Изобретение относится к установке непрерывной разливки, содержащей, по меньшей мере, один многофункциональный робот, предпочтительно, по меньшей мере, два многофункциональных робота для выполнения нескольких различных управляемых процессором или автоматических вмешательств в установку непрерывной разливки. В установке непрерывной разливки выделена, по меньшей мере, одна рабочая зона, и для каждой зоны предусмотрен, по меньшей мере, один многофункциональный робот. Многофункциональный робот расположен на поворотном рычаге поворотного устройства.
Многофункциональные роботы используются в установках непрерывной разливки для выполнения с высокой точностью трудных для обслуживающего персонала и особенно опасных работ в ближней зоне расплавленного металла и при воздействии жары и пыли. Такие многофункциональные роботы в соответствии с действительной потребностью в рабочей ситуации настраиваются на выполнение ряда различных работ в зоне их действия. Многофункциональный робот предпочтительно выполнен в виде 6-осного робота.
Область применения охватывает все виды установок непрерывной разливки для изготовления металлического прутка любого поперечного сечения из жидкого металла, в частности из расплавленной стали. Предпочтительно они являются одно- или многопрутковыми установками разливки для изготовления металлических прутков с плоским, ленточным или сортовым поперечными сечениями и металлических прутков с любыми профильными поперечными сечениями.
Многофункциональный робот указанного вида уже известен из WO 2005/118182 А1. Для этого робота предусмотрен собственный механизм для перемещения и путь перемещения для обеспечения возможности занятия различных положений. Согласно одному частному варианту выполнения, для этого механизма для перемещения дополнительно предусмотрен поворотный механизм с кронштейном, на выступающем концевом участке которого расположен многофункциональный робот. С помощью этой системы многофункциональный робот можно не только перемещать в определяемое механизмом для перемещения положение использования, но также поворачивать с помощью поворотного рычага между двумя или более рабочими зонами.
Из US 5 360 051 или ЕР 0 371 482 В1 известен робот на разливочной площадке установки непрерывной разливки, который установлен там неподвижно и снабжен устройством распознавания и оценки изображений для распознавания рабочей области в зоне кристаллизатора для непрерывной разливки. В частности, этот робот предназначен для подачи флюса, вдувания инертного газа, удаления шлаковой настыли и для определения ненормального состояния уровня ванны. Существенным недостатком этой системы является стационарное расположение в ближней зоне кристаллизатора и связанные с этим препятствия для обслуживающего персонала в случае внезапных неисправностей в разливке, которые требуют быстрого и концентрированного на проблеме вмешательства.
Из JP-A 5-169206 и JP-A 3-353900 известны многофункциональные роботы для герметизации затравки в кристаллизаторе установки непрерывной разливки перед началом разливки, при этом каждый из этих роботов установлен с возможностью перемещения на рельсовом транспортном средстве на разливочной площадке между положением использования и положением ожидания. В JP-A 07-01639 также показан многофункциональный робот, который установлен на подвижной раме рельсового транспортного средства и предназначен специально для смены разливочных труб. Кроме того, из JP-A 3-071959 известно расположение с возможностью перемещения двух роботов на двух отдельных рельсовых путях, которые независимо друг от друга выполняют работы у литейного ковша и у распределительного бака. Хотя установленные на рельсовом транспортном средстве роботы обеспечивают перемещение роботов в зону отвода назад на разливочной площадке, за счет чего улучшается доступ обслуживающему персоналу, однако все еще остаются рельсы, которые представляют опасность спотыкания и несчастных случаев для обслуживающего персонала. За счет связи с поверхностью такие рельсовые системы при неисправностях разливки являются весьма уязвимыми за счет выходящей жидкой струи.
Известно также расположение в разливочной установке автоматических устройств, которые на основе своей конструкции выполняют исключительно одну единственную работу. Такое устройство известно, например, из US-A 5 067 553, которое содержит устройство для подачи флюса на кронштейне поворотной башни. Флюс после обнаружения горячей верхней поверхности ванны направляется с помощью подвижного захватного рычага из резервуара для флюса через гибкий трубопровод на верхнюю поверхность ванны.
Поэтому в основу данного изобретения положена задача устранения недостатков известного уровня техники и создания установки непрерывной разливки, по меньшей мере, с одним многофункциональным роботом, в которой с помощью нескольких роботов можно точно и автоматизированно выполнять множество постоянно повторяющихся работ в установке непрерывной разливки, без создания помех для доступа обслуживающего персонала к литейной установке или возникновения дополнительной опасности несчастных случаев за счет многофункциональных роботов. Кроме того, многофункциональные роботы должны быть расположены так, что они при неисправностях в работе, например при выливающемся расплавленном металле, подвергались, возможно, меньшему риску повреждения.
Эта задача решена, исходя из устройства указанного в начале вида, за счет того, что один или каждый многофункциональный робот расположен на поворотном рычаге закрепленной на разливочной площадке установки непрерывной разливки поворотной колонны и с помощью поворотного рычага может поворачиваться между отведенным назад положением и рабочим положением.
При определении нескольких рабочих зон в установке непрерывной разливки существенное значение имеет пространственное разграничение этих рабочих зон относительно друг друга и определение рабочего положения многофункционального робота в каждой рабочей зоне. Под рабочим положением понимается в данном случае одно или несколько основных положений, которые занимает многофункциональный робот относительно разливочной установки. Для этого он находится на поворотном рычаге поворотной колонны, при этом в первом варианте выполнения поворотного рычага первая поворотная ось многофункционального робота проходит параллельно продольной оси поворотного рычага поворотной башни и на расстоянии от нее. Во втором варианте выполнения поворотного рычага он образован системой параллельных рычагов, и первая поворотная ось многофункционального робота проходит перпендикулярно поворотным осям параллельных рычагов. Возможна также комбинация обеих вариантов выполнения. За счет соответствующего выбора длины поворотного рычага поворотная колонна устанавливается вне непосредственной близости от рабочей зоны соответствующего многофункционального робота и обеспечивает после поворота многофункционального робота в его отведенное назад положение беспрепятственный доступ в его рабочую зону обслуживающему персоналу литейной установки. Если одному многофункциональному роботу соответствует несколько рабочих положений, то они находятся на окружности поворота поворотного рычага, которая определяет положение многофункционального робота.
При этом целесообразными являются многие основные формы выполнения поворотной колонны с поворотным рычагом. Поворотный рычаг может быть неподвижно соединен с вращаемой поворотной колонной, при этом поворотная колонна опирается на поворотную опору и поворотная колонна снабжена поворотным приводом, содержащим двигатели и передачу. Кроме того, поворотный рычаг может быть установлен с возможностью поворота на поворотной колонне, и при этом поворотный рычаг снабжен поворотным приводом. В-третьих, имеется возможность, что поворотный рычаг образован системой параллельных рычагов, при этом система параллельных рычагов снабжена поворотным приводом.
Для одного многофункционального робота могут быть также предназначены две или более рабочих зон. За счет этого, с одной стороны, обеспечивается, что один многофункциональный робот может выполнять функцию другого многофункционального робота, например, в случае его выхода из строя, и, с другой стороны, можно при соответственно перекрывающейся дальности действия смежных многофункциональных роботов выполнять в зависимости от рабочей ситуации перегруппировку работ отдельных роботов.
Для обеспечения возможности позиционирования нескольких многофункциональных роботов в оптимальных рабочих положениях целесообразный вариант выполнения состоит в том, что, по меньшей мере, один многофункциональный робот расположен на поворотном рычаге поворотной колонны в таком положении по высоте, которое отличается от положения по высоте многофункционального робота на другом поворотном рычаге поворотной колонны.
Положение по высоте многофункционального робота может быть также изменяемым, если поворотная колонна выполнена в виде подъемного элемента. Это можно осуществлять, например, за счет расположения подъемных цилиндров или за счет телескопической конструкции подъемной колонны.
Для каждого многофункционального робота предназначена зона снабжения для приема и складывания инструментов, рабочих средств и т.п. Эта зона снабжения содержит, например, магазины, в которых расположены инструменты, применяемые материалы и рабочие средства с возможностью однозначного распознавания и захвата с помощью захватных инструментов и датчиков многофункционального робота и в которые при необходимости их можно снова укладывать. Эти зоны снабжения расположены в расширенном за счет поворотной колонны радиусе действия многофункционального робота.
Согласно одному целесообразному варианту выполнения, зона снабжения может быть также расположена на поворотном рычаге поворотной колонны, и при этом эта зона снабжения может предпочтительно поворачиваться между положением использования в радиусе действия многофункционального робота и положением комплектации. При этом зона снабжения может быть расположена на втором поворотном рычаге поворотной колонны, которая уже имеет один поворотный рычаг с роботом, при этом оба поворотных рычага могут поворачиваться предпочтительно независимо друг от друга. Однако зона снабжения может быть расположена также на поворотном рычаге отдельной поворотной колонны, при этом положение использования этой зоны снабжения лежит в радиусе действия одного или нескольких многофункциональных роботов.
Выбор рабочих зон в установке непрерывной разливки осуществляется, с одной стороны, с точки зрения имеющегося пространства, а с другой стороны, в зависимости от планируемого времени использования многофункционального робота в соответствующей рабочей зоне. Дополнительно к этому, на выбор существенно влияет, в частности, при дооборудовании имеющихся установок непрерывной разливки, существующие конструктивные особенности.
Например, можно предложить рабочие зоны для существенных основных компонентов и рабочих областей:
- окружение поворотной башни ковша,
- окружение разливочного ковша, в частности зона защитной трубы и шиберного затвора ковша и т.д.,
- окружение распределительного бака, в частности зона погружной разливочной трубы и шиберного затвора ковша или распределительной пробки и т.д.,
- окружение кристаллизатора, в частности наблюдение за уровнем ванны, подача флюса, измерение температуры и т.д.,
- машина огневой резки, в частности, для направления горелки, местного охлаждения, проверки поверхности и т.д.,
- окружение средств для снятия грата и маркировки, в частности, для удаления грата от огневой резки, выполнения маркировки,
- контроль качества в выходной зоне установок непрерывной разливки, в частности оптическая проверка, пламенная очистка, взятие проб и т.д.
В многопрутковых установках непрерывной разливки такие рабочие зоны могут быть заданы для каждого прутка по отдельности или в целом для нескольких прутков.
Внутри рабочих зон для соответствующего многофункционального робота имеется множество работ. Например, для рабочих зон «окружение разливочного ковша», «окружение распределительного бака» и «окружение кристаллизатора» можно указать следующие возможные работы.
Работы в окружении разливочного ковша:
- определение положения разливочного ковша;
- приведение в действие затвора разливочного ковша,
- закрепление и удаление защитной трубы,
- присоединение и отсоединение трубопроводов для сред и сцеплений.
Работы в окружении распределительного бака:
- определение положения разливочного ковша;
- закрепление и удаление защитной трубы,
- открывание ковша с помощью кислородного копья;
- чистка защитной трубы,
- замена защитной трубы,
- измерение температуры распределительного бака,
- взятие пробы в распределительном баке,
- подача флюса в распределительный бак,
- измерение уровня ванны в распределительном баке.
Работы в окружении кристаллизатора:
- определение положения распределительного бака,
- взятие пробы в кристаллизаторе,
- подача флюса в кристаллизатор,
- предварительное нагревание разливочной трубы,
- замена разливочной трубы,
- удаление шлака из кристаллизатора,
- вставление разделительных пластин при безостановочной разливке «плавка на плавку»,
- охлаждение конца прутка или чистка кристаллизатора у разливочного конца,
- установка и удаление устройств защиты от брызг,
- проведение измерений температуры.
Частичное перекрытие работ относительно рабочих зон обеспечивает возможность объединения рабочих зон, соответственно, их обработку с помощью многофункциональных роботов, которые находятся в смежных рабочих зонах.
Многофункциональные роботы и несущие их поворотные колонны, и поворотные рычаги выполнены предпочтительно модульно. Они образуют блоки, которые можно произвольно взаимозаменять, за счет чего также при выполняемой разливке можно выполнять быструю замену и ремонт агрегатов.
Многофункциональный робот целесообразно снабжен устройством приема и передачи данных, и оно соединено с центральным управляющим устройством или управляющей ЭВМ установки непрерывной разливки.
Другие преимущества и признаки данного изобретения следуют из приведенного ниже подробного описания не имеющих ограничительного характера примеров выполнения со ссылками на прилагаемые чертежи, на которых схематично изображено:
фиг.1а - зона жидкой фазы установки непрерывной разливки с расположением, согласно изобретению, трех многофункциональных роботов, на виде спереди;
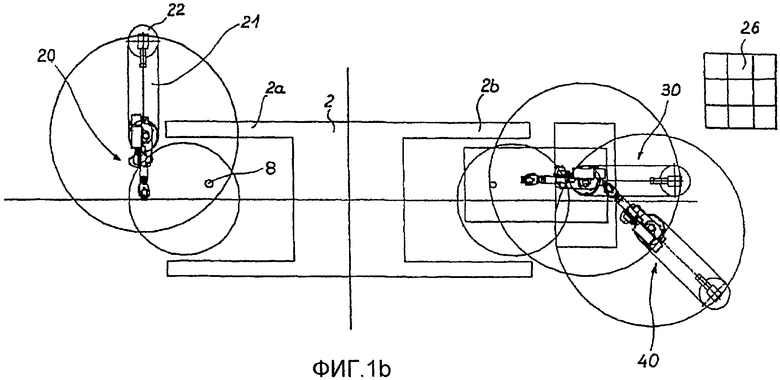
фиг.1b - зона жидкой фазы установки непрерывной разливки с расположением, согласно изобретению, трех многофункциональных роботов, согласно фиг.1а, на виде сверху;
фиг.2а - зона жидкой фазы установки непрерывной разливки с расположением, согласно изобретению, четырех многофункциональных роботов, на виде спереди;
фиг.2b - зона жидкой фазы установки непрерывной разливки с расположением, согласно изобретению, четырех многофункциональных роботов, согласно фиг.2а, на виде сверху;
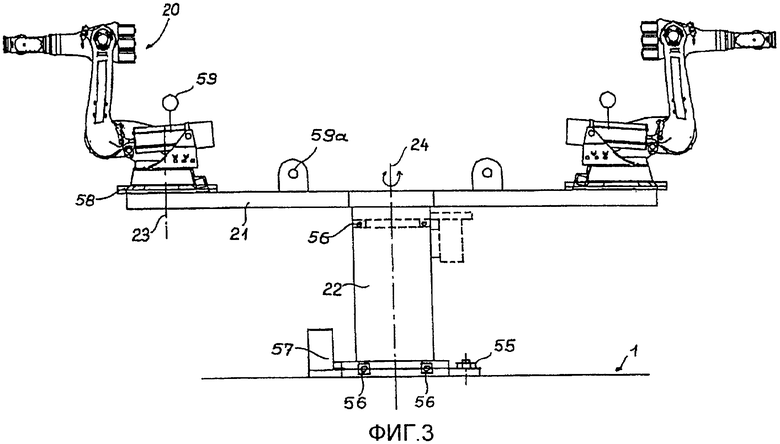
фиг.3 - поворотная колонна с поворотным рычагом в одном возможном основном варианте выполнения;
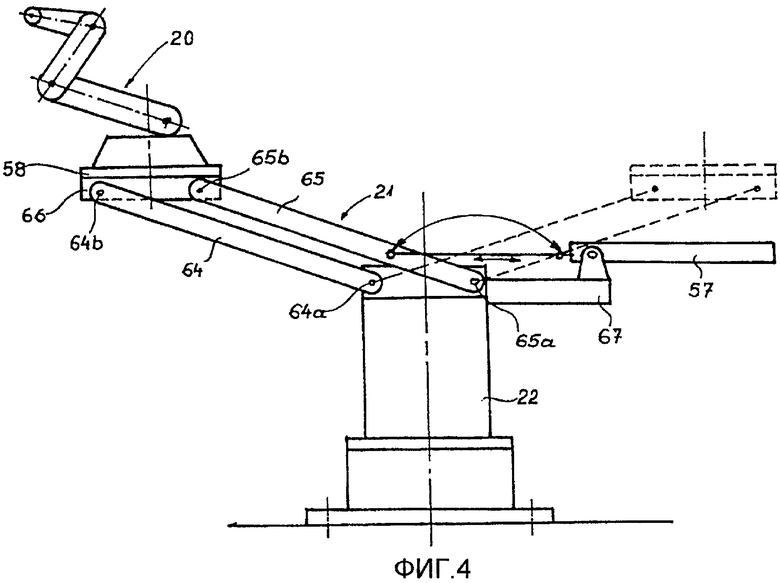
фиг.4 - поворотная колонна с поворотным рычагом в другом возможном основном варианте выполнения;
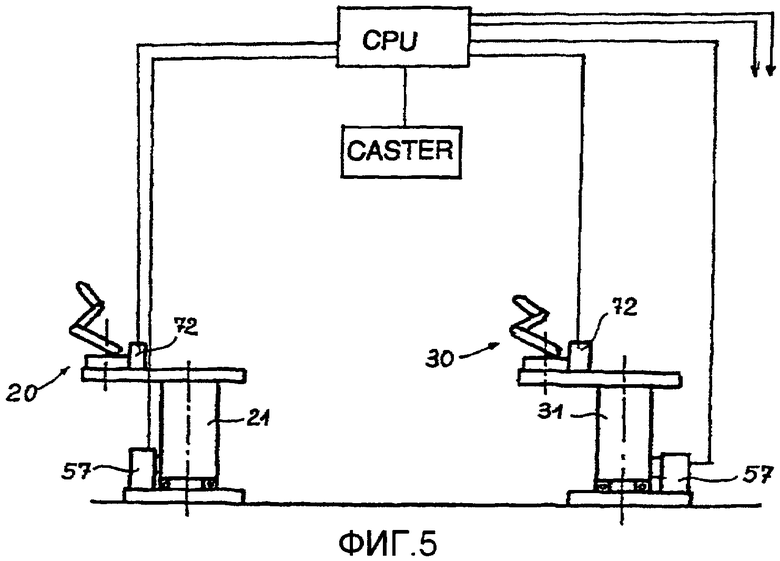
фиг.5 - схема включения многофункционального робота в плоскость управления процессом регулирования установки.
На фиг.1а и 1b схематично показаны ситуации на разливочной площадке установки непрерывной разливки, применяемой, например, при изготовлении стального прутка с плоским поперечным сечением.
На разливочной площадке 1 установки непрерывной разливки установлена ковшовая поворотная башня 2 с возможностью поворота вокруг вертикальной оси 3. В направленных друг от друга вилочных рычагах 2а, 2b подвешены разливочные ковши 4, 5 для снабжения разливочной установки стальным расплавом. Разливочный ковш 5 находится в положении разливки над распределительным баком 6, который, в свою очередь, находится в положении разливки над кристаллизатором 7 непрерывной разливки. Во время процесса разливки стальной расплав протекает из разливочного ковша 5 через защитную трубу 8, снабженную шиберным затвором 9, в распределительный бак 6 и оттуда через погружную разливочную трубу 10, которая снабжена шиберным затвором 11, в кристаллизатор 7 непрерывной разливки. Из кристаллизатора 7 непрерывной разливки выходит, по меньшей мере, частично затвердевший стальной пруток, который обозначен изогнутой средней линией 12, и проходит известным образом через направляющие прутка установки непрерывной разливки.
Установка непрерывной разливки снабжена на разливочной площадке тремя выполненными в виде 6-осных роботов многофункциональными роботами 20, 30, 40, из которых каждый закреплен отдельно на соответствующем поворотном рычаге 21, 31, 41 поворотной колонны 22, 32, 42. Многофункциональному роботу 20 соответствует поворотная ось 23, которая лежит на расстоянии А от вертикальной поворотной оси 24 поворотной колонны 22 и определяет положение многофункционального робота относительно поворотной оси 24. На фиг.1 многофункциональный робот 20 показан в своем отведенном назад положении, а на фиг.1b - в своем рабочем положении и может в этом рабочем положении выполнять манипуляции в рабочей зоне 25 (окружении разливочного ковша) разливочного ковша 4, такие как, например, определение положения разливочного ковша или положения шиберного затвора 9 ковша и закрепление защитной трубы 8. Поворотная колонна 22 закреплена на разливочной площадке 1 предпочтительно с помощью разъемного винтового соединения, так что поворотную колонну вместе с многофункциональным роботом можно при необходимости легко удалять. Непосредственно на разливочной площадке 22 расположены магазины для размещения инструментов и рабочих средств зоны 26 снабжения. Принципиальная структурная конструкция поворотной колонны с поворотным рычагом и многофункциональным роботом является идентичной для роботов 20, 30 и 40.
Многофункциональные роботы 30 предназначены для рабочей зоны 27 (окружение распределительного бака) и могут выполнять работы в этой зоне, такие как, например, замена защитной трубы 8 на дне разливочного ковша 5 или же взятие проб в распределительном баке 6. В соответствии со своей рабочей зоной 27 в установке непрерывной разливки многофункциональный робот 30 расположен в положении 28 высоты, превышающем положение высоты многофункционального робота 20. Вполне возможно, что поворотная колонна 32 закреплена не как показано, на несущей раме 29, а что поворотная колонна 32 проходит до разливочной площадки 1 и закреплена там.
Многофункциональный робот 40 предназначен для рабочей зоны 35 (окружение кристаллизатора) и может выполнять в этой зоне работы, такие как, например, замена погружной разливочной трубы 10 или выполнение взятия пробы в кристаллизаторе 7 непрерывной разливки. Магазины зоны 26, 26а снабжения могут быть расположены как непосредственно на поворотной колонне 42, так и в стороне на разливочной площадке 1, при этом зона 26а снабжения является досягаемой как для многофункционального робота 30, так и для многофункционального робота 40.
На фиг.4 схематично показано возможное расположение четырех многофункциональных роботов на разливочной площадке установки непрерывной разливки, при этом установка непрерывной разливки может быть, с одной стороны, предназначена для изготовления очень широких плоских заготовок или же быть установкой непрерывной разливки для отливки двух или более стальных прутков. Конструктивные части, которые одинаковы на фиг.1а, 1b и на фиг.2а, 2b, обозначены одинаковыми позициями.
Как показано на фиг.2а и 2b, поворотная вокруг вертикальной оси 1 ковшовая башня 2 несет разливочные ковши 4, 5. Разливочному ковшу 4 соответствует многофункциональный робот 20 на несущем рычаге 21 поворотной колонны 22, с помощью которого можно выполнять работы в рабочей зоне 25 (окружение разливочного ковша) разливочного ковша 4, такие как, например, определение положения разливочного ковша или положения шиберного затвора 9 ковша. Окружностями 44, 45 обозначена дальность действия многофункционального робота в его отведенном назад положении и в его рабочем положении.
Робот 30 опирается на поворотный рычаг 31 поворотной колонны 32 и предназначен для рабочей зоны «окружение распределительного бака», и может выполнять в этой зоне работы, такие как, например, замена защитной трубы 8 на дне разливочного ковша 5 или взятие проб в распределительном баке 6.
Многофункциональный робот 50 опирается на поворотный рычаг 51 поворотной колонны 52, а многофункциональный робот 60 опирается на поворотный рычаг 61 поворотной колонны 62. Оба многофункциональных робота 50, 60 предназначены для рабочей зоны «окружение кристаллизатора» и могут выполнять в этой зоне работы, такие как, например, замена погружной разливочной трубы 10 или выполнение отбора проб в кристаллизаторе 5 непрерывной разливки. Как показано на фиг.2b, рабочие зоны, которые следуют из рабочего положения обоих многофункциональных роботов 50, 60, лежат рядом друг с другом и тем самым перекрывают рабочую зону у очень длинного распределительного бака 6, например, с двумя расположенными друг за другом в плоскости фиг.2а погружными разливочными трубами 10 или же рабочие зоны двух расположенных друг за другом в плоскости фиг.2а кристаллизаторами 7 непрерывной разливки.
На фиг.3 показан многофункциональный робот 20 в рабочем положении (левая половина изображения) и в отведенном назад положении (правая половина изображения). С помощью плиты 54 основания поворотная колонная 22 разъемно закреплена на разливочной площадке 1 с помощью нескольких зажимных средств 55. Поворотная колонна 22 закреплена с возможностью поворота вокруг вертикальной оси 24 на плите 54 основания через поворотную опору 56 и соединена с приводным устройством 57, в данном случае приводным двигателем (приводным электродвигателем), через неизображенную передачу. На поворотной колонне закреплен поворотный рычаг 21, который несет многофункциональный робот 20, первая поворотная ось 23 которого ориентирована параллельно поворотной оси 24. Показанный штриховыми линиями вариант конструкции поворотной колонны состоит в том, что поворотная колонна 22 выступает неподвижно из плиты 24 основания, а поворотная опора 56' расположена сразу под поворотным рычагом 21, соответственно, между поворотной колонной и поворотным рычагом, так что только поворотный рычаг 21 приводится в движение изображенным также штриховыми линиями приводным устройством 57'.
Как многофункциональный робот 20, так и поворотная колонна 22 с поворотным рычагом 21 выполнены в виде быстро заменяемых блоков. Многофункциональный робот насажен с помощью быстро разъединяемого механизма 58 типа штыкового замка на выступающий конец поворотного рычага 21, и после разъединения штыкового замка его можно поднимать с помощью подъемного устройства 59 цехового крана и перемещать в место технического обслуживания или к другому поворотному рычагу. Поворотный рычаг 21 также снабжен подъемным устройством 59а, которое после открывания зажимных средств 55 обеспечивает манипулирование поворотной колонной и поворотным рычагом.
На фиг.4 показан другой вариант выполнения поворотной колонны 22 с поворотным рычагом 21 для размещения многофункционального робота 20. Поворотная колонна 22 неподвижна, и поворотный рычаг 21 образован двумя параллельными рычагами 64, 65, которые, с одной стороны, опираются на поворотную колонну 22 с возможностью поворота вокруг горизонтальных осей 64а, 65в, а с другой стороны, опираются на несущий цоколь 66 с возможностью поворота вокруг горизонтальных осей 64b, 65b. Приводное устройство 57 образовано гидравлическим или пневматическим цилиндром и находится в зацеплении с одним из параллельных рычагов 65, при этом он в свою очередь опирается на консоль 67 поворотной колонны 22. На несущий цоколь 66 посажен многофункциональный робот 20 и закреплен с помощью быстро разъединяемого механизма 58.
На фиг.5 показано включение многофункциональных роботов 20, 30 и приводных устройств 57 поворотных колонн 21, 31 в управляющее процессом и установкой устройство 71 установки непрерывной разливки. Из неизображенных, но обычных для многофункциональных роботов измерительных и регулировочных устройств 72, таких как, например, устройства получения изображений, устройства оценки изображений, датчики пути и приводные агрегаты для отдельных поворотных осей робота, а также из приводных устройств 57 измерительные сигналы передаются в процессор управляющего установкой устройства 71, там обрабатываются, и согласованные с проведением процесса установки непрерывной разливки управляющие сигналы передаются в многофункциональные роботы 20, 30 и в приводные устройства 57.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА НЕПРЕРЫВНОЙ РАЗЛИВКИ С, ПО МЕНЬШЕЙ МЕРЕ, ОДНИМ РОБОТОМ И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТАНОВКИ НЕПРЕРЫВНОЙ РАЗЛИВКИ С ИСПОЛЬЗОВАНИЕМ, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО РОБОТА | 2005 |
|
RU2363561C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА УСТРОЙСТВА ДЛЯ ТРАНСПОРТИРОВКИ РАЗЛИВОЧНОГО КОВША СО ВСТРОЕННЫМ МАНИПУЛЯТОРОМ | 2021 |
|
RU2818157C1 |
| Подъемно-поворотный стенд | 1989 |
|
SU1655657A1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ПОВОРОТНОГО СТЕНДА РАЗЛИВОЧНОГО КОВША | 2021 |
|
RU2834104C1 |
| Устройство для защиты струи при непрерывной разливке металла | 1976 |
|
SU863159A1 |
| УСТАНОВКА НЕПРЕРЫВНОЙ РАЗЛИВКИ И СПОСОБ ЛИТЬЯ, ПО ВЫБОРУ, ШИРОКОЙ ЗАГОТОВКИ ИЛИ МАКСИМАЛЬНО В ДВА РАЗА БОЛЕЕ УЗКИХ ПО СРАВНЕНИЮ С НЕЙ ЗАГОТОВОК | 2005 |
|
RU2370338C2 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| РАЙОН РАЗЛИВКИ МЕТАЛЛА | 2004 |
|
RU2265498C1 |
| ТЕЛЕЖКА ПРОМЕЖУТОЧНОГО КОВША С ПОДЪЕМНЫМ УСТРОЙСТВОМ | 2006 |
|
RU2351433C1 |
| ТЕЛЕЖКА ДЛЯ ПРОЛ^ЕЖУТОЧНОГО КОВША УСТАНОВКИ НЕПРЕРЫВНОЙ РАЗЛИВКИ МЕТАЛЛА | 1971 |
|
SU422524A1 |


Изобретение относится к металлургии. Установка непрерывной разливки снабжена, по меньшей мере одним многофункциональным роботом, предназначенным для выполнения нескольких различных управляемых или автоматизированных вмешательств. Каждой рабочей зоне установки соответствует, по меньшей мере, один многофункциональный робот. Многофункциональный робот расположен на поворотном рычаге поворотной колонны, закрепленной на разливочной площадке, и может поворачиваться с помощью поворотного рычага между отведенным назад положением и рабочим положением. При размещении двух роботов на разливочной площадке один многофункциональный робот расположен на поворотном рычаге поворотной колонны в положении, которое по высоте отличается от положения многофункционального робота на другом поворотном рычаге поворотной колонны. Обеспечивается осуществление множества постоянно повторяющихся работ без создания помех для доступа обслуживающего персонала. 10 з.п. ф-лы, 5 ил.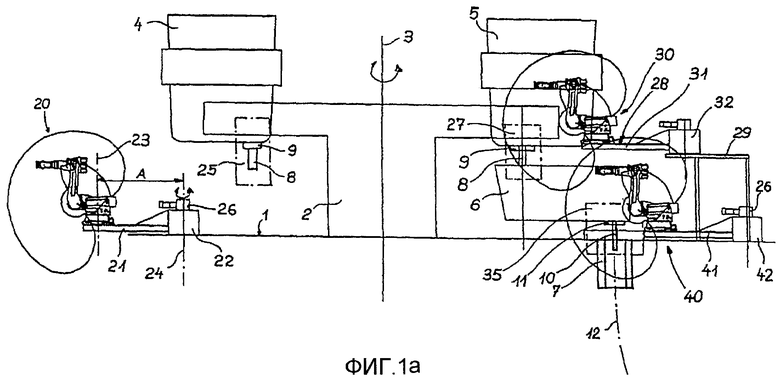
1. Установка непрерывной разливки, содержащая, по меньшей мере, один многофункциональный робот, для выполнения нескольких различных управляемых процессов или автоматических вмешательств в установку непрерывной разливки, при этом в установке непрерывной разливки определена, по меньшей мере, одна рабочая зона (25, 27, 35) и для каждой зоны предусмотрен, по меньшей мере, один многофункциональный робот, при этом многофункциональный робот расположен на поворотном рычаге, закрепленном на разливочной площадке (1) установки непрерывной разливки поворотной колонны с возможностью поворота с помощью поворотного рычага между отведенным назад положением и рабочим положением, при этом при содержании в установке непрерывной разливки, по меньшей мере, двух многофункциональных роботов (20, 30, 40, 50, 60), каждый многофункциональный робот расположен на поворотном рычаге поворотной колонны (22, 32, 42, 52, 62) с возможностью поворота с помощью поворотного рычага между отведенным назад положением и рабочим положением, при этом каждая поворотная колонна (22, 32, 42, 52, 62) установлена вне непосредственной близости от рабочей зоны (25, 27, 35) соответствующего многофункционального робота, при этом, по меньшей мере, один многофункциональный робот (20, 30, 40, 50, 60) расположен на поворотном рычаге (21, 31, 41, 51, 61) поворотной колонны (22, 32, 42, 52, 62) в положении, которое отличается по высоте от положения многофункционального робота на другом поворотном рычаге поворотной колонны.
2. Установка непрерывной разливки по п.1, отличающаяся тем, что две или более рабочих зон соответствуют одному многофункциональному роботу.
3. Установка непрерывной разливки по любому из пп.1 или 2, отличающаяся тем, что поворотный рычаг неподвижно соединен с поворотной колонной, которая снабжена приводным устройством (57).
4. Установка непрерывной разливки по любому из пп.1 или 2, отличающаяся тем, что поворотный рычаг опирается с возможностью поворота на поворотную колонну и снабжен приводным устройством (57).
5. Установка непрерывной разливки по любому из пп.1 или 2, отличающаяся тем, что поворотный рычаг образован системой (64, 65, 66) параллельных рычагов, которая снабжена приводным устройством (57).
6. Установка непрерывной разливки по любому из пп.1 или 2, отличающаяся тем, что поворотная колонна выполнена в виде подъемного элемента.
7. Установка непрерывной разливки по любому из пп.1 или 2, отличающаяся тем, что каждому многофункциональному роботу соответствует зона (26, 26а) снабжения для размещения и хранения инструментов, рабочих средств.
8. Установка непрерывной разливки по п.7, отличающаяся тем, что зона снабжения расположена на поворотном рычаге и предназначена для поворота предпочтительно между положением использования в радиусе действия многофункционального робота и положением комплектации.
9. Установка непрерывной разливки по любому из пп.1 или 2, отличающаяся тем, что определенные рабочие зоны содержат, по меньшей мере, одну, предпочтительно, по меньшей мере, две, из возможных рабочих зон:
окружение поворотной башни ковша,
окружение разливочного ковша, в частности зона защитной трубы,
окружение распределительного бака,
окружение кристаллизатора,
машина огневой резки,
окружение средств для снятия грата и маркировки,
контроль качества.
10. Установка непрерывной разливки по любому из пп.1 или 2, отличающаяся тем, что многофункциональный робот и поворотная колонна с поворотным рычагом образуют заменяемые блоки, снабженные механизмом (58) быстрого разъединения.
11. Установка непрерывной разливки по любому из пп.1 или 2, отличающаяся тем, что, по меньшей мере, один многофункциональный робот снабжен устройством передачи и приема данных, которое соединено с центральным управляющим устройством или вычислительной машиной установки непрерывной разливки.
| US 5067553 A, 26.11.1991 | |||
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ЗЕРНИСТЫХ | 0 |
|
SU371482A1 |
| US 5360051 A, 01.11.1994 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

