Область техники
Изобретения относятся к области радиотехники, в частности к способам и устройствам ввода информации в компьютеры и игровые приставки, и могут быть использованы в вычислительной технике и электронике.
Уровень техники
Проблемой в проектировании и реализации систем виртуальной реальности является взаимодействие человека с трехмерными объектами виртуального мира, т.е. разработка удобных и эффективных способов и устройств ввода соответствующей информации. Стандартные устройства персонального компьютера, такие как мышь или клавиатура, не предназначены для манипуляций в трехмерном пространстве. Актуальна разработка способа, на основе которого может быть создан манипулятор, позволяющий выполнять сложные действия интуитивно просто и с высокой точностью, в привычном для человека пространстве трех измерений.
К настоящему времени предложено и запатентовано множество манипуляторов, предназначенных для ввода в компьютер графической информации и управления курсором монитора. Все манипуляторы можно разделить на два больших класса - компьютерные мыши и электронные перья графических планшетов (дигитайзеров).
В первом случае манипулятор перемещается в пространстве всей рукой, а пальцами осуществляется управление расположенными на мыши кнопками, колесиком, мини-джойстиком и т.д. Перемещение электронного пера осуществляется подобно обычной ручке или карандашу, пальцами руки, что делает это устройство более пригодным для письма или рисования, хотя и перо может оснащаться одной или несколькими кнопками управления. Однако несмотря на такое внешнее различие принципы получения и передачи данных об изменении пространственного положения таких манипуляторов могут быть подобными.
Большинство манипуляторов работают на плоскости, т.е. в пространстве двух измерений (координаты «X» и «Y»). Основной их функцией является установка соответствия положения или смещения манипулятора на какой-то рабочей поверхности с положением или смещением курсора на экране монитора. Принцип действия наиболее распространенных электромагнитных планшетов основан на фиксации местоположения манипулятора (пера или мыши) с помощью встроенной в основание (планшет) антенны в виде решетки, состоящей из взаимно перпендикулярных проволочных или печатных проводников с характерным расстоянием между ними от 3 до 6 мм. Передатчик манипулятора излучает сигнал, который принимают проводники планшета. Встроенный в планшет микропроцессор по амплитуде сигнала с различных проводников антенной решетки вычисляет местоположение манипулятора и считывает дополнительные данные (нажатие кнопок, сила нажатия и т.д.). Разрешающая способность планшета может составлять 2540 dpi и более. Планшет начинает «чувствовать» перо приблизительно в 10 мм от своей рабочей поверхности.
Как перо, так и мышь обеспечивают абсолютное позиционирование - каждой точке рабочей поверхности планшета может быть однозначно сопоставлена позиция курсора на мониторе. По последовательным измерениям координат вычисляют векторы смещения и скорости манипулятора.
Смещение по третьей координате («Z») обычно производится с помощью колеса прокрутки. Также, при необходимости, с помощью специальных колес прокрутки обеспечиваются смещения по угловым координатам (повороты). Представляется достаточно очевидным, что во многих случаях было бы предпочтительно, если бы смещение курсора по трем координатам задавалось бы смещением манипулятора в пространстве трех измерений, а изменение угловых координат виртуальных объектов - поворотом манипулятора.
Известна модель разработки фирмы АВС Software Developers, в которой реализован способ определения положения мыши в трехмерном пространстве, основанный на использовании ультразвуковой системы передатчик-приемник (см. http://www.deria.ru/our sci invent glove.php.Обзор существующих технологий.)
Передатчик, установленный на манипуляторе, содержит громкоговоритель, излучающий ультразвуковые импульсы. Приемник соответственно содержит несколько пространственно разнесенных миниатюрных микрофонов, улавливающих эти сигналы. По разнице времени прихода акустических волн на различные микрофоны вычисляют трехмерное значение положения 3D - мыши.
Недостатком вышеуказанного способа является использование акустических волн в приемопередающем устройстве, что влияет на точность определения пространственных координат манипулятора. У действующих образцов даже в идеальных условиях погрешность измерения координаты превышает 1 мм. Между тем, скорость звука зависит от атмосферного давления, температуры и других условий (например, влажности), что существенно влияет на точность измерения. Помимо этого данные системы требуют прямой видимости передатчика и приемника и отсутствия отражающих сигналы передатчика поверхностей.
Наконец, ультразвуковые устройства, реализующие данный способ, восприимчивы к различного рода шумам, например, производимым оборудованием - компьютерами, кондиционерами и т.д.
По технической сущности наиболее близким к предложенному способу является способ определения координат манипулятора типа «электронное перо», заключающийся в том, что в манипулятор встраивают передатчик с одной антенной, генерирующий импульсы электромагнитного поля, которые принимает антенна приемника, встроенная в планшет (см. Патент США №3598903 от 06.06.1968 г, «POSITION-IDENTIFYING DEVICE», авторы: Johnson; Robert A. (Raleigh, NC), Steckenrider; Ray N. (Raleigh, NC), заявитель: International Business Machines Corporation (Armonk, NY)).
По технической сущности наиболее близким к предложенному устройству является устройство определения координат манипулятора типа «электронное перо», антенна приемника которого выполнена в виде прямоугольной сетки проводников, в которых поле, генерируемое антенной манипулятора, возбуждает электрические сигналы, а по величине амплитуды сигналов в проводниках определяются координаты антенны передатчика, а следовательно, и координаты манипулятора относительно поверхности планшета (см. Патент США №3598903 от 06.06.1968 г, «POSITION-IDENTIFYING DEVICE», авторы: Johnson; Robert A. (Raleigh, NC), Steckenrider; Ray N. (Raleigh, NC), заявитель: International Business Machines Corporation (Armonk, NY)).
Вышеуказанные способ и устройство, реализованные в электромагнитных планшетах, имеют ограниченные функциональные возможности и область применения, так как обладают следующими недостатками:
1. Рабочая площадь перемещения манипулятора ограничена размерами планшета.
2. Отсутствует возможность определения пространственных и угловых координат манипулятора в пространстве трех измерений.
Техническим результатом заявляемых изобретений является расширение функциональных возможностей и области применения путем создания способа и устройства определения положения манипулятора типа «мышь» или «электронное перо» для ввода данных в компьютеры и игровые приставки без ограничения рабочей площади перемещения манипулятора размерами планшета, при перемещении манипулятора на плоскости, и дающего возможность определения пространственных и угловых координат манипулятора в пространстве трех измерений.
Достигается это тем, что в способе определения координат манипулятора типа «мышь» или «электронное перо» для введения данных в компьютеры и игровые приставки, согласно изобретению создают излучение электромагнитных волн с помощью встроенной в манипулятор основной антенны передатчика, осуществляют прием этих электромагнитных волн с помощью по меньшей мере трех пространственно разнесенных антенн приемника - базовой и рабочих - в случае перемещения манипулятора по плоскости и с помощью как минимум четырех пространственно разнесенных антенн приемника - базовой и рабочих - для случая перемещения манипулятора в пространстве, измеряют разности фаз сигналов на различных парах антенн приемника - базовой и каждой рабочей - и по соотношениям разностей фаз вычисляют координаты манипулятора на плоскости или в пространстве, кроме того, создают дополнительное излучение электромагнитных волн с помощью одной и более пространственно разнесенных и встроенных в манипулятор дополнительных антенн передатчика, излучение с которых происходит в различные интервалы времени, по соотношениям разностей фаз на различных парах базовой и рабочих антенн приемника вычисляют положение каждой из антенн манипулятора в пространстве и по их положению вычисляют его угловые координаты.
Для достижения поставленного технического результата устройство для определения координат манипулятора типа «мышь» или «электронное перо» согласно второму изобретению содержит передатчик манипулятора со встроенной в манипулятор основной антенной и приемное устройство, включающее не менее трех пространственно разнесенных антенн - одной базовой и рабочих, при перемещении манипулятора по плоскости, и не менее четырех пространственно разнесенных антенн - одной базовой и рабочих, при перемещении манипулятора в пространстве, причем базовая антенна через последовательно соединенные полосовой фильтр и усилитель соединена с входом амплитудного детектора, а каждая рабочая антенна приемного устройства через последовательно соединенные полосовой фильтр и усилитель подключена к первому входу соответствующего фазового детектора, второй вход каждого из которых подключен к входу амплитудного детектора, при этом выходы амплитудного и фазовых детекторов соединены с соответствующими входами аналого-цифрового преобразователя, выход которого соединен со входом микроконтроллера, обеспечивающего ввод данных в ЭВМ или игровую приставку, кроме того, передатчик манипулятора может быть снабжен встроенной в него по крайней мере одной дополнительной антенной, причем основная и дополнительная (ые) антенны передатчика пространственно разделены.
Сущность изобретений заключается в том, что выполнение операций способа вышеописанным образом и создание устройства с вышеописанной совокупностью признаков позволяет обеспечить возможность определения пространственных и угловых координат манипулятора в пространстве трех измерений и исключить зависимость и ограничения на рабочую поверхность перемещения манипулятора.
Сравнение предлагаемых изобретений с ближайшим аналогом позволяет утверждать о соответствии критерию «новизна», а отсутствие отличительных признаков в известных аналогах говорит о соответствии критерию «изобретательский уровень».
Предварительные испытания подтверждают возможность широкого промышленного использования.
На Фиг.1 представлен пример схемы реализации заявляемого устройства для работы манипулятора на плоскости, на Фиг.2 - пример пространственной схемы расположения антенн приемного устройства и манипулятора типа «электронное перо», на Фиг.3 - пространственная схема расположения антенн приемника и манипулятора при работе на плоскости, на Фиг.4 - пример пространственной схемы расположения антенн приемного устройства и манипулятора для работы в пространстве и на Фиг.5 - пилотный образец устройства.
Предлагаемый способ определения координат манипулятора типа «мышь» или «электронное перо» реализуется следующим образом.
Для введения данных в компьютеры и игровые приставки создают излучение электромагнитных волн с помощью встроенной в манипулятор основной антенны передатчика. Далее осуществляют прием этих электромагнитных волн с помощью, по меньшей мере, трех пространственно разнесенных антенн приемника - базовой и рабочих - в случае перемещения манипулятора по плоскости, и с помощью как минимум четырех пространственно разнесенных антенн приемника - базовой и рабочих - для случая перемещения манипулятора в пространстве. После этого измеряют разности фаз сигналов на различных парах антенн приемника - базовой и каждой рабочей - и по соотношениям разностей фаз вычисляют координаты манипулятора на плоскости или в пространстве.
Кроме того, для определения координат манипулятора типа «электронное перо» создают дополнительное излучение электромагнитных волн с помощью одной и более пространственно разнесенных и встроенных в манипулятор дополнительных антенн передатчика, излучение с которых происходит в различные интервалы времени, по соотношениям разностей фаз на различных парах базовой и рабочих антенн приемника вычисляют положение каждой из антенн манипулятора в пространстве и по их положению вычисляют его угловые координаты.
Устройство для определения координат манипулятора типа «мышь» или «электронное перо» содержит передатчик 1 манипулятора со встроенной в манипулятор основной антенной и приемное устройство, включающее не менее трех пространственно разнесенных антенн - одной базовой антенны 2-1 и двух рабочих антенн 2-2 и 2-3 - при перемещении манипулятора по плоскости и не менее четырех пространственно разнесенных антенн 2-1, 2-2, 2-3 и 2-4 - одной базовой и рабочих - при перемещении манипулятора в пространстве.
Базовая антенна 2-1 через последовательно соединенные полосовой фильтр 3-1 и усилитель 4-1 соединена с входом амплитудного детектора 5, а каждая рабочая антенна 2-2 (2-3) приемного устройства через последовательно соединенные полосовой фильтр 3-2 (3-3) и усилитель 4-2 (4-3) подключена к первому входу соответствующего фазового детектора 6 (7). Второй вход каждого из фазовых детекторов 6 (7) подключен к входу амплитудного детектора 5, при этом выходы амплитудного и фазовых детекторов 5 и 6 (7) соединены с соответствующими входами аналого-цифрового преобразователя 8, выход которого соединен со входом микроконтроллера 9, обеспечивающего ввод данных в ЭВМ или игровую приставку через интерфейс 10. Кроме основной антенны 11-1 передатчик 1 манипулятора может быть снабжен встроенной в него по крайней мере одной дополнительной антенной 11-2, причем основная и дополнительная (ые) антенны 11-1 и 11-2 передатчика пространственно разделены.
Способ и устройство реализуются следующим образом.
Регистрация сигнала мыши тремя и более антеннами 2-1 - 2-3 с последующим анализом сигнала на фазовых детекторах 6, 7 (Фиг.1) позволяет определить ее координату на плоскости и в пространстве с высокой точностью. Фазовые методы могут обеспечивать относительную погрешность измерения ~10-5-10-6.
Генератор мыши может работать в полосе частот, соответствующей работе современных беспроводных изделий. С частотой, например, в несколько десятков герц генерируются пакеты импульсов, в которых сначала передается информация о состоянии кнопок (аналогично тому, как это происходит у существующих мышей), а потом передается непрерывный сигнал длительностью, например, в несколько десятков микросекунд, во время которого происходит работа фазовых детекторов 6, 7. При необходимости, для уменьшения погрешности определения координат манипулятора за счет использования статистических методов возможно повышение частоты генерации пакетов импульсов. Показания фазовых детекторов 6, 7 с использованием тригонометрических формул на микроконтроллере 9 базы преобразуются в координаты мыши и по стандартному протоколу вся информация (состояние кнопок и изменение координат) передается в компьютер.
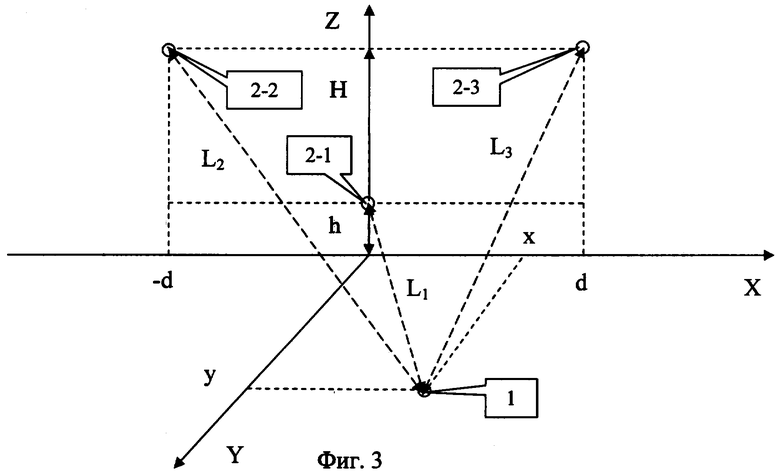
Рассмотрим фазовые соотношения. Для простоты рассмотрим случай, когда манипулятор (мышь) может перемещаться по полуплоскости (X-Y, Z=0, Y>0) (см. Фиг.3), где h - высота расположения над рабочей плоскостью антенны 2-1; Н - высота расположения над рабочей плоскостью антенн 2-2 и 2-3; 2d - ширина разнесения антенн 2-2 и 2-3; L1, L2, L3 - расстояния от передатчика до соответствующих антенн.
Тогда фазы сигналов от передатчика 1 манипулятора, работающего на длине волны λ, будут соответственно равны:




Собственно фаза волны в данном случае физического смысла не имеет, но имеет смысл и измерима разность фаз между сигналами, например, второй и первой (ϕ21) и третьей и первой (ϕ31) антенн:


В принципе, измеряя разности фаз ϕ21 и ϕ31 по системе уравнений (5, 6), можно вычислить координаты х, у, а следовательно, положение манипулятора. Для нормальной работы манипулятора изменения координат излучателя должны быть однозначно связаны с изменениями разности фаз. Запишем выражения для дифференциалов dϕ21 и dϕ31, взятые в точке х, у:


Найдем определитель Δ системы уравнений (7, 8):






После подстановки получаем:

Как следует из Фиг.3, при выбранной геометрии расположения антенн Н>h, поэтому, во всяком случае, вблизи оси «Y» (х→0) и при у>0 определитель Δ≠0 и связь изменения координат манипулятора с изменениями разности фаз однозначна.
Аналогичные соотношения могут быть получены и для пространственного манипулятора, вариант расположения антенн которого представлен на Фиг.4, где Н - высота расположения антенн 2-2 и 2-3; 2d - ширина разнесения антенн 2-2 и 2-3; h - глубина вынесения антенны 2-1 за плоскость расположения антенн 2-2, 2-3, 2-4; L1, L2, L3, L4 - расстояния от манипулятора до антенн 2-1, 2-2, 2-3,2-4.
При использовании манипулятора по заявляемому способу в качестве компьютерной мыши для работы на плоскости на ограниченной площади может потребоваться режим не «абсолютного» соответствия положения курсора на мониторе и координаты мыши, а относительного смещения (перетаскивания) курсора, при смещении мыши с прерыванием, соответствующим отрыву традиционных манипуляторов от поверхности стола или коврика. Соответственно представляется необходимым оснастить манипулятор - мышь - датчиком касания поверхности (например, тензорезистивным) или специальной управляющей кнопкой.
В некоторых случаях для повышения точности работы устройства может оказаться целесообразным использование большего количества антенн, чем 3 в «плоском» случае и 4 в «объемном». Тогда можно провести большее число измерений и усреднить результат. Это аналогично ситуации повышения точности устройств GPS в условиях увеличения «видимости» большего числа спутников.
Встроив в манипулятор две антенны с последовательно запускаемыми генераторами передатчика или с одним генератором, переключаемым на две антенны, можно определить не только пространственное положение манипулятора, но и его ориентацию (см. Фиг.2). Это может быть существенно как в графических приложениях (определение наклона пера), так и при работе с пространственными объектами. В частности, разработка заявляемого устройства в варианте определения пространственных и угловых координат может быть актуальна для игровых приложений.
Антенны и прочие элементы приемника могут быть встроены как в специально созданную конструкцию - «базу» устройства, так и в существующие элементы компьютерной и игровой техники, например монитор, клавиатуру или системный блок.
В целом возможна разработка следующих вариантов заявляемого устройства:
2D (определение координаты на плоскости),
2D/1S (определение координаты и угла поворота на плоскости);
3D (определение координаты в пространстве);
3D/2S (определение координаты и направления манипулятора в пространстве);
3D/3S (полное определение пространственных и угловых координат манипулятора).
Ввиду того, что «электромагнитные» (или «индукционные») манипуляторы, способные работать в трехмерном объеме, а не только на плоскости, до заявляемого изобретения отсутствуют, оно соответствует критерию "новизна".
Ввиду того, что использование фазочувствительной электроники неочевидно для построения компьютерных манипуляторов, способных работать в трехмерном объеме, заявляемое изобретение соответствует критерию "изобретательский уровень".
Областью применения устройств на основе заявляемого способа может быть промышленность (CAD - проектирование, 3D - моделирование), индустрия развлечений (компьютерные игры, игровые консоли, игровые автоматы) и т.д. Заявляемое изобретение относительно несложно в реализации. Это было показано при изготовлении пилотного образца устройства. Стоимость электронных компонентов для реализации данного устройства относительно невелика и может быть еще более снижена при выпуске специализированных микросхем в серийном производстве, что обеспечит конкурентоспособность с имеющимися аналогами. Соответственно заявляемое изобретение соответствует критерию "промышленная применимость".
Сведения, подтверждающие возможность осуществления изобретения.
Создан пилотный образец устройства по заявляемому изобретению (см. Фиг.5). На данном пилотном образце была продемонстрирована реализуемость фазочувствительных манипуляторов. Передающее устройство выполнено по схеме с кварцевой стабилизацией частоты и амплитудно-импульсной модуляцией сигнала.
Устройство передает кодированные сигналы идентификации и нажатия кнопок, а также сигнал определенной длительности для фазовых измерений. Все сигналы формируются с помощью микроконтроллера 9. В начале пакета следуют байты идентификации, далее байты с информацией о состоянии кнопок и начала измерений разности фаз. Пакет заканчивается непрерывным импульсом с длительностью, достаточной для проведения фазовых измерений.
Приемное устройство выполнено по схеме прямого усиления с кварцевыми фильтрами на входе.
Устройство обработки фазовых сигналов преобразует аналоговый сигнал, пропорциональный разности фаз, в цифровой вид и выполняет расчет текущих координат манипулятора. Оно выполнено на микроконтроллере со встроенным аналого-цифровым преобразователем. На этом же микроконтроллере реализована система команд и протокол обмена по шине USB.
Т.е. управляющая программа приемного устройства распознает команды передающего устройства путем анализа сигнала, выделенного амплитудным детектором, затем рассчитывает текущие координаты манипулятора по сигналам фазовых детекторов и выдает необходимые сигналы на компьютер, используя систему команд стандартной мыши и протокол USB. Управляющая программа для микроконтроллера создана с помощью соответствующего программного обеспечения и загружается в микроконтроллер посредством стандартного программатора.
Конструктивно передающее устройство собрано в корпусе стандартной беспроводной оптической мыши.
Приемное устройство пилотного образца выполнено в стандартном экранированном корпусе. Антенны, в качестве которых могут быть использованы магнитные антенны, соединены с приемным устройством с помощью разъемов SMA. Питание приемного устройства может осуществляться по шине USB.
Таким образом, в предложенных изобретениях обеспечивается возможность определения пространственных и угловых координат манипулятора в пространстве трех измерений и исключается зависимость и ограничения на рабочую поверхность перемещения манипулятора.



Изобретение относится к области радиотехники, в частности к способам и устройствам ввода информации в компьютеры и игровые приставки. Для расширение функциональных возможностей и области применения манипулятора типа «мышь» или «электронное перо» создают излучение электромагнитных волн с помощью встроенной в манипулятор основной антенны передатчика. Прием этих электромагнитных волн осуществляют с помощью по меньшей мере трех пространственно разнесенных антенн приемника - в случае перемещения манипулятора по плоскости и с помощью как минимум четырех пространственно разнесенных антенн приемника - в случае перемещения манипулятора в пространстве. Измеряют разности фаз сигналов на различных парах антенн приемника и по соотношениям разностей фаз вычисляют координаты манипулятора на плоскости или в пространстве. Устройство для определения координат манипулятора типа «мышь» или «электронное перо» содержит передатчик манипулятора со встроенной в манипулятор основной антенной и приемное устройство, включающее не менее трех пространственно разнесенных антенн при перемещении манипулятора по плоскости и не менее четырех пространственно разнесенных антенн при перемещении манипулятора в пространстве. 2 н. и 2 з.п. ф-лы, 5 ил.
1. Способ определения координат манипулятора типа «мышь» или «электронное перо» для введения данных в компьютеры и игровые приставки, характеризующийся тем, что создают излучение электромагнитных волн с помощью встроенной в манипулятор основной антенны передатчика, осуществляют прием этих электромагнитных волн, с помощью по меньшей мере трех пространственно разнесенных антенн приемника, в случае перемещения манипулятора по плоскости, и с помощью как минимум четырех пространственно разнесенных антенн приемника, для случая перемещения манипулятора в пространстве, измеряют разности фаз сигналов на различных парах антенн приемника и по соотношениям разностей фаз вычисляют координаты манипулятора на плоскости или в пространстве.
2. Способ по п.1, отличающийся тем, что создают дополнительное излучение электромагнитных волн с помощью одной и более пространственно разнесенных и встроенных в манипулятор дополнительных антенн передатчика, излучение с которых происходит в различные интервалы времени, по соотношениям разностей фаз на различных парах антенн приемника вычисляют положение каждой из антенн передатчика манипулятора в пространстве и по их положению вычисляют его угловые координаты.
3. Устройство для определения координат манипулятора типа «мышь» или «электронное перо», характеризующееся тем, что оно содержит передатчик манипулятора со встроенной в манипулятор основной антенной и приемное устройство, включающее не менее трех пространственно разнесенных антенн, при перемещении манипулятора по плоскости, и не менее четырех пространственно разнесенных антенн, при перемещении манипулятора в пространстве, причем одна антенна через последовательно соединенные полосовой фильтр и усилитель соединена с входом амплитудного детектора, а каждая другая антенна приемного устройства через последовательно соединенные полосовой фильтр и усилитель подключена к первому входу соответствующего фазового детектора, второй вход каждого из которых подключен к входу амплитудного детектора, при этом выходы амплитудного и фазовых детекторов соединены с соответствующими входами аналого-цифрового преобразователя, выход которого соединен со входом микроконтроллера, обеспечивающего ввод данных в ЭВМ или игровую приставку.
4. Устройство по п.3, отличающееся тем, что передатчик манипулятора снабжен встроенной в него по крайней мере одной дополнительной антенной, причем антенны передатчика пространственно разделены.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В КОМПЬЮТЕР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2082995C1 |
| US 5239139 A, 24.08.1993 | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| US 3598903, 06.06.1968. | |||

