Предлагаемое изобретение относится к средствам передвижения в водной среде, измерительной технике и методике и может быть использовано при проведении океанологических исследований, выполнении подводно-технических работ, поиске различных объектов с борта обитаемого подводного аппарата, а также обеспечения безопасности плавания обитаемых подводных аппаратов (ОПА).
Уровень техники.
Освещение внешней обстановки обитаемых подводных аппаратов необходимо для обеспечения решения задач при проведении с их использованием подводно-технических работ, а именно: обеспечения безопасного плавания у дна и при подъеме и опускании аппарата; поиска и обнаружения затонувших объектов; подводного осмотра (ревизии) подводных сооружений; картографирования объектов и рельефа дна; проведения экспериментальных океанологических и археологических исследований и других работ.
Известны средства и способы освещения внешней (подводной) обстановки обитаемых подводных аппаратов:
оптические средства наблюдения за окружающей обстановкой - иллюминаторы, осветительные приборы;
гидроакустические станции;
гидроакустические комплексы, способные работать в режиме секторного обзора, бокового обзора, профилирования морского дна;
подводные фототелевизионные системы;
привязные и телеуправляемые необитаемые подводные аппараты, предназначенные для обследования подводных объектов в труднодоступных местах;
лазерные телевизионные системы, применение специальных систем цифровой обработки сигнала [1, 2, 3].
Существующие системы освещения подводной обстановки на настоящий момент представлены широким спектром различных по назначению и техническим возможностям серийных станций. В каждой станции реализована возможность решения одной-двух задач.
Но необходимо отметить, что все указанные способы и средства освещения внешней обстановки подводных обитаемых аппаратов не позволяют обитаемым подводным аппаратам самостоятельно решать весь спектр стоящих перед ними задач, что обусловлено отсутствием системного подхода к организации освещения подводной обстановки.
Сущность изобретения.
В предлагаемом изобретении решается задача увеличения радиуса действия системы освещения внешней обстановки обитаемых подводных аппаратов, сокращения времени поиска объекта, его наблюдения или исследования, повышения безопасности проведения подводно-технических работ с борта обитаемых подводных аппаратов за счет создания новой технологии и структуры многоуровневой системы наблюдения.
Для реализации предложенного изобретения разработана комплексная система средств освещения подводной обстановки обитаемого подводного аппарата, являющаяся составной частью стационарного оборудования подводного обитаемого аппарата. На фиг.1 приведена ее структурная схема. Из средств освещения внешней обстановки, входящих в комплексную систему, скомплектованы три зоны поиска объектов: дальняя, средняя и ближняя в соответствии с их техническими характеристиками. Основным элементом комплексной системы освещения подводной обстановки ОПА является центральная ЭВМ (15), обеспечивающая вывод информации на унифицированный пульт управления всей системой (16), выдачу информации на пульт оператора (18) и по команде оператора выдачу данных в системы движения и навигации (17), а весь район работ оборудуется акустическими маяками.
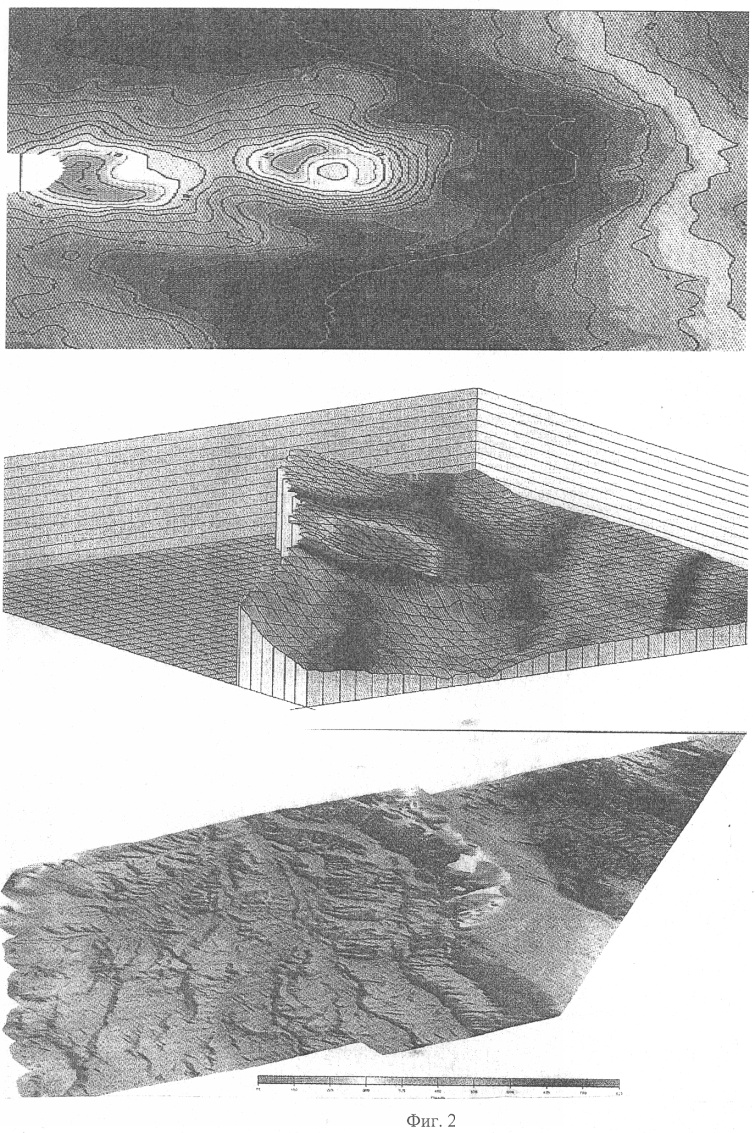
При начале работ в центральную управляющую ЭВМ вводится ряд признаков искомых объектов, средствам дальней зоны обнаружения задается режим кругового обзора, и при регистрации объекта, который может являться искомой целью, система устанавливает приоритет обнаруженной цели и выдает данные в систему навигации на движение ОПА к искомому объекту, и одновременно производит выдачу данных поисковой аппаратуре средней и ближней зоны освещения подводной обстановки для поиска и регистрации выбранной цели. Информация о работе комплексной системы освещения подводной обстановки постоянно выводится на центральный пульт оператора и пульты управления черно-белого и цветного изображения в виде трехмерной карты района с нанесенными данными о местонахождении искомого объекта. Варианты построения карт обследуемого района приведены на фиг.2. При ошибочном определении искомой цели ОПА смещается в зоне поиска на расстояние устойчивой видимости объектов средствами дальней зоны обнаружения, и вся процедура поиска повторяется. При реализации предложенного способа освещения подводной обстановки ОПА его технические возможности по поиску объектов значительно расширяются, и повышается безопасность проведения подводно-технических и исследовательских работ в придонной области океана.
Возможность осуществления.
Комплексная система освещения подводной обстановки по заданию оператора решает весь комплекс задач по поиску, обнаружению, слежению и выдаче целеуказаний в трех зонах дальности: дальней (I), средней (II) и ближней (III). Структурная схема комплексной системы приведена на фиг.1.
В состав средств освещения подводной обстановки дальней зоны входят: низкочастотный тракт гидроакустической станции секторного обзора (1); низкочастотный тракт гидроакустической станции бокового обзора (2); многолучевой эхолот (3). Данные технические средства обеспечивают освещение подводной обстановки прямо по курсу, по бортам и в нижней полусфере.
В состав средней зоны освещения подводной обстановки входят: высокочастотный тракт гидролокационной станции секторного обзора (4); высокочастотный тракт гидролокационной станции бокового обзора (5); гидролокационная станция кругового обзора (6); профилограф (7); лазерная система телевизионного зрения (8); средства звуковидения (9); телевизионные средства дальнего поиска с лазерной подсветкой (10); телеуправляемый или привязной подводный аппарат (11). Средства средней зоны обеспечивают освещение подводной обстановки прямо по курсу, по бортам и в нижней и верхней полусферах.
В состав средств ближней зоны освещения подводной обстановки входят: средства ближнего поиска и наблюдения на базе цветных телевизионных камер (12); иллюминаторы (13). Работа оптико-телевизионных средств обеспечивается системой наружного освещения (14).
Основным средством комплексной системы освещения подводной обстановки обитаемого подводного аппарата является специальное вычислительное устройство (центральная ЭВМ) (15), обеспечивающее вывод информации на унифицированный пульт управления всей комплексной системы освещения подводной обстановки (16), выдачу целеуказаний оператора (18) и выдачу данных в системы движения и навигации (17).
Методика работы по освещению подводной обстановки в заданном районе морского дна обитаемого подводного аппарата заключается в следующем. После прихода ОПА в район проведения работ производится установка акустических маяков и обзорно-поисковое обследование данного района гидроакустическими средствами дальней зоны и гидроакустическими средствами средней зоны с навигационной привязкой. В процессе обследования обнаруженный объект автоматически ведется системой и может быть передан от одной станции к другой без потери контакта с ним. Полученная информация обрабатывается вычислительной машиной и выводится оператору в виде трехмерной карты района с нанесенными данными о нахождении объектов в данном районе (фиг.2) [4].
Оператор подводного обитаемого аппарата принимает решение о поиске обнаруженных объектов. Очередность поиска задается оператором. Поиск осуществляется по данным, полученным в ходе обзорно-поискового обследования морского дна с помощью средств освещения подводной обстановки средней зоны. Вся получаемая информация обрабатывается специальным вычислительным устройством. Одновременно, по решению оператора, информация выдается в систему движения обитаемого подводного аппарата для передачи контакта с объектом средствам наблюдения ближней зоны освещения подводной обстановки.
В ходе поиска объекта информация от технических средств поступает в вычислительную машину, обрабатывается и выводится на мониторы для первичной классификации обнаруженного объекта. Одновременно происходит корректура информации, полученной в ходе обзорно-поисковых действий, после чего эта информация выводится оператору в виде уточненной трехмерной карты морского дна. При этом координирование движения обитаемого аппарата производится по данным обзорно-поискового обследования морского дна.
С обнаружением объекта контакт передается от средств средней зоны освещения средствам ближней зоны освещения подводной обстановки с последующим выходом на визуальный контакт для детального обследования обнаруженного объекта.
При положительном результате поиска оператор имеет возможность визуально убедиться в правильности найденной цели и приступить к предусмотренным в данном погружении работам или наблюдениям на искомом объекте.
Предложенное изобретение позволяет: сократить время поиска объекта исследования, упорядочить процесс поиска и в определенной степени гарантировать получение положительного результата, облегчить работу оператора и повысить безопасность плавания на обитаемом подводном аппарате.
Источники информации
1. Войтов Д.В. "Подводные обитаемые аппараты". М. Изд-во ACT, 2002. 324 с.
2. Парамонов А.А. Сторожев П.П. Телефотокомплекс для глубоководного обитаемого аппарата "Консул". Материалы VI Международной научно-технической конференции "Современные методы и средства океанологических исследований". Москва, 2000 г., с.195-198.
3. Беленький В.Н. и др. "Анализ современного состояния и тенденций развития обитаемых подводных аппаратов для комплексных океанологических исследований". Материалы VI Международной научно-технической конференции "Современные методы и средства океанологических исследований". Москва, 2003 г., с.205-228.
4. Visions in Sonar / Magasine Underwater nov-dec 2000, 35 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СПОСОБ ПРОИЗВОДСТВА ПОДВОДНЫХ РАБОТ И ОБИТАЕМЫЙ ПОДВОДНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2399552C2 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| СИСТЕМА БЕЗОПАСНОСТИ ОБЪЕКТА В ОТКРЫТОЙ АКВАТОРИИ | 2017 |
|
RU2650798C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Способ поиска затонувшего радиационного источника автономным необитаемым подводным аппаратом | 2023 |
|
RU2825830C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
Изобретение относится к измерительной технике, в частности к методике исследования океана и проведению подводно-технических работ. Для реализации способа создают комплексную систему средств освещения подводной обстановки, имеющую дальнюю, среднюю и ближнюю зоны освещения подводной обстановки, а также методику проведения работ по поиску обитаемыми подводными аппаратами (ОПА) объектов исследования. В районе работ, оборудованном акустическими маяками, обитаемым подводным аппаратом выполняют круговой обзор с использованием комплексной системы средств освещения подводной обстановки. При отсутствии положительного результата по обнаружению искомого объекта ОПА переходит, ориентируясь по акустическим маякам, в следующую точку на расстояние уверенной зоны действия системы освещения подводной обстановки и повторяет процедуру кругового обзора. При регистрации объектов, которые могут быть искомой целью, система устанавливает приоритет цели и выдает данные в систему навигации на движение аппарата к искомому объекту и целеуказание аппаратуре средней и ближней зоны освещения подводной обстановки на поиск и регистрацию выбранной цели. Вся информация от комплексной системы освещения подводной обстановки через центральную ЭВМ ОПА постоянно выводится на пульты управления с мониторами черно-белого и цветного изображения телевизионной и гидроакустической информации в виде трехмерной карты с нанесенными данными о нахождении объектов в данном районе. Изобретение обеспечивает увеличение радиуса действия системы освещения, сокращение времени поиска объекта, его наблюдения или исследования, повышение безопасности проведения подводно-технических работ с борта ОПА. 2 ил.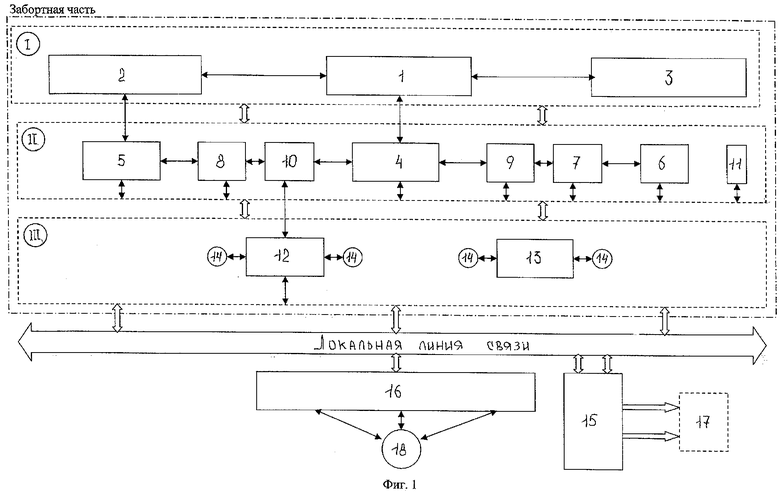
Способ комплексного освещения внешней (подводной) обстановки обитаемых подводных аппаратов (ОПА), согласно которому создают систему средств освещения внешней обстановки ОПА, включающую в себя дальнюю, среднюю и ближнюю зоны освещения подводной обстановки, первую из которых выполняют с низкочастотными трактами гидроакустических станций секторного и бокового обзора и многолучевым эхолотом, вторую - с высокочастотными трактами гидролокационных станций секторного и бокового обзора, гидролокационной станцией кругового обзора, профилографом, лазерной системой телевизионного зрения, средствами звуковидения, телевизионными средствами дальнего поиска с лазерной подсветкой, телеуправляемым или привязным необитаемым аппаратом, а третью - с телевизионными цветными камерами, иллюминаторами и системой наружного освещения, а также центральную управляющую ЭВМ, пульт управления, блок выдачи данных в системы движения и навигации и блок выдачи данных для оператора, отличающийся тем, что в центральную управляющую ЭВМ вводят характерные признаки искомых объектов, после прихода ОПА в район проведения работ последний оборудуют акустическими маяками, выполняют круговой обзор данного района средствами дальней зоны освещения, при регистрации объектов, которые могут быть искомой целью, с помощью центральной управляющей ЭВМ устанавливают приоритет обнаруженной цели и выдают данные в систему навигации на движение ОПА к искомому объекту и целеуказание средствам средней и ближней зон освещения подводной обстановки на поиск и регистрацию выбранной цели, всю информацию от системы средств освещения внешней обстановки постоянно выводят через центральную управляющую ЭВМ на пульт оператора и пульты управления с мониторами черно-белого и цветного изображения телевизионной и гидроакустической информации в виде трехмерной карты с нанесенными данными о нахождении объектов в данном районе.
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ ОСВЕЩЕНИЯ БЛИЖНЕЙ ОБСТАНОВКИ | 2001 |
|
RU2225991C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ НА МОРСКОМ РУБЕЖЕ В МЕЛКОМ МОРЕ | 1999 |
|
RU2161319C1 |
| RU 15037 U1, 10.09.2000 | |||
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1978 |
|
RU713278C |

