Изобретение относится к оборудованию, предназначенному для наблюдения за перемещением подвижных объектов и предоставления информации об их местонахождении соответствующим службам.
Система может использоваться для контроля за работой пассажирского и грузового транспорта, персонала и подвижного технологического оборудования, включая места, где невозможно или нецелесообразно использование проводных или беспроводных каналов связи.
Такие условия, в частности, могут иметь место при контроле передвижений внутришахтного транспорта и людей при серьезных ограничениях в распространении радиоволн (подземные выработки) или в местах проведения взрывных работ, где высок риск повреждения проводных линий связи.
Известен:
Способ регистрации и контроля рейсов подвижных объектов (варианты) (патент на изобретение №2225642, с приоритетом от 30.09.2002 г.):
1. Система регистрации и контроля рейсов подвижных объектов, содержащая узел информации, соединенный с автоматическим регистрирующим устройством, включающим блок индикации и блок контроля записи, и через интерфейсное устройство с ЭВМ, отличающаяся тем, что узел информации выполнен в виде блока хранения и переноса информации, а система снабжена внешними контрольно-измерительными устройствами, автоматическое регистрирующее устройство включает дополнительно блок сопряжения, вход которого соединен с внешними контрольно-измерительными устройствами, блок принятия решений, входы которого соединены с выходами блока сопряжения и блока контроля записи, а выход - с блоком индикации, анализатор, вход которого соединен с блоком хранения и переноса информации, а выход - с входом блока принятия решений, блок шифрации-дешифрации соединен с анализатором, а вход блока шифрации-дешифрации - с вторым выходом блока контроля записи, блок памяти, соединенный с блоком принятия решений, вход блока памяти соединен с выходом блока шифрации-дешифрации, а выход - с входом блока контроля записи.
2. Система для регистрации и контроля рейсов подвижных объектов, содержащая узел информации, соединенный с автоматическим регистрирующим устройством, включающим блок индикации и блок контроля записи, и через интерфейсное устройство с ЭВМ, отличающаяся тем, что узел информации выполнен в виде блока хранения и переноса информации, а система снабжена внешними контрольно-измерительными устройствами, автоматическое регистрирующее устройство включает дополнительно блок сопряжения, вход которого соединен с внешними контрольно-измерительными устройствами, узел управления, соединенный со вторым входом блока сопряжения, блок принятия решений, входы которого соединены с выходами блока сопряжения и блока контроля записи, а выход - с блоком индикации, анализатор, вход которого соединен с блоком хранения и переноса информации, а выход - с входом блока принятия решений, блок шифрации-дешифрации соединен с анализатором, а вход блока шифрации-дешифрации - с вторым выходом блока контроля записи, блок памяти, соединенный с блоком принятия решений, вход блока памяти соединен с выходом блока шифрации-дешифрации, а выход - с входом блока контроля записи.
Известна:
Шахтная система мониторинга, оповещения и определения местоположения горнорабочих (патент РФ на полезную модель №82270, с приоритетом от 2009.01.21), содержащая, по меньшей мере, одну видеокамеру, по меньшей мере, один компьютер, по меньшей мере, одно устройство приема-передачи сигнала, связанные посредством локальной вычислительной сети, а также транспондеры, выполненные с возможностью хранения и передачи собственных идентификационных кодовых сигналов, соответствующих количеству владельцев, подлежащих мониторингу, а каждый идентификационный сигнал транспондера отвечает определенному надлежащему владельцу, причем устройство приема-передачи сигнала выполнено с возможностью приема указанного идентификационного кодового сигнала, по меньшей мере, одно программно-реализованное в компьютере устройство распознавания и формирования команд управления, соединенное через аппаратно-программный интерфейс с упомянутой видеокамерой и устройством приема-передачи сигналов, по меньшей мере, одну реализованную в компьютере базу данных с заранее записанными в нее идентификационными сигналами, отвечающими определенным подлежащим мониторингу владельцам, описанием тревожных ситуаций, по меньшей мере, одну подвижную видеокамеру, выполненную с возможностью наведения в зависимости от получаемого от устройства распознавания и формирования команд управления управляющего сигнала, и, по меньшей мере, один терминал наблюдения, приспособленный для информирования оператора и получения от него управляющих команд, по меньшей мере, один датчик обнаружения, связанный с устройством распознавания и формирования команд управления, выполненным с возможностью обработки сигналов, поступающих от видеокамеры, от датчиков обнаружения и от устройства приема-передачи, а также возможностью вычисления вектора скорости и текущей координаты подлежащих мониторингу владельцев транспондеров, а также формирования и передачи на видеокамеру по последовательному каналу связи соответствующего управляющего сигнала, выдачи сигнала тревоги на терминал наблюдения, отличающаяся тем, что содержит, по меньшей мере, одну подвижную инфракрасную камеру для получения инфракрасного сигнала изображения, индивидуальные брелки, количество которых равно количеству надлежащих владельцев, и излучающие индивидуальные маячковые кодовые акустический, инфракрасный и радиосигналы, по меньшей мере, одно устройство активирования индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального маячкового кодового акустического сигнала индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального маячкового кодового радиосигнала индивидуальных брелков, по меньшей мере, одно устройство распознавания индивидуального кодового маячкового инфракрасного сигнала индивидуальных брелков, по меньшей мере, один датчик дыма, по меньшей мере, один датчик метана, по меньшей мере, один датчик температуры, по меньшей мере один лазерный дальномер, при этом устройства распознавания индивидуальных маячковых кодовых инфракрасного акустического и радиосигналов индивидуальных брелков обладают функцией отождествления сигналов с их надлежащими владельцами, датчики дыма, метана и температуры, лазерный дальномер, датчики, а также устройство активирования индивидуальных брелков соединены через программно-аппаратный интерфейс по последовательному каналу связи с устройством распознавания и формирования команд управления, подвижная инфракрасная камера выполнена с возможностью наведения, в зависимости от управляющего сигнала, полученного по последовательному каналу связи от устройства распознавания и формирования команд управления, и параллельно подключена к подвижной видеокамере.
2. Система по п.1, отличающаяся тем, что видеокамера, инфракрасная камера, локационное устройство, лазерный дальномер, термовизорная камера, датчики движения, дыма, метана, температуры контролируют параметры фона шахтной выработки, например температуру, концентрацию метана и угольной пыли, движение угольных пластов.
3. Система по п.1, отличающаяся тем, что подвижные видеокамера и инфракрасная камера выполнены с возможностью поворота в вертикальной и горизонтальной плоскостях и/или изменения фокусных настроек.
4. Система по п.1, отличающаяся тем, что определение местоположения и отождествление владельцев индивидуальных брелков осуществляется методом пеленгования по уровню мощности индивидуального излучения брелков в акустическом, оптическом и радиодиапазонах волн с помощью устройств распознавания индивидуальных маячковых кодовых радио-, инфракрасного, акустического сигналов индивидуальных брелков.
5. Система по п.1, отличающаяся тем, что компьютерная база данных дополнительно содержит информацию о пороговых значениях параметров фона шахты, соответствующих наступлению аварийной ситуации, данные отождествления индивидуальных маячковых кодовых акустического, инфракрасного и радиосигналов индивидуальных брелков с их владельцами, план выработки шахты с привязкой к ней точек расположения датчиков фона, устройств приема-передачи, устройств распознавания, подвижных видео- и инфракрасной камер, участков активной выработки, направлений эвакуации, с отображением плана выработки шахты на мониторе оператора.
6. Система по п.1, отличающаяся тем, что излучение индивидуальных брелков осуществляется на частотах, отличных от излучений транспондеров, а радиочастоты и кодовые сигналы излучений в акустическом и инфракрасном диапазонах индивидуальных брелков отличаются друг от друга.
7. Система по п.1, отличающаяся тем, что устройство распознавания и формирования команд управления выполнено с возможностью анализа данных, поступающих с датчиков метана, температуры и дыма, лазерного дальномера, датчиков перемещения, термовизорной камеры, локационных устройств и инфракрасной камеры.
8. Система по п.1, отличающаяся тем, что устройство распознавания и формирования команд управления выполнено с возможностью определения потенциально опасных зон для пребывания горнорабочих и подачи сигнала тревоги на устройство активирования индивидуальных брелков.
9. Система по п.1, отличающаяся тем, что устройство распознавания и формирования команд управления выполнено с возможностью приема сигналов, поступающих с устройств распознавания индивидуальных маячковых кодовых инфракрасного, акустического и радиосигналов, и определения владельцев, которые находятся в потенциально опасной зоне, а также направления их эвакуации.
10. Система по п.1, отличающаяся тем, что в качестве датчика обнаружения использовано как минимум одно устройство, выбранное из группы: инфракрасная камера, термовизорная камера, локационное устройство, датчики перемещений.
Известна также:
Система BECKERTAG фирмы «Becker NCS Pty Ltd», Germany, www.becker-mining.com, позволяющая отслеживать персонал, транспортные средства и работающее оборудование в горнодобывающей промышленности, состоящая из транспондеров, выполненных с возможностью хранения и передачи собственных идентификационных кодовых сигналов, соответствующих количеству владельцев, подлежащих мониторингу, а каждый идентификационный сигнал транспондера соответствует определенному владельцу, считывателей сигналов транспондеров, распределенных по зоне охвата системы и соединенных каким-либо каналом связи (оптоволоконным, радиочастотным или проводным) с устройством обработки и визуализации данных, а также совместимая с ней система предупреждения столкновений.
Известна также:
Система автоматизированного контроля и управления движением общественного транспорта (заявка №93038532/09, от 27.07.1993 г., дата публикации 27.02.1996 г., заявители Мякотин Г.С., Шайдуров Г.Я., авторы Мякотин Г.С., Шайдуров Г.Я.).
Система относится к устройствам контроля графика движения общественного транспорта и может быть использована для управления ритмичностью движения. В основу изобретения положена задача удешевления аппаратурного комплекса. Предлагаемая система состоит из центрального диспетчерского пульта (ПДП), соединенного через две базовые радиостанции с периферийными узловыми радиотерминалами (УРТ), размещаемыми на пунктах, объединяющих начала группы маршрутов. Вдоль маршрутов в 2-х и 3-х точках размещены маршрутные радиомаяки (МРМ) с радиусом действия 100-200 м, излучающие кодированные посылки с собственным адресом. На контролируемых транспортных средствах (ТС) размещены приборы ТС, включающие бортовую радиостанцию (БС) малого радиуса действия (100-200 м), работающую на одной из двух частот f1 или f2, и устройство запоминания временных меток прохождения МРМ. При возвращении с маршрута на узловой пункт водитель нажатием кнопки сбрасывает через БС запомненные данные о времени прохождения МРМ на УРТ. УРТ содержит две узловые радиостанции (УРС), одна из которых служит для передачи данных и команд на частоте f1, а другая - для радиотелефонных переговоров на частоте f2. Принятые с БС данные о режиме движения ТС пакетируются в устройстве формирования пакетов и передаются через УРС на ЦДП. По второму варианту связь ПДП и УРТ осуществляется по телефонной кабельной линии непосредственно либо при передаче данных через модем. В этом случае используют УРС малого радиуса действия (100-200 м) для ретрансляции переговоров и данных с ТС, ведущихся через ВС ТС.
В Способе регистрации и контроля рейсов подвижных объектов (варианты) передача информации от автоматического регистрирующего устройства к ЭВМ осуществляется с помощью блока хранения и переноса информации (электронной таблетки, являющейся «переносной, малогабаритной, высоконадежной…») посредством поочередного ручного подключения к ним через «контактный узел». Такой способ приемлем только при небольшом количестве подвижных объектов и интенсивности их движения.
Система BECKERTAG фирмы «Becker NCS Pty Ltd», Germany так же, как и Шахтная система мониторинга, оповещения и определения местоположения горнорабочих, несмотря на чрезвычайную сложность последней не обеспечивает определения положения движущихся объектов вне зоны действия считывателей сигналов транспондеров и устройств приема-передачи сигнала, связанных с компьютером обработки данных каким-либо каналом связи.
Система автоматизированного контроля и управления движением общественного транспорта является ближайшим аналогом предлагаемого изобретения. Недостатком ее является то, что «при возвращении с маршрута на узловой пункт … запомненные данные о времени прохождения МРМ… водитель нажатием кнопки сбрасывает через БС … на УРТ»; то есть автоматизация системы является неполной, так как используется ручной режим работы с присущими ему недостатками: дополнительная нагрузка на водителя транспортного средства, вероятность невыполнения этой операции и т.п. Предлагаемое изобретение лишено этого недостатка.
Технические задачи, решаемые предлагаем изобретением:
расширение возможностей по мониторингу подвижных объектов в условиях неполного охвата зоны действия системы проводными или радиоканалами передачи данных, например при серьезных ограничениях в распространении радиоволн (подземные выработки) или в местах проведения взрывных работ, где высок риск повреждения проводных линий связи, осуществляемое посредством размещения в подобных местах радиомаяков точек отметки - передатчиков, периодически излучающих в эфир информацию, содержащую уникальный номер точки отметки. При появлении в контролируемых радиомаяками точек отметки зонах подвижного объекта, оснащенного устройством регистрации, последнее принимает этот сигнал и фиксирует его уникальный номер (в базе данных соответствует определенному месторасположению) и время регистрации. Полученные данные автоматически, по периодическим запросам стационарного считывателя, передаются ему мобильным устройством регистрации и далее на устройство обработки и визуализации данных.
Поставленная задача решается следующим образом.
Система мониторинга подвижных объектов состоит по крайней мере из одного стационарного считывателя, расположенного, например, в начальной точке маршрута, мобильных устройств регистрации, размещенных на подвижных объектах, и радиомаяков точек отметки, расположенных в характерных точках маршрута; при этом стационарные считыватели и мобильные устройства регистрации оснащены приемопередатчиками радиосигналов ограниченного радиуса действия, а радиомаяки точек отметки - передатчиками ограниченного радиуса действия, периодически излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий место установки радиомаяка точки отметки; при появлении в контролируемых радиомаяками точек отметки зонах подвижного объекта, оснащенного мобильным устройством регистрации, последнее по мере движения принимает сигналы от соответствующих радиомаяков точек отметки, фиксируя их уникальные номера и время регистрации; полученные данные передаются мобильным устройством регистрации после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком стационарного считывателя, в зоне действия которого оказывается объект при дальнейшем движении.
Радиомаяки точек отметки системы мониторинга подвижных объектов могут быть оснащены приемопередатчиками радиосигналов ограниченного радиуса действия, излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий место установки радиомаяка точки отметки, после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком мобильного устройства регистрации.
Стационарные считыватели системы мониторинга подвижных объектов могут быть соединены информационной магистралью между собой и устройством обработки и визуализации данных.
Маломощные передатчики (приемопередатчики) радиомаяков точек отметки системы мониторинга подвижных объектов могут получать питание от автономных источников (батарей) и, наряду с уникальным номером, излучают информацию о степени разряженности питающей его батареи.
Система мониторинга подвижных объектов может содержать размещенные на подвижных объектах метки системы позиционирования, оснащенные приемопередатчиками ограниченного радиуса действия; после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком стационарного считывателя или мобильного устройства регистрации, в зоне действия которых оказывается носитель метки, излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий подвижный объект.
Мобильные устройства регистрации системы мониторинга подвижных объектов могут быть оборудованы средствами сигнализации, срабатывающими при обнаружении меток системы позиционирования в непосредственной близости перед движущимся объектом.
Система мониторинга подвижных объектов может иметь программное обеспечение устройства обработки и визуализации данных, которое ведет архивирование информации стационарных считывателей о местоположении и перемещении подвижных объектов в каждый момент времени, формирует базу данных и отчеты задаваемого содержания и формы с текущими положениями и предысторией положения подвижных объектов, маршрутах движения и т.д.
Предлагаемая система существенно расширяет возможности мониторинга подвижных объектов, особенно в условиях неполного охвата зоны действия системы проводными или радиоканалами передачи данных, например при серьезных ограничениях в распространении радиоволн (подземные выработки) или в местах проведения взрывных работ, где высок риск повреждения проводных линий связи; процесс мониторинга при этом полностью автоматизирован.
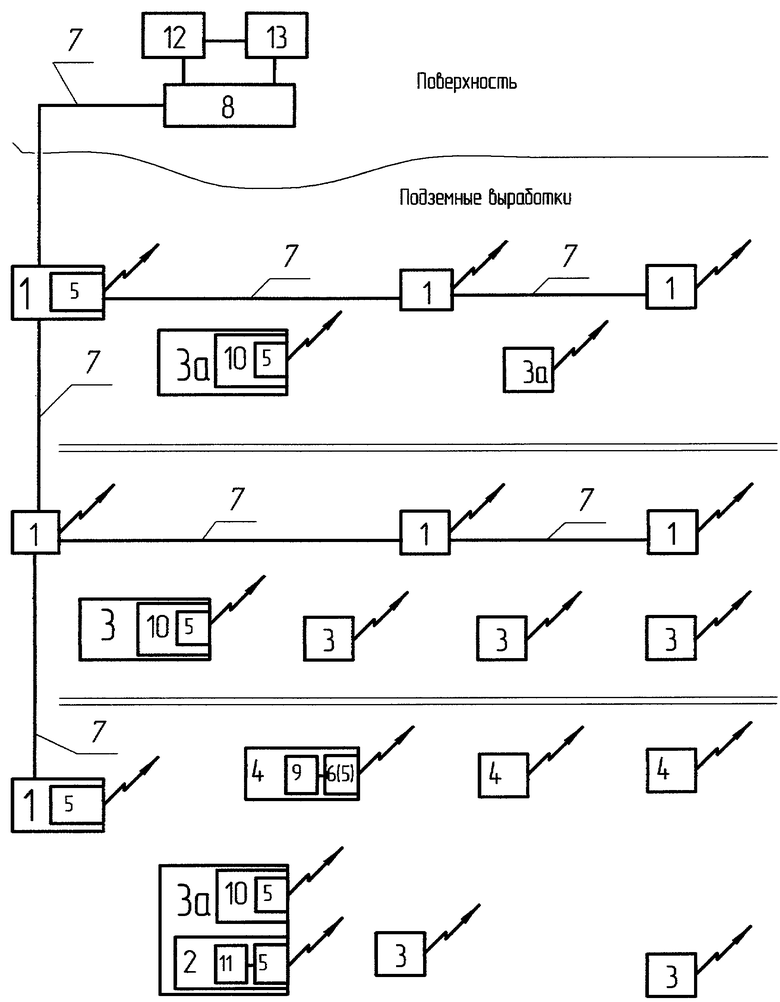
На чертеже изображена функциональная схема одного из вариантов предлагаемой системы мониторинга подвижных объектов, которым, естественно, не ограничивается многообразие возможностей ее применения.
Система состоит по крайней мере из одного стационарного считывателя 1, расположенного, например, в начальной точке маршрута, мобильных устройств регистрации 2, размещенных на подвижных объектах 3, и радиомаяков точек отметки 4, расположенных в характерных точках маршрута; при этом стационарные считыватели 1 и мобильные устройства регистрации 2 оснащены приемопередатчиками 5 радиосигналов ограниченного радиуса действия, а радиомаяки точек отметки 4 - передатчиками 6 ограниченного радиуса действия, периодически излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий место установки радиомаяка точки отметки 4; при появлении в контролируемых радиомаяками точек отметки 4 зонах подвижного объекта 3, оснащенного мобильным устройством регистрации 2, последнее по мере движения принимает сигналы от соответствующих радиомаяков точек отметки 4, фиксируя их уникальные номера и время регистрации; полученные данные передаются мобильным устройством регистрации 2 после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком 5 стационарного считывателя 1, в зоне действия которого оказывается объект 3 при дальнейшем движении.
Радиомаяки точек отметки 4 системы мониторинга подвижных объектов 3 могут быть оснащены приемопередатчиками 5 радиосигналов ограниченного радиуса действия, излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий место установки радиомаяка точки отметки 4, после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком 5 мобильного устройства регистрации 2.
Стационарные считыватели 1 системы мониторинга подвижных объектов 3 могут быть соединены информационной магистралью 7 между собой и устройством 8 обработки и визуализации данных.
Передатчики 6 (приемопередатчики 5) радиомаяков точек отметки 4 системы мониторинга подвижных объектов 3 могут получать питание от автономных источников (батарей) 9 и, наряду с уникальным номером, излучают информацию о степени разряженности питающей его батареи 9.
Система мониторинга подвижных объектов 3 может содержать размещенные на подвижных объектах 3 метки системы позиционирования 10, оснащенные приемопередатчиками 5 ограниченного радиуса действия; после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком 5 стационарного считывателя 1 или мобильного устройства регистрации 2, в зоне действия которого оказывается носитель метки 10, излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий подвижный объект 3.
Мобильные устройства регистрации 2 системы мониторинга подвижных объектов 3 могут быть оборудованы средствами сигнализации 11, срабатывающими при обнаружении меток системы позиционирования 10 в непосредственной близости перед движущимся объектом 3.
Система мониторинга подвижных объектов 3 может иметь программное обеспечение 12 устройства 8 обработки и визуализации данных, которое ведет архивирование информации стационарных считывателей 1 о местоположении и перемещении подвижных объектов 3 в каждый момент времени, формирует базы данных 13 и отчеты задаваемого содержания и формы с текущими положениями и предысторией положения подвижных объектов 3, маршрутах движения и т.д.
Система может быть построена как на базе специализированных, так и на базе типовых устройств. Приемопередатчики стационарных считывателей, мобильных устройств регистрации, радиомаяков точек отметки, меток системы позиционирования реализуются, например, на микросхеме приемопередатчика сверхвысокой частоты nRF24L01 фирмы Nordic Semiconductor по типовой схеме включения.
Система на примере горнорудного предприятия работает следующим образом.
Все подвижные объекты: горнорабочие 3, транспортные средства и подвижное оборудование 3а снабжаются метками системы позиционирования 10. Метки горнорабочих 3 входят в состав радиоблоков, встраиваемых в головные светильники. Идентификация внутришахтного транспорта 3а осуществляется с помощью радиоблока, входящего в состав головного светильника водителя (оператора) транспортного средства (подвижного оборудования) и программно связанного с транспортным средством (подвижным оборудованием), либо с помощью индивидуальной метки 10, технически и программно связанной с транспортным средством (подвижным оборудованием).
Стационарные считыватели 1 устанавливаются на входах в шахту (рудник), на границах участков, входах в штреки, уклоны, бремсберги и т.п., их количество определяется топологией горных выработок и желаемой точностью определения положения горнорабочих 3, транспортных средств и подвижного оборудование 3а. Расположение стационарных считывателей 1 должно обеспечивать разделение подземного пространства на непрерывную систему зон (участков). Стационарные считыватели 1, установленные на входах в шахту (рудник), контролируют наличие персонала в подземных выработках, установленные в подземных выработках, - наличие персонала в зонах считывания.
Транспортные средства и подвижное оборудование 3а, движение которых необходимо контролировать вне зоны действия стационарных считывателей 1, оснащаются мобильными устройствами регистрации 2.
Радиомаяки точек отметки 4 закладываются, например, в скважину (шпур), пробуренную в борту выработки, и ориентируются таким образом, чтобы поляризация их антенн совпадала с поляризацией антенны мобильного устройства регистрации 2. Радиомаяк точки отметки 4 представляет собой постоянно излучающий передатчик 6 (приемопередатчик 5, излучающий по запросу с мобильного устройства регистрации 2) с питанием от автономного источника 9 (батареи), не имеющий внешних проводных связей, выполняющий функцию идентификатора зоны (забоя, участка, выработки и т.п.), в которой контролируется появление носителя мобильного устройства регистрации 2 (внутришахтного транспорта или подвижного оборудования 3а). Передатчик 6 (приемопередатчик 5) радиомаяка точки отметки 4 с периодичностью не менее 10 раз в секунду (по запросу с мобильного устройства регистрации 2) посылает в эфир информацию, в которой содержится его уникальный номер и степень разряженности автономного источника 9 (батареи) питания.
При появлении в контролируемых зонах внутришахтного транспорта 3а установленное на нем мобильное устройство регистрации 2 принимает сигналы передатчиков 6 (приемопередатчиков 5) радиомаяков точек отметки 4 и фиксирует время их регистрации.
Полученные данные мобильное устройство регистрации 2 передает на стационарные считыватели 1, установленные в конечных точках маршрута, например в зонах погрузки и разгрузки, и далее на устройство 8 обработки и визуализации данных.
Программное обеспечение 12, установленное на устройстве 8 обработки и визуализации данных, обрабатывает информацию, полученную от всех радиомаяков точек отметки 4 и осуществляет построение маршрутов движения внутришахтного транспорта и подвижного оборудования 3а, подсчет количества выполненных рейсов и т.п.
Информация о степени разряженности автономного источника 9 (батареи) питания передается обслуживающему персоналу шахты для принятия решения о необходимости его замены.
Мобильное устройство регистрации 2 может выполнять функцию обнаружения персонала 3, оснащенного метками системы позиционирования 10, в непосредственной близости от движущегося внутришахтного транспорта 3а; при этом срабатывает соответствующая световая и звуковая сигнализация 11.
Стационарные считыватели 1 обеспечивают также регистрацию находящихся в зоне считывания радиоблоков (меток на транспорте, подвижном оборудовании) и передачу зарегистрированных номеров по запросу на устройство 8 обработки и визуализации данных. После подачи питания стационарные считыватели 1 посылают запросы на установление связи с метками системы позиционирования 10 в зоне своего действия, устанавливают с ними связь и получают их уникальные номера. Последовательная временная фиксация метки 10 горнорабочего 3 на разных стационарных считывателях 1 позволяет отследить маршрут его движения.
Программное обеспечение 12, функционирующее на устройстве 8 обработки и визуализации данных, управляет обменом данными со стационарными считывателями 1, организуя их периодический опрос, и заполняет базу данных 13, в которую заносятся время, номер стационарного считывателя 1 (местоположение носителя метки системы позиционирования 10), номер метки системы позиционирования 10 (идентификатор подвижного оборудования или табельный номер горнорабочего). Программное обеспечение 12 обрабатывает данные о положении и направлении движения меток системы позиционирования 10, определяя зоны (участки) горных выработок и наземных строений, в которых находятся их носители.
Изобретение относится к оборудованию, предназначенному для наблюдения за перемещением подвижных объектов и предоставления информации об их местонахождении соответствующим службам. Техническим результатом является расширение возможностей по мониторингу подвижных объектов. Система состоит из одного стационарного считывателя, расположенного в начальной точке маршрута, мобильных устройств регистрации, размещенных на подвижных объектах, и радиомаяков точек отметки, расположенных в характерных точках маршрута. При этом стационарные считыватели и мобильные устройства регистрации оснащены приемопередатчиками радиосигналов ограниченного радиуса действия, а радиомаяки точек отметки - передатчиками ограниченного радиуса действия, периодически излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий место установки радиомаяка точки отметки. При появлении в контролируемых радиомаяками точек отметки зонах подвижного объекта, оснащенного мобильным устройством регистрации, последнее по мере движения принимает сигналы от соответствующих радиомаяков точек отметки, фиксируя их уникальные номера и время регистрации; полученные данные передаются мобильным устройством регистрации после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком стационарного считывателя, в зоне действия которого оказывается объект при дальнейшем движении. 6 з.п. ф-лы, 1 ил.
1. Система мониторинга подвижных объектов, состоящая, по крайней мере, из одного стационарного считывателя, расположенного, например, в начальной точке маршрута, мобильных устройств регистрации, размещенных на подвижных объектах, и радиомаяков точек отметки, расположенных в характерных точках маршрута; при этом стационарные считыватели и мобильные устройства регистрации оснащены приемопередатчиками радиосигналов ограниченного радиуса действия, а радиомаяки точек отметки - передатчиками ограниченного радиуса действия, периодически излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий место установки радиомаяка точки отметки; при появлении в контролируемых радиомаяками точек отметки зонах подвижного объекта, оснащенного мобильным устройством регистрации, последнее по мере движения принимает сигналы от соответствующих радиомаяков точек отметки, фиксируя их уникальные номера и время регистрации; полученные данные передаются мобильным устройством регистрации после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком стационарного считывателя, в зоне действия которого оказывается объект при дальнейшем движении.
2. Система мониторинга подвижных объектов по п.1, радиомаяки точек отметки которой оснащены приемопередатчиками радиосигналов ограниченного радиуса действия, излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий место установки радиомаяка точки отметки, после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком мобильного устройства регистрации.
3. Система мониторинга подвижных объектов по п.1 или 2, стационарные считыватели которой соединены информационной магистралью между собой и устройством обработки и визуализации данных.
4. Система мониторинга подвижных объектов по п.1 или 2, маломощные передатчики (приемопередатчики) радиомаяков точек отметки которой получают питание от автономных источников (батарей) и, наряду с уникальным номером, излучают информацию о степени разряженности питающей его батареи.
5. Система мониторинга подвижных объектов по п.3, содержащая размещенные на подвижных объектах метки системы позиционирования, оснащенные приемопередатчиками ограниченного радиуса действия, после приема кодовой комбинации запроса, периодически излучаемой приемопередатчиком стационарного считывателя или мобильного устройства регистрации, в зоне действия которых оказывается носитель метки, излучающими в эфир информацию, содержащую уникальный номер, идентифицирующий подвижный объект.
6. Система мониторинга подвижных объектов по п.5, мобильные устройства регистрации которой оборудованы средствами сигнализации, срабатывающими при обнаружении меток системы позиционирования в непосредственной близости перед движущимся объектом.
7. Система мониторинга подвижных объектов по п.5, программное обеспечение устройства обработки и визуализации данных которой ведет архивирование информации стационарных считывателей о местоположении и перемещении подвижных объектов в каждый момент времени, формирует базу данных и отчеты задаваемого содержания и формы с текущими положениями и предысторией положения подвижных объектов, маршрутах движения.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ | 2004 |
|
RU2284542C2 |
| СИСТЕМА КОНТРОЛЯ ЗА ПЕРЕМЕЩЕНИЕМ И СОСТОЯНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2305327C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА В ЗАКРЫТЫХ ПОМЕЩЕНИЯХ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2351945C1 |
| Устройство соединения разделяемых элементов летательного аппарата | 2015 |
|
RU2630565C2 |
| US 2002167417 А1, 14.11.2002. | |||

