Изобретение относится к установке непрерывной разливки с, по меньшей мере, одним роботом для выполнения управляемых процессами или автоматизированных операций захватов на установке непрерывного разлива и доступов к соответствующим вспомогательным устройствам. Кроме того, изобретение относится к способу функционирования установки непрерывной разливки с использованием робота.
Заявленное изобретение распространяется на все типы установок непрерывной разливки, в которых расплавленный металл из резервуара для расплава, например разливочного ковша, через распределительный бак подается в охлажденный кристаллизатор, формуется там при интенсивном охлаждении для получения, по меньшей мере, частично отвержденного прессованного изделия произвольного поперечного сечения, которое непрерывно выводится из установки непрерывной разливки. В зависимости от характеристики используемых кристаллизаторов установки непрерывной разливки могут быть оснащены вибрирующими трубчатыми кристаллизаторами и кристаллизаторами прямоугольного сечения, гусеничными кристаллизаторами, вращающимися валками-кристаллизаторами с боковыми пластинами (двухвалковые установки непрерывной разливки) или кристаллизаторами с бесконечными лентами конвейера. Прессованные изделия могут иметь поперечные сечения сляба, тонкого сляба, полосы, обжатого слитка или прокатной заготовки или любые другие поперечные сечения чернового профиля любых размеров.
Роботы применяются в установках непрерывного разлива для выполнения периодически повторяющихся работ и при устранении помех в процессе производства на опасных участках, на которых обслуживающий персонал подвергается действию высоких температур ввиду наличия жидкого металла и отлитых прессованных изделий или распылителей шлака и металла. Роботы уже используются на открытых кристаллизаторах непрерывной разливки для наблюдения поверхности разливочного ковша, для устранения припекшихся слоев осадка на внутренних сторонах стенок кристаллизаторов для засыпки порошкообразного флюса, для измерений температуры и взятия проб и т.п. Кроме того, роботы используются для замены защитных труб, замены заливочных труб, для замены задвижек шиберного затвора и для продувки выпускного отверстия в распределительных ковшах и разливочных ковшах. Кроме того, известно применение роботов для контроля отлитых прессованных изделий или отделенных слябов, обжатых слябов или прокатных заготовок и для устранения дефектов, например, посредством огневой зачистки в зоне выпуска установки непрерывной разливки.
Например, из документа ЕР-В 371482 известно использование многофункционального робота на кристаллизаторе непрерывной разливки, причем робот, с одной стороны, получает связанные с процессом литья данные от измерительных устройств на кристаллизаторе, а с другой стороны, самостоятельно получает на кристаллизаторе данные измерений, например, с помощью оптической системы распознавания и на основе этой информации устанавливает и обрабатывает план действий с распределением приоритетов. При этом речь идет о стационарном роботе, место размещения которого специальным образом выбрано для использования на кристаллизаторе и который вследствие этого непригоден для выполнения других необходимых операций в зонах установки непрерывного разлива, смежных с зоной кристаллизатора непрерывной разливки.
Роботы, предназначенные для использования в одной рабочей зоне на установке непрерывной разливки, также известны из следующих документов: US-A 5067555, JP-A 5-169206, JP-A 9-109100 и JP-A 5-293615.
Масштабное использование робототехники на разливочной площадке установки непрерывной разливки приводило до сих пор к скоплению подобных роботов и к ухудшению возможностей наблюдения процессов в условиях ограниченного пространства. Из JP-А 3-71959 известно использование двух роботов на разливочной площадке многоручьевой установки непрерывной разливки, причем с каждым роботом соотнесен путь перемещения, и робот может занимать на нем рабочее положение, чтобы на большом лотковом распределителе заменять заливочные трубы или на выпускных отверстиях распределительного ковша или заливочных трубах провести работы по очистке. С каждым роботом соотнесена ограниченная рабочая зона, причем функционирование робота в пределах рабочей зоны другого робота невозможно, так что при отказе одного робота другой робот не может взять на себя выполнение этих работ, и требуется вмешательство обслуживающего персонала в функционирование установки непрерывной разливки. В целом, из-за использования множества роботов увеличиваются расходы на инвестиции и производственные расходы, не обеспечивая при этом лучшей готовности к работе отдельных роботов.
Задачей настоящего изобретения является устранение этих недостатков и проблем известного уровня техники и создание установки непрерывной разливки с использованием, по меньшей мере, одного робота вышеописанного типа и способа функционирования установки непрерывной разливки с использованием робота, с помощью которого могут выполняться различные операции на установке непрерывной разливки на различных рабочих позициях, которые находятся вне дальности действия одной единственной позиции использования одного робота.
Другой целью настоящего изобретения является повышение степени загрузки и готовности к применению одного или более используемых роботов.
Указанная задача в соответствии с изобретением решается тем, что установке непрерывной разливки придан путь перемещения, робот оснащен механизмом для перемещения и механизм для перемещения управляется с возможностью перемещения на пути перемещения, при этом на пути перемещения установлена, по меньшей мере, одна позиция парковки и, по меньшей мере, две позиции использования для робота, и каждой позиции использования соответствует рабочая зона, достижимая только из этой позиции использования, на установке непрерывной разливки, причем расстояние между каждой позицией использования робота и соответствующей рабочей зоной или зоной обслуживания определяется между минимальной и максимальной дальностью действия манипулятора робота, при этом робот оснащен устройством передачи данных и приема данных, которое связано с центральным устройством управления или вычислителем процесса установки непрерывной разливки посредством сигнально-технических средств.
За счет определения пути перемещения на установке непрерывной разливки или в отдельных зонах установки непрерывной разливки, который ведет мимо множества потенциальных рабочих зон таким образом, что эти рабочие зоны лежат в зоне достижимости из определенных позиций использования робота, перемещающегося по пути перемещения, реализуется ограниченная, только единственная возможность использования робота и создается существенно более экономичная возможность его использования. В зависимости от потребностей робот может направляться из центрального устройства управления или вычислителя процесса установки непрерывной разливки в любую позицию использования и там выполнять необходимые действия.
Позиции использования для робота определяют местоположения робота вдоль пути перемещения, исходя из которых одна или более рабочих зон на установке непрерывной разливки находятся в пределах дальности действия захватов робота. В формах выполнения робота, при которых стойка робота неподвижно или с возможностью поворота вокруг вертикальной оси закреплена на механизме перемещения, позиции использования робота на пути перемещения определяются только положением механизма перемещения. В случае форм выполнения робота, при которых на механизме перемещения размещен поворотный механизм со стрелой, и собственно робот закреплен только на выступающем конце стрелы для определения позиции использования робота, дополнительно к позиции механизма перемещения имеет значение еще угол поворота стрелы поворотного механизма.
Рабочие зоны робота представляют собой пространственные зоны или отдельные места на установке непрерывной разливки, где предпринимаются действия с помощью робота, исходя из определенной позиции использования.
Зоны обслуживания содержат, с пространственной точки зрения, площадку для складирования со вспомогательным оборудованием, таким как магазины инструментов, магазины вспомогательного материала и подобное оборудование, установленные позиции для захвата и укладки инструментов, запасных частей и вспомогательного материала роботом. Во вспомогательном оборудовании хранятся, во-первых, инструменты для робота, которые необходимы для выполнения захватов, например клещи, измерительные зонды, шлифовальные головки, во-вторых, запасные части для установки непрерывной разливки, такие как заливочные трубы, задвижки шиберного затвора, и, в-третьих, вспомогательный материал для текущей работы установки непрерывной разливки, например порошкообразный флюс. Магазины инструментов и магазины вспомогательного материала, предусмотренные в соответствующих зонах обслуживания, могут быть образованы стационарным или перемещаемым вспомогательным оборудованием, причем перемещаемое вспомогательное оборудование, например вагонетка со вспомогательным материалом, в каждом конкретном случае, только при необходимости, подается в зону обслуживания определенной позиции использования и пополняется в стороне от своей позиции обслуживания.
В качестве позиции парковки на пути перемещения определена позиция для робота, в которой он находится, когда не выполняет никаких операций захвата и ожидает нового сигнала использования от центрального устройства управления или вычислителя процесса. Если с путем перемещения соотнесено несколько роботов, то соответственно устанавливается несколько позиций парковки. В случае двух роботов, обе позиции парковки предпочтительно находятся на противолежащих концах пути перемещения.
Выполнение управляемых процессом или автоматизированных захватов роботом включает в себя также, в качестве содействия, возможность дистанционно вручную управляемого захвата с участием обслуживающего персонала. Такие дистанционно вручную управляемые захваты могут выполняться посредством пульта управления или иных переносных приборов управления.
Путь перемещения для робота предпочтительно образован в виде рельсового пути или, по меньшей мере, одного рабочего рельса по типу монорельсовой подвесной транспортной линии или подкранового пути. Подвод к предварительно определенным позициям использования реализуется соответствующими техническими средствами управления (датчиками положения, системами отслеживания пути).
Чтобы иметь возможность обслуживания рабочих зон на установке непрерывной разливки, целесообразно, если путь перемещения имеет ответвления с использованием обычных рельсовых стрелок. Тем самым позиции использования могут устанавливаться и заполняться в стороне от основного пути перемещения, и использование нескольких роботов осуществляется без взаимных помех.
В качестве альтернативы, участки пути перемещения с помощью подъемных механизмов могут выполняться регулируемыми по высоте или с помощью поворотных механизмов могут выполняться поворотными, чтобы изменять положение использования робота на пути перемещения таким образом, чтобы обеспечивался оптимальный захват в соответствующей рабочей зоне.
Каждому роботу предоставлен механизм перемещения, на который он, в зависимости от выполнения пути перемещения, опирается или на котором он подвешен. Для увеличения его зоны использования механизм перемещения может иметь поворотный механизм робота, посредством чего поворотными позициями поворотного механизма робота определяются, по меньшей мере, две позиции использования для робота. Поворотный механизм включает в себя, предпочтительно, выступающую стрелу, на выступающем конце которой размещен робот. Стрела может быть согласована с потребностями среды использования, то есть, например, может быть выполнена с возможностью регулирования по высоте.
Предпочтительным образом, робот в своих соответствующих позициях использования закрепляется фиксирующим устройством во избежание изменений положения за счет силы реакции от захватов.
Чтобы иметь возможность выполнять захваты на установке непрерывной разливки по возможности быстро и эффективно, целесообразно, чтобы каждой позиции использования робота на пути перемещения соответствовала, по меньшей мере, одна рабочая зона на установке непрерывной разливки и зона обслуживания на вспомогательном оборудовании, например магазин инструментов или магазин вспомогательных материалов. Тем самым для робота предоставляются в распоряжение в пределах дальности действия его манипуляторов все вспомогательные средства, необходимые для выполнения захвата, не требуя выполнения дополнительных манипуляций для замены инструмента или транспортировки запасных деталей.
Путь перемещения может продолжаться вдоль всей установки непрерывной разливки и на различных уровнях по высоте и, предпочтительно, при выполнении пути перемещения в виде рабочего рельса подвесной дороги также включать в себя подъемы и уклоны. Предпочтительным образом, путь перемещения ограничен разливочной площадкой и/или выпускной зоной установки непрерывной разливки. Здесь пути перемещения расположены предпочтительно в горизонтальной плоскости.
Согласно предпочтительному варианту осуществления на пути перемещения размещены два робота, причем, предпочтительным образом, один робот в качестве основного робота выполняет захваты на установке непрерывной разливки, а второй робот используется в качестве вспомогательного робота при приоритетных коллизиях для проводимых работ и в случае помех работе основного робота. Также возможно иное распределение проводимых работ между роботами, например, путем присвоения приоритета отдельным роботам по отношению к определенным позициям использования, или их распределение возможно путем дистанционного ручного управления, что также входит в объем настоящего изобретения.
Изобретение также предусматривает способ функционирования установки непрерывной разливки с использованием, по меньшей мере, одного робота, устанавливаемого на пути перемещения между позицией парковки и, по меньшей мере, двумя позициями использования, отличающийся тем, что на робот передаются управляющие сигналы от вычислителя процесса или центрального устройства управления, и в соответствии с этими управляющими сигналами осуществляется перемещение в выбранную позицию использования, и робот выполняет автоматические операции захвата на установке непрерывной разливки, причем управляющие сигналы для операций захватов, которые должны выполняться на установке непрерывной разливки, выдаются роботу вычислителем процесса или центральным устройством управления в последовательности приоритета проводимых операций захвата.
Вычислитель процесса установки непрерывной разливки или центральное устройство управления определяет использование робота и управляет им, причем проводимые действия определяются с учетом качества производимой продукции. Основу для выявления приоритета создает непрерывная диагностика процесса непрерывной разливки, тем самым непрерывно поступающие данные измерений и данные математического моделирования в сопоставлении с заданными данными.
Также и самим роботом проводятся наблюдения состояния на установке непрерывной разливки в течение процесса разливки и сбор данных. Эти измеренные данные передаются в вычислитель процесса или центральное устройство управления, обрабатываются вычислителем процесса или центральным устройством управления, и результаты этой оценки данных преобразуются в управляющие сигналы для робота или установки непрерывной разливки.
При использовании, по меньшей мере, двух роботов, имеющих возможность перемещения на пути перемещения, первый робот, имеющий возможность перемещения на пути перемещения, принимает в качестве основного робота (ведущего робота) все управляющие сигналы и выполняет операции захвата на установке непрерывной разливки, а другой робот, имеющий возможность перемещения на пути перемещения, в качестве вспомогательного робота (ведомого робота) предпочтительным образом располагается на позиции парковки.
В случае коллизии приоритетов управляющих сигналов основной робот и вспомогательный робот приводятся в действие, и оба робота, при условии исключения взаимных препятствий, направляются на соответствующие позиции использования.
Другие преимущества и признаки заявленного изобретения поясняются в последующем описании иллюстративных примеров выполнения со ссылками на чертежи, на которых показано следующее.
Фиг. 1 - схематичное представление возможностей использования одного или двух роботов на разливочной площадке установки непрерывной разливки.
Фиг. 2 - поворотный механизм робота с двумя позициями использования робота на виде спереди.
Фиг. 3 - поворотный механизм робота согласно фиг. 2 с двумя позициями использования на разливочной площадке на виде сверху.
Фиг. 4 - путь перемещения робота с участком пути, имеющим возможность подъема и спуска.
Фиг. 5 - путь перемещения робота с участком пути перемещения, имеющим возможность поворота в горизонтальной плоскости.
На разливочной площадке 1 установки непрерывной разливки, топология которой никоим образом не ограничена, контурными линиями показан разливочный ковш 2 со стаканом 3 ковша (защитной трубой) и расположенным под ним распределительным баком 4 с погружной заливочной трубой 5, которая выступает в кристаллизатор 6 непрерывной разливки. Штрихпунктирной линией показан другой распределительный бак 4' в положении готовности на разливочной площадке 1.
На этой разливочной площадке имеется множество возможностей для выполнения управляемых процессом автоматизированных операций захвата на установке непрерывной разливки с помощью робота, для которых необходимо использование либо нескольких стационарно расположенных роботов или, по меньшей мере, одного подвижного робота. Путь 7 перемещения на разливочной площадке 1 проложен таким образом, что множество рабочих зон А1, А2, А3, А4 может обслуживаться одним единственным роботом 8 с нескольких позиций Е1, Е2, Е3 использования вдоль пути перемещения. Робот 8 находится в положении ожидания в позиции Р1 парковки на одном конце пути 7 перемещения. Другая позиция Р2 парковки, которая также может использоваться, находится на противолежащем конце пути 7 перемещения. Зоны V1, V2, V3 обслуживания подготовлены у вспомогательного оборудования Н1, Н2, Н3 на разливочной площадке, которое соотносится с позициями Е1, Е2, Е3 использования и расположено в пределах дальности действия манипулятора 15 робота. Если соотношения площадей на разливочной площадке не допускают этого, то отдельные зоны обслуживания могут также располагаться вне дальности действия позиций использования робота. Время использования робота для реализации операции захвата увеличивается тогда, во всяком случае, на интервал времени необходимого обслуживания.
Из позиции Е1 использования робот 8 может выполнять захваты в рабочих зонах А1 (разливочный ковш) и А4 (распределитель), связанных со стаканом 3 ковша и защитной трубой, а также зоной заливки распределительного бака 4. К действиям, проводимым периодически в этих рабочих зонах, относятся, например, смена защитных труб, прожигание стакана разливочного ковша или засыпка порошкового флюса в распределительный бак. Запасные части и вспомогательные материалы, необходимые для выполнения этих захватов, например запасная защитная труба, требуемый конкретный порошковый флюс предварительно определенного качества и в определенном количестве, или горелка, берутся роботом из соответствующей зоны V1 обслуживания, где в предварительно определенных местах хранения вспомогательного оборудования Н1 обеспечен доступ к запасам этих вспомогательных материалов.
Из позиции Е2 использования робот 8 может выполнять захваты в рабочих зонах А2 (кристаллизатор) и А4 (распределитель), связанных с зоной заливки распределительного бака 4, погружной заливочной трубой 5 и отверстием со стороны входа кристаллизатора 6 непрерывной разливки. К действиям, проводимым периодически в этих рабочих зонах, относятся, например, засыпка порошкового флюса в распределительный бак, замена погружной заливочной трубы, прожигание выпускного отверстия распределителя, засыпка порошкового флюса в кристаллизатор, наблюдение за уровнем металла в кристаллизаторе, взятие пробы из кристаллизатора и т.д. Вспомогательные материалы и запасные части, необходимые для выполнения этих захватов, например порошковый флюс, согласованный с качеством отливаемой стали и текущими условиями разливки, погружные заливочные трубы, вспомогательные фурмы для определения температуры и содержания углерода и т.д., берутся роботом из вспомогательного оборудования Н2 в зоне V2 обслуживания.
Исходя из позиции Е3 использования робот 8 может выполнять захваты на дополнительном распределительном баке 4' в рабочей зоне А3 (стенд для замены распределителя), причем необходимые вспомогательные материалы берутся роботом из вспомогательного оборудования Н3 в зоне V3 обслуживания.
Позиция Р2 парковки предоставлена в распоряжение роботу в качестве второй позиции парковки, если на разливочной площадке предусмотрен только один робот. В качестве альтернативы, на позиции Р2 парковки может находиться другой робот, ожидающий применения в рабочих операциях, благодаря чему можно осуществить более эффективный план использования. Если, например, как в рабочей зоне А1, так и в рабочей зоне А2, должны проводиться операции захвата с одинаковым приоритетом, причем обе не допускают отсрочки, то система управления или вычислитель процесса будет направлять робот 8 с его позиции Р1 парковки в позицию Е1 использования, а робот 8' с его позиции Р2 парковки - в соотнесенную с ним позицию Е2 использования.
На фиг. 2 и 3 показан робот 8 на двух позициях Е1, Е2 использования на установке непрерывной разливки. Установка непрерывной разливки обозначена пунктирными линями посредством внешних контуров разливочного ковша 2, распределительного бака 4 и кристаллизатора 6 непрерывной разливки. Путь 7 перемещения робота образован двумя рабочими рельсами 9, 9', которые проведены прямолинейно на некотором расстоянии над разливочной площадкой 12 около распределительного бака 4 и кристаллизатора 6 непрерывной разливки. На механизме 10 перемещения закреплен поворотный механизм 11 робота со стрелой 12, которая может занимать два положения, повернутые относительно друг друга на 90о и охватывающие позиции Е1, Е2 использования. На выступающем конце стрелы 12 подвешен робот, который может занимать обе позиции Е1, Е2 использования. На позиции Е1 использования стрела 12 показана штрихпунктирной линией, а на позиции Е2 использования - сплошной линией. Посредством линий 13, 14 дальности действия кардиоидной формы на фиг. 2 и линий 13', 14' дальности действия круговой формы на фиг. 3 наглядно представлены рабочие зоны А1 и А2 манипулятора 15 робота. Внутри рабочей зоны А1, которая соответствует позиции Е1 использования, обеспечивается достижимость для робота 8 всех существенных зон от разливочного ковша 2 до кристаллизатора 6. Из второй позиции Е2 использования в рабочей зоне А2 предпочтительным образом могут выполняться захваты в промежуточной зоне от распределительного бака 4 до кристаллизатора 6 непрерывной разливки и на нем самом. Роботу предоставлена позиция Р1 парковки в краевой зоне разливочной площадки. В непосредственной близости от этой позиции парковки также предусмотрена зона V1 обслуживания, из которой робот может брать все вспомогательные материалы, необходимые для его использования. Независимо от текущего процесса разливки, на этой позиции парковки без каких-либо помех надежным образом могут проводиться ручные подготовительные операции для использования робота.
На разливочной площадке 1 находится стенд 18 управления, с которого осуществляется контроль установки непрерывной разливки и, по существу, автоматизированное управление посредством вычислителя процесса или центрального устройства управления. К вычислителю процесса или центральному устройству управления, а также единственному роботу или нескольким роботам относятся устройства 20, 21 передачи и приема данных, посредством которых передается вся информация, необходимая для выполнения захватов, предпочтительно по радиоканалу.
Для того чтобы робота направить в оптимальные позиции использования, возможны различные специальные варианты выполнения пути перемещения. На фиг. 4 показан участок 22 пути 7 перемещения с возможностью подъема и спуска, по которому робот 8, для которого на чертеже показана только нижняя часть основания, поднимается в позицию Е захвата, приподнятую относительно плоскости пути перемещения. Участок 22 пути перемещения опирается на подъемные цилиндры 23 и позиционируется ими соответствующим образом. Робот 8 в своей позиции Е захвата, которая со своей стороны определяется осью поворота робота в области основания, фиксируется однозначно определенным образом по положению с помощью фиксирующего устройства 24 на участке 22 пути перемещения, и тем самым определяется точка фиксации, существенная для управления роботом.
Фиг. 5 показывает участок 27 пути, имеющий возможность поворота относительно вертикальной оси 26 поворота в предварительно определенное угловое положение, в его исходном положении, находящемся на одной прямой с путем 7 перемещения, и в повернутом положении, которое определяет для робота позиция Е использования. Участок 27 пути перемещения может проходить в горизонтальной плоскости по рельсам 29, проложенным в форме дуги окружности.
Дополнительно на пути перемещения могут выполняться ответвления с помощью стрелок, обычно применяемых на железных дорогах. На пути перемещения могут предусматриваться участки подъемов и уклонов, причем для преодоления подъемов и уклонов могут применяться, например, реечные зубчатые передачи.
Изобретение не ограничено использованием особых типов роботов. Для использования на разливочной площадке установки непрерывной разливки особенно пригодны роботы с изгибающимися манипуляторами или портальные роботы, предлагаемые многими изготовителями для самых различных возможностей использования как универсальных, так и соответственно адаптированных.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА НЕПРЕРЫВНОЙ РАЗЛИВКИ, ПО МЕНЬШЕЙ МЕРЕ, С ОДНИМ МНОГОФУНКЦИОНАЛЬНЫМ РОБОТОМ | 2006 |
|
RU2401717C2 |
| УСТАНОВКА НЕПРЕРЫВНОЙ РАЗЛИВКИ И СПОСОБ ЛИТЬЯ, ПО ВЫБОРУ, ШИРОКОЙ ЗАГОТОВКИ ИЛИ МАКСИМАЛЬНО В ДВА РАЗА БОЛЕЕ УЗКИХ ПО СРАВНЕНИЮ С НЕЙ ЗАГОТОВОК | 2005 |
|
RU2370338C2 |
| УСТАНОВКА НЕПРЕРЫВНОЙ РАЗЛИВКИ МЕТАЛЛОВ | 1992 |
|
RU2038916C1 |
| УСТАНОВКА ДЛЯ НЕПРЕРЫВНОГО ЛИТЬЯ ЗАГОТОВОК | 1994 |
|
RU2086347C1 |
| СПОСОБ НЕПРЕРЫВНОЙ РАЗЛИВКИ МЕТАЛЛОВ | 2002 |
|
RU2210457C1 |
| УСТАНОВКА НЕПРЕРЫВНОЙ РАЗЛИВКИ С КРИСТАЛЛИЗАТОРОМ ДЛЯ ЛИТЬЯ ЖИДКИХ МЕТАЛЛОВ, В ЧАСТНОСТИ СТАЛЬНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2388574C2 |
| Наклонная установка непрерывной разливки металла | 1979 |
|
SU933213A1 |
| УСТАНОВКА НЕПРЕРЫВНОЙ РАЗЛИВКИ МЕТАЛЛОВ | 1992 |
|
RU2033303C1 |
| ТЕЛЕЖКА ДЛЯ ПРОМЕЖУТОЧНОГО КОВША ПРИ НЕПРЕРЫВНОЙ РАЗЛИВКЕ МЕТАЛЛА | 1992 |
|
RU2033297C1 |
| Машина непрерывного литья заготовок | 1978 |
|
SU774783A1 |
Установка непрерывной разливки с одним или несколькими роботами для выполнения управляемых операций на установке непрерывной разливки и доступа к соответствующим вспомогательным устройствам. Для обеспечения оптимального использования робота он снабжен механизмом перемещения и управления им по заданному пути, например по монорельсовой подвесной линии. На пути перемещения установлена одна позиция парковки и две позиции использования робота, причем каждой позиции использования соответствует рабочая зона. Расстояние между каждой позицией использования робота и соответствующей рабочей зоной или зоной обслуживания определяется между минимальной и максимальной дальностью действия манипулятора робота, при этом робот оснащен устройством передачи и приема данных, которое связано с центральным устройством управления (ЦУУ) или вычислителем процесса (ВП) непрерывной разливки посредством сигнально-технических средств. Кроме того, изобретение относится к способу функционирования установки непрерывной разливки с, по меньшей мере, одним роботом, устанавливаемым на пути перемещения между позицией парковки и, по меньшей мере, двумя позициями использования. На робот передают управляющие сигналы от ВП или ЦУУ и в соответствии с ними перемещают робот в выбранную позицию использования, который выполняет в определенной последовательности необходимые технологические операции. Повышается степень загрузки и готовность к применению одного или нескольких роботов. 2 н. и 12 з.п. ф-лы, 5 ил.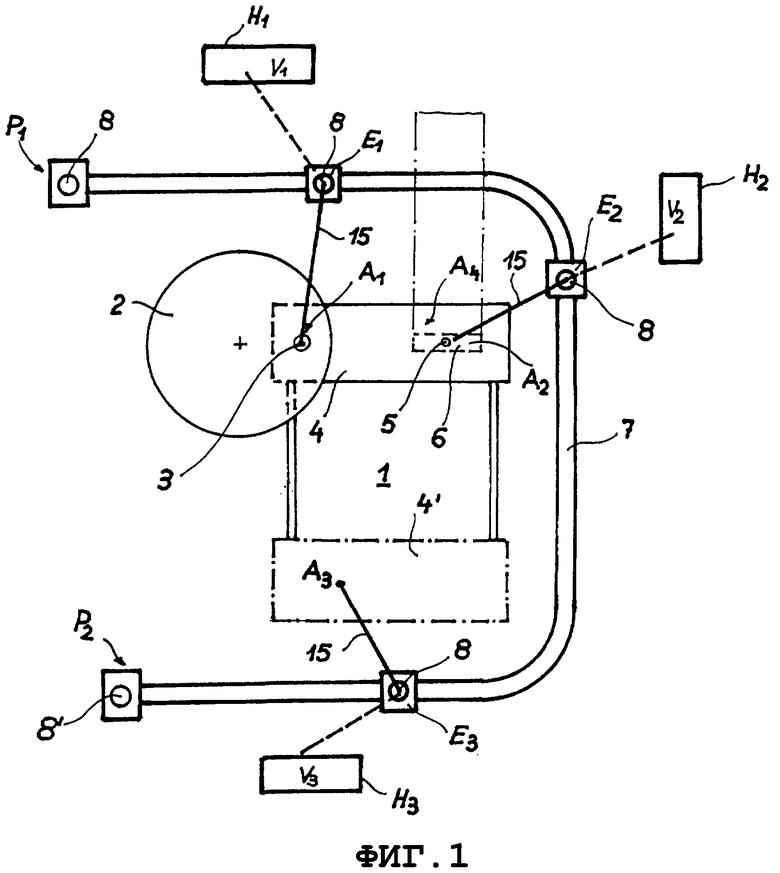
1. Установка непрерывной разливки с, по меньшей мере, одним роботом для управления процессом литья и доступа к соответствующим вспомогательным устройствам, отличающаяся тем, что робот снабжен механизмом (10) перемещения по пути (7), на котором установлена, по меньшей мере, одна позиция (Р1, Р2) для парковки и, по меньшей мере, две позиции (Е, Е1, Е2, Е3) использования робота, и каждой позиции использования соответствует рабочая зона (А1, А2, А3, А4), достижимая только из упомянутой позиции, расстояние между каждой позицией использования робота и соответствующей рабочей зоной или зоной (V1, V2, V3) обслуживания определяется между минимальной и максимальной дальностью действия манипулятора (15) робота, причем робот оснащен устройством (20, 21) передачи и приема данных, которое связано с центральным устройством управления или вычислителем (19) процесса литья посредством сигнально-технических средств.
2. Установка по п.1, отличающаяся тем, что путь (7) перемещения образован в виде рельсового пути.
3. Установка по п.1, отличающаяся тем, что путь перемещения образован от, по меньшей мере, одного рабочего рельса по типу монорельсовой подвесной транспортной линии.
4. Установка по любому из пп.1-3, отличающаяся тем, что путь (7) перемещения имеет ответвления.
5. Установка по любому из пп.1-3, отличающаяся тем, что участок (22, 27) пути (7) перемещения выполнен регулируемым по высоте или с возможностью поворота.
6. Установка по п.1, отличающаяся тем, что механизм (10) перемещения имеет поворотный механизм (11) робота, за счет чего поворотными позициями поворотного механизма робота определяются, по меньшей мере, две позиции (Е1, Е2) использования для робота, причем поворотный механизм включает в себя стрелу (12), выступающий конец которой предназначен для размещения робота (8).
7. Установка по любому из пп.1-3, отличающаяся тем, что робот в своей позиции (Е) использования зафиксирован с помощью фиксирующего устройства (24).
8. Установка по п.1, отличающаяся тем, что каждой позиции (Е, Е1, Е2, Е3) использования для робота на пути (7) перемещения соответствуют, по меньшей мере, одна рабочая зона (А1, А2, A3, А4) установки непрерывной разливки и одна зона (V1, V2, V3) обслуживания на вспомогательном оборудовании (H1, Н2, Н3), например магазин инструментов, магазин вспомогательных материалов.
9. Установка по любому из пп.1-3, отличающаяся тем, что путь (7) перемещения расположен на разливочной площадке (1), предпочтительно в горизонтальной плоскости.
10. Установка по одному из пп.1, 6 или 8, отличающаяся тем, что на одном пути (7) перемещения размещено несколько роботов, предпочтительно два робота (8, 8').
11. Способ функционирования установки непрерывной разливки с, по меньшей мере, одним роботом, устанавливаемым на пути (7) перемещения между позицией
(P1, Р2) парковки и, по меньшей мере, двумя позициями (Е, Е1, Е2, Е3) использования, отличающийся тем, что на робот передают управляющие сигналы от вычислителя (19) процесса или центрального устройства управления, и в соответствии с этими управляющими сигналами осуществляют перемещение в выбранную позицию использования, и с помощью робота выполняют автоматические операции захвата на установке непрерывной разливки, причем управляющие сигналы для операций захватов, которые должны выполняться на установке непрерывной разливки, передаются вычислителем (19) процесса или центральным устройством управления на робот в последовательности приоритета проводимых операций захвата.
12. Способ по п.11, отличающийся тем, что робот получает данные измерений на установке непрерывной разливки, эти данные измерений передаются на вычислитель (19) процесса или центральное устройство управления, обрабатываются вычислителем (19) процесса или центральным устройством управления, и результаты этой оценки данных преобразуются в управляющие сигналы для робота или установки непрерывной разливки.
13. Способ по п.11 или 12, отличающийся тем, что из, по меньшей мере, двух роботов, имеющих возможность перемещения на пути (7) перемещения, первый робот принимает в качестве основного (ведущего) робота все управляющие сигналы и выполняет операции захвата на установке непрерывной разливки, а другой робот в качестве вспомогательного (ведомого) робота предпочтительно располагается на позиции парковки.
14. Способ по п.13, отличающийся тем, что в случае неясности приоритетов управляющих сигналов основной и вспомогательный роботы приводятся в действие, и оба робота, при условии исключения взаимных препятствий, направляются на соответствующие позиции использования.
| JP 10263796 А, 06.10.1998 | |||
| US 3625490 A, 07.12.1971 | |||
| US 5277243 A, 11.01.1994 | |||
| Система поддержания уровней жидкого металла в двухручьевом кристаллизаторе установки непрерывной разливки стали | 1975 |
|
SU538813A1 |

