Изобретение относится к тормозным системам транспортных средств и может быть использовано в автоматических устройствах управления транспортными средствами.
Известен способ обеспечения активной безопасности транспортных средств при движении в колонне, предусматривающий наличие системы, которая содержит две антенны, два модулятора, два усилителя мощности, смеситель, преобразователь частоты, детектор, первый и второй регистраторы скорости, регистратор дальности, вычислитель опасного расстояния по дальности, путевой скорости и скорости сближения, генератор непрерывных колебаний, сумматор, циркулятор, фильтр доплеровских частот, сравнитель. Система содержит схему управления положением антенны, первую исполнительную схему, выход которой соединен с источником звука, вторую исполнительную схему, выход которой связан с дроссельной заслонкой, третью исполнительную схему, выход которой соединен с блоком управления антиблокировочной системы рабочей тормозной системы транспортного средства, четвертую исполнительную схему, выход которой соединен со световой сигнализацией (см. патент РФ №2388057, МПК G08G 1/16 (опубл. 2010 г.).
Недостаток способа заключается в том, что при использовании блока управления антиблокировочной системы невозможно создать давления в контурах рабочей тормозной системы без нажатия водителем тормозной педали, что требуется при реализации автоматического торможения. Кроме того, не описан способ управления сцеплением при выполнении автоматического торможения, что необходимо при комплектации автомобиля механической коробкой передач. Если оставить сцепление включенным, то при реализации экстренного торможения двигатель может остановиться.
Известен способ, принятый в качестве прототипа, предназначенный для обнаружения экстренного торможения и распознавания следующего одного за другим торможения. Система торможения содержит гидравлический главный цилиндр, вакуумный тормозной усилитель, гидравлический контур, колесные тормоза, гидравлический блок с электронным управлением. Последний содержит средство для подачи тормозной жидкости под высоким давлением к колесным тормозам, электронное средство для выполнения операции экстренного торможения, средство для обнаружения близкого по времени повторения выполнения операций экстренного торможения и адаптирования условий для выполнения операций экстренного торможения. Устройство позволяет обнаруживать последовательное повторение во времени операций экстренного торможения и адаптировать условие экстренного торможения в случае последовательного повторения. Таким образом, с такого типа системой имеется возможность обнаруживать ситуацию близких по времени операций экстренного торможения, которая приводит к снижению поддержки торможения, оказываемой вакуумным тормозным усилителем, поскольку разность давлений между двумя камерами тормозного усилителя не имеет времени для того, чтобы вновь установиться вслед за этими операциями экстренного торможения. В известном способе после определения ситуации следующих одной за другой операций торможения условия для выполнения экстренного торможения затем адаптируют таким образом, чтобы сделать их менее ограничивающими, при этом ситуации экстренного торможения определяют только исходя из давления в главном цилиндре и градиента этого давления в главном цилиндре. В предпочтительном варианте выполнения для того, чтобы обнаруживать упомянутое близкое по времени повторение активации экстренного торможения, после первой операции экстренного торможения активируют систему отсчета времени, задавая период ее активации, и, пока упомянутая система отсчета времени активна, дают приращение счетчику экстренного торможения после каждой новой операции экстренного торможения, причем упомянутый счетчик повторно инициализируют, если система отсчета времени более не активна (см. патент РФ №2416537, МПК В60Т 8/32 (опубл. 2011 г.)
Недостатки этого способа следующие.
1. Отсутствует возможность управления сцеплением в автоматическом режиме, что не позволяет использовать данное изобретение для реализации экстренного торможения автомобиля до полной остановки без прекращения работы двигателя.
2. Отсутствует возможность поддержания безопасной дистанции до лидирующего автомобиля при изменении действительной дистанции до него, поскольку не предусмотрена возможность модулирования давлений в контурах тормозного привода.
3. Требуется использование средства для измерения давления, как минимум, в одном контуре тормозного привода, тем самым увеличивается стоимость устройства.
При создании универсальной системы автоматического торможения, в первую очередь, необходимо решить задачу создания давления в приводе без участия водителя, поскольку сигнал на включение режима автоматического торможения в основном приходит в момент, когда водитель не нажимает на тормозную педаль, так как он не может точно определить ни действительную, ни безопасную дистанцию до препятствия (лидирующего автомобиля). Частично эту задачу решают системы поддержания траектории (ESP, ESC и т.д.) и противобуксовочные системы (TCS). Когда электронный блок управления системы поддержания траектории обнаруживает опасность отклонения автомобиля от траектории, заданной ему водителем (на повороте), то в качестве воздействия на тормозную систему используется затормаживание одного колеса (когда водитель не нажимает на тормозную педаль). Когда электронный блок управления противобуксовочной системы обнаруживает буксование колеса (колес), на тормозную систему оказывается аналогичное воздействие.
Однако данный алгоритм нельзя использовать для создания универсальной системы автоматического торможения, поскольку торможение колес в указанных случаях прекращается при достижении определенной угловой скорости колеса. Так как датчики угловых скоростей колес не универсальны (в системах различных производителей используются различные сигналы), для создания универсальной системы автоматического торможения невозможно использовать алгоритмы существующих систем.
Технической задачей, решаемой предлагаемым изобретением, является возможность осуществления торможений с различной интенсивностью в автоматическом режиме за счет создания различных давлений в контурах тормозной системы и контуре гидравлического привода сцепления автомобилей любых производителей, имеющих механическую коробку передач, электрический привод дроссельной заслонки и гидравлические приводы тормозов и сцепления, по сигналу расчетно-логического блока.
Решение поставленной технической задачи достигается тем, что в способе управления гидравлическим тормозным приводом для обеспечения автоматического торможения автомобиля, оборудованного гидравлической тормозной системой, гидравлическим приводом сцепления, механической коробкой передач и электрическим приводом дроссельной заслонки, заключающемся в том, что при движении контролируют и регистрируют ряд измеряемых и расчетных параметров движения, по которым предварительно устанавливают критерии начала и окончания процесса автоматического торможения, при этом при наступлении режима автоматического торможения используют тормозную жидкость, находящуюся в главном тормозном цилиндре, и контуры гидроблоков управления тормозными механизмами передних и задних колес, при сохранении работоспособности антиблокировочной системы, согласно изобретению в процессе автоматического торможения дополнительно осуществляют управление сцеплением автомобиля с помощью независимого гидроблока с одним контуром, при этом реализуют замедление заданного значения, для чего устанавливают время работы электромоторов и запитывания аккумуляторных электромагнитных клапанов раздельно для гидроблоков управления тормозными механизмами и сцеплением, исходя из расчета необходимых давлений в каждом контуре гидроблоков, управляя при этом отсечными и аккумуляторными электромагнитными клапанами в соответствующих контурах.
Решение поставленной технической задачи достигается и тем, что в процессе автоматического торможения для поддержания заданной дистанции до впереди идущего автомобиля периодически осуществляют снижение давления в контурах гидроблока управления тормозными механизмами за счет кратковременного обесточивания соответствующих отсечных электромагнитных клапанов в тормозных контурах.
На решение поставленной технической задачи направлено также то, что при вмешательстве водителя в процесс управления для осуществления экстренного торможения с помощью тормозной педали процесс включения сцепления осуществляют в течение заданного времени, обеспечивая плавность увеличения нагрузки на коленчатый вал и предотвращение остановки двигателя.
Решение поставленной технической задачи становится возможным при его реализации для системы, в состав которой входят расчетно-логический блок, два гидроблока, включающих в себя насосы с электроприводом и электромагнитные клапаны. В отличие от прототипа реализуемое замедление автомобиля при автоматическом торможении определяется временем работы электромотора. Предусмотренное способом раздельное управление электромагнитными клапанами гидроблоков позволяет иметь различные давления в независимых друг от друга контурах тормозной системы и контуре гидравлического привода сцепления, обеспечивая в автоматическом режиме необходимую скорость торможения.
Изобретение поясняется следующими иллюстрациями, где на фиг.1 приведена структурная схема системы управления гидравлическим тормозным приводом для обеспечения автоматического торможения автомобиля; на фиг.2 показана структурная схема гидроблока, используемого для создания давления в контуре управления сцеплением; на фиг.3 показана структурная схема гидроблока, используемого для создания давления в контурах тормозной системы; на фиг.4 приведен алгоритм работы программы, по которой расчетно-логический блок управляет гидроблоками для обеспечения автоматического торможения.
Способ управления гидравлическим тормозным приводом для обеспечения автоматического торможения автомобиля, оборудованного гидравлической тормозной системой, механической коробкой передач и электрическим приводом дроссельной заслонки, заключается в том, что предварительно устанавливают критерии начала и окончания процесса автоматического торможения. В процессе автоматического торможения автомобиля периодически контролируют и регистрируют ряд измеряемых и расчетных параметров движения, например, скорость движения, общий пройденный путь, расчетный тормозной путь, время торможения и реальный тормозной путь, выдаваемые команды. При наступлении режима автоматического торможения используют тормозную жидкость, находящуюся в главном тормозном цилиндре, и контуры гидроблоков управления тормозными механизмами передних и задних колес. При этом сохраняют работоспособной антиблокировочную систему автомобиля. В процессе автоматического торможения дополнительно осуществляют управление сцеплением автомобиля с помощью независимого гидроблока с одним контуром. Согласно способу устанавливают время работы электромоторов и запитывания аккумуляторных электромагнитных клапанов для гидроблоков управления тормозными механизмами и сцеплением исходя из расчета получения различных давлений в каждом контуре гидроблока управления тормозными механизмами и в контуре гидроблока управления сцеплением. При этом управляют отсечными и аккумуляторными электромагнитными клапанами в соответствующих контурах, что позволяет получать различные заданные значения замедления автомобиля при автоматическом торможении.
В процессе автоматического торможения для поддержания заданной дистанции до впереди идущего автомобиля периодически осуществляют снижение давления в контурах гидроблока управления тормозными механизмами за счет кратковременного обесточивания соответствующих отсечных электромагнитных клапанов в тормозных контурах.
При вмешательстве водителя в процесс управления для осуществления экстренного торможения с помощью тормозной педали процесс включения сцепления осуществляют в автоматическом режиме в течение заданного времени для обеспечения плавности увеличения нагрузки на коленчатый вал, предотвращая тем самым остановку двигателя.
Способ управления автоматическим торможением реализуется в устройстве, схематически представленном на фиг.1, где изображен контур сцепления, включающий в себя главный цилиндр 1 сцепления, рабочий цилиндр 2 сцепления и дополнительно включенный в магистраль сцепления гидроблок 3 управления сцеплением. Тормозная система автомобиля, способного выполнять автоматическое торможение, состоит из главного тормозного цилиндра 4 с вакуумным усилителем 5, который подключен через гидроблок 6 управления тормозными механизмами и штатный гидроблок 7 АБС автомобиля к тормозным механизмам 8 и 9 передних и задних колес соответственно. В состав устройства входят также расчетно-логический блок 10 и пульт 11 управления.
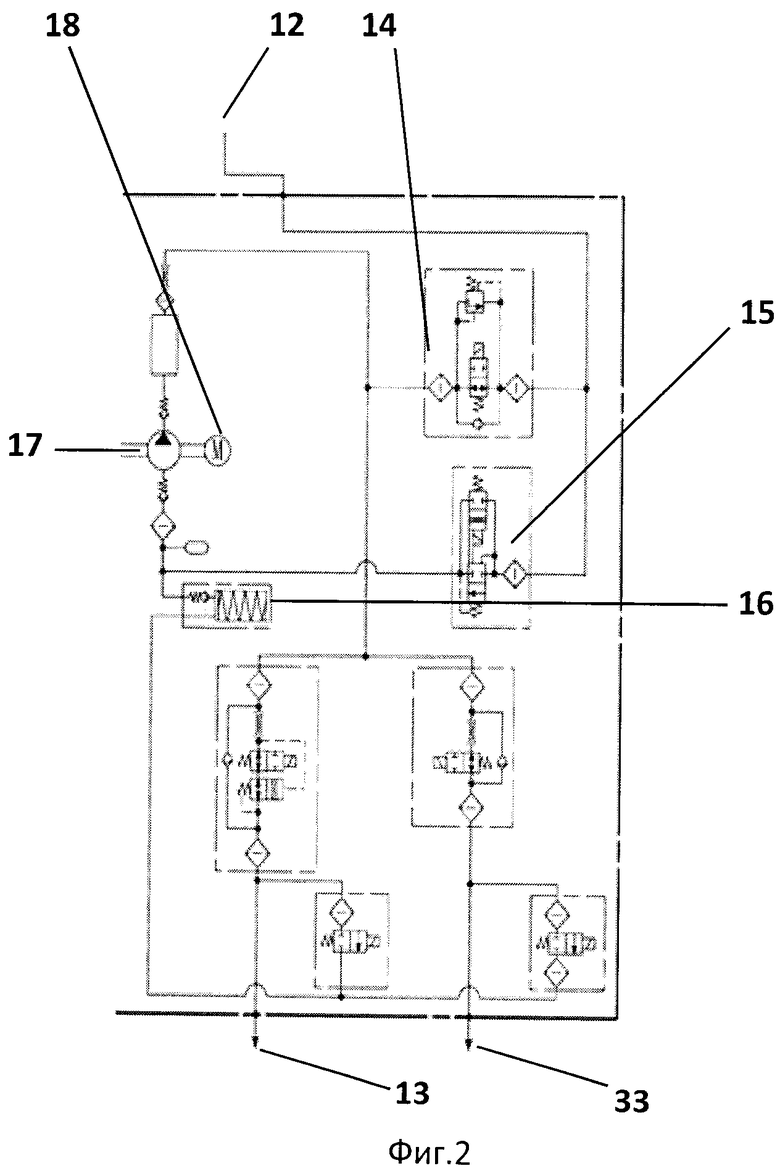
Гидроблок 3 управления сцеплением имеет вход 12 и выход 13 (см. фиг.2). В состав гидроблока 3 входят также отсечной клапан 14, клапан 15 аккумулятора, гидроаккумулятор 16 и насос 17 с приводом от электрического двигателя 18. При этом ко входу 12 гидроблока 3 подключен главный цилиндр 1 сцепления, а его выход 13 соединен с рабочим цилиндром 2 сцепления (см. фиг.1).
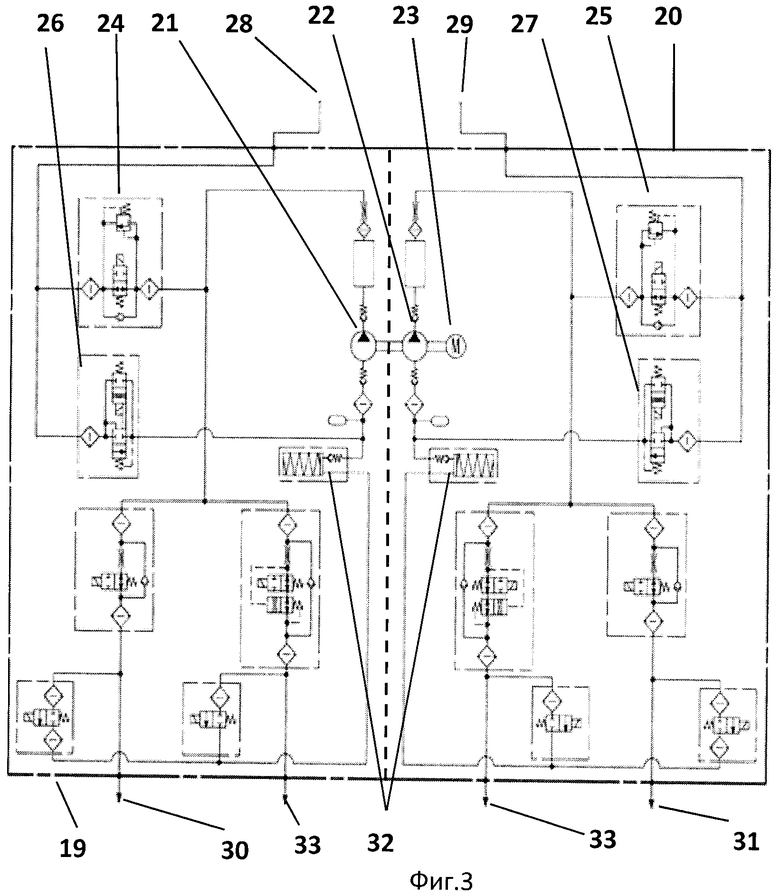
Гидроблок 6 управления тормозными механизмами состоит из контура 19 задних тормозных механизмов 9 (см. фиг.3) и контура 20 передних тормозных механизмов 8, независимых друг от друга. Контуры 19 и 20 тормозных механизмов 8 и 9 содержат насосы 21 и 22 соответственно с общим электрическим двигателем 23, а также соответствующие насосам 21 и 22 отсечные клапаны 24 и 25, а также аккумуляторные клапаны 26 и 27. При этом вход 28 соединен с контуром 19 задних тормозных механизмов 9, а вход 29 - с контуром 20 передних тормозных механизмов 8 главного тормозного цилиндра 1, выход 30 соединен с контуром 19 задних тормозных механизмов 9 гидроблока 7 АБС, а выход 31 - с контуром 20 передних тормозных механизмов 8 гидроблока 7 АБС. В каждом из контуров 19 и 20 имеются гидроаккумуляторы 32, а также выходы 33, которые в гидроблоке 6 управления тормозными механизмами и гидроблоке 3 управления сцеплением используются для подключения манометров на этапе отладки системы.
Способ управления тормозным приводом осуществляется следующим образом.
Входящий в состав устройства расчетно-логический блок 10 служит для формирования сигналов, вызывающих срабатывания гидроблоков 3 и 6 управления сцеплением и управления тормозными механизмами 8 и 9 соответственно. С помощью пульта 11 управления подаются основные команды начала и окончания автоматического торможения, а также вспомогательные команды, необходимые для регистрации в памяти расчетно-логического блока 10 параметров движения автомобиля. Пульт 11 управления используется на этапе отладки системы автоматического торможения. После завершения исследовательских работ он может быть заменен на дальномер, определяющий действительную дистанцию до лидирующего автомобиля (препятствия). В результате сравнения в расчетно-логическом блоке 10 действительной дистанции с безопасной, рассчитанной на основании собственной скорости и скорости лидирующего автомобиля, будет приниматься решение о необходимости и интенсивности автоматического торможения.
При неавтоматическом управлении в обесточенном состоянии отсечной клапан 14 (см. фиг.2) связывает вход 12 с выходом 13 через внутренние магистрали гидроблока 3 управления сцеплением.
При неавтоматическом управлении в обесточенном состоянии клапан 15 аккумулятора перекрывает внутренние магистрали гидроблока 3 управления сцеплением, соединяющие вход 12 с гидроаккумулятором 16 и входом насоса 17, приводимого в действие электрическим двигателем 18. Остальные элементы гидроблока 3 для автоматического управления не используются. Неиспользуемые магистрали гидроблока 3 закрываются пробками для недопущения попадания грязи внутрь гидроблока, что может привести к его преждевременному выходу из строя.
При выдаче расчетно-логическим блоком 10 на гидроблок 3 управления сцеплением и гидроблок 6 управления тормозными механизмами сигнала автоматического торможения в гидроблоке 3 управления сцеплением (см. фиг.2) запитывается обмотка отсечного клапана 14, в результате он перекрывает магистраль, связывающую вход 12 и, следовательно, главный цилиндр 1 сцепления с выходом 13 и, следовательно, с рабочим цилиндром 2 сцепления. Отсечной клапан 14 будет находиться под напряжением до момента прихода сигнала растормаживания или по достижении времени максимального нахождения обмотки клапана 14 под напряжением. Время максимального нахождения обмотки отсечного клапана 14 под напряжением устанавливается для предохранения обмотки клапана от перегрева. Одновременно с запитыванием отсечного клапана 14 на определенное время, заданное с пульта 11 управления расчетно-логическому блоку 10, запитывается обмотка клапана 15 аккумулятора управления сцеплением и включается электрический двигатель 18, приводящий в действие насос 17. Клапан 15 аккумулятора соединяет вход 12 с входом гидроаккумулятора 16 и насоса 17. Так как отсечной клапан 14 управления сцеплением закрыт, тормозная жидкость, забираемая из главного цилиндра 1 сцепления, может подаваться насосом только к рабочему цилиндру 2 сцепления через выход 13 гидроблока 3 управления сцеплением. В результате сцепление выключается.
Для перевода гидроблока 6 управления тормозными механизмами в автоматический режим запитываются обмотки электромагнитных клапанов 24, 25, 26, 27 (см. фиг.3) и включается электрический двигатель 23.
Когда обмотки используемых для автоматического управления клапанов 24, 25, 26, 27 обесточены, входы 28 и 29 соединены соответственно с выходами 30 и 31, что позволяет водителю управлять автомобилем в неавтоматическом режиме.
По приходу сигнала автоматического торможения от расчетно-логического блока 10 на гидроблок 6 управления тормозными механизмами в нем запитываются обмотки отсечных клапанов 24 и 25, перекрывающие магистрали, связывающие входы 28 и 29 с выходами 30 и 31. В результате главный тормозной цилиндр 4 отсоединяется от передних и задних тормозных механизмов 8 и 9 соответственно. Одновременно с запитыванием отсечных клапанов 24 и 25 на определенное время, заданное с пульта 11 управления расчетно-логическому блоку 10, запитываются обмотки клапанов 26 и 27 аккумуляторов тормозных контуров 19 и 20 и включается электрический двигатель 23 насосов 21 и 22. Клапаны 26 и 27 аккумуляторов соединяют выходы главного тормозного цилиндра 4 с входами насосов 21 и 22. Так как отсечные клапаны 24 и 25 контуров 19 и 20 закрыты, тормозная жидкость, забираемая из главного тормозного цилиндра 4, может подаваться насосами 21 и 22 только к тормозным механизмам 8 и 9 через блок 7 АБС. В результате автомобиль затормаживается. Раздельно устанавливаемая длительность нагнетания давлений насосами 21 и 22 за счет различного времени открытия клапанов 26 и 27 аккумуляторов позволяет иметь различные давления в соответствующих контурах 19 и 20 (что может потребоваться из-за различных тормозных механизмов, установленных на автомобиле, например передние тормозные механизмы - дисковые, задние - барабанные, а также в случае наличия механического регулятора тормозных сил задней оси) и определяет реализуемое замедление. Кратковременное обесточивание обмоток отсечных клапанов 24 и 25 позволяет уменьшать давление в соответствующих контурах 19 и 20 и, следовательно, замедление, реализуемое автомобилем, что может понадобиться при автоматическом поддержании дистанции до впереди идущего автомобиля в режиме автоматического торможения. Нажатие водителем на тормозную педаль вызывает однократное и полное обесточивание обмоток отсечных клапанов 24 и 25 гидроблока 6 управления тормозными механизмами и обесточивание по специальному алгоритму обмотки отсечного клапана 14 гидроблока 3 управления сцеплением, что необходимо для плавного включения сцепления, исключающего остановку двигателя, и дает возможность водителю управлять автомобилем в неавтоматическом режиме.
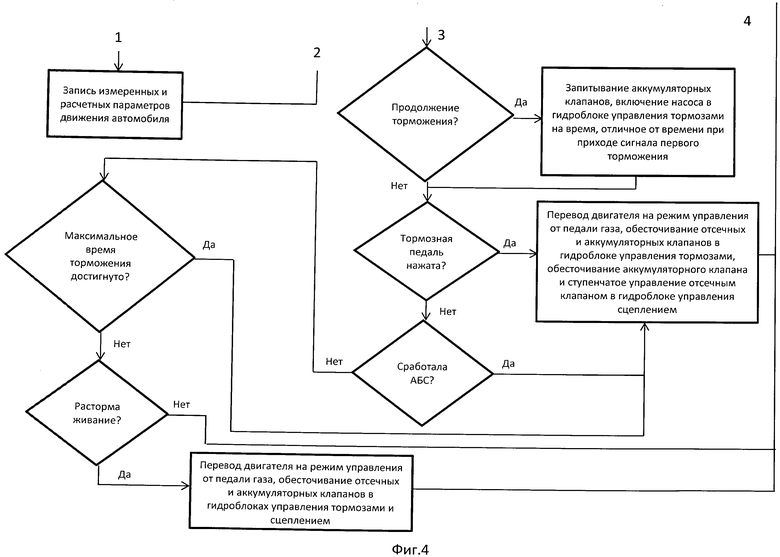
Блок-схема программы управления гидроблоками приведена на фиг.4.
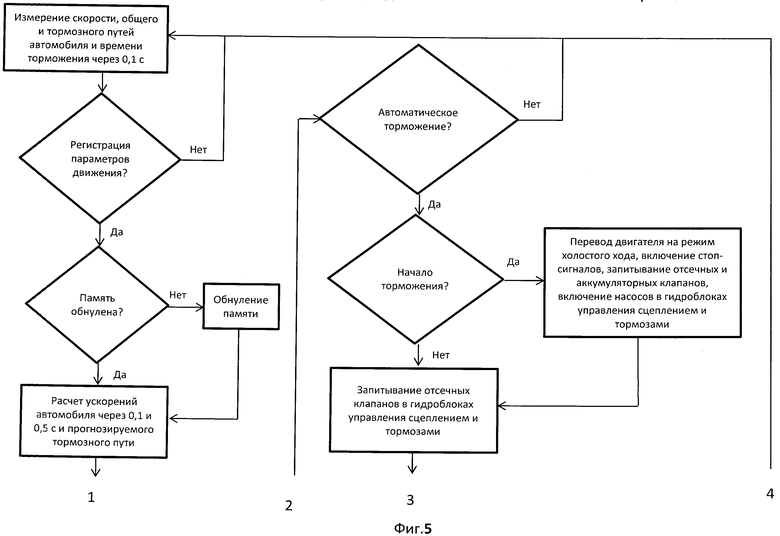
Поскольку описываемая система используется в настоящее время для исследования процессов автоматического торможения, программа, заложенная в расчетно-логический блок 10, кроме управления элементами системы автоматического торможения обеспечивает регистрацию измеренных и расчетных параметров движения автомобиля по командам, задаваемым с пульта 11 управления (см. фиг.4). При движении автомобиля измеряются скорость и путь, на основании этих параметров рассчитываются ускорения за 0,1 с и 0,5 с. При выдаче с пульта 11 управления команды автоматического торможения рассчитывается тормозной путь в зависимости от реализуемого замедления, определяемого длительностями работы электромотора и клапанов аккумуляторов гидроблока 6 управления тормозными механизмами, задаваемыми расчетно-логическому блоку 10, а также измеряется реальный тормозной путь и время торможения в автоматическом режиме. Параметры измеряются через 0,1 с.
Если с пульта 11 управления выдается команда регистрации параметров движения автомобиля, обнуляется область памяти, в которой будут сохраняться данные для дальнейшей обработки, и начинается запись указанных выше параметров.
Если с пульта 11 управления выдается команда автоматического торможения, то расчетно-логический блок 10 переводит двигатель автомобиля на режим холостого хода, включает стоп-сигналы, запитывает отсечные и аккумуляторные клапаны 14, 15, 24, 25, 26, 27, включает электродвигатели 18, 23 насосов 17, 21, 22 в гидроблоках 3 и 6 управления сцеплением и тормозными механизмами соответственно. После окончания работы электродвигателей 18, 23 насосов 17, 21, 22 и истечения времени активизации клапанов 15, 26, 27 аккумуляторов, если режим автоматического торможения продолжается, отсечные клапаны 14, 24, 25 в соответствующих гидроблоках 3 и 6 управления сцеплением и тормозными механизмами остаются запитанными до истечения времени активизации клапанов или до прихода с пульта 11 управления команды растормаживания.
Если водитель нажимает на тормозную педаль или сработал штатный блок 7 АБС автомобиля, то расчетно-логический блок 10 переводит двигатель автомобиля на режим управления от педали газа, обесточивает отсечные и аккумуляторные клапаны 14, 15, 24, 25, 26, 27 в гидроблоке 6 управления тормозными механизмами, обесточивает клапан 15 аккумулятора в гидроблоке 3 управления сцеплением и управляет отсечным клапаном 14 в этом же гидроблоке по специальному алгоритму для плавного включения сцепления. Алгоритм выглядит следующим образом: сначала отсечной клапан 14 обесточивается на короткое время, заданное в расчетно- логическом блоке 10, в результате давление в гидроприводе сцепления уменьшается и сцепление частично включается, плавно увеличивая нагрузку на двигатель автомобиля, затем определенное время сцепление удерживается в этом положении, позволяя двигателю приспособиться к увеличению нагрузки, после чего отсечной клапан 14 обесточивается полностью и сцепление полностью включается. Такой алгоритм не приводит к остановке двигателя при переходе от автоматического к неавтоматическому режиму управления автомобилем.
Если с пульта 11 управления пришла команда растормаживания или достигнуто максимальное время торможения (максимальное время запитывания обмоток отсечных клапанов), двигатель автомобиля переводится на режим управления от педали газа, полностью обесточиваются отсечные и аккумуляторные клапаны 14, 15, 24, 25, 26, 27 в гидроблоках 6 и 3 управления тормозными механизмами и сцеплением соответственно.
Таким образом, изобретение позволяет осуществлять торможения автомобиля с различной интенсивностью в автоматическом режиме за счет создания различных давлений в контурах тормозной системы и контуре гидравлического привода сцепления автомобилей любых производителей, имеющих механическую коробку передач, электрический привод дроссельной заслонки и гидравлические приводы тормозов и сцепления, по сигналу расчетно-логического блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОДЕЙСТВУЮЩАЯ АНТИБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2261811C2 |
| ТОРМОЗНАЯ СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ | 2008 |
|
RU2505431C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТОРМОЗНОЙ СИСТЕМЫ, А ТАКЖЕ ТОРМОЗНАЯ СИСТЕМА ДЛЯ АВТОМОБИЛЯ | 2014 |
|
RU2664808C1 |
| СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ ЭКСТРЕННОГО ТОРМОЖЕНИЯ И РАСПОЗНАВАНИЯ СЛЕДУЮЩЕГО ОДНОГО ЗА ДРУГИМ ТОРМОЖЕНИЯ | 2006 |
|
RU2416537C2 |
| АНТИБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА С АВТОМАТИЧЕСКИМ УПРАВЛЕНИЕМ ПРИ АВАРИЙНОМ ТОРМОЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2277480C2 |
| Устройство для автоматического торможения автомобиля | 1988 |
|
SU1643245A1 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА И ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА | 1990 |
|
RU2041090C1 |
| АНТИБЛОКИРОВОЧНАЯ СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ АВТОМОБИЛЯ | 2004 |
|
RU2276023C1 |
| ТОРМОЗНАЯ СИСТЕМА | 2010 |
|
RU2486083C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
Изобретение относится к тормозным системам транспортных средств и может быть использовано в автоматических устройствах управления транспортными средствами. Способ заключается в контроле и регистрации при движении ряда измеряемых и расчетных параметров движения, по которым предварительно устанавливают критерии начала и окончания процесса автоматического торможения. При наступлении данного режима используют тормозную жидкость, находящуюся в главном тормозном цилиндре, и контуры управления тормозными механизмами передних и задних колес, при сохранении работоспособности антиблокировочной системы. В процессе торможения дополнительно осуществляют управление сцеплением автомобиля с помощью независимого гидроблока с одним контуром. Заданное замедление реализуют путем установки времени работы электромоторов и запитывания аккумуляторных электромагнитных клапанов, причем раздельно для гидроблоков управления тормозными механизмами и сцеплением. Исходным моментом является расчет необходимых давлений в каждом контуре используемых гидроблоков, а управляют в процессе торможения отсечными и аккумуляторными электромагнитными клапанами в соответствующих гидравлических контурах. Достигается возможность осуществления торможения с различной интенсивностью в автоматическом режиме за счет создания различных давлений в контурах тормозной системы и контуре гидравлического привода сцепления автомобилей. 2 з.п. ф-лы, 4 ил.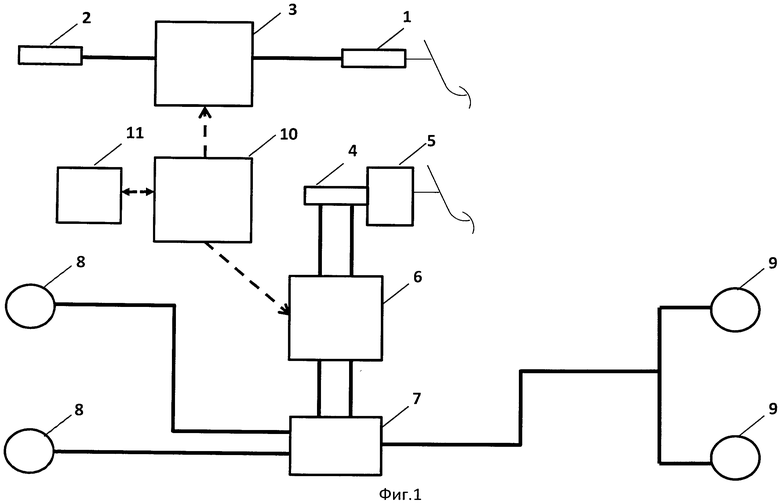
1. Способ управления гидравлическим тормозным приводом для обеспечения автоматического торможения автомобиля, оборудованного гидравлической тормозной системой, гидравлическим приводом сцепления, механической коробкой передач и электрическим приводом дроссельной заслонки, заключающийся в том, что при движении контролируют и регистрируют ряд измеряемых и расчетных параметров движения, по которым предварительно устанавливают критерии начала и окончания процесса автоматического торможения, при этом при наступлении режима автоматического торможения используют тормозную жидкость, находящуюся в главном тормозном цилиндре, и контуры гидроблоков управления тормозными механизмами передних и задних колес, при сохранении работоспособности антиблокировочной системы, отличающийся тем, что в процессе автоматического торможения дополнительно осуществляют управление сцеплением автомобиля с помощью независимого гидроблока с одним контуром, при этом реализуют замедление заданного значения, для чего устанавливают время работы электромоторов и запитывания аккумуляторных электромагнитных клапанов раздельно для гидроблоков управления тормозными механизмами и сцеплением, исходя из расчета необходимых давлений в каждом контуре гидроблоков, управляя при этом отсечными и аккумуляторными электромагнитными клапанами в соответствующих контурах.
2. Способ по п.1, отличающийся тем, что в процессе автоматического торможения для поддержания заданной дистанции до впереди идущего автомобиля периодически осуществляют снижение давления в контурах гидроблока управления тормозными механизмами за счет кратковременного обесточивания соответствующих отсечных электромагнитных клапанов в тормозных контурах.
3. Способ по п.1, отличающийся тем, что при вмешательстве водителя в процесс управления для осуществления экстренного торможения с помощью тормозной педали процесс включения сцепления осуществляют в течение заданного времени, обеспечивая плавность увеличения нагрузки на коленчатый вал и предотвращение остановки двигателя.
| СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ ЭКСТРЕННОГО ТОРМОЖЕНИЯ И РАСПОЗНАВАНИЯ СЛЕДУЮЩЕГО ОДНОГО ЗА ДРУГИМ ТОРМОЖЕНИЯ | 2006 |
|
RU2416537C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ ДВИЖЕНИИ В КОЛОННЕ | 2007 |
|
RU2388057C2 |
| DE 4418043 C1, 06.07.1995; | |||
| US 2007194622 A1, 23.08.2007; | |||
| DE 102007054023 A1, 21.05.2008; | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ/ТЯГОВЫМ УСИЛИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2372227C2 |
| US 2007132312 A1, 14.06.2007; | |||
| Гидравлическая тормозная система транспортного средства | 1970 |
|
SU547172A3 |

