ЗАЯВЛЕНИЕ ПРИОРИТЕТА
Данная заявка основана на и притязает на приоритет заявок на патент Японии № 2006-193691, поданной 14 июля 2006 г., и № 2006-221778, поданной 16 августа 2006 г., содержание которых включено в настоящий документ в полном виде посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к навигационному серверу, который выполнен для обеспечения направления подвижного транспортного средства через навигационное устройство, смонтированное в подвижном транспортном средстве, на основе связи с навигационным устройством, к навигационному устройству, которое выполнено для направления подвижного транспортного средства на основе связи с навигационным сервером, и к навигационной системе, которая состоит из навигационного сервера и навигационного устройства.
УРОВЕНЬ ТЕХНИКИ
Поскольку сохранение окружающей среды Земли и эффективное использование энергетических ресурсов становятся все более важными для людей, улучшение расхода горючего на единицу расстояния транспортного средства было важной задачей.
Соответственно, был раскрыт способ (например, см. опубликованный патент Японии № 2002-350152, абзацы 0077-0079), в котором эко-показатель (экологический показатель) транспортного средства, относящийся к местоположению или маршруту индивидуально в информации карты, предварительно сохранен в базе данных; относительно местоположения или маршрута, определенного пользователем, осуществляется поиск его эко-показателя в базе данных, и извлеченный эко-показатель будет отображен, с перекрытием с информацией карты, на дисплее в терминале пользователя.
Был раскрыт другой способ (например, см. опубликованный патент Японии № 2005-163584, абзацы 0072-0075), в котором предсказываемый маршрут, который имеет наибольший расход горючего на единицу расстояния, транспортного средства извлекается из информационного центра посредством рассмотрения данных расхода горючего на единицу расстояния, зарегистрированных в базе данных, и извлеченный маршрут принимается от информационного центра и отображается на навигационном устройстве, установленном в транспортном средстве.
Однако, даже хотя транспортное средство с идентичным идентификатором едет по той же самой дороге, расход горючего на единицу расстояния транспортного средства будет изменяться согласно его рабочему состоянию, такому как схема ускорения и замедления и т.п. Следовательно, поиск или установление маршрута без рассмотрения состояния управления индивидуальным транспортным средством может быть практически неприемлемым с точки зрения расхода горючего на единицу расстояния движущегося транспортного средства.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Данное изобретение было осуществлено ввиду вышеупомянутых проблем, и, следовательно, задачей данного изобретения является обеспечение навигационной системы, которая может сделать вклад в направление подвижного транспортного средства, такого как транспортное средство и т.п., к позиции назначения вдоль подходящего маршрута с точки зрения экономии энергии.
Навигационный сервер согласно первому аспекту данного изобретения, который выполнен с возможностью обеспечения обработки, выполняемой навигационным устройством, установленным в подвижном транспортным средстве, служащем в качестве объекта обеспечения, на основе связи с этим подвижным транспортным средством, включает в себя: элемент хранения первой функции, который выполнен с возможностью хранения первой функции, представляющей собой соотношение между идентификатором транспортного средства для идентификации подвижного транспортного средства, рабочей информацией, представляющей рабочее состояние подвижного транспортного средства, и показателем энергии, представляющим величину энергии, потребляемую подвижным транспортным средством; элемент хранения второй функции, который выполнен с возможностью хранения второй функции, представляющей собой соотношение между идентификатором транспортного средства, идентификатором путевого отрезка для идентификации соответствующего путевого отрезка и показателем энергии; первый процессорный элемент обеспечения, который выполнен с возможностью распознавания идентификатора транспортного средства второго измерительного подвижного транспортного средства, идентификатора путевого отрезка, где прошло второе измерительное подвижное транспортное средство, и рабочей информации, детектируемой измерительным устройством, установленным во втором измерительном подвижном транспортном средстве, на основе связи с этим вторым измерительным подвижным транспортным средством; оценки показателя энергии для каждой комбинации идентификатора путевого отрезка и идентификатора транспортного средства согласно первой функции на основе результата распознавания; и установки или модификации второй функции на основе результата оценки; и второй процессорный элемент обеспечения, который выполнен с возможностью распознавания идентификатора транспортного средства подвижного транспортного средства, служащего в качестве объекта обеспечения; оценки показателя энергии для индивидуального идентификатора путевого отрезка согласно второй функции на основе результата распознавания; и предоставления возможности распознавания навигационным устройством, установленным в подвижном транспортном средстве, служащем в качестве объекта обеспечения, результата оценки или информации дорожного движения, определенной согласно результату оценки на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения.
Согласно навигационному серверу первого аспекта данного изобретения, на основе связи со вторым измерительным подвижным транспортным средством, распознаются идентификатор транспортного средства второго измерительного подвижного транспортного средства, идентификатор путевого отрезка и рабочая информация, представляющая рабочее состояние второго измерительного подвижного транспортного средства. «Связь с подвижным транспортным средством» относится к связи с коммуникационным инструментом, установленным в подвижном транспортном средстве. «Идентификатор транспортного средства» представляет собой информацию для идентификации второго измерительного подвижного транспортного средства, которая влияет на показатель энергии каждого второго измерительного подвижного транспортного средства. В частности, эта информация содержит тип, спецификацию и т.п. второго измерительного подвижного транспортного средства. «Идентификатор путевого отрезка» содержит информацию для идентификации путевого отрезка, которая относится к элементам дорог, соединяющим два произвольных местоположения на некоторой дороге, таким как пересечение, ответвление и т.п. «Рабочая информация» представляет рабочее состояние второго измерительного подвижного транспортного средства.
На основе распознанной информации, показатель энергии оценивается для каждой комбинации идентификатора транспортного средства и идентификатора путевого отрезка согласно первой функции, представляющей собой соотношение между идентификатором транспортного средства, рабочей информацией и показателем энергии. «Показатель энергии» представляет собой величину энергии, потребляемую индивидуальным вторым измерительным подвижным транспортным средством. Согласно этому величина потребляемой энергии индивидуального второго измерительного подвижного транспортного средства может быть соответствующим образом оценена путем рассмотрения рабочего состояния индивидуального второго измерительного подвижного транспортного средства на индивидуальном путевом отрезке.
Далее, на основе результата оценки, устанавливается вторая функция, представляющая собой соотношение между идентификатором транспортного средства, идентификатором путевого отрезка и показателем энергии. Как упомянуто выше, показатель энергии, представляющий собой величину потребления энергии вторым измерительным подвижным транспортным средством, может быть соответствующим образом оценен путем рассмотрения рабочего состояния второго измерительного подвижного транспортного средства на индивидуальном путевом отрезке, можно соответствующим образом установить вторую функцию с точки зрения расчета или предсказания рабочего состояния произвольного подвижного транспортного средства на индивидуальном путевом отрезке.
После этого, на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения, распознается идентификатор транспортного средства объекта обеспечения, а именно, подвижного транспортного средства. На основе результата распознавания, показатель энергии оценивается индивидуально для идентификатора путевого отрезка согласно второй функции. Этот показатель энергии, оцениваемый для индивидуального идентификатора путевого отрезка, или информация дорожного движения, определенная согласно этому показателю энергии, распознается навигационным устройством, установленным в подвижном транспортном средстве. Следовательно, показатель энергии, относящийся к индивидуальному идентификатору путевого отрезка, или информация дорожного движения, определенная согласно этому показателю энергии, может быть соответствующим образом оценена или сгенерирована с точки зрения оценки или предсказания рабочего состояния подвижного транспортного средства, служащего в качестве объекта обеспечения на индивидуальном путевом отрезке. Соответственно, можно направлять подвижное транспортное средство, служащее в качестве объекта обеспечения, с попыткой экономии энергии, от позиции отправления к позиции назначения на основе информации дорожного движения в навигационном устройстве.
Навигационный сервер согласно второму аспекту данного изобретения зависит от первого аспекта данного изобретения, в котором второй процессорный элемент обеспечения устанавливает один или несколько маршрутов обеспечения или распознает навигационный маршрут для направления подвижного транспортного средства, служащего в качестве объекта обеспечения, от позиции отправления к позиции назначения на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения; дополнительно распознает идентификатор путевого отрезка индивидуального путевого отрезка, которая составляет часть маршрута обеспечения или весь маршрут обеспечения или навигационный маршрут, или идентификатор путевого отрезка индивидуального путевого отрезка в области, которая включает в себя часть маршрута обеспечения или весь маршрут обеспечения или навигационный маршрут; и оценивает показатель энергии согласно второй функции на основе идентификатора путевого отрезка и идентификатора транспортного средства подвижного транспортного средства, служащего в качестве объекта обеспечения.
Согласно навигационному серверу второго аспекта данного изобретения, путевые отрезки, служащие в качестве объектов оценки показателя энергии, улучшаются до путевых отрезков, составляющих часть множественных маршрутов обеспечения или целые множественные маршруты обеспечения или навигационные маршруты, соединяющие позицию отправления и позицию назначения подвижного транспортного средства. Согласно этому путевые отрезки, служащие в качестве объектов оценки показателя энергии, улучшаются согласно необходимости в направлении подвижного транспортного средства, служащего в качестве объекта обеспечения, от позиции отправления к позиции назначения. Посредством этого можно ожидать экономии или эффективного использования обрабатывающих информацию ресурсов в навигационном сервере, необходимом для оценки показателя энергии; подобным же образом можно ожидать эффективного использования обрабатывающих информацию ресурсов в навигационном устройстве, необходимом для возможного выбора показателя энергии или информации дорожного движения, основанной на показателе энергии.
Навигационный сервер согласно третьему аспекту данного изобретения зависит от второго аспекта данного изобретения, в котором второй процессорный элемент обеспечения подробно оценивает показатель энергии для индивидуального маршрута из множества маршрутов обеспечения или навигационных маршрутов на основе оцениваемого показателя энергии; и позволяет навигационному устройству распознать идентификатор путевого отрезка, составляющего маршрут обеспечения или навигационный маршрут, имеющий максимальное значение подробной оценки в качестве информации дорожного движения.
Согласно навигационному серверу третьего аспекта данного изобретения, навигационное устройство, установленное в подвижном транспортном средстве, служащем в качестве объекта обеспечения, может распознать оптимальный маршрут обеспечения в качестве информации дорожного движения на основе результата оценки показателя энергии, с точки зрения направления, с попыткой экономии энергии, подвижного транспортного средства, служащего в качестве объекта обеспечения, от позиции отправления до позиции назначения. Тем самым навигационное устройство может направить подвижное транспортное средство, служащее в качестве объекта обеспечения, от позиции отправления к позиции назначения согласно подходящему маршруту обеспечения или подходящему навигационному маршруту, установленному навигационным устройством на основе маршрута обеспечения, с точки зрения экономии энергии.
Навигационный сервер согласно четвертому аспекту данного изобретения зависит от первого аспекта данного изобретения, в котором первый процессорный элемент обеспечения распознает информацию окружения, представляющую собой состояние окружения для некоторой области индивидуально; и оценивает показатель энергии для некоторого индивидуального путевого отрезка согласно расширенной первой функции, представляющей собой соотношение между идентификатором транспортного средства, идентификатором путевого отрезка, рабочей информацией, показателем энергии и информацией окружения, на основе информации окружения, идентификатор транспортного средства второго измерительного подвижного транспортного средства, идентификатор путевого отрезка индивидуального путевого отрезка в каждой области и рабочую информацию.
Согласно навигационному серверу четвертого аспекта данного изобретения, в дополнение к рабочему состоянию второго измерительного подвижного транспортного средства на индивидуальном путевом участке, можно соответствующим образом вычислить или предсказать величину потребления энергии, потребляемую произвольным подвижным транспортным средством на индивидуальном путевом участке путем рассмотрения состояния окружения в области, включающей в себя индивидуальный путевый участок.
Навигационный сервер согласно пятому аспекту данного изобретения зависит от первого аспекта данного изобретения, в котором первый процессорный элемент обеспечения распознает идентификатор транспортного средства первого измерительного подвижного транспортного средства, идентификатор путевого отрезка, где прошло первое измерительное подвижное транспортное средство, рабочую информацию первого измерительного подвижного транспортного средства и показатель энергии на основе связи с первым измерительным подвижным транспортным средством; и устанавливает или модифицирует первую функцию на основе результата оценки.
Согласно навигационному серверу пятого аспекта данного изобретения, первая функция может быть установлена на основе идентификатора транспортного средства первого измерительного подвижного транспортного средства, идентификатора путевого отрезка, где прошло это подвижное транспортное средство, рабочей информации и показателя энергии. Следовательно, первая функция может быть соответствующим образом установлена с точки зрения соответствующей оценки показателя энергии второго измерительного подвижного транспортного средства в каждом пройденном путевом участке, путем рассмотрения типа и т.п. второго измерительного подвижного транспортного средства, идентифицируемого идентификатором транспортного средства, и рабочего состояния второго измерительного подвижного транспортного средства.
Навигация шестого аспекта данного изобретения зависит от пятого аспекта данного изобретения, который дополнительно собран с устройством, которое работает в различных режимах согласно величине потребления энергии первым измерительным подвижным транспортным средством, в котором первый процессорный элемент распознает показатель, определенный согласно истории работы устройства, служащего в качестве объекта управления, на основе связи с первым измерительным подвижным транспортным средством, как показатель энергии.
Согласно навигационному серверу шестого аспекта данного изобретения, показатель, определенный согласно истории работы устройства, установленного в первом измерительном подвижном транспортном средстве на путевом участке, подлежащей прохождению первым измерительным подвижным транспортным средством, распознается как показатель энергии первого измерительного подвижного транспортного средства. Поскольку это устройство работает в различных режимах согласно величине потребления энергии первым измерительным подвижным транспортным средством, первая функция может быть соответствующим образом установлена с точки зрения оценки величины потребления энергии произвольным вторым измерительным подвижным транспортным средством.
Навигационный сервер согласно седьмому аспекту данного изобретения зависит от шестого аспекта данного изобретения, в котором первое измерительное подвижное транспортное средство собрано с индикатором, который показывает, что величина потребления энергии первым измерительным подвижным транспортным средством находится в низком состоянии, или с лампой, которая светится, когда величина потребления энергии находится в высоком состоянии, как устройством объекта управления; и первый процессорный элемент обеспечения распознает частоту отображения этого индикатора или частоту свечения лампы как показатель энергии на основе связи с первым измерительным подвижным транспортным средством.
Согласно навигационному серверу седьмого аспекта данного изобретения, частота отображения индикатора или частота свечения лампы распознается как показатель энергии первого измерительного подвижного транспортного средства. Поскольку индикатор отображает или лампа светится согласно уровню показателя энергии первого измерительного подвижного транспортного средства, первая функция может быть соответствующим образом установлена с точки зрения оценки величины потребления энергии произвольным вторым измерительным подвижным транспортным средством.
Навигационный сервер согласно восьмому аспекту данного изобретения зависит от первого аспекта данного изобретения, в котором первый процессорный элемент обеспечения распознает скорость и ускорение второго измерительного подвижного транспортного средства или историю позиционного перехода, детектируемую измерительным устройством как рабочую информацию.
Согласно навигационному серверу восьмого аспекта данного изобретения, посредством рассмотрения величины потребления энергии в связи со скоростью и т.п. второго измерительного подвижного транспортного средства на индивидуальном путевом участке, первая функция может быть соответствующим образом установлена с точки зрения подходящей оценки показателя энергии подвижного транспортного средства, служащего в качестве объекта обеспечения, на индивидуальном путевом участке.
Навигационный сервер согласно девятому аспекту данного изобретения зависит от восьмого аспекта данного изобретения, в котором первый процессорный элемент обеспечения оценивает показатель энергии путем использования линейной функции или по меньшей мере квадратичной функции, имеющей коэффициент в связи с идентификатором транспортного средства и скоростью и ускорением или скоростью и ускорением, определяемым согласно истории позиционного перехода, и скорость или ускорение как независимая переменная.
Согласно навигационному серверу девятого аспекта данного изобретения, путем рассмотрения величины потребления энергии в связи со скоростью и т.п. второго измерительного подвижного транспортного средства на индивидуальном путевом участке, первая функция может быть соответствующим образом установлена с точки зрения подходящей оценки показателя энергии подвижного транспортного средства, служащего в качестве объекта обеспечения, на индивидуальном путевом отрезке.
Навигационное устройство согласно десятому аспекту данного изобретения, которое выполнено с возможностью направления подвижного транспортного средства, служащего в качестве объекта обеспечения, на основе связи с навигационным сервером, включает в себя: первый процессорный элемент, который выполнен с возможностью распознавания позиции отправления и позиции назначения подвижного транспортного средства, служащего в качестве объекта обеспечения; и второй процессорный элемент, который выполнен с возможностью распознавания идентификатора путевого отрезка, который установлен навигационным сервером для идентификации индивидуального путевого отрезка, составляющего маршрут обеспечения, образуемый множеством путевых отрезков, соединяющих позицию отправления и позицию назначения, или индивидуального путевого отрезка из части путевых отрезков или всех путевых отрезков в области, включающей в себя маршрут обеспечения, и показателя энергии, который представляет собой величину потребления энергии подвижным транспортным средством, служащим в качестве объекта обеспечения, на основе связи с навигационным сервером, и выдает навигационный маршрут, соединяющий позицию отправления и позицию назначения, на основе результата распознавания.
Согласно навигационному устройству десятого аспекта данного изобретения, на основе показателя энергии, соответствующим образом оцениваемого навигационным сервером посредством рассмотрения рабочего состояния второго измерительного подвижного транспортного средства на индивидуальном путевом отрезке, подходящий маршрут может быть выдан с точки зрения направления подвижного транспортного средства, служащего в качестве объекта обеспечения, с попыткой экономии энергии, от позиции отправления к позиции назначения.
Навигационное устройство согласно одиннадцатому аспекту данного изобретения зависит от десятого аспекта данного изобретения, в котором первый процессорный элемент устанавливает навигационный маршрут; и второй процессорный элемент позволяет навигационному серверу распознать идентификатор путевого отрезка индивидуального путевого отрезка, составляющего навигационный маршрут, установленный первым процессорным элементом на основе связи с навигационным сервером; оценивает показатель энергии для индивидуального путевого отрезка, оцениваемый в навигационном сервере; и подробно оценивает показатель энергии навигационного маршрута.
Согласно навигационному устройству одиннадцатого аспекта данного изобретения, путевые отрезки, которые будут служить в качестве объектов оценки для показателя энергии навигационным сервером, или путевые отрезки, которые необходимы для результата оценки показателя энергии, улучшаются с точки зрения направления подвижного транспортного средства, служащего в качестве объекта обеспечения, от позиции отправления к позиции назначения. Соответственно, ожидается экономия ресурсов обработки информации, необходимых навигационному серверу для оценки показателя энергии. Тем самым, оптимальный навигационный маршрут может быть выдан с точки зрения направления подвижного транспортного средства, служащего в качестве объекта обеспечения, с попыткой экономии энергии, от позиции отправления к позиции назначения.
Навигационная система согласно двенадцатому аспекту данного изобретения состоит из навигационного устройства, которое установлено в подвижном транспортном средстве, служащем в качестве объекта обеспечения, и навигационного сервера, который выполнен с возможностью обеспечения обработки, выполняемой навигационным устройством на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения, в котором: навигационный сервер включает в себя элемент хранения первой функции, который выполнен с возможностью хранения первой функции, представляющей собой соотношение между идентификатором транспортного средства для идентификации подвижного транспортного средства, рабочей информацией, представляющей рабочее состояние подвижного транспортного средства, и показателем энергии, представляющим величину энергии, потребляемую подвижным транспортным средством; элемент хранения второй функции, который выполнен с возможностью хранения второй функции, представляющей собой соотношение между идентификатором транспортного средства, идентификатором путевого отрезка для идентификации соответствующего путевого отрезка и показателем энергии; первый процессорный элемент обеспечения, который выполнен с возможностью распознавания идентификатора транспортного средства второго измерительного подвижного транспортного средства, идентификатора путевого отрезка, где прошло второе измерительное подвижное транспортное средство, и рабочей информации, детектируемой измерительным устройством, установленным во втором измерительном подвижном транспортном средстве на основе связи со вторым измерительным подвижным транспортным средством; оценки показателя энергии для каждой комбинации идентификатора путевого отрезка и идентификатора транспортного средства согласно первой функции на основе результата распознавания; и установки или модификации второй функции на основе результата оценки; и второй процессорный элемент обеспечения, который выполнен с возможностью распознавания идентификатора транспортного средства подвижного транспортного средства, служащего в качестве объекта обеспечения; оценки показателя энергии для идентификатора индивидуального путевого отрезка согласно второй функции на основе результата распознавания; и предоставления возможности распознавания навигационным устройством, установленным в подвижном транспортном средстве, служащем в качестве объекта обеспечения, результата оценки или информации дорожного движения, определенной согласно результату оценки на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения, навигационное устройство включает в себя первый процессорный элемент, который выполнен с возможностью распознавания позиции отправления и позиции назначения подвижного транспортного средства, служащего в качестве объекта обеспечения; и второй процессорный элемент, который выполнен с возможностью распознавания идентификатора путевого отрезка, который установлен навигационным сервером для идентификации индивидуального путевого отрезка, составляющей маршрут обеспечения, образуемый множеством путевых отрезков, соединяющих позицию отправления и позицию назначения или индивидуальный путевый отрезок части путевых отрезков или всех путевых отрезков в области, включающей в себя маршрут обеспечения, и показателя энергии, который представляет собой величину потребления энергии подвижным транспортным средством, служащим в качестве объекта обеспечения, на основе связи с навигационным сервером, и выдачи навигационного маршрута, соединяющего позицию отправления и позицию назначения, на основе результата распознавания.
Согласно навигационной системе двенадцатого аспекта данного изобретения, подвижное транспортное средство, служащее в качестве объекта обеспечения, может быть направлено, с попыткой экономии энергии, от позиции отправления к позиции назначения на основе результата оценки показателя энергии, распознаваемого согласно связи с навигационным сервером, или информации дорожного движения в навигационном устройстве.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 иллюстрирует конфигурацию системы управления информацией дорожного движения согласно данному изобретению.
Фиг.2 иллюстрирует функции системы управления информацией движения согласно данному изобретению.
Фиг.3 иллюстрирует функции системы управления информацией движения согласно данному изобретению.
Фиг.4 иллюстрирует функции системы управления информацией движения согласно данному изобретению.
Фиг.5 иллюстрирует функции системы управления информацией движения согласно данному изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее будет подробно описан вариант осуществления навигационной системы согласно данному изобретению со ссылкой на чертежи.
Описания будут даны на конфигурации навигационной системы.
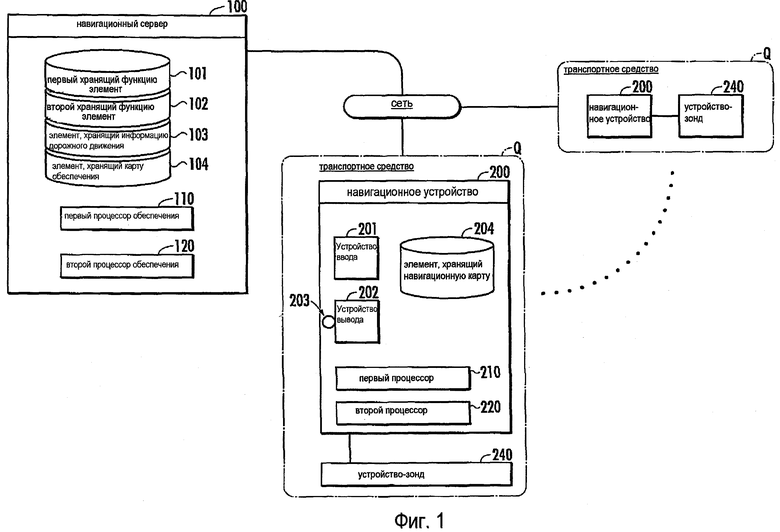
Навигационная система, показанная на фиг.1, включает в себя навигационный сервер 100 и навигационное устройство 200, установленное в транспортном средстве (подвижном транспортном средстве) Q. Транспортное средство Q собрано с измерительным устройством 240. Благодаря установленному измерительному устройству 240, которое будет описано далее, транспортное средство Q может рассматриваться как одно или оба из первого измерительного автомобиля (первого измерительного подвижного транспортного средства) Q1 и второго измерительного автомобиля (второго измерительного подвижного транспортного средства) Q2; благодаря установленному навигационному устройству 200, транспортное средство Q может рассматриваться как объект обеспечения. Следует отметить, что в дополнение к четырехколесному транспортному средству, подвижное транспортное средство согласно данному изобретению включает в себя произвольное устройство, которое движется посредством потребления энергии от двигателя внутреннего сгорания, батареи и т.п. согласно управлению и т.п. пользователя, такое как двухколесное транспортное средство и т.п.
Навигационный сервер 100 состоит из одного или множественных компьютеров-серверов (включающих в себя ЦП, ПЗУ, ОЗУ, ввод/вывод и т.п.). Навигационный сервер 100 снабжен элементом 101 хранения первой функции, элементом 102 хранения второй функции, элементом 103 хранения информации дорожного движения, элементом 104 хранения карты обеспечения, первым процессорным элементом 110 обеспечения и вторым процессорным элементом 120 обеспечения.
Элемент 101 хранения первой функции хранится с первой функцией f1, представляющей соотношение между идентификационным номером транспортного средства (идентификатором транспортного средства) VIN для идентификации транспортного средства Q, рабочей информацией OPi, представляющей рабочее состояние транспортного средства Q, и эко-показателем (показателем энергии) ECOi, представляющим величину энергии, потребляемую транспортным средством Q.
Элемент 102 хранения второй функции хранится со второй функцией f2, представляющей соотношение между идентификационным номером VIN транспортного средства, идентификатором Li путевого отрезка для идентификации индивидуального путевого отрезка и эко-показателем ECOi.
Элемент 103 хранения информации дорожного движения хранится с информацией дорожного движения, передаваемой от центрального сервера дорожной информации и т.п. (не показан) к навигационному серверу 100, такой как время, необходимое для перемещения на индивидуальном путевом отрезке, и состояние дорожных пробок на индивидуальном путевом отрезке, информация, представляющая состояние регулирования движения для индивидуального путевого отрезка, состояние события и тип события (если было событие) вокруг индивидуального путевого отрезка и т.п.
Элемент 104 хранения карты обеспечения хранится с информацией карты обеспечения. В информации карты обеспечения, местоположение, форма и состояние и т.п. индивидуального путевого отрезка, составляющего дорогу, выражены посредством ряда координат ((широта, долгота), или (широта, долгота, высота)). Кроме того, индивидуальный путевый отрезок помечен идентификатором Li путевого отрезка для идентификации индивидуального путевого отрезка и данных типа дороги.
Первый процессорный элемент 110 обеспечения, на основе связи с первым измерительным автомобилем Q1, распознает идентификационный номер VIN транспортного средства первого измерительного автомобиля Q1, идентификатор Li путевого отрезка индивидуального путевого отрезка, пройденной первым измерительным автомобилем Q1, рабочую информацию OPi, детектируемую или определяемую измерительным устройством 240, установленным в первом измерительном автомобиле Q1, и эко-показатель ECOi. На основе результата распознавания, первый процессорный элемент 110 обеспечения устанавливает или модифицирует первую функцию f1.
Первый процессорный элемент 110 обеспечения, на основе связи со вторым измерительным автомобилем Q2, распознает идентификационный номер VIN транспортного средства второго измерительного автомобиля Q2, идентификатор Lj путевого отрезка индивидуального путевого отрезка, пройденной вторым измерительным автомобилем Q2, и рабочую информацию OPj, детектируемую или определяемую измерительным устройством 240, установленным во втором измерительном автомобиле Q2. На основе результата распознавания, первый процессорный элемент 110 обеспечения оценивает эко-показатель ECOj для каждой комбинации идентификатора Lj путевого отрезка и идентификационного номера VIN транспортного средства и устанавливает или модифицирует вторую функцию f2 на основе результата оценки.
Второй процессорный элемент 120 обеспечения, на основе связи с автомобилем Q объекта обеспечения, распознает идентификационный номер VIN транспортного средства автомобиля Q объекта обеспечения. На основе результата распознавания, второй процессорный элемент 120 обеспечения оценивает эко-показатель ECOk для каждого идентификатора Lk путевого отрезка согласно второй функции f2. На основе связи с автомобилем Q объекта обеспечения, второй процессорный элемент 120 обеспечения позволяет навигационному устройству 200, установленному в автомобиле Q объекта обеспечения, распознать результат оценки или информацию дорожного движения, определенную согласно результату оценки.
Навигационное устройство 200 состоит из ECU или компьютера, установленного в транспортном средстве Q в качестве аппаратного обеспечения, и навигационной программы, которая обеспечивает этот компьютер различными функциями. Следует отметить, что навигационная программа может быть предварительно установлена в памяти (ПЗУ) компьютера транспортного средства; или вся или часть навигационной программы может быть загружена или передана от сервера (не показан) через сеть или спутник в компьютер транспортного средства для хранения в его памяти (ЭСППЗУ, ОЗУ) и т.п. в произвольной синхронизации, когда имеется запрос и т.п. от компьютера транспортного средства.
Навигационное устройство 200 снабжено устройством 201 ввода, устройством 202 вывода, эко-лампой 203, элементом 204 хранения навигационной карты, первым процессорным элементом 210 обеспечения и вторым процессорным элементом 220 обеспечения.
Узел 201 ввода состоит из кнопок управления, расположенных в центральном пульте управления, и микрофона в транспортном средстве Q. Пользователь может выполнять различные настройки путем управления узлом 201 ввода или подачи ему голосовых команд. Устройством 202 вывода является дисплей, расположенный в центральном пульте управления транспортного средства Q, для отображения на экране или вывода информации карт и т.п.
Навигационное устройство 200 определяет, равен ли расход горючего на единицу расстояния (= величина потребления топлива/расстояние движения) измерительного автомобиля Qx (x=1, 2) эталонному значению или меньше его. В случае, если определено, что расход горючего на единицу расстояния равен или меньше, чем эталонное значение, эко-лампа 203 зажигается; с другой стороны, в случае, если определено, что расход горючего на единицу расстояния больше, чем эталонное значение, эко-лампа 203 функции выключается. Поскольку эко-лампа 203 зажигается, когда транспортное средство едет при хорошем расходе горючего на единицу расстояния, это может дать водителю стимул уделить внимание экологически дружественному вождению с меньшей величиной потребления энергии.
Элемент 204 хранения навигационной карты хранится с информацией навигационной карты и т.п., подлежащей выводу на устройство 202 вывода. В информации навигационной карты, местоположение, форма и состояние и т.п. индивидуального путевого отрезка, составляющего дорогу, выражены посредством ряда координат ((широта, долгота), или (широта, долгота, высота)). Кроме того, индивидуальный путевый отрезок помечен идентификатором Li путевого отрезка для идентификации индивидуального путевого отрезка и данных типа дороги. Даже если определения координат в информации навигационной карты и информации карты обеспечения являются различными из-за различных спецификаций и архитектур данных между ними, можно согласовать путевые отрезки путем пометки идентичных путевых отрезков общим идентификатором путевого отрезка.
Первый процессорный элемент 210 распознает позицию p1 отправления и позицию р2 назначения автомобиля Q объекта обеспечения. Второй процессорный элемент 220 распознает идентификатор Lk путевого отрезка, который устанавливается навигационным сервером 100 для идентификации индивидуального путевого отрезка, составляющей маршрут R обеспечения, образованный множеством путевых отрезков, соединяющих позицию p1 отправления и позицию р2 назначения, или индивидуальным путевым отрезком части или всех путевых отрезков в области, включающей в себя маршрут R обеспечения, и показатель ECOk энергии, который представляет собой величину потребления энергии автомобилем Q объекта обеспечения, на основе связи с навигационным сервером 100, и выводит навигационный маршрут r, соединяющий позицию p1 отправления и позицию p2 назначения на основе результата распознавания.
Рабочая информация, детектируемая или определяемая измерительным устройством 240, представляет собой рабочее состояние измерительного автомобиля Qx, включающее в себя часть или всю историю переходов позиций (позицию в каждый заданный момент времени), скорость (может быть вычислена, например, из истории переходов позиций), ускорение, историю переходов скоростей, историю переходов ускорений измерительного автомобиля Q; историю управления некоторым устройством (двигателем, установкой для кондиционирования воздуха и т.п.), установленным в измерительном автомобиле Qx; и т.п. Частота свечения эко-лампы 203 определяется как эко-показатель ECOi посредством измерительного устройства 240.
Отметим, что «компонент, служащий в качестве аппаратного обеспечения, «распознает» информацию» означает, что этот компонент выполняет возможную обработку информации на части информации для подготовки части информации, готовой для другой обработки информации, например, компонент принимает эту часть информации; осуществляет поиск этой части информации в базе данных или в памяти; вычисляет, оценивает, конфигурирует, определяет, осуществляет поиск этой части информации и т.п. через обработку на основе принимаемой информации и т.п.; извлекает информацию путем декодирования пакетов и сохраняет в памяти и т.п. эту вычисленную информацию и т.п. Кроме того, «компонент, служащий в качестве аппаратного обеспечения, «выдает» информацию» означает, что этот компонент выдает информацию в форме картинки, голоса, вибрации и т.п., которая может быть распознана человеком посредством его пяти чувств, таких как зрение, слух, осязание и т.д.
Функции вышеупомянутой навигационной системы будут описаны со ссылкой на фиг.2-5.
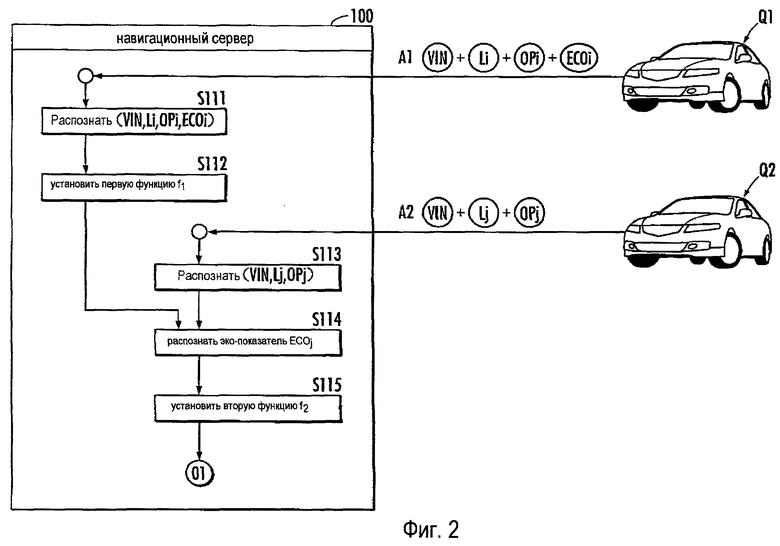
Во-первых, идентификационный номер транспортного средства (серийный номер изготовителя и т.п. для идентификации типа и технических условий автомобиля) VIN первого измерительного автомобиля Q1, идентификатор Li путевого отрезка (может быть определен согласно совпадению между информацией навигационной карты и позицией, определенной путем использования функции GPS, датчика ускорения, гироскопического датчика и т.п.) индивидуального путевого отрезка, где прошел первый измерительный автомобиль Q1, рабочая информация OPi, такая как скорость и т.п. первого измерительного автомобиля Q1, и эко-показатель ECOi передаются или загружаются в качестве «первой информации» от первого измерительного автомобиля Q1 к навигационному серверу 100 (фиг.2, стрелка А1). В качестве альтернативы частоте свечения эко-лампы 203 первого измерительного автомобиля Q1, допустимо оценивать историю работы другого автомобильного устройства (величина впрыскивания топлива в двигатель внутреннего сгорания и т.п.) в качестве эко-показателя ECOi.
Первый процессорный элемент 110 обеспечения распознает первую информацию (VIN, Li, OPi, ECOi) (фиг-2/S111) и устанавливает первую функцию f1, выражаемую следующим равенством (1), на основе первой информации (VIN, Li, OPi, ECOi) (фиг.2/3112).

Установление первой функции f1 относится к построению соотношения между идентификационным номером VIN транспортного средства, путевым отрезком Li, рабочей информацией OPi и эко-показателем ECOi, другими словами, к построению базы данных, таблицы, алгоритма и т.п., который может быть использован для вычисления или определения последней переменной от любых трех переменных в упомянутых 4 переменных. Первая функция f1 может быть установлена как линейная функция или по меньшей мере квадратичная функция, имеющая коэффициент, относящийся к скорости или ускорению и скорости или ускорению в качестве независимой переменной.
Идентификационный номер транспортного средства второго измерительного автомобиля Q2, идентификатор Lj путевого отрезка, где прошел второй измерительный автомобиль Q2, и рабочая информация OPj, такая как скорость и т.п. второго измерительного автомобиля Q2, передаются или загружаются в качестве «второй информации» от второго измерительного автомобиля Q2 к навигационному серверу 100 (фиг.2, стрелка А2).
Первый процессорный элемент 110 обеспечения распознает вторую информацию (VIN, Lj, OPj) (фиг.2/S113) и оценивает эко-показатель ECOj для индивидуального путевого отрезка, где прошел второй измерительный автомобиль Q2 согласно первой функции f1 на основе второй информации (VIN, Lj, OPj) (фиг.2/S114).
Первый процессорный элемент 110 обеспечения устанавливает вторую функцию f2, выражаемую следующим равенством (2), на основе идентификационного номера VIN транспортного средства и идентификатора Lj путевого отрезка второй информации и результата оценки на эко-показателе ECOj (фиг.2/S115).

Установление второй функции f2 относится к построению соотношения между идентификационным номером VIN транспортного средства, идентификатором Lj путевого отрезка и эко-показателем ECOj, другими словами, к построению базы данных, таблицы, алгоритма и т.п., который может использоваться для вычисления или определения последней переменной от любых двух переменных в упомянутых 3 переменных.
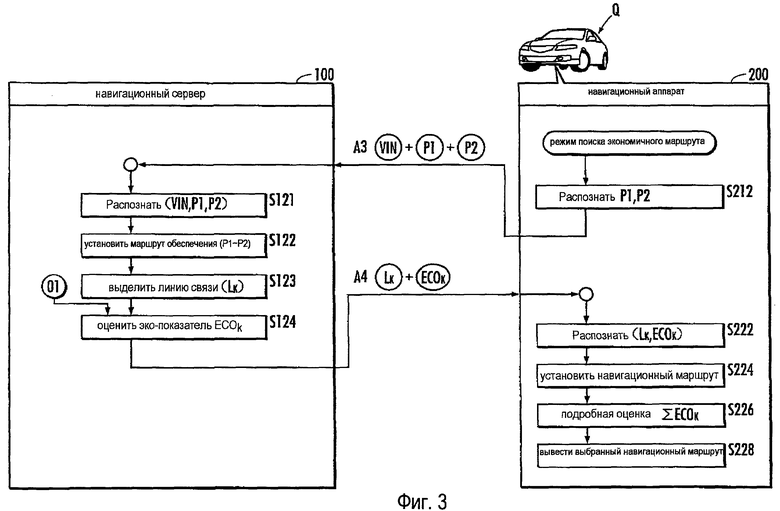
Далее будут даны описания для случая, когда выбирается «режим поиска эко-маршрута» для поиска подходящего маршрута с точки зрения вождения при благоприятном расходе горючего на единицу расстояния согласно управлению, осуществляемому пользователем на устройстве 201 ввода, обеспеченном в навигационном устройстве 200, которое установлено в автомобиле Q объекта обеспечения.
Во-первых, первый процессорный элемент 210 определяет позицию отправления или данную позицию p1 транспортного средства Q и распознает его позицию р2 назначения (фиг.3/3212). Данная позиция p1 вычисляется или определяется согласно сигналам GPS, принимаемым GPS приемником, или обработке и т.п. выходных сигналов от датчика ускорения или гироскопического датчика, установленного в транспортном средстве. Позиция p2 назначения автомобиля Q объекта обеспечения вводится в навигационное устройство 200 от устройства 201 ввода пользователем. Кроме того, позиция p1 отправления и позиция р2 назначения, вместе с идентификационным номером VIN транспортного средства, передаются или загружаются в качестве «информации запроса обеспечения» к навигационному серверу 100 от автомобиля Q объекта обеспечения (фиг.3, стрелка A3).
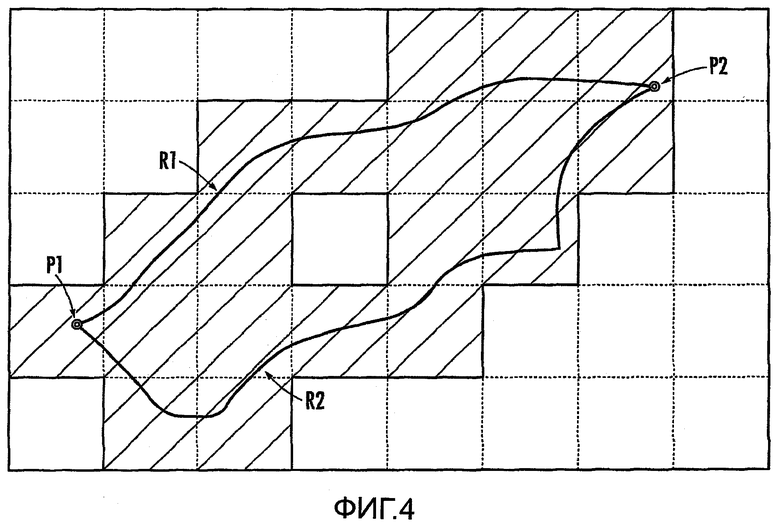
Согласно этому, второй процессорный элемент 120 обеспечения в навигационном сервере 100 распознает информацию запроса обеспечения (VIN, p1, р2) (фиг.3/S121) и устанавливает единственный маршрут или множество маршрутов R обеспечения, который соединяет данную позицию p1 и позицию p2 назначения, на основе информации дорожного движения, хранимой в элементе 103 хранения информации дорожного движения, и информации карты обеспечения, хранимой в элементе 104 хранения карты обеспечения (фиг.3/S122). Следовательно, в примере, показанном на фиг.4, установлены два маршрута R1 и R2 обеспечения, которые соединяют данную позицию p1 и позицию р2 назначения автомобиля Q объекта обеспечения.
После этого второй процессорный элемент 120 обеспечения выделяет идентификаторы Lk путевого отрезка для множества путевых отрезков, включенных в область, содержащую часть маршрута R обеспечения, из информации навигационной карты, хранимой в элементе 204 хранения навигационной карты (фиг.3/S123). Соответственно, например, из множества прямоугольных сеток (областей), показанных на фиг.4, выделяются или выбираются идентификаторы Lk путевых отрезков для всех путевых отрезков, содержащих часть маршрута R1 или R2 обеспечения, включенную в пунктирные сетки. Тем самым, путевые отрезки, служащие в качестве объекта оценки показателя энергии ECOk, уточняются согласно необходимости для направления автомобиля Q объекта обеспечения от позиции p1 отправления к позиции р2 назначения. В результате этого, ожидается экономия или эффективное использование ресурсов обработки информации, необходимых для оценки эко-показателя ECOk и т.п. в навигационном сервере 100, и ресурсов обработки информации, необходимых для возможного выбора эко-показателя ECOk или информации дорожного движения на основе эко-показателя ECOk в навигационном устройстве 200. Следует отметить, что допустимо выделять идентификаторы Lk путевых отрезков для путевых отрезков, составляющих часть маршрута или весь маршрут R обеспечения.
Второй процессорный элемент 120 обеспечения, на основе идентификационного номера VIN транспортного средства и выделенного идентификатора Lk путевого отрезка (фиг.3/S123), которые включены в информацию запроса обеспечения, оценивает эко-показатель ECOk для индивидуального путевого отрезка, идентифицируемого идентификатором Lk путевого отрезка согласно второй функции f2 (фиг.3/S124).
После этого второй процессорный элемент 120 обеспечения передает к автомобилю Q объекта обеспечения, идентифицируемому идентификационным номером VIN транспортного средства, или загружает комбинацию идентификатора Lk путевого отрезка и эко-показателя ECOk в качестве информации дорожного движения (фиг.3, стрелка А5).
Согласно этому второй процессорный элемент 220 в навигационном устройстве 200, установленном в автомобиле Q объекта обеспечения, распознает информацию дорожного движения (Lk, ECOk) (фиг.3/S222).
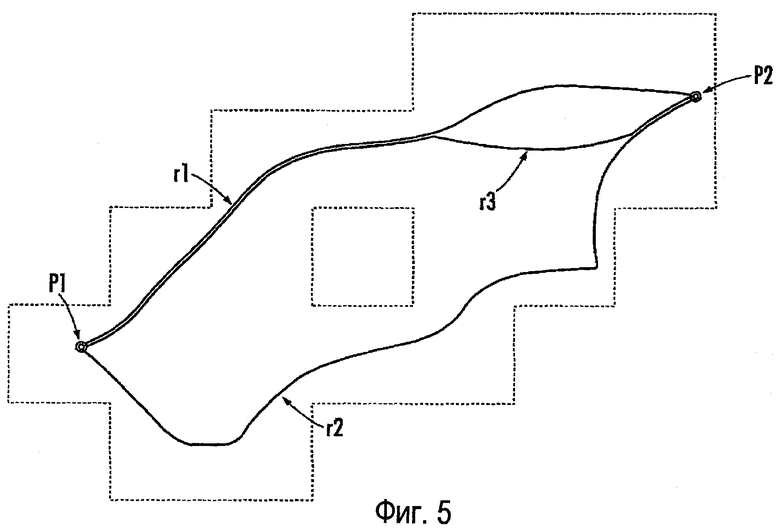
Затем, второй процессорный элемент 220, на основе информации навигационной карты, хранимой в элементе 204 хранения навигационной карты, и информации дорожного движения (Lk, ECOk) устанавливает единственный маршрут или множество навигационных маршрутов, соединяющих позицию отправления или данную позицию p1 и позицию p2 назначения (фиг.3/S224). Например, как показано на фиг.5, установлено 3 навигационных маршрута r1-r3, соединяющих позицию отправления или данную позицию p1 и позицию р2 назначения. Навигационные маршруты r1 и r2, установленные в навигационном устройстве 200, идентичны маршрутам R1 и R2 обеспечения, установленным в навигационном сервере 100, соответственно (см. фиг.4), по той причине, что маршруты R1 и R2 обеспечения воспроизводятся целиком в навигационном устройстве 200. С другой стороны, навигационный маршрут r3, установленный в навигационном устройстве 200, частично отличается от маршрутов R1 и R2, установленных в навигационном сервере 100, соответственно.
После этого второй процессорный элемент 220, на основе информации дорожного движения (идентификатора Lk путевого отрезка и эко-показателя ECOk), оценивает сумму эко-показателей ECOk, другими словами, исчерпывающим подробно оценивает Σk ECOk навигационного маршрута r (фиг.3/S226). Если подробная оценка Σk ECOk эко-показателей ECOk достигает максимального значения или больше, чем пороговое значение, то второй процессорный элемент 220 выбирает навигационный маршрут r и выдает выбранный навигационный маршрут r через устройство 202 вывода (фиг.3/S228). Например, в трех маршрутах r1, r2 и r3 обеспечения, показанных на фиг.5, когда Σk ECOk эко-показателей ECOk для маршрута r2 достигает максимального значения, маршрут r2 обеспечения перекрывается информацией навигационной карты и отображается на устройстве 202 вывода.
Согласно навигационной системе, имеющей функции, упомянутые выше, первая функция f1 строится на основе первой информации (идентификационного номера VIN транспортного средства, идентификатора Li путевого отрезка, рабочей информации OPi и эко-показателя ECOi), полученной от множества первых измерительных автомобилей Q1 (см. фиг.2/S111-S112 и равенство (1)). Следовательно, можно установить подходящую первую функцию f1 с точки зрения подходящей оценки эко-показателя ECOj для индивидуального путевого отрезка, подлежащего прохождению вторым измерительным автомобилем Q2, посредством рассмотрения типа модели и т.п. второго измерительного автомобиля Q2, идентифицируемого согласно идентификационному номеру VIN транспортного средства, и рабочего состояния второго измерительного автомобиля Q2.
Кроме того, на основе второй информации (идентификационный номер VIN транспортного средства, идентификатор Lj путевого отрезка, рабочая информация OPj), получаемой от множества вторых измерительных автомобилей Q2, эко-показатель ECOj оценивается для каждой комбинации идентификационного номера VIN транспортного средства и идентификатора Lj путевого отрезка согласно первой функции f1 (фиг.2/S113). Далее, на основе результата оценки и второй информации, устанавливается вторая функция f2 (см. фиг.2/S114 и S115, равенство (2)). Как упоминалось выше, эко-показатель ECOj, представляющий собой величину потребления энергии для второго измерительного автомобиля Q2, может быть соответствующим образом оценен путем рассмотрения рабочего состояния второго измерительного автомобиля Q2 на индивидуальном путевом отрезке, посредством этого, можно соответствующим образом установить вторую функцию f2 с точки зрения расчета или предсказания рабочего состояния произвольного транспортного средства Q на индивидуальном путевом отрезке.
Впоследствии, на основе информации запроса обеспечения (идентификационный номер VIN транспортного средства, позиция отправления или данная позиция p1 и позиция р2 назначения), полученной от автомобиля Q объекта обеспечения, устанавливается маршрут R обеспечения, соединяющий позицию отправления и позицию назначения. На основе маршрута R обеспечения, выделяется идентификатор Lk путевого отрезка (путевый отрезок, идентифицируемый идентификатором Lk путевого отрезка) (фиг.3/S121-S123). Другими словами, путевые отрезки, служащие в качестве объекта оценки эко-показателя ECOk, уточняются согласно необходимости в направлении автомобиля Q объекта обеспечения от позиции p1 отправления к позиции p2 назначения. Посредством этого, ожидается экономия или эффективное использование ресурсов обработки информации, необходимых для оценки и передачи эко-показателя ECOk в навигационном сервере 100, и ресурсов обработки информации, необходимых для возможного выбора эко-показателя ECOk или информации дорожного движения на основе эко-показателя ECOk в навигационном устройстве 200.
На основе результата распознавания и выделения, эко-показатель ECOk для идентификатора Lk путевого отрезка индивидуально оценивается согласно второй функции f2 (фиг.3/S124). Далее, эко-показатель ECOk, индивидуально оцененный для идентификатора Lk путевого отрезка, может быть распознан навигационным устройством 200, установленным в автомобиле Q объекта обеспечения (фиг.3, стрелка 4). Посредством этого, эко-показатель ECOk, относящийся к идентификатору Lk путевого отрезка индивидуально, может быть оценен соответствующим образом с точки зрения оценки или предсказания рабочего состояния автомобиля Q объекта обеспечения на индивидуальном путевом отрезке. Соответственно, величина потребления энергии автомобиля Q объекта обеспечения, едущего по навигационному маршруту r, может быть корректно оценена в навигационном устройстве 200. На основе результата оценки или информации дорожного движения, можно направлять, с попыткой экономии энергии, автомобиль Q объекта обеспечения от позиции p1 отправления к позиции р2 назначения (см. фиг.5).
Отметим, что для первого процессорного элемента 210 навигационного устройства 200, установленного в автомобиле Q объекта обеспечения, допустимо установить навигационный маршрут r, передать идентификатор Lk путевого отрезка, составляющей часть или весь навигационный маршрут r, к навигационному серверу 100 в качестве информации запроса обеспечения и оценить эко-показатель ECOk, соответствующий идентификатору Lk путевого отрезка, включенному в информацию обеспечения поддержки, в навигационном сервере 100. Посредством этого, ожидается экономия или эффективное использование ресурсов обработки информации, необходимых для оценки и передачи эко-показателя ECOk в навигационном сервере 100, и ресурсов обработки информации, необходимых для возможного выбора эко-показателя ECOk или информации дорожного движения на основе эко-показателя ECOk в навигационном устройстве 200.
Кроме того, для второго процессорного элемента 120 обеспечения допустима подробная оценка соответствующего эко-показателя ECOk для множества маршрутов R обеспечения (или навигационных маршрутов r, установленных в навигационном устройстве 200) и осуществление того, что навигационное устройство 200 распознает, в качестве информации дорожного движения, идентификатор Lk путевого отрезка, составляющей маршрут R обеспечения (или навигационный маршрут r) в случае, когда подробная оценка достигает максимального значения. Соответственно, для навигационного устройства 200, установленного в автомобиле Q объекта обеспечения, возможно распознавание оптимального маршрута R обеспечения согласно результату оценки эко-показателя ECOk с точки зрения направления, с попыткой экономии энергии, автомобиля Q объекта обеспечения от позиции p1 отправления к позиции р2 назначения.
Также для первого процессорного элемента 110 обеспечения возможно распознавание, на основе связи с сервером, таким как сервер информации окружающей среды и т.п., информации окружающей среды (информации о погоде, такой как погода, температура, влажность, величина дождя, накопление снега и т.п., имеются ли повреждения от землетрясения, наводнения и т.п. и их последствия и т.д.), представляющей состояние окружающей среды во множестве областей, и оценка эко-показателя ECOk для индивидуального путевого отрезка согласно расширенной первой функции f1, представляющей собой соотношение между расширенной первой информацией (VIN, Lj, OPj, ECOj, и информация окружающей среды) на основе информации окружающей среды, идентификационного номера VIN транспортного средства второго измерительного автомобиля Q2, идентификатора Lj путевого отрезка индивидуального путевого отрезка, содержащейся в каждой области, и рабочей информации OPi. Согласно этому можно соответствующим образом предсказать или оценить величину потребления энергии, потребленную произвольным вторым измерительным автомобилем Q2 на индивидуальном путевом отрезке путем рассмотрения состояния окружающей среды в области, содержащей индивидуальный путевый отрезок, в дополнение к рабочему состоянию второго измерительного автомобиля Q2 на индивидуальном путевом отрезке.
В вышеприведенном варианте осуществления, первая функция f1 устанавливается на основе первой информации, полученной от первого измерительного автомобиля Q1. В качестве другого варианта осуществления, можно предварительно устанавливать первую функцию f1 согласно некоторому эмпирическому правилу и т.п.
Хотя данное изобретение было объяснено в связи с предпочтительными вариантами осуществления и чертежами, оно не ограничено ими, и следует отметить, что и другие возможные модификации и вариации, сделанные не выходя за рамки сущности и объема изобретения, будут содержаться в данном изобретении. Следовательно, прилагаемая формула изобретения охватывает все такие изменения и модификации как находящиеся в пределах сущности и объема данного изобретения.
Изобретение относится к области навигации транспортных средств как объектов обеспечения. Согласно информации об измерительном подвижном транспортном средстве эко-показатель оценивается для каждой комбинации из идентификатора путевого отрезка и идентификатора транспортного средства в соответствии с первой функцией. По результату оценки устанавливается вторая функция. Согласно информации запроса обеспечения на автомобиле объекта обеспечения эко-показатель оценивается для идентификатора индивидуального путевого отрезка в соответствии со второй функцией. Результат оценки или информация дорожного движения, полученная согласно результату оценки, распознается навигационным устройством, установленным на автомобиле объекта обеспечения. Изобретение позволяет реализовать навигационную систему, которая может сделать вклад в направление подвижного транспортного средства к пункту назначения вдоль маршрута, подходящего с точки зрения экономии энергии. 3 н. и 9 з.п. ф-лы, 5 ил.
1. Навигационный сервер, который выполнен с возможностью обеспечения обработки, выполняемой навигационным устройством, установленным в подвижном транспортном средстве, служащем в качестве объекта обеспечения, на основе связи с упомянутым подвижным транспортным средством, содержащий:
элемент хранения первой функции, который выполнен с возможностью хранения первой функции, представляющей собой взаимосвязь между идентификатором транспортного средства для идентификации подвижного транспортного средства, рабочей информацией, представляющей рабочее состояние подвижного транспортного средства, и показателем энергии, представляющим величину энергии, потребленной подвижным транспортным средством,
элемент хранения второй функции, который выполнен с возможностью хранения второй функции, представляющей собой взаимосвязь между идентификатором транспортного средства, идентификатором путевого отрезка для идентификации индивидуального путевого отрезка и показателем энергии,
первый процессорный элемент обеспечения, который выполнен с возможностью
распознавания идентификатора транспортного средства второго измерительного подвижного транспортного средства, идентификатора путевого отрезка индивидуального путевого отрезка, где прошло второе измерительное транспортное средство, и рабочей информации, детектируемой измерительным устройством, установленным во втором измерительном подвижном транспортном средстве, на основе связи со вторым измерительным подвижным транспортным средством,
оценки показателя энергии для каждой комбинации идентификатора путевого отрезка и идентификатора подвижного транспортного средства согласно первой функции на основе результата распознавания и
установки или модификации второй функции на основе результата оценки, и
второй процессорный элемент обеспечения, который выполнен с возможностью
распознавания идентификатора транспортного средства подвижного транспортного средства, служащего в качестве объекта обеспечения,
оценки показателя энергии для идентификатора индивидуального путевого отрезка согласно второй функции на основе результата распознавания, и
предоставления возможности того, что навигационное устройство, установленное в подвижном транспортном средстве, служащем в качестве объекта обеспечения, распознает результат оценки или информацию дорожного движения, определенную согласно результату оценки, на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения.
2. Навигационный сервер по п.1, в котором второй процессорный элемент обеспечения
устанавливает один или множество маршрутов обеспечения или распознает навигационный маршрут для направления подвижного транспортного средства, служащего в качестве объекта обеспечения, от позиции отправления к позиции назначения на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения;
дополнительно распознает идентификатор путевого отрезка индивидуального путевого отрезка, который составляет часть или весь маршрут обеспечения или навигационный маршрут, или идентификатор путевого отрезка индивидуального путевого отрезка в области, которая включает в себя часть или весь маршрут обеспечения или навигационный маршрут, и
оценивает показатель энергии согласно второй функции на основе идентификатора путевого отрезка и идентификатора транспортного средства подвижного транспортного средства, служащего в качестве объекта обеспечения.
3. Навигационный сервер по п.2, в котором второй процессорный элемент обеспечения
подробно оценивает показатель энергии для каждого из множества маршрутов обеспечения или навигационных маршрутов на основе оцененного показателя энергии и
дает возможность навигационному устройству распознать идентификатор путевого отрезка индивидуального путевого отрезка, составляющего маршрут обеспечения или навигационный маршрут, имеющий пиковое значение подробной оценки в качестве информации дорожного движения.
4. Навигационный сервер по п.1, в котором первый процессорный элемент обеспечения
распознает информацию окружающей среды, представляющую собой состояние окружающей среды для каждой области, и
оценивает показатель энергии для индивидуального путевого отрезка согласно расширенной первой функции, представляющей собой взаимосвязь между идентификатором транспортного средства, идентификатором путевого отрезка, рабочей информацией, показателем энергии и информации окружающей среды, на основе информации окружающей среды, идентификатора транспортного средства второго измерительного подвижного транспортного средства, идентификатора путевого отрезка индивидуального путевого отрезка в каждой области и рабочей информации.
5. Навигационный сервер по п.1, в котором первый процессорный элемент обеспечения
распознает идентификатор транспортного средства первого измерительного подвижного транспортного средства, идентификатор путевого отрезка индивидуального путевого отрезка, где прошло первое измерительное подвижное транспортное средство, рабочую информацию первого измерительного подвижного транспортного средства и показатель энергии на основе связи с первым измерительным подвижным транспортным средством, и
устанавливает или модифицирует первую функцию на основе результата распознавания.
6. Навигационный сервер по п.5, дополнительно собранный с устройством, которое работает в различных режимах согласно величине потребления энергии первым измерительным подвижным транспортным средством, в котором первый процессорный элемент обеспечения распознает показатель, определенный согласно истории работы устройства, служащего в качестве объекта управления, на основе связи с первым измерительным подвижным транспортным средством в качестве показателя энергии.
7. Навигационный сервер по п.6, в котором
первое измерительное подвижное транспортное средство собрано с индикатором, который отображает, что величина потребления энергии первым измерительным подвижным транспортным средством находится в низком состоянии, или лампой, которая светится, когда величина потребления энергии находится в высоком состоянии, в качестве устройства объекта управления, и
первый процессорный элемент обеспечения распознает частоту отображения индикатора или частоту свечения лампы в качестве показателя энергии на основе связи с первым измерительным подвижным транспортным средством.
8. Навигационный сервер по п.1, в котором первый процессорный элемент обеспечения распознает скорость и ускорение второго измерительного подвижного транспортного средства или историю переходов позиций, детектируемую измерительным устройством, в качестве рабочей информации.
9. Навигационный сервер по п.8, в котором первый процессорный элемент обеспечения оценивает показатель энергии посредством использования линейной функции или по меньшей мере квадратичной функции, имеющей коэффициент в связи с идентификатором транспортного средства и скоростью и ускорением или скоростью и ускорением, определенными согласно истории переходов позиций, и скоростью или ускорением в качестве независимых переменных.
10. Навигационное устройство, которое выполнено с возможностью направления подвижного транспортного средства, служащего в качестве объекта обеспечения, на основе связи с навигационным сервером, содержащее:
первый процессорный элемент, который выполнен с возможностью распознавания позиции отправления и позиции назначения подвижного транспортного средства, служащего в качестве объекта обеспечения, и
второй процессорный элемент, который выполнен с возможностью
распознавания идентификатора путевого отрезка, который установлен навигационным сервером для идентификации индивидуального путевого отрезка, составляющего маршрут обеспечения, образуемый множеством путевых отрезков, соединяющих позицию отправления и позицию назначения, или индивидуального путевого отрезка части или всех путевых отрезков в области, содержащей маршрут обеспечения, и показателя энергии, который представляет собой величину энергии, потребленную подвижным транспортным средством, служащим в качестве объекта обеспечения, на основе связи с навигационным сервером, и
вывода навигационного маршрута, соединяющего позицию отправления и позицию назначения, на основе результата распознавания.
11. Навигационное устройство по п.10, в котором первый процессорный элемент устанавливает навигационный маршрут, и второй процессорный элемент позволяет навигационному серверу распознать идентификатор путевого отрезка индивидуального путевого отрезка, составляющего навигационный маршрут, который установлен первым процессорным элементом, на основе связи с навигационным сервером,
оценивает показатель энергии для индивидуального путевого отрезка, оцениваемый в навигационном сервере, и
подробно оценивает показатель энергии навигационного маршрута.
12. Навигационная система, которая состоит из навигационного устройства, которое установлено в подвижном транспортном средстве, служащем в качестве объекта обеспечения, и навигационного сервера, который выполнен с возможностью обеспечения обработки, выполняемой навигационным устройством, на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения, в которой:
навигационный сервер включает в себя
элемент хранения первой функции, который выполнен с возможностью хранения первой функции, представляющей собой взаимосвязь между идентификатором транспортного средства для идентификации подвижного транспортного средства, рабочей информацией, представляющей рабочее состояние подвижного транспортного средства, и показателем энергии, представляющим величину энергии, потребленной подвижным транспортным средством,
элемент хранения второй функции, который выполнен с возможностью хранения второй функции, представляющей собой взаимосвязь между идентификатором транспортного средства, идентификатором путевого отрезка для идентификации индивидуального путевого отрезка и показателем энергии,
первый процессорный элемент обеспечения, который выполнен с возможностью
распознавания идентификатора транспортного средства второго измерительного подвижного транспортного средства, идентификатора путевого отрезка индивидуального путевого отрезка, где прошло второе измерительное подвижное транспортное средство, и
рабочей информации, детектируемой измерительным устройством, установленным во втором измерительном подвижном транспортном средстве, на основе связи со вторым измерительным подвижным транспортным средством,
оценки показателя энергии для каждой комбинации идентификатора путевого отрезка и идентификатора транспортного средства согласно первой функции на основе результата распознавания и
установки или модификации второй функции на основе результата оценки, и
второй процессорный элемент обеспечения, который выполнен с возможностью
распознавания идентификатора транспортного средства подвижного транспортного средства, служащего в качестве объекта обеспечения,
оценки показателя энергии для идентификатора индивидуального путевого отрезка согласно второй функции на основе результата распознавания, и
предоставления возможности того, что навигационное устройство, установленное в подвижном транспортном средстве, служащем в качестве объекта обеспечения, распознает результат оценки или информацию дорожного движения, определенную согласно результату оценки, на основе связи с подвижным транспортным средством, служащим в качестве объекта обеспечения,
навигационное устройство включает в себя
первый процессорный элемент, который выполнен с возможностью распознавания позиции отправления и позиции назначения подвижного транспортного средства, служащего в качестве объекта обеспечения, и
второй процессорный элемент, который выполнен с возможностью
распознавания идентификатора путевого отрезка, который установлен навигационным сервером для идентификации индивидуального путевого отрезка, составляющего маршрут обеспечения, образуемый множеством путевых отрезков, соединяющих позицию отправления и позицию назначения, или индивидуального путевого отрезка части или всех путевых отрезков в области, содержащей маршрут обеспечения, и показателя энергии, который представляет собой величину энергии, потребленную подвижным транспортным средством, служащим в качестве объекта обеспечения, на основе связи с навигационным сервером, и
вывода навигационного маршрута, соединяющего позицию отправления и позицию назначения, на основе результата распознавания.
| JP 2002350152 А, 04.12.2002 | |||
| JP 2005163584 A, 23.06.2005 | |||
| JP 2003247845 A, 05.09.2003 | |||
| JP 2004077253 A, 11.03.2004 | |||
| НАВИГАЦИОННАЯ СИСТЕМА И СПОСОБ НАВИГАЦИИ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ УПРАВЛЕНИЯ МАРШРУТОМ НА СЛОЖНОМ ПЕРЕСЕЧЕНИИ ДОРОГ | 2003 |
|
RU2270480C2 |

