Ссылки на родственные заявки
Приоритет настоящей заявки основан на предварительной патентной заявке US 60/596205, поданной 8 сентября 2005 г., содержание которой посредством ссылки полностью включено в настоящее описание.
Область техники, к которой относится изобретение
Настоящее изобретение в общем относится к тормозным системам, более точно - к способу и устройству для избирательного отключения привода на ведущие колеса наземного транспортного средства (далее - автомобиля) в условиях полного затормаживания колес.
Предпосылки создания изобретения
Известны системы управления автоматическими и полуавтоматическими механическими трансмиссиями (АМТ), которыми по меньшей мере частично управляют с использованием электронных систем управления на основе дискретных логических схем и(или) программно-управляемых микропроцессоров. Решения о выборе передачи и переключении принимают на основании определенных измеренных и(или) вычисленных параметров, известных системе управления, таких как скорость движения автомобиля (или число оборотов выходного вала коробки передач), число оборотов входного вала коробки передач, число оборотов двигателя, быстрота изменения скорости движения автомобиля, быстрота изменения числа оборотов двигателя, положение регулятора газа, быстрота изменения положения регулятора газа, полное нажатие на газ, приведение в действие тормозного механизма, текущее выбранное передаточное отношение и т.п. Примеры таких систем управления автоматической трансмиссией автомобилей описаны в патентах US 4361060; 4551802; 4527447; 4425620; 4463427; 4081065; 4073203; 4253348; 4038889; 4226295; 3776048, 4208929; 4039061; 3974720; 3478851 и 3942393, содержание которых посредством ссылки включено в настоящее описание.
Также известны автоматические антиблокировочные или противоблокировочные тормозные системы (ABS, от английского - anti-skid or antilock braking system) автомобилей. Обычно в случае полного затормаживания или буксования колес автомобиля обнаруживают действительное или приближающееся полное затормаживание колес и позволяют колесам вращаться со скоростью движения автомобиля перед тем, как снова использовать тормоза. Примеры антиблокировочных или противоблокировочных тормозных систем описаны в патентах US 3767270; 3768872; 3854556; 3920284; 3929382; 3996267 и 3995912, раскрытия которых посредством ссылки включены в настоящее описание. В патенте US 4899279, который также посредством ссылки включен в настоящее описание, описаны системы АМТ и ABS автомобиля, в которых при действительном или приближающемся полном затормаживании колес система ABS взаимодействует с системой управления АМТ автомобиля с целью отключения привода от двигателя на ведущие колеса автомобиля. При выключении привода от двигателя на ведущие колеса автомобиля ослабляется инерционная тенденция двигателя и сцепления, препятствующая способности колес вращаться со скоростью движения автомобиля.
Несмотря на то, что отключение привода от двигателя на ведущие колеса с целью обеспечения их вращения является полезным в большинстве случаев, при некоторых обстоятельствах это может быть неблагоприятно. Например, если грузовой автомобиль большой грузоподъемности спускается по крутому склону и возникает ситуация приближающегося или действительного полного затормаживания колес (что может произойти из-за торможения двигателем или выбитого покрытия дороги), отключение привода от двигателя на ведущие колеса может быть неблагоприятно. Более точно, если колеса грузового автомобиля расцеплены с двигателем, у автомобиля немедленно прекращает действовать торможение двигателем, в результате чего может возникнуть крен автомобиля вперед и(или) потеря управления водителем. Кроме того, при выключении сцепления исчезает сопротивление движению при включенном приводе на ведущие колеса, обеспечиваемое инерцией двигателя. За счет этой инерции двигателя автомобиль медленнее ускоряется при включенном приводе на ведущие колеса. Данная ситуация также способна привести к потере управления водителем или по меньшей мере к ощущению дискомфорта при ее возникновении. Рассмотренный двигатель может служить примером более общего первичного двигателя транспортного средства, т.е. любой силовой установки, обеспечивающей энергией привод транспортного средства на ведущие колеса или другие потребляющие энергию компоненты транспортного средства. Примерами первичных двигателей являются дизельные двигатели, электродвигатели и гибридные энергосистемы.
Соответственно, в настоящем изобретении предложена система АМТ и ABS автомобиля, способная избирательно расцеплять двигатель и колеса транспортного средства, но только при соответствующих условиях.
Краткое изложение сущности изобретения
Недостатки известного уровня техники сведены к минимуму в настоящем изобретении за счет предлагаемой системы управления, предпочтительно электронной системы управления, и способа управления автоматическими механическими трансмиссиями (АМТ) и антиблокировочными тормозными системами (ABS), в котором сцепление/расцепление двигателя транспортного средства и колес транспортного средства осуществляют в зависимости от измеренных и(или) вычисленных параметров, включая без ограничения входные сигналы, отображающие скорость вращения колес, угол наклона/уклона транспортного средства, работу тормозов, число оборотов двигателя, число оборотов входного вала коробки передач и число оборотов выходного вала коробки передач. Для принятия решений при управлении системами АМТ и(или) ABS также могут использоваться другие входные сигналы/параметры, такие как сигналы, отображающие положения регулятора газа или тормоза, быстроту изменения положений регулятора газа или положений тормоза, состояние главной муфты сцепления, текущее выбранное передаточное отношение, массу транспортного средства, колесную формулу транспортного средства (2Х4, 2Х6 и т.д.), эффективную тормозную мощность двигателя и т.п. При осуществлении способа обнаруживают состояние полного затормаживания колес, состояние транспортного средства в момент полного затормаживания колес (массу транспортного средства, угол наклона/уклона и т.п.) и в зависимости от них управляют АМТ или ABS.
Для этого используют электронный блок управления со средством ввода для приема сигнала, отображающего полное затормаживание колес, например от антиблокировочной тормозной системы транспортного средства, и логическую схему для обработки входных сигналов с целью определения присутствия или отсутствия состояния полного затормаживания колес и рабочего состояния транспортного средства (массы транспортного средства, угла наклона/уклона и т.п.). После обнаружения полного затормаживания колес и состояния транспортного средства, например, на крутом спуске или ровной дороге сцепление транспортного средства или другой избирательно расцепляемый привод на ведущие колеса оставляют включенным во избежание нежелательного крена вперед или выключают, чтобы колеса могли вращаться со скоростью движения транспортного средства. Если обнаружено, что причиной полного затормаживания колес является тормоз двигателя транспортного средства, что, например, может произойти в условиях обледеневшего или выбитого дорожного покрытия, ABS регулирует или корректирует тормоз двигателя транспортного средства. При осуществлении способа дополнительно обнаруживают окончание полного затормаживания колес.
В одном из вариантов осуществления изобретения предложен способ отмены антиблокировочного действия антиблокировочной тормозной системы транспортного средства большой грузоподъемности, такого как транспортное средство для коммерческих перевозок, имеющее автоматическую механическую трансмиссию. При осуществлении способа обнаруживают событие пробуксовки колес, достаточное для инициирования антиблокировочного действия антиблокировочной тормозной системы. Специалисты в данной области техники поймут, что примеры таких событий включают проскальзывание колес на скользком покрытии или пробуксовку на рыхлом грунте, при этом оба эти события являются событиями, которые обычно обнаруживают системы ABS. Затем определяют, движется ли транспортное средство большой грузоподъемности под гору, уклон которой превышает заданное значение уклона. Если установлено, что спуск является достаточно крутым, инициирование антиблокировочного действия будет отменено; иными словами, на буксующие колеса будет продолжено оказание тормозящего действия вопреки обычному протоколу ABS. Важным обоснованием данной процедуры является тот факт, что водитель будет испытывать отклоняющееся от нормы, возможно нервозное состояние, если во время движения под гору транспортного средства большой грузоподъемности усилия торможения неожиданно прекратились без предупреждения водителя.
Пороги или заданные значения уклона, при превышении которых отменяются процедуры ABS, преимущественно находятся в диапазоне от около пяти до восьми процентов, что соответствует относительно крутым уклонам дороги.
В дополнение к этим мерам также предусмотрено, что, если не установлено, что транспортное средство движется под гору с достаточно крутым уклоном, разрешается инициирование и осуществление предупредительных мер ABS в случае обнаружения заданной пробуксовки колес. Это особенно относится к случаям, когда транспортное средство большой грузоподъемности движется по преимущественно ровной или слабо пересеченной местности.
Соответственно, в настоящем изобретении предложены устройство и способ управления системами АМТ и ABS транспортного средства с целью избирательного расцепления двигателя и колес транспортного средства в условиях полного затормаживания колес.
Краткое описание чертежей
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые чертежи, на которых показано:
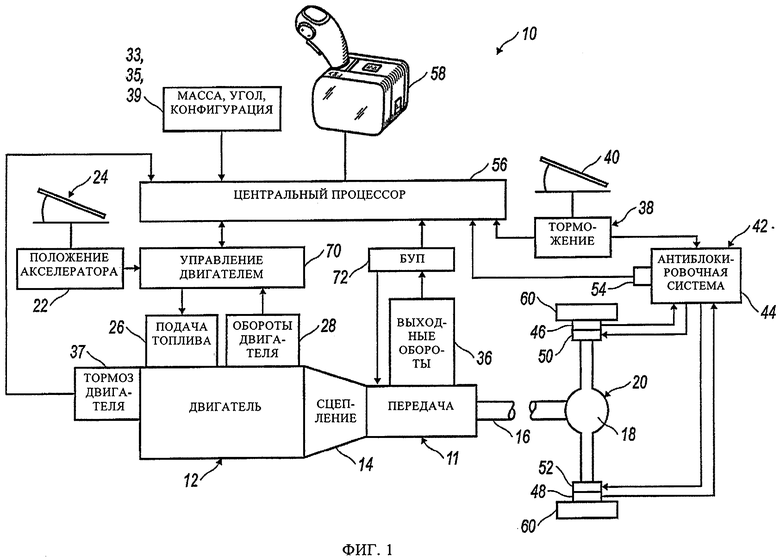
на фиг.1 схематически проиллюстрированы компоненты системы управления автоматической механической трансмиссией и антиблокировочной тормозной системы согласно настоящему изобретению и
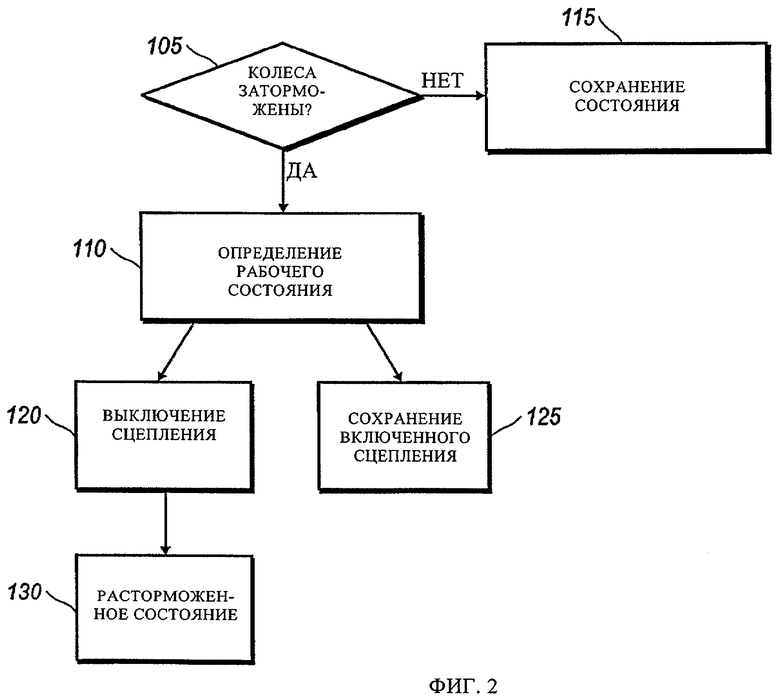
на фиг.2 - блок-схема, иллюстрирующая взаимодействие между датчиками и логическим управляющим устройством согласно изобретению.
Подробное описание изобретения
На фиг.1 схематически проиллюстрирована автоматическая механическая система 10 передачи автомобиля, включающая автоматическую многоступенчатую коробку 11 передач с приводом от первичного двигателя или двигателя 12, такого как хорошо известный дизельный двигатель, посредством главной муфты 14 сцепления. Крутящее усилие на выходе автоматической коробки 11 передач обеспечивает выходной вал 16, обеспечивающий соединение для передачи момента соответствующему компоненту автомобиля, такому как головка дифференциала в сборе 18 ведущего моста 20 автомобиля. На упомянутые детали силовой передачи воздействуют и контролируют их несколько устройств, каждое из которых более подробно рассмотрено далее. Эти устройства включают устройство 22 контроля положения педали акселератора, которое определяет положение регулируемой водителем педали 24 акселератора, устройство 26 регулирования подачи топлива для регулирования количества топлива, подаваемого в двигатель 12, датчик 28 числа оборотов двигателя, который определяет частоту вращения двигателя, устройство управления сцеплением (не показано), которое сцепляет и расцепляет главную муфту 14 сцепления и также может передавать информацию о состоянии сцепления, датчик числа оборотов входного вала коробки передач (не показан), устройство управления коробкой передач (не показано), которое служит для переключения коробки 11 передач на выбранное передаточное отношение и может передавать сигнал, отображающий текущее выбранное передаточное отношение, и датчик 36 числа оборотов выходного вала коробки передач. В качестве альтернативы текущее выбранное передаточное отношение может быть определено путем сравнения числа оборотов входного и выходного валов коробки передач.
Кроме того, устройство контроля положения педали акселератора взаимодействует с блоком 70 управления двигателем, который в свою очередь взаимодействует с центральным процессором 56, а также регулятором 26 подачи топлива и датчиком 28 числа оборотов двигателя. Блок 72 управления переключением передач (БУП) способен взаимодействовать с коробкой 11 передач и устройством управления коробкой передач, а также другими датчиками, контролирующими коробку передач, такими как датчик 36 числа оборотов выходного вала коробки передач. Хотя центральный процессор 56, БУП 72 и блок 70 управления двигателем показаны как три отдельных устройства, они могут быть объединены в едином устройстве. В качестве альтернативы эти отдельные устройства могут включать несколько управляющих устройств. Например, БУП 72 может иметь два управляющих устройства, одно из которых рассчитано на выбор передачи, а другое - на переключение передачи. Переключение передачи описывает действительное зацепление механических элементов коробки 11 передач. Например, переключение передачи является процессом действительного перемещения механических деталей коробки 11 передач в установленном порядке с целью вхождения в зацепление или выхода из зацепления с зубчатым колесом или иного управления коробкой 11 передач в зависимости от заданного запроса или команды. Выбор передач представляет собой процесс выбора желаемой передачи или принятия решения о сохранении текущей передачи. Кроме того, при выборе передач могут учитываться различные параметры с целью определения соответствующей передачи для включения. В автоматической коробке 11 передач управление передачей осуществляют на основе стратегии выбора передач, которую используют, чтобы определить, какую передачу следует включить, после чего применяют стратегию переключения передачи и осуществляют действительное требуемое переключение коробки 11 передач.
Для обнаружения приведения в действие педали 40 тормоза автомобиля может использоваться датчик 38 тормоза. Автомобиль также может быть оснащен датчиками 33, 35, 37 и 39 для обнаружения рабочего состояния автомобиля, которое может, без ограничения, включать массу автомобиля, угол наклона/уклона автомобиля, тормозное усилие двигателя, конфигурацию автомобиля (2Х2, 2Х4, 2Х6 и т.д.) и т.п., и сообщения о нем. В данном случае конфигурацией автомобиля является число ведомых колес из общего числа колес автомобиля. В случае конфигурации 2Х6 одна колесная пара может быть приподнята относительно остальных колесных пар. Эти приподнятые колеса могут быть приподняты не полностью, а оставаться в контакте с поверхностью дороги с меньшим усилием по сравнению с остальными колесами. Следовательно, более вероятным является полное затормаживание колесной пары с меньшим усилием контакта с поверхностью дороги. В типичном варианте осуществления система 42 ABS сообщает, какие колеса заторможены, и на основании этой информации определяют, следует ли выключить сцепление. Если заторможенные колеса не являются ведущими колесами автомобиля, сцепление предпочтительно оставляют включенным. Эта информация может использоваться независимо или в дополнение к другой информации, которая описана далее, для определения момента, когда следует выключить сцепление.
Автомобиль также может быть оснащен антиблокировочной системой известной конструкции, которая в целом обозначена позицией 42. В нескольких словах, антиблокировочная система включает центральное антиблокировочное логическое устройство 44, принимающее входные сигналы различных датчиков скорости вращения колес, таких как датчики 46 и 48, с целью определения наличия действительного или приближающегося состояния полного затормаживания колес и передающее устройствам 50 и 52 управления тормозом команды оптимизации останова и управления автомобилем. Если автомобиль оснащен антиблокировочной системой 42, она может передавать системе 10 АМТ входной сигнал датчика 54 блокировки или затормаживания.
Упомянутая система АМТ передает информацию центральному процессору или контроллеру 56 или принимает от него команды. Центральный процессор 56 может включать аналоговую и(или) цифровую электронную аппаратную логику или, предпочтительно, представлять собой микропроцессорную систему с использованием программно реализованной логики. Центральный процессор 56 также принимает информацию от переключателя 58 передач, с помощью которого водитель может выбирать режим реверса (R), нейтральный (N), автоматический (А) или ручной (М) режим работы автомобиля.
Источник электропитания (не показан) и(или) источник жидкости или газа под давлением (не показан) обеспечивают электрической и(или) пневматической энергией различные воспринимающие, функциональные и(или) обрабатывающие устройства. В другом варианте осуществления для управления двигателем и трансмиссией могут быть предусмотрены отдельные устройства. Эти два отдельных управляющих устройства предпочтительно связаны друг с другом с возможностью совместно использовать соответствующую информацию. Выше в качестве примеров описаны возможные конфигурации средств управления, при этом в объем описанного изобретения входят другие конфигурации. Элементы привода на ведущие колеса и управляющие устройства описанного выше типа известны из уровня техники и более подробно рассмотрены в упомянутых выше патентах US 3478851; 3776048; 4038889; 4081065; 4226295 и 4361060.
Датчиками 22, 28, 33, 35, 38, 39 и 54 могут являться датчики любого известного типа или конструкции, способные генерировать аналоговые или цифровые сигналы, пропорциональные параметру, который они измеряют. Устройствами 26, 37, 50 и 52 могут являться электрические, пневматические или электропневматические устройства любого известного типа, способные выполнять операции в ответ на командные сигналы процессора 44, 56, 70 или 72.
В качестве основного назначения центральный процессор 56 в соответствии с программой (т.е. заданными логическими правилами) и с учетом текущих или хранящихся параметров выбирает, должен ли двигатель оставаться зацепленным или расцепленным с колесами в состоянии полного затормаживания колес и при необходимости передает команду такого зацепления/расцепления на основании текущей и(или) хранящейся информации.
В случае состояния полного затормаживания или блокирования колес важно, чтобы логическая схема управления системой АМТ имела способ обнаружения такого состояния, поскольку входной сигнал датчика 36, отображающий число оборотов выходного вала коробки передач, может не отображать подлинную скорость движения автомобиля, из-за чего система может пытаться осуществлять нежелательные переключения коробки 11 передач на более низкие передачи. Кроме того, в зависимости от конкретного рабочего состояния автомобиля, определенного с помощью датчиков 33, 35, 37 или 39, может быть желательным, чтобы двигатель 12 и сцепление 14 оставались связанными или не связанными с заторможенными ведущими колесами 60 автомобиля.
Определение действительного или приближающегося состояния полного затормаживания колес центральным процессором 56 АМТ является относительно простым и предпочтительно включает прием сигнала от антиблокировочной системы 42 автомобиля. После обнаружения состояния блокировки или полного затормаживания колес необходимо, чтобы система 10 прореагировала на определенное состояние максимально надежным способом. Если она еще не сделала этого, сначала определяют рабочее состояние автомобиля в соответствии с логикой действий или способом управления системой 10 АМТ в ответ на определение состояния блокировки. Иными словами, определяют, спускается ли автомобиль по крутому склону или движется по относительно ровной дороге, перевозит ли автомобиль тяжелый или легкий груз, имеется ли доступная эффективная тормозная мощность двигателя или определяют конфигурацию автомобиля (имеет ли автомобиль колесную формулу 2Х4, 2Х6 и т.д.) и т.п. 3атем в зависимости от рабочего состояния автомобиля сцепление 14 может оставаться включенным (например, в случае крутого спуска) или выключенным в зависимости от реальной ситуации. При включенном сцеплении обычно можно продолжать использовать преимущества тормоза двигателя и(или) инерции двигателя автомобиля и предотвращать крен, который может возникать, если бы сцепление было выключено. В качестве альтернативы при движении по ровной поверхности выключение сцепления позволяет водителю выйти из затруднения в связи с блокированием колес без необходимости преодолевать крутящий момент двигателя или беспокоиться о том, что система 10 передачи переключится на более низкую передачу при блокировании колес. Это может быть важно, поскольку выключение сцепления 14 позволяет заторможенным колесам 60 вращаться со скоростью движения автомобиля без помех из-за инерции двигателя 12 и входных дисков сцепления 14. В качестве альтернативы, если ЦП определяет, что в результате торможения двигателем (что бывает на обледеневшей или мокрой дороге) произошло полное торможение колес, может использоваться переключатель 37 тормоза двигателя для предотвращения дальнейшего полного затормаживания колес и регулировки тормозной системы двигателя для предотвращения дальнейшего полного затормаживания колес.
Хотя система 10 АМТ описана как система, в которой используют микропроцессорный центральный процессор 56, а способы и операции осуществляют с помощью программных средств или алгоритмов, операции также могут выполняться на базе электронных/струйных логических схем, представляющих собой дискретные компоненты аппаратных средств.
На фиг.2 в целом проиллюстрирован способ избирательного отключения привода автомобиля на ведущие колеса автомобиля в случае состояния полного затормаживания колес. При осуществлении способа определяют, присутствует ли состояние полного затормаживания колес (шаг 105), и сохраняют текущее состояние (шаг 115), если не обнаружено полное затормаживание колес, или определяют рабочее состояние (шаг 110), если присутствует состояние полного затормаживания колес. Как можно видеть, если присутствует состояние полного затормаживания колес (шаг 105), центральный процессор определяет рабочее состояние автомобиля (шаг 110), то есть спускается ли автомобиль по крутому склону, перевозит ли автомобиль тяжелый груз, имеет ли автомобиль тормозную мощность двигателя, или определяет конфигурацию автомобиля. На основании данных, передаваемых датчиками, ЦП передает регуляторам команду выключить привод на ведущие колеса (шаг 120) или оставить включенным привод на ведущие колеса (шаг 125). Если привод на ведущие колеса выключен, он может оставаться выключенным до тех пор, пока не прекратится состояние полного затормаживания колес и сцепление снова не будет включено (шаг 130). В качестве альтернативы, если центральный процессор определяет, что условия позволяют оставить включенным привод на ведущие колеса, осуществляют процедуру определения причины состояния полного затормаживания колес (например, торможение двигателем или скользкая поверхность). Если установлено, что причиной полного затормаживания колес является торможение двигателем, ЦП передает регулятору команду изменить усилие торможения двигателем. После прекращения состояния полного затормаживания колес может быть возобновлена нормальная работа (шаг 130).
Когда определяют, следует ли отключить сцепление или оставить его включенным, может использоваться сочетание различных рабочих условий или определяющим фактором может быть единственное преобладающе рабочее условие. По меньшей мере в одном из вариантов осуществления в качестве определяющего фактора использую угол уклона. Если угол уклона меньше первого заданного значения, сцепление и привод на ведущие колеса остаются включенными. Однако, если автомобиль движется по нисходящему уклону, превышающему первое заданное значение, сцепление не будет выключено. Вместе с тем, чтобы определить, когда отключать сцепление, в предпочтительном варианте осуществления используют угол уклона и число оборотов двигателя. Пока число оборотов двигателя превышает заданное значение, а угол уклона превышает первое заданное значение, сцепление будет оставаться включенным. Когда число оборотов двигателя падает ниже первого заданного значения, сцепление выключается. Основной причиной выключения сцепления в этот момент является предотвращение остановки двигателя. Когда угол уклона превышает второе заданное значение, которое больше первого заданного значения, сцепление будет оставаться включенным до тех пор, пока число оборотов двигателя не упадет ниже второго заданного значения. Однако если угол уклона превышает третье заданное значение, сцепление будет оставаться включенным. Далее приведен пример этой логической схемы. Если автомобиль движется по дороге с уклоном меньше пяти процентов, при обнаружении состояния полного затормаживания колес сцепление выключится. Если уклон превышает пять процентов, дополнительно принимают во внимание число оборотов двигателя. Если число оборотов двигателя остается выше определенного значения, такого как 1800 оборотов в минуту, сцепление будет оставаться включенным; если число оборотов двигателя падает ниже второго заданного значения, равного 1600 оборотам в минуту, сцепление выключится. Когда уклон превышает третье заданное значение, например восемь процентов, сцепление будет оставаться включенным.
В соответствии с описанием в настоящем изобретении предложены устройство и способ избирательного отключения привода на ведущие колеса автомобиля в случае состояния полного затормаживания колес. Для специалистов в данной области техники должно быть ясно, что, хотя настоящее изобретение проиллюстрировано и описано на примере вариантов осуществления, считающихся типичными и предпочтительными, в него могут быть внесены различные изменения и усовершенствования, не выходящие за пределы существа и объема изобретения. Таким образом, подразумевается, что настоящее изобретение ограничено не описанными частными вариантами осуществления, а объемом патентных притязаний формулы изобретения.
Изобретение относится к тормозным системам. Устройство содержит логическое управляющее устройство, первый и второй датчик. Первый датчик определяет первое заданное рабочее состояние транспортного средства. Второй датчик определяет состояние полного затормаживания колес. Логическое управляющее устройство передает команду подключения или отключения привода на ведущие колеса. Способ заключается в том, что отключают привод на ведущие колеса, если логическое управляющее устройство получило сигнал о первом заданном рабочем состоянии транспортного средства и состоянии полного затормаживания колес. Оставляют включенным привод на ведущие колеса, если логическое управляющее устройство получило сигнал о втором заданном рабочем состоянии транспортного средства и состоянии полного затормаживания колес. Технический результат заключается в возможности избирательного расцепления двигателя и колес транспортного средства в условиях полного затормаживания колес. 2 н. и 15 з.п.п. ф-лы, 2 ил.
1. Способ избирательного отключения привода на ведущие колеса (60) транспортного средства, снабженного автоматической механической системой (10) передач и антиблокировочной тормозной системой (42), при осуществлении которого определяют по меньшей мере одно рабочее состояние транспортного средства (шаг 110), определяют состояние полного затормаживания колес транспортного средства (шаг 105), передают сигналы о рабочем состоянии и состоянии полного затормаживания колес транспортного средства логическому управляющему устройству, отличающийся тем, что отключают привод на ведущие колеса (60), если логическое управляющее устройство получило сигнал о первом заданном рабочем состоянии транспортного средства и состоянии полного затормаживания колес (шаг 120), и оставляют включенным привод на ведущие колеса (60), если логическое управляющее устройство получило сигнал о втором заданном рабочем состоянии транспортного средства и состоянии полного затормаживания колес (шаг 125).
2. Способ по п.1, отличающийся тем, что второе заданное рабочее состояние транспортного средства соответствует углу уклона транспортного средства.
3. Способ по п.2, отличающийся тем, что упомянутый угол уклона превышает заданный угол.
4. Способ по п.3, отличающийся тем, что упомянутый заданный угол равен трем градусам.
5. Способ по п.3, отличающийся тем, что упомянутый заданный угол равен пяти градусам.
6. Способ по п.1, отличающийся тем, что второе заданное рабочее состояние транспортного средства соответствует углу уклона транспортного средства и числу оборотов его двигателя (12).
7. Способ по п.6, отличающийся тем, что упомянутый угол уклона превышает заданный угол.
8. Способ по п.6, отличающийся тем, что упомянутое число оборотов двигателя превышает заданное значение.
9. Способ по п.8, отличающийся тем, что упомянутое заданное значение числа оборотов двигателя (12) соответствует критическому значению.
10. Способ по п.1, отличающийся тем, что первое заданное рабочее состояние транспортного средства соответствует движению преимущественно по ровной поверхности.
11. Способ по п.1, отличающийся тем, что для определения рабочего состояния используют массу транспортного средства.
12. Способ по п.1, отличающийся тем, что для определения рабочего состояния используют угол уклона транспортного средства.
13. Способ по п.1, отличающийся тем, что для определения рабочего состояния используют тормозное усилие двигателя.
14. Способ по п.1, отличающийся тем, что для определения рабочего состояния используют конфигурацию транспортного средства.
15. Способ по п.14, отличающийся тем, что к конфигурации транспортного средства относится число ведущих колес (60) из общего числа колес.
16. Устройство для избирательного отключения привода на ведущие колеса (60) транспортного средства, снабженного автоматической механической системой передач и антиблокировочной тормозной системой, включающее первый датчик (33, 35, 37, 39) для определения по меньшей мере одного рабочего состояния транспортного средства, второй датчик (54) для определения состояния полного затормаживания колес транспортного средства, логическое управляющее устройство (56, 70, 72), отличающееся тем, что логическое управляющее устройство (56, 70, 72) способно принимать сигналы первого (33, 35, 37, 39) и второго датчиков (54) и передавать команду на отключение привода на ведущие колеса (60), если по меньшей мере первый датчик (33, 35, 37, 39) определяет первое заданное рабочее состояние транспортного средства, а второй датчик (54) определяет состояние полного затормаживания колес, и логическое управляющее устройство (56, 70, 72) способно передавать команду подключения привода на ведущие колеса, если обнаружено второе заданное рабочее состояние транспортного средства и состояние полного затормаживания колес.
17. Устройство по п.16, отличающееся тем, что второе заданное рабочее состояние транспортного средства соответствует углу уклона транспортного средства.
| US 2004140174 A1, 22.07.2004 | |||
| Ручной пневморычажный клепальный пресс | 1980 |
|
SU889263A1 |
| US 6446024 B1, 03.09.2002 | |||
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2103191C1 |

