Изобретение относится к горному делу, в частности к системам мониторинга, оповещения и определения местоположения горнорабочих.
Известно устройство беспроводной аварийно-вызывной и информационно-технологической шахтной сигнализации и связи. Устройство содержит установленный на дневной поверхности земли передающий комплект, состоящий из блока формирования и подачи аварийного сигнала передатчика и подключенной к нему передающей антенны с заземлителями и расположенными в подземных выработках приемными комплектами, которыми оснащаются горнорабочие. Устройство работает по принципу односторонней радиосвязи между наземным передающим и подземным приемным комплектами. Недостатками такого устройства является отсутствие обратной связи между подземным и наземным оборудованием, что не позволяет удостовериться в приеме сигналов оповещения об аварийности ситуации каждым горнорабочим (патент №2112146, E21F 17/18, Е21С 35/24 от 25.06.1993 г.).
Известен комплекс "Талнах" - первый российский аппаратно-программный комплекс на основе излучающего кабеля, предназначенный для построения систем радиосвязи и автоматизации различного назначения в подземной части шахт и рудников (в том числе опасных по пыли и газу). Комплекс предназначен для создания зоны радиопокрытия в подземных выработках. Он строится на базе излучающего (радиоизлучающего) кабеля, играющего роль протяженной приемопередающей антенны. В состав излучающей кабельной сети кроме собственно кабеля входят линейные двусторонние усилители, компенсирующие затухание радиосигналов в кабеле. Комплекс «Талнах» предназначен для сбора телеметрической информации о работе излучающей кабельной сети, настройки подземного линейного оборудования. Кроме того, он позволяет определить местоположение персонала и техники в подземной части шахт и рудников. За каждым горнорабочим и каждой единицей техники, местоположение которых требуется контролировать, закрепляется абонентское устройство, которое представляет собой управляемый микро-ЭВМ приемопередатчик. Определение местоположения абонентов комплекса осуществляется линейными считывателями, устанавливаемыми в выработках шахты, а полученные данные передаются серверу системы позиционирования для построения базы данных о местоположении абонентов системы. Доступ к базе данных осуществляется с удаленных автоматизированных рабочих мест диспетчеров или инженерно-технического персонала с использованием локальной вычислительной сети шахты (рудника), модемных соединений или, при необходимости, с помощью сети Интернет. На рабочих местах устанавливается специализированное программное обеспечение. Информация представляется как в текстово-табличном виде, так и в графическом виде на планах подземных выработок. Система позволяет учитывать время работы персонала рудника под землей и экспортировать данные о спуске/подъеме сотрудников в базу данных рудника (шахты). Для учета времени работы персонала под землей используются данные от линейных считывателей системы позиционирования/табельного учета. Система обеспечивает передачу информации телеконтроля (телеуправления) шахтным контроллером автоматизированных систем диспетчерского управления со скоростью 64 кбит/с (искробезопасный интерфейс RS 485). В системе возможна организация каналов передачи данных со скоростями до 8 Мбит/с. «Талнах» был разработан российской компанией ЗАО «Компания «Информационная Индустрия» (Журнал «Топливно-энергетический комплекс», №12, 2007 год).
Недостатком комплекса «Талнах» является отсутствие независимого контроля за горнорабочими и мониторинга состояния окружающей шахтной среды, системы выработки команд тревоги и предупреждения горнорабочих, а также возможности поиска местоположения горнорабочих по индивидуальным сигналам в случае возникновения аварийной ситуации.
Известна автоматизированная система управления и контроля производственных процессов, окружающей среды и местоположения горнорабочих в подземных выработках. Система осуществляет контроль и управление технологическими процессами в подземных выработках по каналам проводной и радиосвязи в автоматическом режиме и по запросам. Система оснащена распределенными в подземной выработке датчиками состояния окружающей среды и приемниками кодированных сигналов, станцией сбора и передачи информации, ЭВМ, оснащенной специализированным программным обеспечением. Кроме того, каждый горнорабочий оснащен передатчиком кодированных радиосигналов ограниченного радиуса действия, вмонтированным в головной светильник. Положительный эффект системы основывается на возможности непрерывного контроля за состоянием окружающей среды и местоположением горнорабочих в подземных выработках путем приема и анализа сигналов в ЭВМ, поступающих с датчиков окружающей среды и передатчиков кодированных сигналов горнорабочих. Недостатками такой системы является пассивный режим работы, что исключает, во-первых, возможность оповещения каждого горнорабочего об угрозе возникновения аварии в выработке и подтверждения получения сигнала тревоги, во-вторых, реального контроля за ходом эвакуации, вследствие отсутствия обратной связи от горнорабочего к ЭВМ управления. Кроме того, ограниченный радиус действия передатчиков кодированного сигнала (как следует из описания, в целях повышения точности определения местоположения горнорабочего в штатном режиме) при возникновении завала и попадания под него горнорабочего может не привести к быстрому поиску терпящих бедствие, так как толща завала может полностью ослаблять сигнал передатчика (патент РФ №2180941, E21F 17/18, Е21С 35/24 от 2000.02.25).
Известна система контроля за состоянием подвижных объектов и их перемещением. Система содержит диспетчерский центр и аппаратуру потребителя, включающую навигационный приемник с антенной, трансивер с антенной, клавиатуру и модем, связанный с трансивером, телекамеру видеоконтроля, аудиосистему и телемонитор. В систему входит бортовой компьютер, связанный с процессором, аналого-цифровым преобразователем видеосигналов и цифроаналоговыми преобразователями аудиосигналов и видеосигналов, запоминающее устройство, телекамеру видеоконтроля и телемонитор. К интерфейсу бортового компьютера подключены также охранные датчики. Диспетчерский центр связан с аппаратурой потребителя через антенну трансивера, посредством радиоканала. Питающие входы навигационного приемника, модема, трансивера, бортового компьютера, телекамеры видеоконтроля, телемонитора и охраны датчиков подключены к блоку автономного питания. Даная система позволяет контролировать мобильные объекты, ее схемное решение позволяет оперативно перепрограммировать и изменять порядок функционирования блоков системы в зависимости от выполняемых функций (патент РФ №2122239).
Система имеет сложную конфигурацию, что обуславливает достаточно высокую стоимость и эксплуатационные расходы. Не предусмотрено сохранение и анализ изображений охраняемых объектов.
Известна система, которая содержит диспетчерский центр и аппаратуру потребителя, включающую навигационный приемник с антенной, видеокамеру контроля, аудиосистему и телемонитор, в систему входит бортовой компьютер (патент США №5504482).
Система также имеет достаточно сложную конфигурацию и не позволяет осуществлять мониторинг, оповещение и определение местоположения людей в закрытых помещениях.
Наиболее близким техническим решением к предлагаемому изобретению относится система обеспечения безопасности и мониторинга мобильных объектов (патент РФ №2265531, B60R 25/00, G08B 25/10, 2003). Система содержит, по меньшей мере, одну видеокамеру для получения видеосигнала от цели, по меньшей мере, одно устройство приема-передачи сигнала запроса, по меньшей мере, один компьютер, связанные посредством локальной вычислительной сети, транспондеры с собственными идентификационными сигналами, причем общее число транспондеров равно числу надлежащих владельцев, а каждый сигнал транспондера идентифицирует надлежащего владельца, причем устройство приема-передачи сигнала выполнено с возможностью приема указанного идентификационного кодового сигнала, по меньшей мере, один датчик обнаружения цели, в качестве которого используется устройство, выбранное из группы, включающей инфракрасные камеры, термовизорные камеры, радиолокационные устройства, датчики перемещения, по меньшей мере, одно устройство распознавания цели, соединенные через программно-аппаратный интерфейс с упомянутой видеокамерой, с датчиком обнаружения цели и с устройством приема-передачи, по меньшей мере, одну реализованную в компьютере базу данных с заранее записанными в нее идентификационными сигналами, отвечающими определенному надлежащему владельцу, и описаниями тревожных ситуаций, по меньшей мере, одну подвижную видеокамеру, выполненную с возможностью наведения на цель в зависимости от получаемого с устройства распознавания цели управляющего сигнала, и, по меньшей мере, один терминал наблюдения, приспособленный для информирования оператора и получения от него управляющих команд. База данных выполнена с возможностью доступа к ней с устройства распознавания целей, подвижной камеры и записи новой информации. Устройство распознавания и формирования команд управления выполняется с возможностью: анализа сигналов, поступающих с видеокамеры, от устройства приема-передачи сигналов и от датчиков обнаружения цели; определения цели, вычисления вектора скорости и текущей координаты нахождения цели, распознавания на их основе тревожной ситуации; опознавания цели в соответствии заданным алгоритмом хранящейся в базе данных информации; выдачи соответствующего управляющего сигнала на подвижную видеокамеру для наведения на цель и сигнала тревоги на терминал наблюдения. Подвижная камера выполнена с возможностью получения видеосигнала изображения цели, пригодного для анализа, и его передачи для хранения в базу данных. Устройство распознавания цели выполнено с возможностью анализа видеосигнала от видеокамеры, приспособленной для получения видеосигнала цели, в соответствии с описаниями тревожной ситуации, выбранными из группы, включающей яркость, размер, длительность нахождения в контролируемой зоне и направление перемещения, количество людей.
Недостатком применения известной системы обеспечения безопасности и мониторинга мобильных объектов в шахтных условиях является отсутствие обратной связи от терминала наблюдения к мобильным объектам, то есть возможности независимого мониторинга фона шахты, распознавания возникающих аварийных ситуаций, оповещения и контроля эвакуации горнорабочих. Аварии в шахтах характеризуются непредсказуемыми последствиями взрывов, обрушений, затоплений. Это потребует не только фиксации (по данным мониторинга) последнего местоположения горнорабочих, застигнутых аварией, но и их поиска в случае погребения под завалом. Кроме того, аварийная ситуация потребует оповещения горнорабочих, работающих в других участках, не затронутых аварией.
Технической задачей изобретения является создание такой системы, которая обеспечивала бы безопасный труд горнорабочих в шахтных и рудничных выработках, то есть мониторинг фоновой обстановки в шахте, своевременное предупреждение работающих о возникающих угрозах, контроль эвакуации, поиск терпящих бедствие.
Указанная техническая задача решена за счет того, что в известную систему обеспечения безопасности и мониторинга мобильных объектов, содержащую, по меньшей мере, одну видеокамеру, по меньшей мере, один компьютер, по меньшей мере, одно устройство приема-передачи сигнала, связанные посредством локальной вычислительной сети, а также транспондеры, выполненные с возможностью хранения и передачи собственных идентификационных кодовых сигналов, причем общее число транспондеров в системе соответствует количеству владельцев, подлежащих мониторингу, а каждый идентификационный сигнал транспондера отвечает определенному надлежащему владельцу, причем устройство приема-передачи сигнала выполнено с возможностью приема указанного идентификационного кодового сигнала, по меньшей мере, одно программно-реализованное в компьютере устройство распознавания и формирования команд управления, соединенное через аппаратно-программный интерфейс с упомянутой видеокамерой и устройством приема-передачи сигналов, по меньшей мере, одну реализованную в компьютере базу данных с заранее записанными в нее идентификационными сигналами, отвечающими определенным подлежащим мониторингу владельцам, описанием тревожных ситуаций, по меньшей мере, одну подвижную видеокамеру, выполненную с возможностью наведения в зависимости от получаемого от устройства распознавания и формирования команд управления управляющего сигнала, и, по меньшей мере, один терминал наблюдения, приспособленный для информирования оператора и получения от него управляющих команд, по меньшей мере, один датчик обнаружения, связанный с устройством распознавания и формирования команд управления, выполненным с возможностью обработки сигналов, поступающих от видеокамеры, от датчиков обнаружения и от устройства приема-передачи, а также возможностью вычисления вектора скорости и текущей координаты подлежащих мониторингу владельцев транспондеров, а также формирования и передачи на видеокамеру по последовательному каналу связи соответствующего управляющего сигнала, выдачи сигнала тревоги на терминал наблюдения, введены, по меньшей мере, одна подвижная инфракрасная камера для получения инфракрасного сигнала изображения, индивидуальные брелки, количество которых равно количеству надлежащих владельцев, излучающие индивидуальные маячковые кодовые сигналы в акустическом, инфракрасном и радиодиапазонах волн, по меньшей мере, одно устройство активирования индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального маячкового кодового акустического сигнала индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального маячкового кодового радиосигнала индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального маячкового кодового инфракрасного сигнала индивидуальных брелков, по меньшей мере, один датчик дыма, по меньшей мере, один датчик метана, по меньшей мере, один датчик температуры, по меньшей мере, один лазерный дальномер, причем датчики дыма, метана и температуры, а также устройство активирования индивидуальных брелков соединены через программно-аппаратный интерфейс по последовательному каналу связи с устройством распознавания и формирования команд управления, подвижная инфракрасная камера выполнена с возможностью наведения, в зависимости от управляющего сигнала, полученного по последовательному каналу связи от устройства распознавания и формирования команд управления, и параллельно подключена к подвижной видеокамере.
Предпочтительно, что в качестве цели видеокамеры, инфракрасной камеры, локационного устройства, термовизорной камеры, датчиков движения, датчиков дыма, температуры и метана выступают параметры фона шахтной выработки, то есть температура, концентрация метана и угольной пыли, движение угольных пластов. В случае несоответствия одного из параметров фона шахты требуемому данные устройства формирует сигнал тревоги, поступающий по электрической линии в устройство распознавания и формирования команд управления.
Предпочтительно, что подвижные видеокамера и инфракрасная камера выполнены с возможностью поворота в вертикальной и горизонтальной плоскостях, и/или изменения фокусного расстояния, и/или изменения диафрагмы, и/или настройки на фокус для обеспечения наведения на требуемый объект.
Предпочтительно, что предлагаемая система характеризуется тем, что алгоритм оповещения горнорабочих реализуется следующим образом. При появлении сигналов тревоги, с датчиков обнаружения, в устройстве распознавания и формирования команд управления определяются опасные (или потенциально опасные) зоны пребывания людей. Для этих зон в устройстве распознавания и формирования команд управления формируются сигналы оповещения, которые, через устройства активирования, включают индивидуальные брелки. При активировании индивидуальных маячковых кодовых акустических сигналов индивидуальных брелков их владельцы должны немедленно покинуть опасную зону. По идентификационным кодовым сигналам транспондеров в устройстве распознавания и формирования команд управления определяются надлежащие владельцы, которые находятся или могут находиться в опасной или потенциально опасной зоне, а также направление их эвакуации. Индивидуальные маячковые кодовые сигналы тревоги индивидуальных брелков принимаются устройствами распознавания индивидуальных маячковых кодовых инфракрасного, акустического и радиосигналов. Устройства распознавания индивидуальных маячковых кодовых сигналов формируют сигналы опознавания горнорабочих по индивидуальному излучению брелков. Сигналы опознавания по программно-аппаратному (проводному или беспроводному) интерфейсу поступают на устройство распознавания и формирования команд управления. По этим сигналам в устройстве распознавания и формирования команд управления осуществляется отождествление и определение местоположения горнорабочих и направления перемещения. На терминалы наблюдения с устройства распознавания и формирования команд управления поступает оперативная информация о состоянии среды в опасных (потенциально опасных) зонах, количестве и персональном составе горнорабочих, оказавшихся этих зонах, и направлении их эвакуации.
Предпочтительно, что в случае возникновения завала вследствие взрыва метана или угольной пыли определение местоположения и отождествление терпящих бедствие (погребенных под завалами) горнорабочих будет осуществляться методом пеленгования по уровню мощности индивидуального маячкового кодового излучения брелков в акустическом, оптическом и радиодиапазонах волн с помощью устройств распознавания.
Преимущественно, что устройства распознавания индивидуального маячкового кодового акустического, инфракрасного и радиосигналов индивидуальных брелков имеют слабонаправленную пространственную диаграмму приема.
Преимущественно, что излучение индивидуальных брелков осуществляется на частотах, отличных от излучений транспондеров, а радиочастоты и кодовые сигналы излучений в акустическом и инфракрасном диапазонах индивидуальных брелков отличаются друг от друга.
Преимущественно, что устройство распознавания и формирования команд управления выполнено с возможностью анализа данных, поступающих с датчиков метана, температуры и дыма, лазерного дальномера, датчиков перемещения, термовизорной камеры, локационных устройств и инфракрасной камеры.
Преимущественно, что устройство распознавания и формирования команд управления выполнено с возможностью определения потенциально опасных зон для пребывания горнорабочих и подачи сигнала тревоги на устройство активирования индивидуальных брелков.
Преимущественно, что устройство распознавания и формирования команд управления выполнено с возможностью приема сигналов, поступающих с устройств распознавания индивидуальных маячковых кодовых инфракрасного, акустического и радиосигналов, и определения владельцев, которые находятся в потенциально опасной зоне, а также направления их эвакуации.
Преимущественно, что в качестве датчика обнаружения использовано как минимум одно устройство, выбранное из группы - инфракрасная камера, термовизорная камера, локационное устройство, датчики перемещений.
Подробное описание изобретения
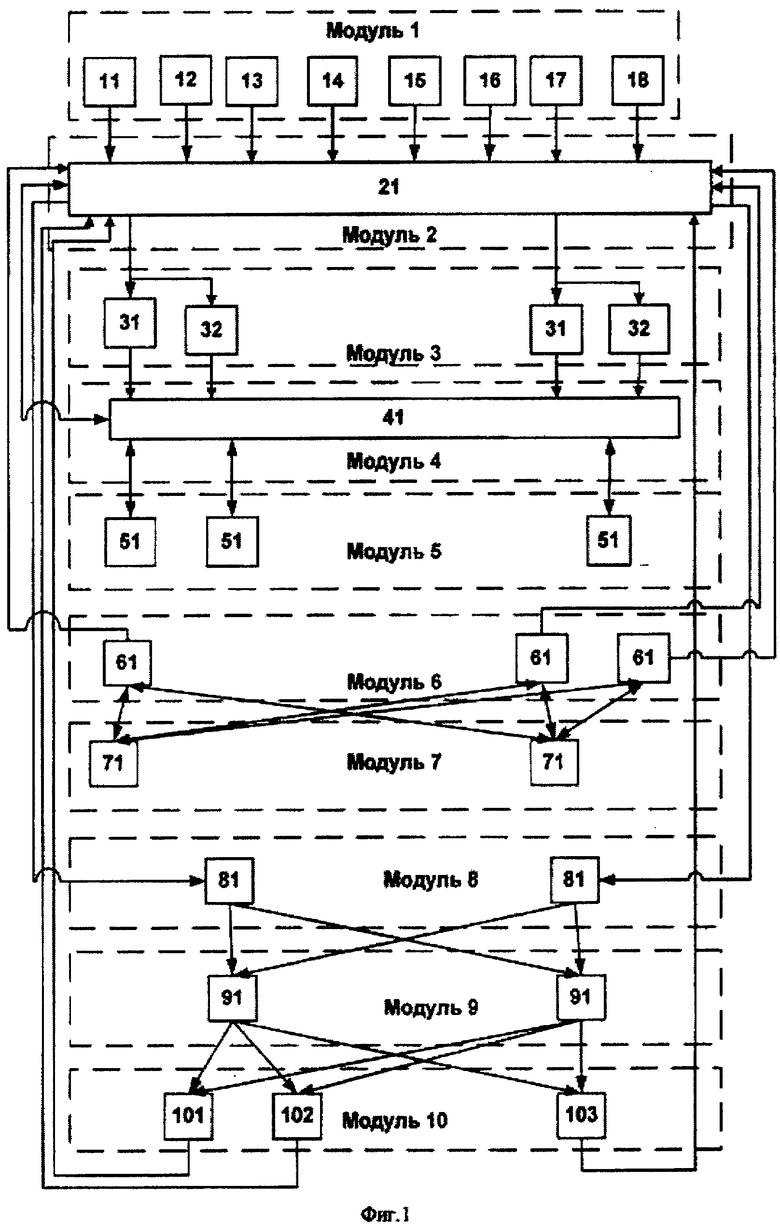
Функциональная схема шахтной системы мониторинга оповещения и определения местоположения горнорабочих представлена на фиг.1. Система состоит из взаимосвязанных устройств, соединенных проводной или радиосвязью и объединенных в отдельные модули. Данное разукрупнение по логическим модулям условно и не налагает ограничений на сущность изобретения.
Модуль 1 в зоне контроля шахтной выработки представляет собой набор датчиков обнаружения - устройств, реализованных на различных физических принципах, и осуществляет контроль параметров обитаемости среды. В качестве таких устройств могут использоваться видеокамера 11 (например, WAT-220), инфракрасная камера 12 (например, TVC200 VL), термовизорная камера 13 (например, ИРТИС-2000), лазерный дальномер 14 (например, DIMETIX DSL-AH-30); датчик движения 15 (например, Infinite), датчик метана 16 (например, ДМС-03), дымовой датчик 17 (например, TSD-90 А), датчик температуры 18 (например, АТТ-2508). Модуль 1 может включать различное количество и комбинацию перечисленных выше устройств зависимости от конкретного плана шахты и условий выработки, с возможностью взаимного перекрытия зон обнаружения датчиков. Основной функцией модуля 1 является мониторинг параметров среды в контролируемой зоне шахтной выработки и выдача сигналов тревоги в модуль 2, в случае выхода контролируемых параметров шахтной среды за установленные нормы безопасности. Устройства модуля 1 электрически связаны с модулем 2, который содержит устройство распознавания и формирования команд управления 21 (например, на базе персонального компьютера с процессором «Интел Пентиум»). Устройство 21 предназначено для распознавания и формирования команд управления устройствами оповещения горнорабочих и наблюдения за ситуацией в контролируемой зоне на основе анализа обстановки в шахте, измерения координат и параметров движения горнорабочих. Программное обеспечение устройства распознавания и формирования команд управления 21 позволяет получать и приводить в цифровую форму информацию от устройств мониторинга среды в зоне контроля шахтной выработки, обнаружения горнорабочих; анализа индивидуального маячкового кодового акустического, инфракрасного и радиоизлучений индивидуальных брелков; запоминать и отслеживать состояние среды в зоне контроля шахтной выработки (температуру, загазованность, плотность угольной пыли, концентрацию метана); вычислять вектор скорости, текущую координату нахождения горнорабочего; выдавать сигналы управления на подвижные видео- и инфракрасные камеры, а также устройства активирования индивидуальных брелков; выдавать сигналы тревоги на терминалы наблюдения, анализа результатов и управления системой; идентифицировать горнорабочих по сигналам акустического, инфракрасного и радиоизлучений брелков; сохранять в запоминающем устройстве в базе данных распознанные параметры. Модуль 2 через электрический интерфейс подключен к модулю 3 формирования сигналов видео- и инфракрасного изображения горнорабочих в контролируемой зоне шахтной выработки.
Модуль 3 включает параллельно включенные подвижные видео- 31 и инфракрасные 32 камеры, управляемые посредством команд управления, подаваемых с модуля 2 по последовательному каналу связи. Команды управления формируются за счет программного обеспечения модуля 2 и содержат информацию о векторе скорости и координатах горнорабочего. Модуль 3 может содержать различное число подвижных управляемых видео- и инфракрасных камер (например, WV-CS 854 и JADE US соответственно), приспособленных для выполнения следующих функций в соответствии с полученной от модуля 2 управляющей командой: поворот в вертикальной и горизонтальной плоскостях; изменение фокусного расстояния; настройка на фокус; изменение диафрагмы или скорости работы затвора. Подвижные видео- и инфракрасная камеры модуля 3 связаны через интерфейс с модулем 4, представляющим собой вычислительную машину с запоминающим устройством (например, персональный компьютер).
Модуль 4 состоит из запоминающего устройства 41. В данном запоминающем устройстве 41 создана база данных с возможностью запоминания: времени пребывания всех горнорабочих в контролируемой зоне; индивидуальных маячковых кодовых сигналов, излучаемых индивидуальными брелками в акустическом, радио- и инфракрасном диапазонах в случае тревоги; состояния (параметров) шахтной среды в зоне контроля. Модуль 4 электрически и логически связан через типовой программный интерфейс с модулем 2. Между модулями 2 и 4 осуществляется обмен данными. Модуль 4 также электрически связан с модулем 5 терминалов наблюдения, предназначенным для анализа результатов и управления системой, включающим один или несколько терминалов 51 наблюдения. Терминалы наблюдения 51 представляют собой один или несколько персональных компьютеров, объединенных сетями связи и предназначенных для обеспечения оператора возможностью наблюдения за происходящим в зоне контроля и управления системой мониторинга, оповещения и определения местоположения горнорабочих. Терминалы 51 выполнены с возможностью наблюдения ситуации на экране и доступа оператора к управлению системой через клавиатуру и микрофон. Модули 2, 4, 5 могут быть выполнены на базе распределительной сетевой системы, представляющей собой комбинацию специализированных вычислительных устройств и персональных компьютеров на базе персональных компьютеров (например, на базе процессора «Интел Пентиум»).
Модуль 6 состоит из одного или нескольких устройств приема-передачи 61, предназначенных для передачи одинаковых по структуре запросных сигналов, а также приема ответных идентификационных кодовых сигналов от транспондеров 71, объединенных в модуле 7. Транспондеры 71 представляют собой ответчики, которыми оснащаются надлежащие владельцы - все горнорабочие, спускающиеся в шахту. Устройства приема-передачи располагаются вдоль шахтной выработки и электрически связаны между собой и устройством 21. Зоны запроса и ответа транспондеров формируются таким образом, что один транспондер горнорабочего может одновременно отвечать только на запрос одного устройства приема-передачи. Каждый транспондер приспособлен для приема сигналов запроса и передачи собственного идентификационного кодового сигнала ответа на одно или несколько устройств приема-передачи 61. Собственный идентификационный кодовый сигнал заранее записан в транспондер. Расстояния между устройствами приема-передачи, их чувствительность, а также мощность излучения транспондеров таковы, что они обеспечивают, с одной стороны, достаточно высокую точность определения местоположения горнорабочих, а с другой стороны - непрерывный режим слежения за горнорабочими вдоль всей сети устройств приема-передачи.
Транспондеры, попадая в зону действия устройств приема-передачи, принимают сигнал запроса и излучают каждый свой идентификационный кодовый сигнал. Устройство приема-передачи 61 принимает идентификационные кодовые сигналы со всех транспондеров и передает их в устройство распознавания и формирования команд управления 21 модуля 2.
В устройстве распознавания и формирования команд управления 21 с использованием информации, хранящейся в базе данных, происходит сравнение всех получаемых идентификационных кодовых сигналов транспондеров с имеющимися в базе данных. В качестве устройств приема-передачи 61 сигналов может использоваться, например, EL-RFID-S фирмы «ЭЛВИС». В качестве транспондера может использоваться может использоваться устройство EL-RFID-T фирмы «ЭЛВИС».
Модуль активирования индивидуальных брелков 8 состоит из одного или нескольких устройств 81 активирования индивидуальных брелков. Активация может происходить двумя способами: автоматически, на основе сигналов тревоги одного или нескольких датчиков модуля 1, и по команде оператора, на основе информации, отображаемой на терминале 51. Команда на активацию брелков может поступить от оператора и в случае, если транспондер горнорабочих в течение длительного времени не будет отвечать на сигналы запроса устройств приема-передачи и на мониторе оператора не будет отображаться местоположение горнорабочих. При этом приоритет выдачи команды активирования отдается оператору. И в том и в другом случае команды активации поступают по электрической линии связи на устройства 81 с устройства распознавания и формирования команд управления. Команды активирования формируются в устройстве распознавания и формирования команд управления 21, на основе анализа информации, поступившей из модулей 1 и 5, и посылаются только на те брелки, надлежащие владельцы которых находятся или могут оказаться в опасной зоне. При этом устройство 21 формирует перечень возможных вариантов и времени эвакуации горнорабочих из опасной зоны (зон), а также список горнорабочих, оказавшихся в опасной зоне, поступающие на терминал наблюдения.
Устройства активирования 81 создают радиосигнал включения индивидуальных брелков 91, расположенных в модуле 9. Индивидуальными брелками оснащаются надлежащие владельцы - все горнорабочие, спускающиеся в шахту. Индивидуальный брелок после активирования начинает излучать индивидуальные маячковые кодовые акустические, инфракрасные и радиосигналы, каждый из которых отождествляется с соответствующим надлежащим владельцем. Устройства активирования имеют электрическую связь с устройством распознавания и формирования команд управления 21.
Индивидуальные маячковые кодовые акустические, инфракрасные и радиосигналы принимаются устройствами распознавания индивидуальных маячковых кодовых радио- 101, инфракрасного 102 и акустического 103 сигналов, расположенными в модуле 10. Устройства распознавания осуществляют отождествление надлежащих владельцев по параметрам индивидуальных маячковых кодовых сигналов и могут иметь как проводную, так и беспроводную связь с устройством распознавания и формирования команд управления 21. В устройстве распознавания и формирования команд управления происходит сравнение поступивших индивидуальных маячковых кодовых сигналов с имеющимися в базе данных. Индивидуальный брелок 91 целесообразно выполнять в одном корпусе и едином конструктивном исполнении с транспондером 71. Устройства распознавания размещаются в непосредственной близости от устройств приема-передачи и активирования индивидуальных брелков, поэтому зоны формирования запросных и активирующих сигналов, а также приема индивидуальных маячковых кодовых сигналов пространственно совпадают, а частоты запросного и активирующего радиосигналов различаются.
Предпочтительно, что все устройства модулей 1, 3, 6, 7, 8, 9, размещаемые в шахте, изготовлены с технологией, позволяющей удовлетворить требованиям, искробезопасности, взрывобезопасности, пожаробезопасности, ударо- и влагоустойчивости.
В общем случае предлагаемое изобретение охватывает различные варианты и комбинации программно-аппаратной реализации устройств распознавания и формирования команд управления, терминалов наблюдения 51, устройств приема-передачи 61, транспондеров 71, устройств распознавания сигналов индивидуальных брелков модуля 10, а также индивидуальных брелков 91.
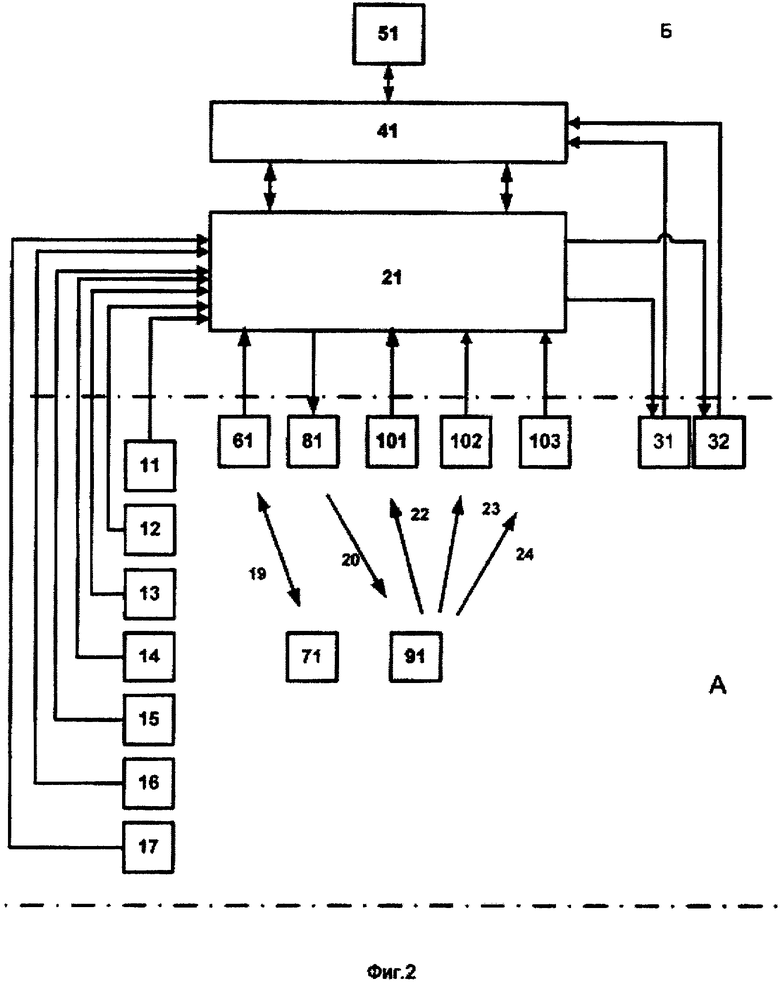
Принцип работы системы поясняется чертежом, приведенным на фиг.2, на котором приведен пример реализации шахтной системы. Данный пример не ограничивает всех возможных вариантов построения и существенных признаков шахтной системы мониторинга, оповещения и определения местоположения горнорабочих. Система, относящаяся к конкретному примеру, включает наземную (А) и подземную (Б) части. Наземная часть включает электрически связанные терминал наблюдения 51, запоминающее устройство 41, в котором размещена база данных, и устройство распознавания и формирования команд управления 21. Эти устройства могут быть выполнены на базе распределительной сетевой системы, представляющей собой комбинацию специализированных вычислительных устройств и персональных компьютеров на базе персональных компьютеров (например, на базе процессора «Интел Пентиум»). Подземная часть состоит из комплекса датчиков обнаружения для мониторинга среды в зоне контроля шахтной выработки, включающего видеокамеру 11, инфракрасную камеру 12, термовизорную камеру 13, лазерный дальномер 14, датчик движения 15, датчик метана 16, дымовой датчик 17, температурный датчик 18; параллельно включенных подвижных видео- 31 и инфракрасных 32 камер; устройства приема-передачи 61; устройства активирования индивидуального брелка 81, устройств распознавания индивидуальных маячковых кодовых радио- 101, инфракрасного 102 и акустического 103 сигналов излучения индивидуального брелка; расположенных на отождествляемом носителе (горнорабочем) индивидуального брелка 91 и транспондера 71. Причем каждый датчик мониторинга среды 11-17, устройство приема-передачи устройства приема-передачи 61, устройство активирования индивидуального брелка 81, устройства распознавания 101, 102, 103, а также подвижные видео- 31 и инфракрасная 32 камеры электрически по отдельным входам связаны с устройством распознавания и формирования команд управления 21. Кроме того, подвижные видео- 31 и инфракрасная камеры через интерфейс связаны с запоминающим устройством 41. Связь между транспондером 71 и устройством приема-передачи 61, также устройством активирования 81, индивидуальным брелком 91 и устройствами распознавания 101, 102, 103 устанавливается посредством радиосигналов. Причем частоты излучения радиосигналов транспондера и индивидуального брелка отличаются друг от друга.
Работа системы осуществляется в штатном и аварийном режимах. Штатный режим является режимом повседневного безаварийного производственного функционирования шахты. Аварийный режим - это режим проведения противоаварийных мероприятий, эвакуации горнорабочих вследствие возникновения угрозы их жизни и здоровью.
В штатном режиме система осуществляет автоматизированный мониторинг: местоположения горнорабочего, оснащенного транспондером 71 и индивидуальным брелком 91, посредством радиолинии 19, а также с помощью подвижных видео- 31 и инфракрасной 32 камер; состояния среды в зоне выработки посредством датчиков обнаружения 11-17. Информация мониторинга отображается на экране терминала 51 оператора.
В аварийном режиме система
регистрирует сигналы тревоги, поступающие с датчиков обнаружения 11-17 на устройство распознавания и формирования команд управления 21;
передает сигнал активирования индивидуального брелка 91 с устройства активирования 81 посредством радиолинии 20;
осуществляет распознавание индивидуального брелка 91 с помощью устройств распознавания 101, 102, 103 по индивидуальным маячковым кодовым радио- 22, инфракрасным 23 и акустическим 24 сигналам соответственно и по этим же сигналам регистрирует факт получения горнорабочим сигнала тревоги;
контролирует эвакуацию горнорабочего из зоны аварии посредством сигналов запроса-ответа, распространяющихся по радиолинии 19, а также с помощью подвижных видео- 31 и инфракрасной 32 камер;
осуществляет поиск своевременно не вышедших (вследствие гибели, ранения или заблудившихся), терпящих бедствие (под завалами) горнорабочих посредством сигналов 22, 23, 24, излучаемых индивидуальным брелком 91.
В штатном режиме параметры среды шахтной выработки стабильны и не выходят за недопустимый порог. Поэтому сигнала тревоги с датчиков обнаружения 11-17 на устройство распознавания и формирования команд управления 21 не поступает. Осуществляется обмен по радиолинии запроса-ответа 19 между устройством приема-передачи 61, посылающим сигнал общего запроса, и транспондером, отвечающим кодовым идентификационным сигналом. В устройстве распознавания и формирования команд управления 21, по данным сигналов ответа, осуществляется определение текущих координат и времени получения ответного идентификационного кодового сигнала, вектора движения и отождествление сигналов ответа транспондера с его надлежащим носителем. Информация с устройства распознавания и формирования команд управления 21 поступает в базу данных запоминающего устройства 41, в котором накапливаются данные о местоположении и направлении перемещения отождествленного надлежащего владельца (горнорабочего) транспондера 71. Накопленная в базе данных информация отображается на экране терминала 51 и обновляется с периодом, достаточным для мониторинга присутствия горнорабочего в зоне контроля с учетом его мобильности. Идентифицированный горнорабочий в виде соответствующего ему мнемознака, в соответствии с координатной информацией и временем ее получения, отображается на плане выработки шахты, введенном в запоминающее устройство 41. Оператор системы может, при необходимости, получить информацию о трассе движения горнорабочего.
Координаты горнорабочего передаются на подвижные видеокамеру 31 и инфракрасную камеру 32 в виде совокупности целеуказаний с учетом экстраполяции движения горнорабочего. По сигналам целеуказаний подвижная видеокамера 31 и инфракрасная камера 32 наводятся на горнорабочего. Видео- и инфракрасное изображение горнорабочего может проецироваться на экран терминала 51.
В случае отклонения параметров среды шахты от нормальных значений, обеспечивающих жизнедеятельность, срабатывают и выдают сигнал тревоги датчики обнаружения 11-17. В качестве причин отклонения параметров среды могут быть увеличение концентрации метана, углекислого газа, угольной пыли, появление дыма, возгорание, смещение пластов породы, остановка главных вентиляторов и т.п. Так как каждый датчик имеет фиксированное расположение с привязкой координат к плану шахты, то устройство распознавания и формирования команд управления 21 выдаст координаты тревожного датчика с указанием вида тревоги (например, «ПОЖАР», «МЕТАН», «ВЗРЫВ»). Вычислительное устройство определяет размеры зон возможного поражения и направление и скорость перемещения угрожающих жизни и здоровью людей образований (дыма, газа, продуктов горения) и посредством радиолинии 20 выдает сигнал включения устройства 81 активирования индивидуального брелка 91 в участки возможного поражения горнорабочих. При включении излучения индивидуального брелка горнорабочий обязан срочно эвакуироваться в направлении выхода. Индивидуальный брелок излучает индивидуальные маячковые кодовые радио- 22, инфракрасные 23 и акустические 24 сигналы, которые принимаются соответственно устройствами распознавания индивидуальных маячковых кодовых радио- 101, инфракрасного 102 и акустического 103 сигналов. С выходов устройств распознавания сигналы поступают в специальное вычислительное устройство распознавания и формирования команд управления 21. Из базы данных запоминающего устройства 41 в устройство распознавания и формирования команд управления 21 поступает выборка параметров индивидуальных маячковых кодовых сигналов. В устройстве распознавания и формирования команд управления 21 происходит сравнение и отождествление параметров вновь поступивших индивидуальных маячковых кодовых сигналов с имеющимися в базе запоминающего устройства 41, а также расчет координат и направления движения горнорабочего в ходе эвакуации.
Время, направление перемещения и координаты горнорабочего при эвакуации с устройства распознавания и формирования команд управления 21 передаются в базу данных запоминающего устройства 41. Поступление сигналов с устройств распознавания 101, 102, 103 в устройство распознавания и формирования команд управления 21 само по себе является сигналом обратной связи получения тревоги на индивидуальный брелок. При этом оператор на экране терминала 51 фиксирует время, координату и направление перемещения горнорабочего. По сигналам индивидуального брелка система мониторинга, оповещения и определения местоположения горнорабочих осуществляет поиск и определение местоположения горнорабочих в случаях возникновения завала и обрыва системы запроса-ответа.
Оператор системы может дать указание системе следить за выбранным горнорабочим или группой горнорабочих, указанных произвольно по изображению. При этом система будет автоматически поочередно выводить на экран изображения горнорабочих, передаваемые подвижными камерами 31 и 32 в детальном виде.
Система предназначена для применения в горнодобывающей промышленности, использующей как закрытые, так и открытые рудничные способы выработки, для мониторинга и обеспечения безопасности горнорабочих. Система может быть реализована как на базе специализированных, так и на базе типовых устройств.
Шахтная система мониторинга, оповещения и определения местоположения горнорабочих согласно настоящему изобретению позволяет реализовать безопасные условия труда горнорабочих с высокой степенью надежности, распознавать запрограммированные опасные ситуации и отождествлять горнорабочих, выдавать сигналы тревоги, принимать сигналы бедствия и осуществлять поиск потерпевших.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2422641C1 |
| СИСТЕМА КОНТРОЛЯ ПРОХОДА И ПЕРЕМЕЩЕНИЯ В ТОННЕЛЕ | 2015 |
|
RU2606554C2 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ РАДИОЧАСТОТНЫХ МЕТОК В ЗДАНИИ ДЛЯ УПРАВЛЕНИЯ ЭВАКУАЦИЕЙ В ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЯХ | 2021 |
|
RU2780552C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ РАДИОЧАСТОТНЫХ МЕТОК В ЗДАНИИ С ПОВЫШЕННОЙ ИЗБИРАТЕЛЬНОСТЬЮ ДЛЯ УПРАВЛЕНИЯ ЭВАКУАЦИЕЙ В ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЯХ | 2021 |
|
RU2780776C1 |
| СИСТЕМА КОНТРОЛЯ ЖИЗНЕННО ВАЖНЫХ ПОКАЗАТЕЛЕЙ ЗДОРОВЬЯ ПАЦИЕНТА | 2010 |
|
RU2454924C2 |
| ШАХТНАЯ ТЕЛЕКОММУНИКАЦИОННАЯ СИСТЕМА | 2018 |
|
RU2679777C1 |
| СИСТЕМА ШАХТНОЙ СВЯЗИ | 2012 |
|
RU2508449C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| СИСТЕМА МОНИТОРИНГА, ИНФОРМАЦИОННОГО ОБСЛУЖИВАНИЯ И ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ ОТ НЕСАНКЦИОНИРОВАННОГО ВОЗДЕЙСТВИЯ | 2001 |
|
RU2174923C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
Изобретение относится к горному делу, в частности к системам мониторинга, оповещения и определения местоположения горнорабочих. Техническим результатом является мониторинг фоновой обстановки в шахте, своевременное предупреждение работающих о возникающих угрозах, контроль эвакуации, поиск терпящих бедствие. Система содержит установленные в шахтной выработке датчики мониторинга фона шахтной среды (температуры, загазованности, метана, пыли, перемещения пластов и т.д.), регистрации местоположения и направления перемещения горнорабочих, подвижные видео- и инфракрасные камеры, устройство распознавания и формирования команд управления, терминалы операторов, осуществляющих мониторинг фона шахтной выработки и местоположения горнорабочих и управление работой системы. Горнорабочие оснащаются транспондерами и индивидуальными брелками. Транспондеры предназначены для обмена кодовыми радиосигналами в режиме запроса-ответа с устройствами приема-передачи, которые расположены вдоль выработки шахты, что позволяет осуществлять мониторинг положения и перемещения горнорабочих. Индивидуальные брелки излучают индивидуальные маячковые кодовые сигналы в акустическом, инфракрасном и радиодиапазонах волн, причем коды излучения отождествляются с личностью горнорабочего. Устройство распознавания и формирования команд управления, а также база данных к ней реализованы в ЭВМ. База данных включает сведения о плане выработки шахты, расположении датчиков, координатах устройств запроса-ответа, индивидуальных кодах транспондеров и отождествляемых с ними владельцах, пороговых параметрах аварийных ситуаций, модуляционных параметрах индивидуальных маячковых кодовых сигналов брелков. Помимо этого, в выработке шахты размещаются подвижные видео- и инфракрасные камеры, с помощью которых можно контролировать ситуацию в шахте, а также устройства активирования индивидуальных брелков и распознавания индивидуальных маячковых кодовых сигналов излучения брелков в акустическом, радио- и инфракрасном диапазонах волн. Все датчики, устройства приема-передачи, устройства распознавания, активирования индивидуальных брелков, подвижные видео- и инфракрасные камеры подключены к устройству распознавания и формирования команд управления. 9 з.п. ф-лы, 2 ил.
1. Шахтная система мониторинга, оповещения и определения местоположения горнорабочих, содержащая, по меньшей мере, одну видеокамеру, по меньшей мере, один компьютер, по меньшей мере, одно устройство приема-передачи сигнала, связанные посредством локальной вычислительной сети, а также транспондеры, выполненные с возможностью хранения и передачи собственных идентификационных кодовых сигналов, соответствующих количеству владельцев, подлежащих мониторингу, а каждый идентификационный сигнал транспондера отвечает определенному надлежащему владельцу, причем устройство приема-передачи сигнала выполнено с возможностью приема указанного идентификационного кодового сигнала, по меньшей мере, одно программно-реализованное в компьютере устройство распознавания и формирования команд управления, соединенное через аппаратно-программный интерфейс с упомянутой видеокамерой и устройством приема-передачи сигналов, по меньшей мере, одну реализованную в компьютере базу данных с заранее записанными в нее идентификационными сигналами, отвечающими определенным подлежащим мониторингу владельцам, описанием тревожных ситуаций, по меньшей мере, одну подвижную видеокамеру, выполненную с возможностью наведения в зависимости от получаемого от устройства распознавания и формирования команд управления управляющего сигнала, и, по меньшей мере, один терминал наблюдения, приспособленный для информирования оператора и получения от него управляющих команд, по меньшей мере, один датчик обнаружения, связанный с устройством распознавания и формирования команд управления, выполненным с возможностью обработки сигналов, поступающих от видеокамеры, от датчиков обнаружения и от устройства приема-передачи, а также возможностью вычисления вектора скорости и текущей координаты подлежащих мониторингу владельцев транспондеров, а также формирования и передачи на видеокамеру по последовательному каналу связи соответствующего управляющего сигнала, выдачи сигнала тревоги на терминал наблюдения, отличающаяся тем, что содержит, по меньшей мере, одну подвижную инфракрасную камеру для получения инфракрасного сигнала изображения, индивидуальные брелки, количество которых равно количеству надлежащих владельцев, и излучающие индивидуальные маячковые кодовые акустический, инфракрасный и радиосигналы, по меньшей мере, одно устройство активирования индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального маячкового кодового акустического сигнала индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального маячкового кодового радиосигнала индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального кодового маячкового инфракрасного сигнала индивидуальных брелков, по меньшей мере, один датчик дыма, по меньшей мере, один датчик метана, по меньшей мере, один датчик температуры, по меньшей мере один лазерный дальномер, при этом устройства распознавания индивидуальных маячковых кодовых инфракрасного акустического и радиосигналов индивидуальных брелков обладают функцией отождествления сигналов с их надлежащими владельцами, датчики дыма, метана и температуры, лазерный дальномер, датчики, а также устройство активирования индивидуальных брелков соединены через программно-аппаратный интерфейс по последовательному каналу связи с устройством распознавания и формирования команд управления, подвижная инфракрасная камера выполнена с возможностью наведения, в зависимости от управляющего сигнала полученного по последовательному каналу связи от устройства распознавания и формирования команд управления, и параллельно подключена к подвижной видеокамере.
2. Система по п.1, отличающаяся тем, что видеокамера, инфракрасная камера, локационное устройство, лазерный дальномер, термовизорная камера, датчики движения, дыма, метана, температуры контролируют параметры фона шахтной выработки, например температуру, концентрацию метана и угольной пыли, движение угольных пластов.
3. Система по п.1, отличающаяся тем, что подвижные видеокамера и инфракрасная камера выполнены с возможностью поворота в вертикальной и горизонтальной плоскостях и/или изменения фокусных настроек.
4. Система по п.1, отличающаяся тем, что определение местоположения и отождествление владельцев индивидуальных брелков осуществляется методом пеленгования по уровню мощности индивидуального излучения брелков в акустическом, оптическом и радиодиапазонах волн с помощью устройств распознавания индивидуальных маячковых кодовых радио, инфракрасного, акустического сигналов индивидуальных брелков.
5. Система по п.1, отличающаяся тем, что компьютерная база данных дополнительно содержит информацию о пороговых значениях параметров фона шахты, соответствующих наступлению аварийной ситуации, данные отождествления индивидуальных маячковых кодовых акустического, инфракрасного и радиосигналов индивидуальных брелков с их владельцами, план выработки шахты с привязкой к ней точек расположения датчиков фона, устройств приема-передачи, устройств распознавания, подвижных видео и инфракрасной камер, участков активной выработки, направлений эвакуации, с отображением плана выработки шахты на мониторе оператора.
6. Система по п.1, отличающаяся тем, что излучение индивидуальных брелков осуществляется на частотах отличных от излучений транспондеров, а радиочастоты и кодовые сигналы излучений в акустическом и инфракрасном диапазонах индивидуальных брелков отличаются друг от друга.
7. Система по п.1, отличающаяся тем, что устройство распознавания и формирования команд управления выполнено с возможностью анализа данных, поступающих с датчиков метана, температуры и дыма, лазерного дальномера, датчиков перемещения, термовизорной камеры, локационных устройств и инфракрасной камеры.
8. Система по п.1, отличающаяся тем, что устройство распознавания и формирования команд управления выполнено с возможностью определения потенциально опасных зон для пребывания горнорабочих и подачи сигнала тревоги на устройство активирования индивидуальных брелков.
9. Система по п.1, отличающаяся тем, что устройство распознавания и формирования команд управления выполнено с возможностью приема сигналов, поступающих с устройств распознавания индивидуальных маячковых кодовых инфракрасного акустического и радиосигналов и определения владельцев, которые находятся в потенциально опасной зоне, а также направления их эвакуации.
10. Система по п.1, отличающаяся тем, что в качестве датчика обнаружения использовано как минимум одно устройство, выбранное из группы - инфракрасная камера, термовизорная камера, локационное устройство, датчики перемещений.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ И КОНТРОЛЯ ПРОИЗВОДСТВЕННЫХ ПРОЦЕССОВ, ОКРУЖАЮЩЕЙ СРЕДЫ И МЕСТОПОЛОЖЕНИЯ ГОРНОРАБОЧИХ В ПОДЗЕМНЫХ ВЫРАБОТКАХ | 2000 |
|
RU2180941C2 |
| Система беспроводной сигнализации и связи | 1976 |
|
SU608975A1 |
| УСТРОЙСТВО БЕСПРОВОДНОЙ АВАРИЙНО-ВЫЗЫВНОЙ И ИНФОРМАЦИОННО-ТЕХНОЛОГИЧЕСКОЙ ШАХТНОЙ СИГНАЛИЗАЦИИ И СВЯЗИ | 1993 |
|
RU2112146C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| УСТРОЙСТВО БЕСПРОВОДНОЙ АВАРИЙНО-ТЕХНОЛОГИЧЕСКОЙ СИГНАЛИЗАЦИИ И СВЯЗИ | 1997 |
|
RU2131515C1 |
| ВОДКА ОСОБАЯ "ЕРМАК" | 1993 |
|
RU2091462C1 |
| US 5090775 A, 25.02.1992. | |||

