Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления установленным на автотранспортном средстве автоматическим дисковым сцеплением согласно преамбуле пункта 1 формулы изобретения, предназначенным для передачи тягового усилия двигателя внутреннего сгорания трансмиссии.
Изобретение также относится к машиночитаемому носителю информации, содержащему машиночитаемый программный код для осуществления упомянутого способа.
Уровень техники
Автомобили для тяжелых условий эксплуатации все чаще оснащают автоматическими коробками передач типа автоматических механических трансмиссий (АМТ), что стало возможным с развитием микрокомпьютерной технологии, позволившей при помощи управляющего компьютера и нескольких элементов управления, например серводвигателей, точно регулировать число оборотов двигателя, включение и выключение автоматического дискового сцепления двигателя и коробки передач и элементов сцепления коробки передач относительно друг друга и тем самым всегда обеспечивать плавное переключение на передачу с правильной частотой вращения.
АМТ обычно имеет входной вал, промежуточный вал по меньшей мере с одним зубчатым колесом, входящим в зацепление с зубчатым колесом на входном валу, и вторичный вал с зубчатыми колесами, которые входят в зацепление с зубчатыми колесами на промежуточном валу. Вторичный вал дополнительно соединен с выходным валом, который посредством, например, карданного вала связан с ведущими колесами. Каждая пара зубчатых колес имеет передаточное отношение, отличающееся от другой пары зубчатых колес коробки передач. Различные пары зубчатых колес передают крутящий момент двигателя ведущим колесам, за счет чего получают различные передаточные отношения.
Развитие компьютерной технологии также оказало воздействие на электронные системы управления и обратной связи автомобильного двигателя, сделав их более точными, повысив их быстродействие и улучшив их совместимость с существующими двигателями и условиями эксплуатации. Весь процесс сгорания топлива может точно регулироваться в соответствии с любой рабочей обстановкой. Регулятор газа (акселератор) автомобиля (например, педаль акселератора или "газа"), который главным образом регулирует подачу топлива в двигатель, управляет двигателем автомобиля посредством системы электропроводов и электронных сигналов. Для этого акселератор оснащен датчиками, которые определяют его положение, иными словами, какое необходимо открытие дроссельной заслонки.
Когда автомобиль с автоматическим сцеплением и трансмиссией движется вниз по склону при не нажатой водителем педали акселератора и включенной, например, низкой передаче (с высоким передаточным отношением), частота вращения двигателя будет ограничена величиной, близкой к холостым оборотам двигателя, если двигатель развивает определенное тормозное усилие, достаточное по меньшей мере для незначительного замедления движения автомобиля, чтобы впоследствии частота вращения двигателя приблизилась к холостым оборотам двигателя, что обычно приводит к выключению сцепления. Если сцепление в этой ситуации выключено без приведения в действие рабочего тормоза или лишь при слегка приведенном в действие рабочем тормозе, транспортное средство внезапно ускорится из-за ослабления тормозного усилия, развиваемого двигателем. В этой ситуации лишь при слегка приведенном в действие рабочем тормозе большая часть тормозного усилия развивается двигателем, что приводит к резкому ускорению при выключении сцепления двигателя с трансмиссией и ведущими колесами транспортного средства. В этом случае водитель, вероятно, ощутит дискомфорт, в особенности, если выключение сцепления инициировано легким нажатием на педаль тормоза.
В основу настоящего изобретения положена задача исключения возможного возникновения ситуации, в которой происходит резкое ускорение транспортного средства из-за выключения сцепления или даже выключения сцепления, инициированного легким нажатием на педаль тормоза.
Краткое изложение сущности изобретения
В настоящем изобретении предложен способ управления выключением автоматического сцепления транспортного средства, в котором основной функцией сцепления является передача тягового усилия установленного на транспортном средстве двигателя внутреннего сгорания на входной вал установленной на транспортном средстве трансмиссии, а частоту вращения двигателя регулируют посредством акселератора. Способ отличается тем, что при обнаружении движения транспортного средства по нисходящему уклону и нулевого смещения акселератора инициируется снижение предела частоты вращения двигателя на первой передаче, при котором выключается сцепление.
Преимущество предложенного в изобретении способа состоит в том, что сцепление выключено позже, чем обычно, за счет чего приводится в действие регулятор частоты вращения двигателя на холостом ходу, и двигатель создает положительный крутящий момент на выходе, ослабляющий влияние потери крутящего момента из-за торможения двигателем, при котором сцепление выключено. За счет этого уменьшается дискомфорт, ощущаемый водителем.
В одном из вариантов осуществления предложенного в изобретении способа описано упомянутое приведение в действие регулятора частоты вращения двигателя на холостом ходу. В этом варианте осуществления упомянутый предел частоты вращения двигателя на первой передаче снижают до уровня ниже той частоты, при которой установленный на транспортном средстве регулятор частоты вращения двигателя на холостом ходу приводится в действие и начинает впрыскивать топливо в двигатель внутреннего сгорания. За счет этого ослабляется неудобство при потере крутящего момента из-за торможения двигателем, когда сцепление выключено.
В другом варианте осуществления способа упомянутый предел частоты вращения двигателя на первой передаче снижают до частоты, при которой установленный на транспортном средстве регулятор частоты вращения двигателя на холостом ходу впрыскивает количество топлива, соответствующее положительному крутящему моменту двигателя, который равен текущему тормозящему отрицательному моменту двигателя, за счет чего общий крутящий момент на выходе двигателя примерно равен нолю. При этом полностью устраняется эффект ускорения транспортного средства вследствие потери крутящего момента из-за торможения двигателем, когда сцепление выключено.
В одном из дополнительных вариантов осуществления предложенного в изобретении способа упомянутое снижение предела частоты вращения двигателя на первой передаче также инициируют при дополнительном обнаружении легкого нажатия или отсутствия нажатия на педаль рабочего тормоза транспортного средства. За счет этого гарантируется отсутствие ускорения транспортного средства, когда водитель слегка надавит на педаль тормоза. В дополнительно усовершенствованном варианте осуществления упомянутое легкое нажатие соответствует смещению упомянутой педали рабочего тормоза на величину до 25% от общего возможного смещения.
Краткое описание чертежей
Далее настоящее изобретение более подробно описано со ссылкой на приложенные чертежи, на которых в качестве примеров показаны предпочтительные варианты осуществления изобретения: на фиг.1 схематически показан предпочтительный вариант осуществления конфигурации транспортного средства согласно изобретению,
на фиг.2 схематически показано компьютерное устройство, используемое в одном из вариантов осуществления изобретения.
Описание изобретения
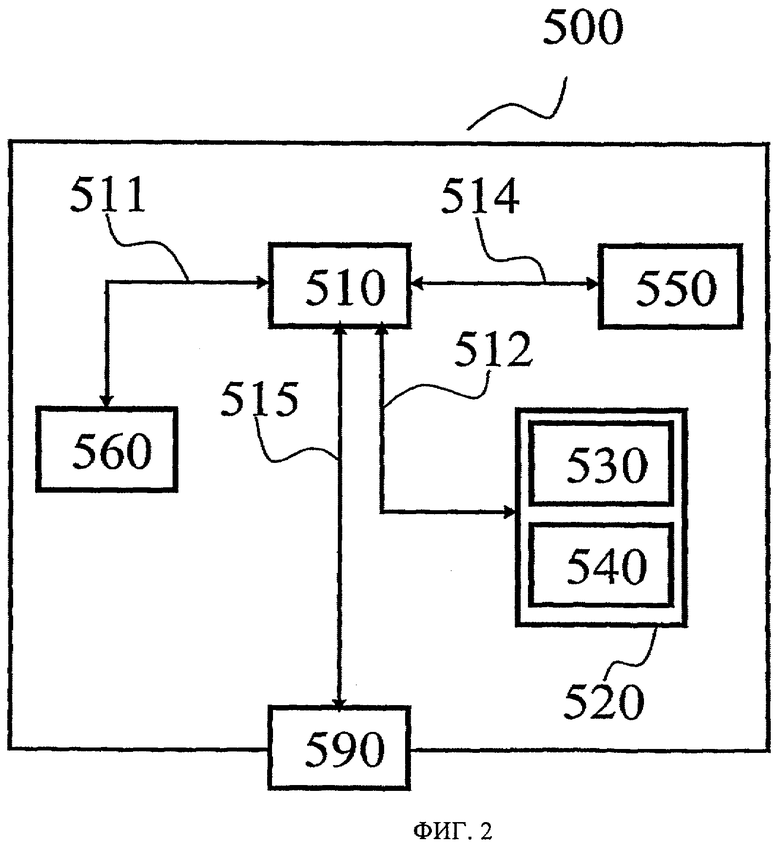
В одном из вариантов осуществления транспортное средство 1 имеет двигатель 2 внутреннего сгорания, например дизельный двигатель с коленчатым валом 21, который связан с сухим однодисковым сцеплением 3, которое помещается в корпусе 22 муфты сцепления. Коленчатый вал 21 неподвижно соединен с входным валом (не показан), который с возможностью вращения установлен в картере 23 коробки передач 4. В картере 23 коробки передач с возможностью вращения также установлены не показанные вторичный вал и промежуточный вал.
Для управления различными поршневыми цилиндрами с пневматическим приводом предусмотрен блок 16 управления трансмиссией, включающий различные передаточные отношения между входным валом и выходным валом 5 трансмиссии согласно программируемым логическим схемам. Блок 16 управления трансмиссией также служит для управления сцеплением 3 с целью включение/выключение сцепления двигателя 2 и трансмиссии 4, например, когда происходит переключение передач или транспортное средство движется со скоростью ниже частоты вращения двигателя на холостом ходу. Выходной вал переходит в карданный вал и соединяет трансмиссию с ведомыми задними колесами 6.
Процесс принятия решений о том, когда необходимо переключить передачу, известен из уровня техники и не будет подробно описан в настоящем изобретении. Как известно из уровня техники, при решении о выключении сцепления 3 могут учитываться такие параметры, как частота вращения двигателя, положение педали акселератора, частота вращения входного вала и замедление частоты вращения двигателя.
Двигатель 2 оснащен известным из уровня техники регулятором 20 частоты вращения двигателя на холостом ходу, и соответственно существует частота вращения двигателя на холостом ходу, ниже которой регулятор 20 частоты вращения двигателя на холостом ходу не позволяет падать частоте вращения двигателя. Регулятор 20 частоты вращения двигателя на холостом ходу предпочтительно расположен в блоке 12 управления двигателем. Регулятором частоты вращения двигателя на холостом ходу может осуществляться посредством программного кода блока 12 управления двигателем, рассчитанного на выполнение функции регулирования частоты вращения двигателя на холостом ходу. Если блок 16 управления трансмиссией обнаруживает замедление частоты вращения двигателя, в результате которого частота вращения двигателя снижается до уровня, близкого к частоте вращения двигателя на холостом ходу, блок 16 управления трансмиссией может инициировать выключение сцепления для защиты двигателя 2 от остановки.
С помощью акселератора 13 (предпочтительно педали акселератора) известным способом регулируют крутящий момент, создаваемый двигателем 2. С помощью углового датчика определяют положение акселератора, которое регистрирует блок 14 управления акселератора.
Транспортное средство 1 также имеет рабочую тормозную систему, включающую приводы 8 рабочих тормозов, расположенные на не являющихся ведомыми передних колесах 7 и ведомых колесах 6, средство 9 управления рабочим тормозом 9 (предпочтительно тормозную педаль) и блок 10 управления тормозами. Функция рабочей тормозной системы известна из уровня техники.
Различные блоки управления, которыми оснащено транспортное средство, предпочтительно связаны известным способом посредством системы 15 шин передачи данных, установленной на транспортном средстве. Так, блок 16 управления трансмиссией может быть рассчитан на косвенное управление впрыском топлива (т.е. частотой вращения двигателя и крутящим моментом) в зависимости от положения акселератора и прямое управление подачей топлива в пневматические поршневые цилиндры привода 17 сцепления, посредством чего регулируют, например, упомянутое сцепление 3.
Когда рычаг 24 передачи переведен в режим автоматического выбора передачи, выбор передачи и решения о переключении принимаются автоматически блоком 16 управления трансмиссией на основании определенных измеренных и(или) вычисленных параметров, таких как скорость транспортного средства, частота вращения двигателя, быстрота изменения скорости транспортного средства, быстрота изменения частоты вращения двигателя, положение акселератора, быстрота изменения положения акселератора, срабатывание тормозной системы транспортного средства, текущее включенное передаточное отношение, уклон дороги и т.п., которые известны из уровня техники. Уклон дороги может быть определен известным способом, например с помощью пьезоэлектрического датчика уклона. Этот датчик предпочтительно расположен в блоке 16 управления трансмиссией.
В одном из вариантов осуществления изобретения блок 16 управления трансмиссией запрограммирован распознавать определенное состояние транспортного средства, которое описано выше, путем обнаружения: движения транспортного средства по нисходящему уклону и нулевого смещения акселератора.
При обнаружении упомянутого определенного состояния блок 16 управления трансмиссией запрограммирован снижать предел частоты вращения двигателя на первой передаче, при котором согласно известному уровню техники сцепление 3 было бы выключено. Таким образом, согласно изобретению выключение сцепления 3 во время упомянутого состояния будет отложено до достижения двигателем меньшей частоты вращения. Когда частота вращения двигателя снижается до уровня, близкого к частоте вращения двигателя на холостом ходу, регулятор 20 частоты вращения двигателя на холостом ходу приводится в действие и начинает впрыск определенного количества топлива в двигатель 2, чтобы попытаться прекратить дальнейшее замедление частоты вращения двигателя. В результате впрыска топлива двигатель 2 создает определенный положительный крутящий момент, который уравновешивает отрицательный крутящий момент на выходе двигателя 2 вследствие различных потерь в двигателе, например, из-за трения между различными деталями двигателя и различных вспомогательных нагрузок, таких как генератор и воздушный компрессор.
В одном из предпочтительных вариантов осуществления изобретения блок 16 управления трансмиссией запрограммирован обнаруживать и рассчитывать момент, когда положительный крутящий момент на выходе (регулируемый регулятором 20 частоты вращения двигателя на холостом ходу) двигателя 2 становится равным отрицательному крутящему моменту на выходе двигателя. Когда положительный и отрицательный крутящие моменты двигателя становятся примерно равны, блок 16 управления трансмиссией запрограммирован инициировать выключение сцепления 3. Поскольку чистый крутящий момент на выходе двигателя 2 равен нолю, при выключении сцепления двигателя 2 с трансмиссией 4 и ведущими колесами 6 транспортного средства не происходит изменения ускорения/замедления транспортного средства 1.
Положительный крутящий момент на выходе двигателя может быть рассчитан исходя из известного количества топлива, впрыснутого в двигатель известным способом. Отрицательный крутящий момент на выходе двигателя может быть оценен различными способами, известными из уровня техники. В качестве альтернативы, можно использовать какой-либо датчик крутящего момента на выходном валу двигателя. Если датчик крутящего момента определяет, что крутящий момент равен нолю, положительный и отрицательный крутящие моменты двигателя равны.
В одном из предпочтительных вариантов осуществления изобретения упомянутый предел частоты вращения двигателя на первой передаче снижают до уровня ниже частоты вращения двигателя на холостом ходу. Например, в случае грузового автомобиля большой грузоподъемности это означает, что предел частоты вращения двигателя на первой передаче снижают, например, с 650 об/мин до 600 об/мин. Пределом частоты вращения двигателя согласно данному варианту осуществления может являться определенное значение, предварительно сохраненное в блоке 16 управления трансмиссией.
В другом предпочтительном варианте осуществления изобретения степень снижения упомянутого предела частоты вращения двигателя на первой передаче определяют в виде функции по меньшей мере угла упомянутого нисходящего уклона.
В дополнительном предпочтительном варианте осуществления изобретения степень снижения упомянутого предела частоты вращения двигателя на первой передаче дополнительно определяют в виде функции замедления частоты вращения двигателя.
В другом предпочтительном варианте осуществления изобретения упомянутая функция снижения предела частоты вращения двигателя на первой передаче дополнена ограничением на крутящий момент двигателя, согласно которому привод на ведущие колеса выключается, когда расчетный чистый крутящий момент на выходе превышает определенный предел.
В одном из вариантов осуществления изобретения упомянутую функцию снижения предела частоты вращения двигателя на первой передаче приводят в действие, если только педаль 9 рабочего тормоза транспортного средства сильно не нажата. Упомянутое сильное нажатие может соответствовать смещению упомянутой педали рабочего тормоза на величину более 25% от общего возможного смещения.
Функция снижения предела частоты вращения двигателя на первой передаче согласно изобретению может использоваться при включенных высоких или низких передаточных отношениях,
На фиг.2 показано устройство 500 согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 520, процессор 510 и память 560 с оперативной записью и считыванием. Память 520 имеет первую область 530, в которой хранится компьютерная программа для управления устройством 500. Компьютерной программой для управления устройством 500, хранящейся в области 530 памяти, может являться операционная система.
Устройство 500 может помещаться, например, в блоке управления, таком как блок 16 управления трансмиссией. Блоком 510 обработки данных может являться, например, микрокомпьютер.
Память 520 также имеет вторую область 540, в которой хранится программа управления выключением сцепления согласно изобретению. В одном из альтернативных вариантов осуществления программа управления функцией выключения сцепления хранится в отдельной энергонезависимой запоминающей среде (средстве) 550, такой как, например, компакт-диск или полупроводниковая память со сменными дисками. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 510 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 510 обработки данных выполняет конкретную часть программы, хранящейся в памяти 540, или конкретную часть программы, хранящейся в энергонезависимой среде 550 для записи.
Блок 510 обработки данных рассчитан на обмен данными с памятью 550 посредством шины 514 данных. Блок 510 обработки данных также рассчитан на обмен данными с памятью 520 посредством шины 512 данных. Кроме того, блок 510 обработки данных рассчитан на обмен данными с памятью 560 посредством шины 511 данных. Блок 510 обработки данных также рассчитан на обмен данными с портом 590 данных путем использования шины 515 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 510 обработки данных, который выполняет программу, хранящуюся в памяти 540, или программу, хранящуюся в энергонезависимой среде 550 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления, и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения.
Группа изобретений относится к способу управления выключением автоматического сцепления (3) транспортного средства (1). При обнаружении движения транспортного средства (1) по нисходящему уклону и (или) нулевого смещения акселератора (13) инициируется снижение предела частоты вращения двигателя на первой передаче, при котором выключается сцепление (3). Предел частоты вращения двигателя на первой передаче снижают до уровня ниже той частоты, при которой установленный на транспортном средстве регулятор (20) частоты вращения двигателя на холостом ходу впрыскивает в двигатель (2) внутреннего сгорания определенное количество топлива, соответствующее положительному крутящему моменту двигателя, который равен текущему тормозящему отрицательному моменту двигателя. За счет чего общий крутящий момент на выходе двигателя (2) примерно равен нолю. Блок управления выключением автоматического сцепления транспортного средства снабжен памятью, содержащей машиночитаемую программу, при исполнении которой блоком управления осуществляются действия способа выключением автоматического сцепления (3) транспортного средства (1). Группа изобретений обеспечивает устранение эффекта ускорения транспортного средства вследствие потери крутящего момента из-за торможения двигателем, когда сцепление выключено. 2 н. и 3 з.п. ф-лы, 2 ил.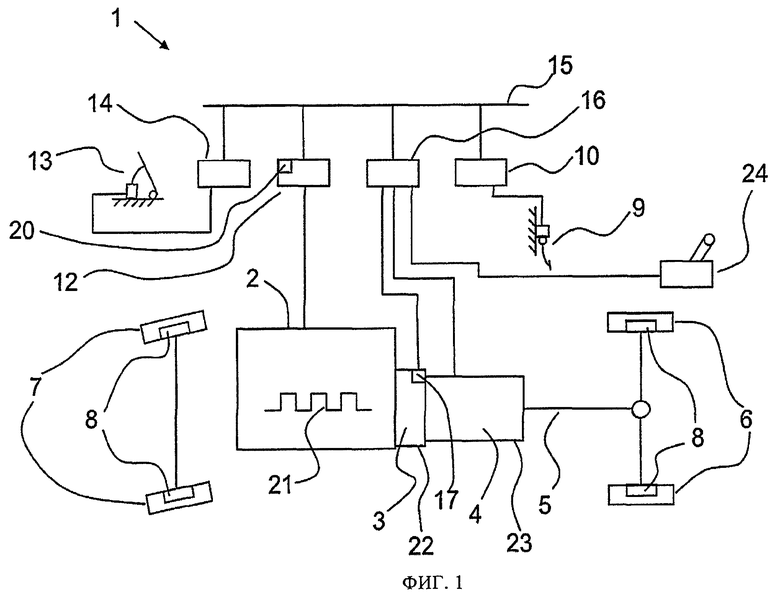
1. Способ управления выключением автоматического сцепления (3) транспортного средства (1), в котором основной функцией сцепления (3) является передача тягового усилия двигателя (2) внутреннего сгорания, установленного на транспортном средстве, на входной вал трансмиссии (4), также установленной на транспортном средстве, а частоту вращения двигателя регулируют посредством акселератора (13), и при осуществлении которого инициируют снижение предела частоты вращения двигателя на первой передаче, при котором выключается сцепление (3), при обнаружении движения транспортного средства (1) по нисходящему уклону и нулевого смещения акселератора (13), и предел частоты вращения двигателя на первой передаче снижается до частоты, при которой установленный на транспортном средстве регулятор (20) частоты вращения двигателя на холостом ходу впрыскивает определенное количество топлива, соответствующее положительному крутящему моменту двигателя, который равен текущему тормозящему отрицательному моменту двигателя, за счет чего общий крутящий момент на выходе двигателя (2) примерно равен нулю.
2. Способ по п.1, отличающийся тем, что предел частоты вращения двигателя на первой передаче снижают до уровня ниже частоты, при которой установленный на транспортном средстве (1) регулятор (20) частоты вращения двигателя на холостом ходу приводится в действие и начинает впрыскивать топливо в двигатель (2) внутреннего сгорания.
3. Способ по п.1, отличающийся тем, что снижение предела частоты вращения двигателя на первой передаче инициируют только при дополнительном условии обнаружения легкого нажатия или отсутствия нажатия на педаль (9) рабочего тормоза транспортного средства (1).
4. Способ по п.3, отличающийся тем, что легкое нажатие соответствует смещению педали (9) рабочего тормоза на величину до 25% от общего возможного смещения.
5. Блок управления выключением автоматического сцепления транспортного средства, снабженный памятью, содержащей машиночитаемую программу, при исполнении которой блоком управления осуществляются действия способа по п.1.
| WO 2004113113 A1, 29.12.2004 | |||
| Приспособление для спуска жидкости из насосных труб | 1947 |
|
SU71039A1 |
| US 2003144114 A1, 31.07.2003 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗАПОЛНИТЕЛЯ | 1994 |
|
RU2099301C1 |
| АВТОМОБИЛЬ | 1998 |
|
RU2202480C2 |

