы. При этом соединение блоков сменной полезной нагрузки и базовых систем выполнены таким образом, что обслуживание этих блоков (добавление, удаление, ремонт элементов) осуществляется с различных сторон: базовые системы с кормовой стороны, полезная нагрузка с носовой стороны аппарата. Тем самым при выполнении работ со сменной полезной нагрузкой не происходит воздействия (механического) на базовые системы, что исключает риск их случайного повреждения.
Таким образом, функциональные возможности малогабаритного многофункционального автономного необитаемого подводного аппарата - носителя сменной полезной нагрузки расширяются за счет конструктивных особенностей, которые позволяют менять сменную полезную нагрузку под выполнение различных конкретных задач. Кроме того, повышается технологичность АНПА и упрощается выполнение всех видов технического обслуживания и профилактического ремонта обслуживаемым персоналом.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Указанные существенные признаки, отличающие заявленный подводный аппарат от прототипа, в совокупности с признаками общими для него и прототипа, обеспечивают достижение заявленного технического результата во всех случаях, на которые распространяется объем правовой охраны.
Сущность изобретения поясняется чертежами, где:
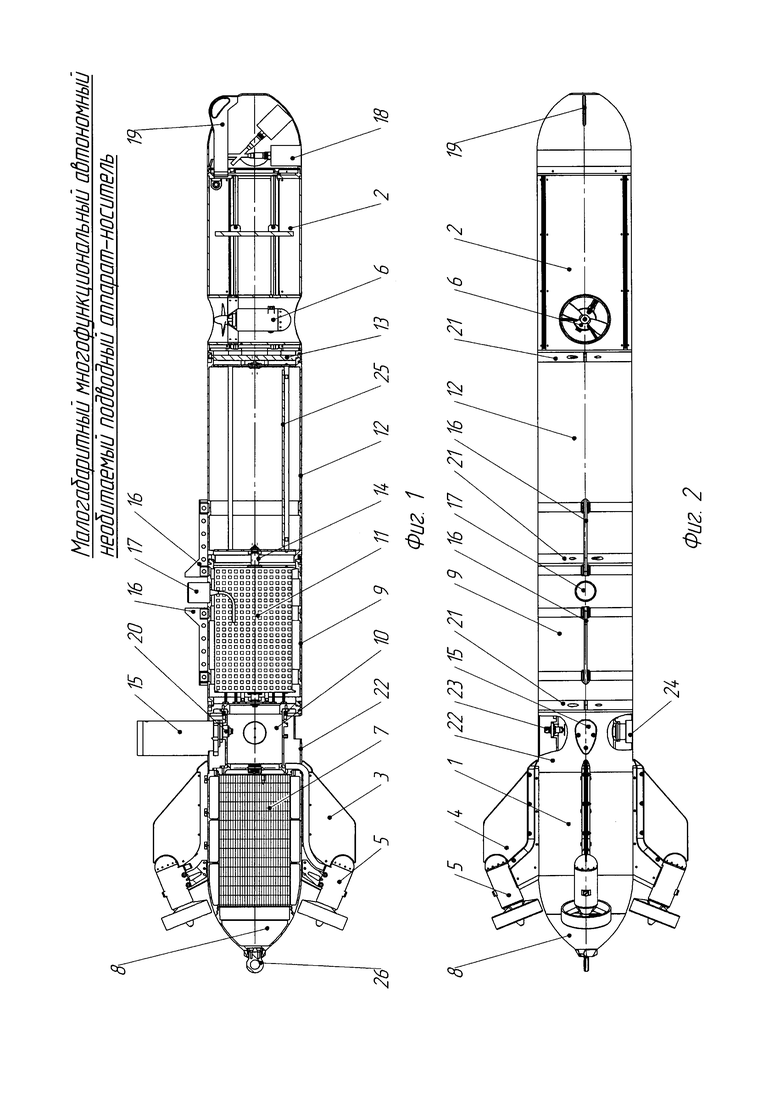
- на фиг. 1 представлен продольный разрез малогабаритного многофункционального автономного необитаемого подводного аппарата- носителя сменной полезной нагрузки;
- на фиг. 2 представлен общий вид подводного аппарата - вид сверху.
Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки содержит корпусную несущую конструкцию, которая выполнена из отсеков, в том числе из кормового отсека 1 и прилегающего к нему герметичного отсека, последовательно и жестко соединенных между собой с возможностью их разъема в направлении продольной оси подводного аппарата. Один из отсеков 2 выделен под размещение в нем сменной полезной нагрузки и выполнен проницаемым для забортной воды. На кормовом отсеке 1 установлены два вертикальных стабилизатора 3 и два горизонтальных стабилизатора 4. Движительно-рулевой комплекс состоит из четырех маршевых движителей 5 и вертикального подруливающего движителя 6. Маршевые движители 5 установлены в хвостовой части кормового отсека 1 на стабилизаторах, а вертикальный подруливающий движитель 6 размещен в отсеке 2. Базовые системы, обеспечивающие функционирование подводного аппарата, представлены в составе системы программного управления и навигации, системы энергообеспечения на основе модуля 7 аккумуляторной батареи, гидроакустической системы связи и системы радиосвязи (электронные блоки систем на чертежах не представлены). Блоки плавучести, обеспечивающие положительную плавучесть для подводного аппарата, размещаются в отсеках (на чертежах не показаны).
Кормовой отсек 1 выполнен герметичным, цилиндрической формы, а в нем размещен модуль 7 аккумуляторной батареи, при этом с хвостовой стороны кормовой отсек 1 снабжен быстросъемной герметичной крышкой 8. Между кормовым отсеком 1 и прилегающим к нему герметичным отсеком 9 дополнительно жестко установлен промежуточный герметичный отсек 10, наружный диаметр которого выполнен меньше наружных диаметров соединяемых им отсеков 1 и 9, конструктивные элементы базовых систем, обеспечивающих функционирование подводного аппарата и включающих автопилот 11, размещены в герметичном отсеке 9, прилегающим к промежуточному герметичному отсеку 10 меньшего наружного диаметра. Сам аппарат выполнен из неизменяемой базовой части, включающей движительно-рулевой комплекс, модуль аккумуляторной батареи, базовые системы, обеспечивающие его функционирование и, конструктивно и функционально связанной с ней частью для размещения сменной полезной нагрузки, в состав которой включены отсек 2, проницаемый для забортной воды и герметичный отсек 12. Герметичный отсек 12 сменной полезной нагрузки с одной стороны жестко соединен с герметичным отсеком 9, в котором размещены электронные блоки базовых систем, а с другой стороны отделен прочной герметичной крышкой 13 от проницаемого для забортной воды отсека 2 сменной полезной нагрузки.
Дополнительно на чертежах показаны:
14 - электрические соединители блоков электроники автопилота и сменной полезной нагрузки;
15 - антенна забортная (wi-fi, GPS, светомаяк, датчик погружения);
16 - грузовые планки;
17 - антенна гидроакустическая;
18 - дополнительное оборудование (эхолот и пр.)
19 - носовой рым буксировочный;
20 - гермоввод забортной антенны;
21 - хомуты соединения отсеков;
22 - съемный кожух.
23 - датчик глубины;
24 - герморазъем;
25 - платформа для установки сменной полезной нагрузки;
26 - кормовой рым буксировочный.
Монтаж и сборка АНПА, а также работа с ним, осуществляется следующим образом.
Перед непосредственным использованием аппарата при необходимости устанавливается/заменяется модуль 7 АКБ, для чего отвинчивается герметичная крышка 8 кормового отсека 1 и модуль 7 АКБ, снабженный ручкой, вытягивается/ устанавливается в корпус отсека 1. Далее герметичная крышка 8 закручивается на свое место.
Для установки забортной сменной полезной нагрузки (антенны, датчики) снимается обшивка проницаемого отсека 2, устанавливается сменное оборудование, которое подключается с помощью специальных герморазъемов (на чертеже не показаны) в прочной крышке 13 к герметичному отсеку 12 сменной полезной нагрузки. Для установки сменного оборудования (полезной нагрузки) в герметичный отсек 12 необходимо снять хомут 21, соединяющий его с отсеком 2, и сдвинуть отсек 2 вперед в сторону носовой оконечности аппарата. Тем самым из отсека 12 извлекается платформа 25 для установки сменного оборудования. Закрывается отсек 12 в обратной последовательности. Перед запуском АНПА при изменении состава сменной полезной нагрузки выполняется балластировка аппарата (настройка крена и дифферента) путем установки/снятия блоков плавучести/балластировочных грузов (на чертежах не показаны) в проницаемый отсек 2 сменной полезной нагрузки.
На пирсе/судне для загрузки программы на выполнение задания оператор подключается к аппарату с пульта управления посредством радиоканала или подключенного к гермовводу аппарата кабеля.
Далее с помощью грузоподъемного оборудования аппарат спускают на воду, зацепив крюк грузового оборудования за петлю, установленную на грузовую планку 16 аппарата. На поверхности воды аппарат возможно буксировать за буксировочные рымы 19 или 26. После буксировки на безопасное расстояния от пирса/ судна оператор подает команду по радиоканалу на выполнение задания.
Далее аппарат в автоматическом режиме начинает выполнять задание по ранее загруженной программе. По окончании выполнения работ аппарат всплывает на поверхность, после чего его буксируют к пирсу/судну для зацепления грузоподъемным устройством и далее поднимают на борт судна/пирса.
После подъема на пирс/судно оператор подключается к аппарату (по кабелю или радиоканалу) и копирует собранные аппаратом данные.
Данный АНПА представляет собой версию подводного носителя, в котором отсутствует какое-либо исследовательское или обзорно-поисковое оборудование. Вместо этого предусмотрена техническая возможность подключения сменной полезной нагрузки в зависимости от поставленных задач, а базовая часть АНПА остается неизменной. Соответственно области использования АНПА определяются составом установленного оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортировщик водолазов | 2021 |
|
RU2760757C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2007 |
|
RU2334650C1 |
| ВЫСОКОМАНЕВРЕННЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2112694C1 |
| Модульный необитаемый подводный аппарат "Океаника-КИТ" | 2020 |
|
RU2738281C1 |
| Транспортировщик водолазов | 2017 |
|
RU2667113C1 |
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ГРУЗОПОДЪЕМНОСТИ (ВАРИАНТЫ) | 2015 |
|
RU2585380C1 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ХАРАКТЕРИСТИК ВЕКТОРНОГО ЗВУКОВОГО ПОЛЯ | 2017 |
|
RU2664971C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
Изобретение относится к подводным техническим средствам для исследования и освоения мирового океана. Предложен малогабаритный многофункциональный автономный необитаемый подводный аппарат (АНПА), предназначенный для выполнения широкого круга исследовательских, поисковых и подводно-технических работ на шельфе. АНПА содержит корпусную несущую конструкцию, выполненную из отсеков, в том числе из кормового герметичного отсека и прилегающего к нему герметичного отсека, последовательно и жестко соединенных между собой с возможностью их разъема в направлении продольной оси АНПА, движительно-рулевой комплекс из четырех маршевых движителей и вертикального подруливающего движителя, базовые системы, обеспечивающие функционирование АНПА, в составе системы программного управления и навигации, системы энергообеспечения на основе модуля аккумуляторной батареи, гидроакустической системы связи и системы радиосвязи, блоки плавучести. Маршевые движители установлены в хвостовой части кормового отсека на стабилизаторах, а вертикальный подруливающий движитель размещен в одном из отсеков. В кормовом отсеке размещен модуль аккумуляторной батареи. Между кормовым отсеком и прилегающим к нему герметичным отсеком дополнительно жестко установлен промежуточный герметичный отсек меньшего наружного диаметра. Конструктивные элементы базовых систем, обеспечивающих функционирование АНПА, размещены в герметичном отсеке, прилегающем к промежуточному герметичному отсеку меньшего наружного диаметра. АНПА выполнен из неизменяемой базовой части, включающей движительно-рулевой комплекс, модуль аккумуляторной батареи, базовые системы, обеспечивающие его функционирование, и конструктивно и функционально связанной с ней части для размещения сменной полезной нагрузки, в состав которой включены как отсек, проницаемый для забортной воды, так и герметичный отсек. Технический результат заключается в расширении функциональных возможностей, повышении технологичности, улучшении технического обслуживания АНПА. 1 з.п. ф-лы, 2 ил.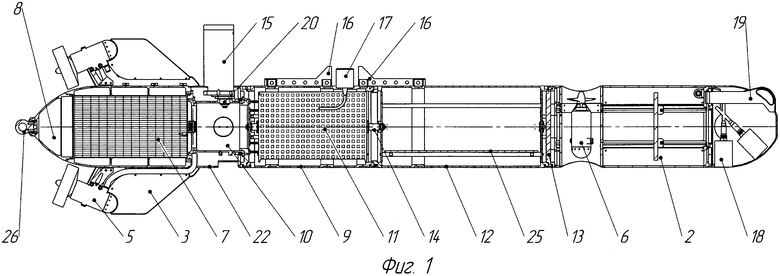
1. Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки, содержащий корпусную несущую конструкцию, которая выполнена из отсеков, в том числе из кормового отсека и прилегающего к нему герметичного отсека, последовательно и жестко соединенных между собой с возможностью их разъема в направлении продольной оси подводного аппарата, причем один из отсеков выделен под размещение в нем сменной полезной нагрузки и выполнен проницаемым для забортной воды, а на кормовом отсеке установлены два вертикальных и два горизонтальных стабилизатора, движительно-рулевой комплекс из четырех маршевых движителей и вертикального подруливающего движителя, причем маршевые движители установлены в хвостовой части кормового отсека на стабилизаторах, а вертикальный подруливающий движитель размещен в одном из отсеков, базовые системы, обеспечивающие функционирование подводного аппарата, в составе системы программного управления и навигации, системы энергообеспечения на основе модуля аккумуляторной батареи, гидроакустической системы связи и системы радиосвязи, блоки плавучести, обеспечивающие положительную плавучесть для подводного аппарата, отличающийся тем, что кормовой отсек выполнен герметичным, цилиндрической формы, а в нем размещен модуль аккумуляторной батареи, при этом с хвостовой стороны кормовой отсек снабжен быстросъемной герметичной крышкой, между кормовым отсеком и прилегающим к нему герметичным отсеком дополнительно жестко установлен промежуточный герметичный отсек, наружный диаметр которого выполнен меньше наружных диаметров соединяемых им отсеков, конструктивные элементы базовых систем, обеспечивающих функционирование подводного аппарата и включающих автопилот, размещены в герметичном отсеке, прилегающем к промежуточному герметичному отсеку меньшего наружного диаметра, а сам аппарат выполнен из неизменяемой базовой части, включающей движительно-рулевой комплекс, модуль аккумуляторной батареи, базовые системы, обеспечивающие его функционирование, и конструктивно и функционально связанной с ней части для размещения сменной полезной нагрузки, в состав которой включены как проницаемый для забортной воды, так и герметичный отсеки, при этом герметичный отсек полезной нагрузки с одной стороны жестко соединен с герметичным отсеком, в котором размещены электронные блоки базовых систем, а с другой стороны отделен прочной герметичной крышкой от проницаемого для забортной воды отсека полезной нагрузки.
2. Подводный аппарат – носитель сменной полезной нагрузки по п. 1, отличающийся тем, что вертикальный подруливающий движитель установлен в проницаемом для забортной воды отсеке сменной полезной нагрузки.
| А.В | |||
| Воронцов, Г.Ю | |||
| Илларионов, Д.Н | |||
| Михайлов | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Материалы конференции, Владивосток 2017, с | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| 0 |
|
SU161175A1 | |
| WO 03059734 A1, 24.07.2003 | |||
| Устройство для автоматической регулировки подача рассола к хлорным ваннам | 1938 |
|
SU56325A1 |
| ПОДВОДНЫЙ АППАРАТ | 2006 |
|
RU2310579C1 |
| CN 107380383 A, 24.11.2017. | |||

