Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и системе автоматического ограничения скорости транспортного средства при движении в режиме свободного хода.
Настоящее изобретение также относится к компьютерной программе для выполнения такого способа при помощи компьютера.
Описание известного уровня техники
Автомобили для тяжелых условий эксплуатации все чаще оснащают автоматическими коробками передач многоступенчатого типа, что стало возможным с развитием микрокомпьютерной технологии, позволившей при помощи управляющего компьютера и нескольких элементов управления, например серводвигателей, точно регулировать число оборотов двигателя, включение и выключение автоматического сцепления двигателя и коробки передач и соединительных элементов коробки передач и за этот счет всегда обеспечивать плавное переключение на передачу с верной частотой вращения. Преимуществом коробки передач данного типа по сравнению с традиционной автоматической коробкой передач с планетарными зубчатыми переборами и гидродинамическим трансформатором на входе является, во-первых, ее простота и прочность и существенно меньшая стоимость изготовления, чем у традиционной автоматической коробки передач, и, во-вторых, более высокий кпд, что предполагает меньший расход топлива.
У автоматической коробки передач с планетарным зубчатым механизмом между планетарными зубчатыми переборами обычно предусмотрены однонаправленные зубчатые муфты, которые в процессе работы двигателя фиксируются в положении автоматической передачи крутящего момента от двигателя ведущим колесам, но выключаются при передаче крутящего момента в противоположном направлении, т.е. при нулевом газе и находящемся в движении транспортном средстве, в результате чего транспортное средство переходит в режим свободного хода без торможения двигателем, что за счет использования кинетической энергии транспортного средства обеспечивает меньший расход топлива, чем при использовании двигателя для торможения.
Соответствующая функция свободного хода у многоступенчатых автоматических коробок передач описана в заявке WO 02/092378. В данном случае с целью обеспечения функции свободного хода раздаточную зубчатую передачу коробки передач устанавливают в выключенное положение, когда угол наклона педали газа находится в заданном диапазоне, который начинается на определенном расстоянии от исходного положения педали газа и проходит на протяжении небольшой части полного диапазона углов наклона педали газа. При желании перейти от режима рабочего хода к режиму свободного хода без торможения двигателем водитель отпускает педаль газа, чтобы она оказалась в заданном диапазоне в отсутствии привода от двигателя. При необходимости торможения двигателем водитель еще больше отпускает педаль газа до конца или до такой степени, когда она выйдет из заданного диапазона, в котором происходит выключение сцепления. В случае использования технологии свободного хода, предложенной в заявке WO 02/092378, скорость транспортного средства в режиме свободного хода может иногда чрезмерно увеличиваться. При этом водитель транспортного средства снижает скорость, приводя в действие ножной тормоз и/или вспомогательный тормоз транспортного средства. Это делается вручную, в результате чего движение происходит отчасти толчками.
Соответственно, в основу настоящего изобретения положена задача создания у транспортного средства с многоступенчатой автоматической коробкой передач автоматической функции свободного хода, снижающей риск вождения с чрезмерно высокой скоростью и повышающей удобство вождения, а также одновременно обеспечивающей возможность сокращения расхода топлива.
Краткое изложение сущности изобретения
Решение данной задачи достигнуто за счет предложенного в изобретении способа по п.1 формулы изобретения и предложенной в изобретении системы по пп.4 и 8 формулы изобретения. Зависимые пункты 2 и 3 и 5-7 и 9 формулы изобретения относятся к предпочтительным вариантам осуществления и усовершенствованиям предложенных в изобретении способа и системы, соответственно. Пункты 10-12 формулы изобретения относятся к компьютерным программным продуктам, которые включают программный код согласно способу по п.1 формулы изобретения.
В изобретении предложен способ автоматического переключения режима свободного хода транспортного средства. Транспортное средство имеет средство снижения скорости, по меньшей мере один двигатель, по меньшей мере одно колесо, приводимое двигателем посредством многоступенчатой автоматической коробки передач, педаль газа для регулирования крутящего момента двигателя. Режим свободного хода приводится в действие автоматически при наличии входных сигналов, указывающих скорость транспортного средства и положение педали газа в заданном диапазоне углов наклона педали газа, которое начинается на определенном расстоянии от исходного положения педали газа и проходит на протяжении небольшой части полного диапазона углов наклона педали газа. Способ включает шаги, на которых:
- выключают приведенную в действие функцию свободного хода в случае превышения транспортным средством установленной предельной скорости,
- при помощи средства снижения скорости осуществляют автоматическое торможение транспортного средства и, затем,
- повторно приводят в действие функцию свободного хода после того, как снижающаяся скорость транспортного средства приблизилась и/или сравнялась с установленной предельной скоростью.
Преимуществом предложенного в изобретении способа является автоматическое ограничение скорости транспортного средства, а также автоматическое приведение в действие функции свободного хода и ее выключение в зависимости от обстоятельств. Предложенная в изобретении функция встроена в функцию свободного хода. Водителю обеспечиваются более непринужденные и комфортабельные условия вождения. За счет того, что в настоящем изобретении ограничено приведение в действие функции свободного хода вручную, обеспечивается экономичный расход топлива и другие выгоды функции свободного хода.
В одном из вариантов осуществления предложенного в изобретении способа предельную скорость транспортного средства предварительно устанавливают в зависимости по меньшей мере от преобладающего угла уклона участка пути, на котором находится транспортное средство. В таком случае предельная скорость транспортного средства может быть выбрана применительно к различным углам уклона, чтобы более эффективно осуществлять функцию свободного хода и последующее торможение.
В дополнительном варианте осуществления предложенного в изобретении способа устанавливают, что идущий под гору участок пути, по которому перемещается транспортное средство, в скором времени заканчивается. Это может быть сделано при помощи, например, глобальной системы определения координат, установленной на транспортном средстве. В качестве альтернативы может применяться прогнозирование методом экстраполяции рельефа местности, по которому будет перемещаться транспортное средство. Если установлено, что идущий под гору участок пути в скором времени заканчивается, функцию свободного хода повторно приводят в действие за некоторое время до того, как скорость транспортного средства упадет ниже предельной скорости. Упомянутое время зависит по меньшей мере от того, когда по расчетам должен закончиться такой идущий под гору участок.
В рассматриваемом варианте осуществления время действия функции свободного хода может быть дополнительно продлено и, следовательно, обеспечено дополнительное сокращение расхода топлива. Если заранее известно, что идущий под гору участок пути в скором времени заканчивается, и что после этого скорость транспортного средства без активного торможения упадет ниже предельной скорости, допускается разумное превышение установленной предельной скорости в процессе движения в режиме свободного хода. Таким образом, в определенных ситуациях движения в режиме свободного хода может быть продолжено вопреки тому факту, что скорость транспортного средства незначительно превышает установленную предельную скорость.
В изобретении также предложена система автоматического переключения режима свободного хода транспортного средства, оснащенного блоком управления, который после приведения в действие функции свободного хода и при наличии входного сигнала, указывающего, что превышена заданная для транспортного средства предельная скорость, автоматически выключает функцию свободного хода и осуществляет торможение транспортного средства при помощи средства снижения скорости, при этом при наличии входного сигнала, указывающего, что скорость транспортного средства снизилась, упомянутый блок управления повторно приводит в действие функцию свободного хода, чтобы приблизить скорость к заданной предельной скорости транспортного средства.
Предложенная в изобретении система обеспечивает такие же преимущества, как и предложенный в изобретении способ.
В одном из вариантов осуществления системы, предложенной в изобретении, с блоком управления соединена система установления заданной предельной скорости транспортного средства. За счет этого может быть выбрана скорость транспортного средства, превышение которой вызовет автоматическое выключение режима свободного хода. Устройство установления заданной предельной скорости транспортного средства может включать органы управления, расположенные на приборной панели. В дополнительном варианте осуществления предложенной в изобретении системы предельную скорость транспортного средства задают в зависимости по меньшей мере от преобладающего угла уклона участка пути, на котором находится транспортное средство. В таком случае предельная скорость транспортного средства может быть автоматически скорректирована устройством установления предельной скорости транспортного средства.
В дополнительном варианте осуществления предложенной в изобретении системы предусмотрен блок управления, который по меньшей мере на основании получаемой в процессе движения информации о текущей скорости транспортного средства, угле уклона пути и положении педали газа непрерывно осуществляет моделирование данных применительно к будущему движению транспортного средства с целью оптимизации автоматического включения и выключения режима свободного хода с учетом выбранного критерия. Выбранным критерием могут являться требования в повышении комфорта и/или снижении расхода топлива. Предложенная в изобретении система согласно рассматриваемому варианту осуществления позволяет в большей степени учитывать будущий рельеф местности, чтобы лучше управлять функцией свободного хода. За этот счет может быть дополнительно оптимизировано включение и выключение функции свободного хода с последующим снижением скорости.
Другие дополнительные варианты осуществления изобретения могут быть выведены из зависимых пунктов формулы изобретения.
Краткое описание чертежей
Настоящее изобретение более подробно описано ниже со ссылкой на приложенные чертежи, на которых:
на фиг.1 и 3 схематически представлены варианты осуществления устройства, автоматически ограничивающего скорость транспортного средства в режиме свободного хода согласно изобретению,
на фиг.2 представлена блок-схема управления согласно одному из вариантов осуществления изобретения.
Предпочтительные варианты осуществления
На фиг.1 показан шестицилиндровый двигатель внутреннего сгорания, например дизельный двигатель, обозначенный позицией 1, коленчатый вал 2, соединенный с сухим однодисковым сцеплением, в целом обозначенным позицией 3, которое помещается в корпусе 4 муфты сцепления. Коленчатый вал 2 неподвижно соединен с входным валом 7, который с возможностью вращения установлен в картере 8 коробки передач, в целом обозначенной позицией 9. В корпусе 8 с возможностью вращения также установлен вторичный вал 10 и промежуточный вал 11. На входном валу 7 с возможностью вращения установлена зубчатая передача, которая может быть зафиксирована на валу при помощи синхронизирующего устройства, снабженного соединительной муфтой, установленной без возможности вращения, но с возможностью осевого смещения на втулке, неподвижно соединенной с валом, отводящим мощность. При помощи упомянутой соединительной муфты относительно входного вала 7 может быть зафиксирована зубчатая передача, с возможностью вращения установленная на вторичном валу 10. При нахождении упомянутой соединительной муфты в среднем положении обе зубчатые передачи расцепляются с соответствующими валами 7 и 10. Упомянутые зубчатые передачи вместе с синхронизирующим устройством и соединительной муфтой образуют раздаточную зубчатую передачу.
На промежуточном валу неподвижно закреплены дополнительные зубчатые передачи, каждая из которых входит в зацепление с соответствующей зубчатой передачей, с возможностью вращения установленных на вторичном валу 10 и фиксируемых на вторичном валу при помощи дополнительных соединительных муфт, которые в проиллюстрированном варианте осуществления не имеют синхронизирующих устройств. В проиллюстрированном варианте осуществления выходной конец вторичного вала также оснащен зубчатым перебором передач планетарного типа.
Все соединительные муфты способны смещаться при помощи сервоэлементов (не показаны), которые могут представлять собой устройства по типу пневматических цилиндров, применяемых в передаче описанного выше типа, выпускаемой по маркой "I-shift".
Электронный блок 45 управления, включающий микрокомпьютер, управляет сервоэлементами в зависимости от поступающих в блок управления сигналов, отображающих различные параметры двигателя и транспортного средства, которые включают как минимум число оборотов двигателя, скорость транспортного средства, положение педали 48 газа транспортного средства и, если это применимо, включение-выключение тормоза двигателя, когда электронный переключатель 46 передач, соединенный с блоком 45 управления, находится в положении автоматического переключения передачи. Данные о положении педали газа получают от датчика 49 угла, который согласован с рычагом 51 педали, установленным с возможностью поворота на валике 50 педали 48 газа. Когда переключатель 46 находится в положении ручного переключения передачи, переключение передачи осуществляется по команде водителя при помощи переключателя 46. Блок 45 управления также регулирует впрыскивание топлива, т.е. число оборотов двигателя в зависимости от положения педали газа и подачи воздуха в пневматический цилиндр 47, с которым расцеплено сцепление 3.
Блок 45 управления запрограммирован таким образом, что функция свободного хода приводится в действие, когда водитель в процессе движения транспортного средства и возможном тормозе двигателя, например регуляторе выхлопа или компрессионном тормозе, оставляет педаль 48 газа в положении в пределах заданного диапазона α углов наклона рычага 51 педали, как это проиллюстрировано на фиг.1, где γ означает полный угол наклона рычага 51 педали, а β означает заданный диапазон углов, в котором отсутствует впрыскивание топлива, но не происходит расцепление, и поэтому возможно торможение двигателем. В проиллюстрированном варианте осуществления углы наклона α и β составляют около 5° каждый в полном диапазоне углов наклона рычага 51 педали, равном около 30°, но, если это приемлемо, угол β может быть выбран равным 0°. Это означает, что, когда педаль газа находится в положении примерно на 5° ниже ее нерабочего исходного положения, блок 45 управления, прежде всего регулирующий число оборотов двигателя, приводит в действие функцию свободного хода, в результате чего не происходит передача крутящего момента от входного вала 7 коробки передач вторичному валу 10. Затем блок 45 управления передает сигнал сервоэлементу, и за счет смещения соединительной муфты раздаточной зубчатой передачи в нейтральное положение происходит расцепление входного вала 7 и промежуточного вала 11, после чего двигатель переходит на режим оборотов холостого хода. При этом карданная передача разъединена, и транспортное средство может двигаться в режиме свободного хода. Таким образом, функция свободного хода в данном случае обеспечивается за счет расцепления синхронизированной раздаточной зубчатой передачи. Для обеспечения функции свободного хода также могут использоваться другие средства расцепления двигателя и ведущих колес транспортного средства.
Согласно настоящему изобретению блок 45 управления запрограммирован таким образом, что функция свободного хода автоматически выключается, если скорость транспортного средства превысит заданную предельную скорость Vmax. В проиллюстрированном на фиг.1 варианте осуществления показано устройство установления заданной предельной скорости Vmax, которое обозначено позицией 47. Данное устройство может представлять собой отдельный орган управления с выбираемыми уровнями скорости на приборной панели транспортного средства; в качестве альтернативы устройство 47 может быть реализовано в виде выбираемой функции установки в системе меню, например в бортовом компьютере транспортного средства. В одном из вариантов осуществления изобретения устройство 47 может представлять собой блок, который автоматически задает скорость Vmax в зависимости от угла уклона участка пути, на котором находится или будет находиться (значение оборота "будет находиться" более подробно пояснено ниже) транспортное средство. Различные приспособления для измерения угла уклона известны как таковые.
На фиг.2, на которой графически представлена блок-схема 20, более подробно показаны различные шаги управления, осуществляемые блоком 45 управления согласно одному из вариантов осуществления изобретения. На шаге 21 блок 45 управления определяет, находится ли рычаг 51 педали газа в диапазоне α углов наклона. Если установлено, что рычаг 51 педали находится вне диапазона α углов наклона, функция свободного хода не приводится в действие. Блок 45 управления непрерывно определяет положение рычага 51 педали. Если установлено, что рычаг 51 педали находится в диапазоне α углов наклона, функция свободного хода приводится в действие путем, например, упомянутого расцепления раздаточной зубчатой передачи. Это происходит на шаге 22. Если функция свободного хода приведена в действие, на шаге 23 сравнивают текущую скорость v транспортного средства с заданной скоростью Vmax. В рассматриваемом варианте осуществления блок 45 управления непрерывно осуществляет данное сравнение до тех пор, пока действует функция свободного хода. Согласно варианту осуществления, проиллюстрированному на фиг.2, на шаге 24 блок 45 управления отключает функцию свободного хода, если текущая скорость v транспортного средства превышает заданную скорость Vmax, после чего на шаге 25 блок 45 управления осуществляет торможение транспортного средства, например, приводя в действие тормозную систему (не показана) транспортного средства. Тормозная система может включать ножной тормоз и/или вспомогательный тормоз транспортного средства, при этом вспомогательный тормоз может представлять собой компрессионный тормоз, находящийся в двигателе, или тормоз-замедлитель (горный тормоз), установленный на выхлопной трубе. В качестве альтернативы или дополнительно может осуществляться торможение транспортного средства двигателем, т.е. при помощи собственного трения двигателя 1. В прилагаемой формуле изобретения термин "средство снижения скорости" включает по меньшей мере одно из следующих средств: двигатель, используемый как тормоз (за счет собственного трения двигателя), ножной тормоз и вспомогательный тормоз. Торможение двигателем за счет собственного трения двигателя может осуществляться в тех ситуациях, когда считается достаточным усилие торможения, создаваемого собственным трением двигателя. В данном случае блок управления выбирает в коробке передач 9 передачу, рассчитанную на усилие торможения. При выключении функции свободного хода блок 45 управления, прежде всего, доводит число оборотов двигателя до частоты вращения, позволяющей осуществить синхронизацию, после чего происходит повторный ввод в зацепление ранее расцепленной передачи. При этом происходит повторное включение карданной передачи, и снова становится возможным торможение двигателем или привод от двигателя. На шаге 26 блок 45 управления сравнивает текущую скорость V транспортного средства с заданной скоростью Vmax, на шаге 27 блок 45 управления завершает торможение, если блок 45 управления установил, что средство снижения скорости снизило скорость v транспортного средства до уровня ниже Vmax. По завершении торможения транспортного средства программа 20 переходит к шагу 28 возврата.
Далее, согласно изобретению, может быть установлено, что идущий под гору участок пути, по которому перемещается транспортное средство, в скором времени заканчивается. Это предпочтительно может быть сделано посредством блока 45 управления при помощи, например, GPS (глобальной системы определения координат), установленной на транспортном средстве. При помощи GPS и электронных карт из навигационной системы транспортного средства блок 45 управления получает информацию о текущем положении транспортного средства и рельефе окружающей местности. Блок 45 управления непрерывно регистрирует будущий рельеф местности на протяжении времени, когда выключена функция свободного хода. Как только блок 45 управления обнаружит, что идущий под гору участок пути в скором времени заканчивается, функция свободного хода снова приводится в действие за некоторое время до того, как скорость транспортного средства упадет ниже предельной скорости Vmax, т.е. когда текущая скорость v близка и несколько выше заданной предельной скорости Vmax. Упомянутое время до того, как скорость транспортного средства упадет ниже скорости Vmax, зависит от того, когда по расчетам должен закончиться идущий под гору участок пути. Это может быть вычислено при условии известной текущей скорости v транспортного средства, ожидаемого уменьшения скорости и будущего рельефа местности. В предпочтительном варианте осуществления блок 45 управления учитывает, каким является рельеф местности после завершения идущего под гору участка, т.е. следует ли за ним участок, идущий в гору с определенным углом уклона, или приблизительно ровный участок. За счет моделирования, осуществляемого в блоке 45 управления, может быть выбрано, например, наиболее оптимальное с точки зрения расхода топлива регулирование функции свободного хода.
В дополнительном предпочтительном варианте осуществления система включает верхнюю абсолютную максимальную скорость, которая несколько превышает Vmax и которую автоматическая система управления безусловно запрещает превышать транспортному средству вопреки, например, тому, что по результатам моделирования установлено, что с точки зрения экономии топлива целесообразно максимально использовать тот факт, что идущий под гору участок скоро закончится, а за ним следует достаточно крутой подъем, чтобы транспортное средство затормозило, и его скорость снизилась до уровня ниже Vmax. По соображениям безопасности упомянутая абсолютная максимальная скорость должна быть установлена при изготовлении (на заводе).
В дополнительном предпочтительном варианте осуществления блок 45 управления непрерывно контролирует будущий рельеф местности как при выключенной, так и включенной функции свободного хода. Таким образом, блок 45 управления может разрешать увеличение скорости v до уровня между Vmax и упомянутой абсолютной максимальной скорости без выключения функции свободного хода или торможения транспортного средства при помощи тормозной системы (или просто торможения двигателем) при условии, что блок 45 управления установил, что идущий под гору участок скоро закончится, и, следовательно, скорость транспортного средства по расчетам останется ниже упомянутой абсолютной максимальной скорости. В целом, это может дополнительно способствовать экономии топлива.
Если устройство 47 автоматически определяет скорость Vmax в зависимости от угла уклона идущего под гору участка пути, на котором находится транспортное средство, то определение Vmax в данном случае может составлять часть непрерывного моделирования, т.е. определение момента выключения функции свободного хода и возможного повторного включения осуществляется непрерывно и в зависимости от текущего состояния транспортного средства и будущего рельефа местности.
В упомянутых вариантах осуществления во внимание принимался лишь угол уклона участка пути, по которому перемещается транспортное средство. Вместе с тем, на увеличение и снижение скорости транспортного средства также влияет сопротивление качению и сопротивление воздуха. В целом, угол уклона пути, сопротивление качению и сопротивление воздуха называют сопротивлением дороги. В дополнительном варианте осуществления изобретения автоматическое определение
Vmax и/или моделирование осуществляют в зависимости от текущего, а в некоторых реальных вариантах осуществления также будущего сопротивления дороги транспортному средству.
На фиг.3 показано устройство 500 согласно одному из вариантов осуществления изобретения, которое включает энергонезависимую память 520, процессор 510 и память 560 с возможностью считывания и перезаписи. Память 520 имеет первую область 530, в которой хранится компьютерная программа управления устройством 500. Хранящаяся в области 530 памяти компьютерная программа управления устройством 500 может являться операционной системой.
Устройство 500 может помещаться, например, в блоке управления, таком как блок 45 управления. Блок 510 обработки данных может представлять собой, например, микрокомпьютер.
Память 520 также имеет вторую область 540, в которой хранится программа управления функцией свободного хода согласно изобретению. В альтернативном варианте осуществления программа управления функцией свободного хода хранится на отдельном энергонезависимом носителе информации 550, таком как, например, компакт-диск или полупроводниковое запоминающее устройство со сменными дисками. Программа может храниться в виде выполняемой версии или в сжатом состоянии.
Если ниже указано, что блок 510 обработки данных выполняет особую функцию, должно быть ясно, что блок 510 обработки данных выполняет определенную часть программы, хранящейся в памяти 540, или определенную часть программы, хранящейся на энергонезависимом носителе информации 550.
Блок 510 обработки данных рассчитан на обмен данными с носителем информации 550 посредством шины 514 передачи данных. Блок 510 обработки данных также рассчитан на обмен данными с памятью 520 посредством шины 512 передачи данных. Кроме того, блок 510 обработки данных рассчитан на обмен данными с памятью 560 посредством шины 511 передачи данных. Блок 510 обработки данных также рассчитан на обмен данными с портом 590 передачи данных при помощи шины 515 передачи данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 510 обработки данных, выполняющим программу, хранящуюся в памяти 540, или программу, хранящуюся на энергонезависимом носителе информации 550.
Изобретение не ограничивается иллюстрирующими его вариантами осуществления, которые описаны выше, и в нем могут быть предусмотрены различные дополнительные варианты и усовершенствования, не выходящие за объем заявляемых далее патентных притязаний.
Изобретение относится к способу и системе автоматического ограничения скорости транспортного средства при движении в режиме свободного хода. Способ автоматического переключения режима свободного хода транспортного средства, имеющего средство снижения скорости, двигатель (1) для привода колес через многоступенчатую автоматическую коробку передач (9), педаль (48) газа для регулирования крутящего момента двигателя и блок (45) управления. После приведения в действие функции свободного хода и при наличии входного сигнала, указывающего, что превышена заданная для транспортного средства предельная скорость, блок (45) управления автоматически выключает функцию свободного хода и осуществляет торможение транспортного средства при помощи средства снижения скорости. При наличии входного сигнала, указывающего, что скорость транспортного средства снизилась близко к заданной предельной скорости транспортного средства, блок (45) управления повторно приводит в действие функцию свободного хода. В одном из вариантов осуществления моделируют будущее перемещение транспортного средства с целью оптимизации функции свободного хода с точки зрения снижении расхода топлива и/или повышении комфорта управления. Это позволяет сократить расход топлива и повысить удобство вождения. 3 н. и 6 з.п. ф-лы, 3 ил.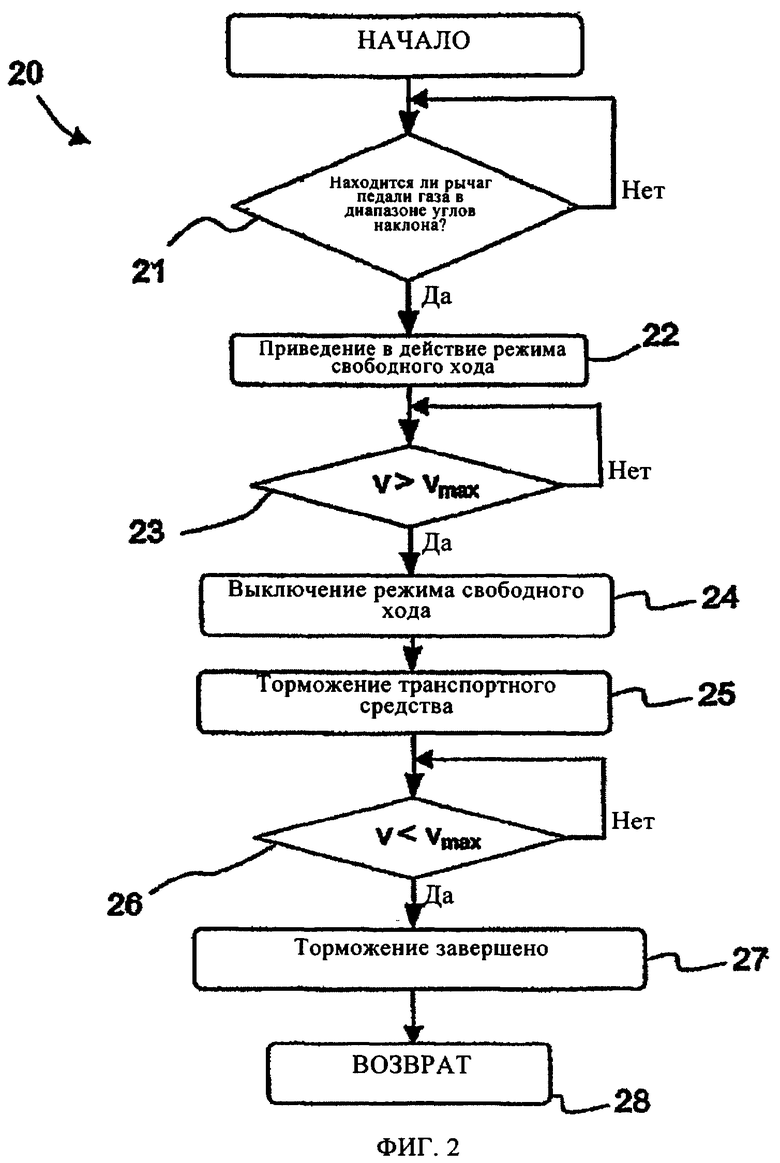
1. Способ автоматического переключения режима свободного хода транспортного средства, имеющего средство снижения скорости, по меньшей мере один двигатель (1), служащий приводом по меньшей мере одного колеса через многоступенчатую автоматическую коробку передач (9), педаль (48) газа для регулирования крутящего момента двигателя, при этом режим свободного хода приводится в действие автоматически при наличии входных сигналов, указывающих скорость (v) транспортного средства и положение педали газа в заданном диапазоне (α) углов наклона педали газа, который начинается на определенном расстоянии от исходного положения педали газа и проходит на протяжении небольшой части полного диапазона (γ) углов наклона педали газа, причем способ включает шаги, на которых выключают приведенную в действие функцию свободного хода в случае превышения транспортным средством установленной предельной скорости (vmax), осуществляют посредством средства снижения скорости автоматическое торможение транспортного средства, и, затем, повторно приводят в действие функцию свободного хода после того, как снижающаяся скорость (v) транспортного средства приблизилась и/или сравнялась с установленной предельной скоростью (vmax).
2. Способ по п.1, отличающийся тем, что предельную скорость (vmах) транспортного средства предварительно устанавливают в зависимости по меньшей мере от информации об угле уклона идущего под гору участка пути, на котором находится транспортное средство.
3. Способ по п.1, отличающийся тем, что дополнительно устанавливают, что идущий под гору участок пути, по которому перемещается транспортное средство, в скором времени заканчивается, повторно приводят в действие функцию свободного хода за некоторое время до того, как скорость транспортного средства упадет ниже предельной скорости (vmax), при этом упомянутое время зависит по меньшей мере от того, когда заканчивается упомянутый идущий под гору участок.
4. Система автоматического переключения режима свободного хода транспортного средства, имеющего средство снижения скорости, по меньшей мере один двигатель (1), служащий приводом по меньшей мере одного колеса через многоступенчатую автоматическую коробку передач (9), педаль (48) газа для регулирования крутящего момента двигателя и блок (45) управления, запрограммированный автоматически приводить в действие функцию свободного хода при наличии входного сигнала, указывающего скорость (v) транспортного средства и положение педали газа в заданном диапазоне (α) углов наклона педали газа, который начинается на определенном расстоянии от исходного положения педали газа и проходит на протяжении небольшой части полного диапазона (γ) углов наклона педали газа, отличающаяся тем, что блок (45) управления выполнен с возможностью, после приведения в действие функции свободного хода и при наличии входного сигнала, указывающего, что превышена заданная для транспортного средства предельная скорость (vmах), автоматического выключения функции свободного хода и осуществления торможения транспортного средства при помощи средства снижения скорости, и повторного приведения в действие функции свободного хода при наличии входного сигнала, указывающего, что снижающаяся скорость (v) транспортного средства приблизилась к заданной предельной скорости (vmax) транспортного средства.
5. Система по п.4, отличающаяся тем, что она включает устройство (47) установления заданной предельной скорости (vmax) транспортного средства, соединенное с блоком (45) управления.
6. Система по любому из предшествующих пунктов, отличающаяся тем, что устройство (47) установления заданной предельной скорости (vmax) транспортного средства, задает эту предельную скорость (vmax) транспортного средства в зависимости по меньшей мере от информации об угле уклона идущего под гору участка пути, на котором находится транспортное средство.
7. Система по п.4, отличающаяся тем, что средство снижения скорости включает по меньшей мере ножной тормоз и/или вспомогательный тормоз, установленные на транспортном средстве, и/или осуществляет торможение за счет собственного трения двигателя (1).
8. Система автоматического переключения режима свободного хода транспортного средства, имеющего средство снижения скорости, по меньшей мере один двигатель (1), служащий приводом по меньшей мере одного колеса через многоступенчатую автоматическую коробку передач (9), педаль (48) газа для регулирования крутящего момента двигателя и блок (45) управления, запрограммированный автоматически приводить в действие функцию свободного хода при наличии входного сигнала, указывающего скорость (v) транспортного средства и положение педали газа в заданном диапазоне (α) углов наклона педали газа, который начинается на определенном расстоянии от исходного положения педали газа и проходит на протяжении небольшой части полного диапазона (γ) углов наклона педали газа, отличающаяся тем, что блок (45) управления выполнен с возможностью, по меньшей мере на основании получаемой в процессе движения информации о скорости (v) транспортного средства, угле уклона пути и положении педали газа, непрерывно осуществлять моделирование данных применительно к будущему движению транспортного средства с целью оптимизации включения и выключения режима свободного хода с учетом выбранного критерия.
9. Система по п.8, отличающаяся тем, что выбранный критерий включает требования к повышению комфорта и/или снижению расхода топлива.
| ПРОТОЧНЫЙ ТРАКТ ВОДОМЕТНОГО ДВИЖИТЕЛЯ | 1992 |
|
RU2092378C1 |
| ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2037635C1 |
| RU 2001791 C1, 30.10.1993 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ВОЗДЕЙСТВИЯ НА СКОРОСТЬ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2136513C1 |
| Устройство для контроля движения транспортных средств | 1986 |
|
SU1411798A2 |

