Изобретение относится к автоматическим средствам управления судами, а также к решениям по мониторингу показателей или эксплуатационных параметров судов во время работы, в частности, для контролирования работы судов, например, для мониторинга их скорости, курса с использованием моделей или симуляции, например, статистических или стохастических моделей, и может быть использовано при проведении опытов по внедрению технологий безэкипажного (автономного) судоходства, в том числе в реальной обстановке.
В области судовождения исследование проблем идентификации и управления судами сопряжено с обширным объемом данных, получаемых в результате комплекса маневров таких, например, как «зигзаг», «спираль» и т.д., который, зачастую, оказывается недоступен для исследователя ввиду дороговизны эксплуатации судна и неготовности судовладельца или фрахтователя предоставлять судно для научных исследований. Такие исследования целесообразно проводить на малогабаритных автоматически и дистанционно управляемых морских подвижных объектах. Возникает необходимость создания малогабаритных испытательных судов с соблюдением масштабных коэффициентов производственного судна и его основных динамических и кинематических параметров для дальнейших исследований алгоритмов идентификации и управления, с автономным береговым обеспечением управления.
Известно по патенту РФ №153610 на полезную модель «Исследовательская модель судна», МПК В63В 9/02, G01M 10/00, опубл. 27.07.2015. Исследовательская модель предназначена для исследования параметров и характеристик судов. Техническим результатом этого решения является исключение трудно учитываемого влияния эластичной обшивки, изолирующей подвижные части модели от воды, на точность измерений параметров модели при исследованиях и тем самым повышается точность измерений. Технический результат достигается тем, что в разработанном решении используются отдельные плавучие отсеки, соединенные между собой упругими элементами. Данная модель решает частную задачу - исключение трудно учитываемого влияния эластичной обшивки.
Известно по патенту РФ на полезную модель №153109, МПК В63В 38/00, опубл. 10.07.2015, «Научно-исследовательское судно с бортовым центром управления научными исследованиями». Это судно включает бортовой и береговой центры управления и является, по сути, комплексом, обеспечивающим автоматизированный сбор, обработку и отображения научной информации, информацией между судами, береговыми научными институтами, центрами мониторинга и ситуационным центром, однако, не предназначено для решения задачи заявляемой полезной модели.
Известно по патенту РФ на полезную модель №188836 «Безэкипажный управляемый катер», МПК B63G 7/00, В63В 21/24, опубл. 24.04.2019. Это решение относится к области судостроения, а именно, к беспилотным плавсредствам, предназначенным преимущественно для выполнения поисковых и исследовательских задач. Технический результат от использования данной полезной модели заключается в возможности экстренной постановки судна на якорь при отключении электропитания. Безэкипажный управляемый катер выполнен в виде корпуса с дизель-электрическим комплексом, системой дистанционного управления, наблюдения, сбора и хранения информации. Данная модель решает частную задачу - экстренная постановка судна на якорь при отключении электропитания.
Известно по патенту РФ на полезную модель №172135, МПК G09B 9/06, опубл. 29.06.2017 «Система имитационного моделирования управления поисково-спасательными операциями с использованием морских роботизированных технологических комплексов». Полезная модель относится к информационным системам моделирования и может быть использована для исследования управления поисково-спасательными операциями с использованием морских роботизированных технологических комплексов.
Известно по патенту РФ на полезную модель №181258, МПК G06F 15/18, опубл.06.07.2018 «Экспертная система поддержки принятия решений по управлению морским роботизированным технологическим комплексом». Эта система может быть использована для принятия решений по управлению морским роботизированным технологическим комплексом. Устройство включает подсистемы управления, обмена с источниками данных, обработки и анализа, отображения информации, банк данных, подсистему обмена данными. Эта система, как и предыдущая, позволяют решать многие задачи, в том числе и по преодолению нештатных ситуаций, однако не предназначены для обеспечения автоматической проводки надводных объектов.
Известно по патенту РФ на полезную модель №108667, МПК G06F 17/00, опубл. 20.09.2011 «Аппаратно-программный комплекс для обеспечения выдачи рекомендаций судоводителям и операторам систем управления движением судов для минимизации ущерба при неизбежности столкновения объектов морской деятельности». Этот комплекс включает соединенные средствами связи устройство ввода-вывода, устройство хранения данных, устройство обработки данных и устройство визуализации. Отличается тем, что устройство обработки данных содержит соединенные средствами связи устройство синтеза виртуального состояния объекта морской деятельности и устройство выбора оптимального варианта решения. Комплекс прогнозирует возможность столкновения судов, но не предназначен для точной проводки судна.
Известно по патенту РФ на изобретение №2741669, МПК В63Н 25/04, опубл. 28.01.2021 «Система координированного управления движением судна в режимах автоматического и дистанционного управления». Система координированного управления движением судна в режимах автоматического и дистанционного управления содержит блок адаптации управления и стабилизации на малых ходах, блок управления и стабилизации на малых ходах, блок адаптации управления и стабилизации на скорости хода более четырех узлов, блок управления и стабилизации на скорости хода более четырех узлов, блок обработки навигационной информации, блок моделирования движения судна на малых ходах, блок моделирования движения судна на скорости хода более четырех узлов, блок контроля и управления, блок измерителей параметров движения, блок объектов управления, автономную навигационную систему, обзорно-поисковую систему и береговой пост, соединенные определенным образом. Обеспечивается расширение функциональных возможностей координированного управления движением судна во всем диапазоне его скоростей. Система сложна для проведения опытов по управлению судном.
Известно по патенту РФ на полезную модель №98953, МПК В63В 39/00, опубл. 04.08.2020 «Устройство определения параметров движения судна». Данная полезная модель относится к судостроению, а именно, к экспериментальным средствам определения параметров движения судов в различных метеорологических условиях, и может быть использована при маневренных и ходовых испытаниях надводных судов, в том числе, безэкипажных и автономных. Предлагаемая полезная модель решает проблему повышения точности определения параметров движения судна при проведении ходовых и маневренных испытаний путем учета и регистрации влияния метеорологических факторов. Устройство содержит антенный сегмент, соединенный с мультиантенной приемной аппаратурой спутниковых навигационных систем, инерциальный измерительный сегмент, первый вход которого соединен с выходом мультиантенной приемной аппаратуры спутниковых навигационных систем, второй вход - с выходом управляющего компьютера, а выход - с регистрирующей аппаратурой. Дополнительно в состав устройства включена метеостанция, соединенная с третьим входом инерциального измерительного сегмента. Эта полезная модель решает задачу определения параметров движения судна в различных метеорологических условиях. Недостаток этого устройства обусловлен сложной конструкцией.
В качестве прототипа принят патент РФ на изобретение №2 760 823 МПК В63В 79/00 опубл. 30.11.2021 «Опытовый морской модульный комплекс». Изобретение относится к автоматическим средствам управления судами, а также к решениям по мониторингу показателей или эксплуатационных параметров судов во время работы, в частности для контролирования работы судов, например для мониторинга их скорости, курса с использованием моделей или симуляции, например статистических или стохастических моделей, и может быть использовано при проведении опытов по внедрению технологий безэкипажного (автономного) судоходства, в том числе в реальной обстановке. Технической задачей изобретения является упрощение и удешевление исследования проблем идентификации и управления судами с береговым обеспечением дистанционного управления. Расположенный на береговом модуле авторулевой вырабатывает управляющие воздействия на средства управления малогабаритного опытового судна на основании данных, обработанных с использованием компьютера высокой, по сравнению с микроконтроллером, установленным на борту судна, производительности, что обеспечивает точность, надежность и быстроту автоматического управления судном по траектории. Размещение авторулевого в составе берегового модуля обеспечивает более быстрое формирование более точных управляющих воздействий на средства управления малогабаритного опытового судна. Изобретение не решает задачи управления судном, оснащенным азиподами, подруливающими устройствами и системой динамического позиционирования.
Технической задачей изобретения является создание технического комплекса, углубляющего, упрощающего и удешевляющего исследования проблем идентификации и управления судами, оборудованными системами динамического позиционирования с береговым и автономным обеспечением автоматического управления.
Для достижения поставленной технической задачи предлагается Навигационный испытательный комплекс, включающий надводный подвижный сегмент, выполненный в виде малогабаритного опытового судна, с размещенными на борту азиподами, подруливающими устройствами, элементами питания, датчиками, микроконтроллерами с программным обеспечением в виде системы сбора и обмена информацией, устройствами связи и береговой мобильный сегмент, который содержит систему индикации, картографии и дистанционного ручного и автоматического управления подвижным сегментом на базе портативного компьютера с устройством связи,
ОТЛИЧАЮЩИЙСЯ тем, что система управления, картографии и индикации, являющаяся программным обеспечением берегового сегмента, разработанным на платформе MATLAB, включает блоки сбора, хранения, фильтрации и анализа данных, графический интерфейс, блок построения и идентификации математической модели движения судна, блок задания траектории движения, блок ручного управления азиподами и подруливающими устройствами синхронно и по отдельности, блок корректуры компаса и GPS, блок автоматического управления, формирующий управляющие воздействия на средства управления надводным подвижным сегментом,
а на борту малогабаритного опытового судна размещены система сбора и обмена кинематической, навигационной и управляющей информации, которые содержатся в микроконтроллере Arduino как программное обеспечение, разработанное на платформе Arduino (С++), устройство связи, комплекс датчиков: гироскопический датчик и акселерометр, датчик магнитного поля Земли, приемник GPS, при этом надводный подвижный и береговой сегменты обмениваются информацией с заданной частотой посредством соответствующих устройств связи, которые выполнены с возможностью использования частот Wi-Fi и УКВ для обмена данными по протоколу TCP-IP,
ОТЛИЧАЮЩИЙСЯ тем, что управление программными платформами, расположенными на надводном подвижном и береговом сегментах, осуществляется посредством Программного комплекса «Интерфейс индикации и управления автономным морским подвижным объектом с двумя азиподами и носовым подруливающим устройством», зарегистрированного в ФИПСе, №2022610657 RU от 13.01.2022 г. Правообладатель: Федеральное государственное бюджетное образовательное учреждение высшего образования «Государственный морской университет имени адмирала Ф.Ф. Ушакова» (RU), авторы: Бурылин Ярослав Васильевич (RU), Боран-Кешишьян Анастас Леонидович (RU), Кондратьев Сергей Иванович (RU),
ОТЛИЧАЮЩИЙСЯ тем, что малогабаритное опытовое судно имеет длину 2500 мм, ширину 400 мм, высоту борта 400 мм, осадку 150 мм, в качестве средств управления использует два кормовых азипода и два носовых подруливающих устройства, способно функционировать в режиме динамического позиционирования.
Технический результат заключается в том, что береговой сегмент комплекса оснащен таким программным обеспечением, а подвижный сегмент комплекса оснащен такими средствами управления, что возникает возможность осуществлять управление судном по концепции от причала до причала, подразумевающей автоматическое управление в режимах швартовки-отшвартовки, удержания позиции и следования по заданной траектории.
Технический результат достигается оснащением подвижного сегмента испытательного комплекса средствами управления, присущими судам с динамическим позиционированием, оснащением берегового сегмента программным обеспечением, обеспечивающим возможность автоматически и дистанционно управлять такими типами подвижных морских объектов, в том числе от причала до причала.
Сущность изобретения заключается в следующем.
Конструктивное решение испытательного комплекса в виде надводного и берегового сегментов расширяет его функциональные и исследовательские возможности.
Создание малогабаритного опытового судна с интерфейсом позволяет собирать, обрабатывать, анализировать кинематическую и навигационную информацию по судну и использовать полученные данные для автоматического управления судном по траектории, автоматического удержания судна в позиции, автоматической швартовки-отшвартовки и ручного управления судном, строить математические модели движения судна и синтезировать системы автоматического управления судном, в том числе в режиме динамического позиционирования.
Протокол обмена данными между береговым и подвижным сегментами построен так, что производится передача кинематических и навигационных данных по судну на береговой сегмент, а управляющих сигналов с берегового на подвижный. Интерфейс содержит алгоритм фильтрации кинематических данных и каскадный ПИД - регулятор, вырабатывающий управляющие воздействия на средства управления судном.
Размещение авторулевого в составе системы индикации и дистанционного управления на береговом сегменте обеспечивает формирование управляющих воздействий на средства управления малогабаритного опытового судна на основании данных, обработанных с использованием компьютера высокой, по сравнению с микроконтроллером, установленном на борту судна, мощности, что обеспечивает точность, надежность и быстроту автоматического управления судном по траектории.
Система сбора кинематической и навигационной информации, содержащая микроконтроллер Arduino с программным обеспечением, разработанным на платформе Arduino (С++), обеспечивает работу датчиков: GPS, гироакселерометра, магнитного поля Земли, частоты вращения вала и углов перекладки азиподов, сегмента Wi-Fi.
Использование блока Wi-Fi дает возможность использовать разнообразные мобильные устройства без дополнительных затрат на комплектацию берегового сегмента устройствами связи; позволяет использовать защищенный протокол передачи данных.
Опытовый морской сегментный комплекс позволяет:
- отрабатывать принципы построения математических моделей судов, оснащенных системами динамического позиционирования на основе движения реального морского подвижного объекта, не задействуя при этом грузовые или пассажирские суда, существенно сокращая стоимость научных исследований;
- производить подготовку дистанционных операторов судна для целей е-навигации;
- производить синтез, отладку и тестирование автоматических систем управления морскими судами, в том числе с системами динамического позиционирования;
- сократить расходы на микроконтроллер подвижного блока за счет того, что обработка информации и работа авторулевого производится мощностями берегового сегмента, благодаря чему точность, скорость и надежность вычислений управляющих воздействий возрастает;
- подключение посредством протоколов TCP-IP является защищенным и может давать гарантию предотвращения перехвата или помех управления от посторонних радиосигналов;
- дублирование систем связи посредством частот УКВ и Wi-Fi позволяет обеспечить отказоустойчивость и бесперебойность каналов управления судном.
Выполнение малогабаритного опытового судна с длиной 2,5 м, шириной 0,4 м, высотой борта 0,4 м и осадкой 0,15 м обеспечивает максимальное достижение технического результата.
Сущность изобретения поясняется графическими материалами, на которых изображено:
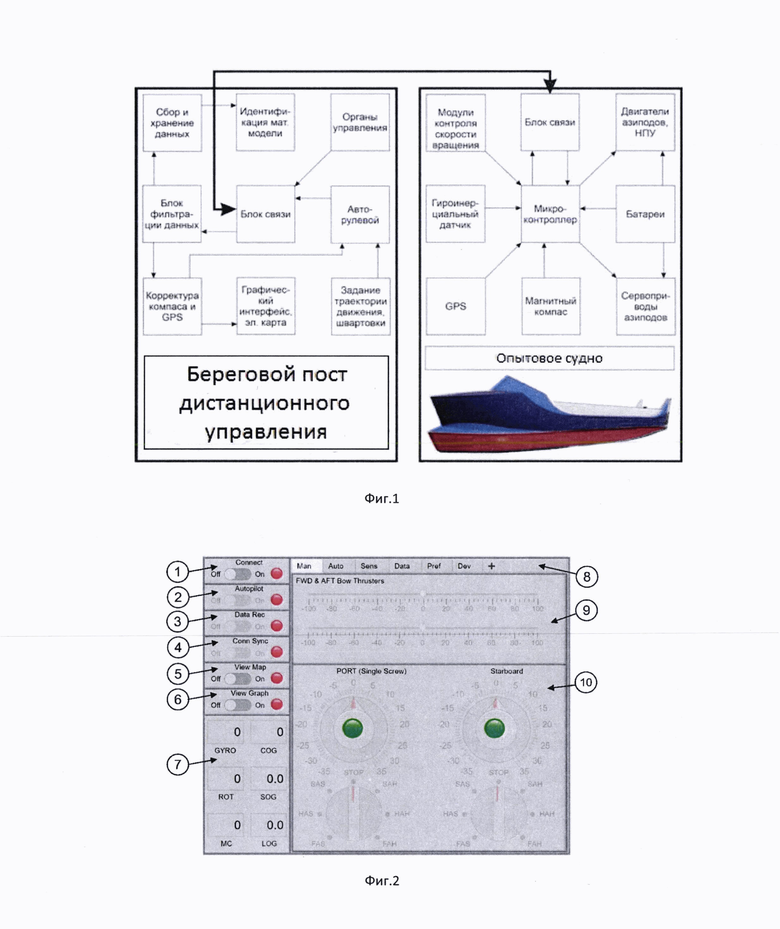
Фиг. 1 - Состав НИК.
Фиг. 2 - Интерфейс органов ручного дистанционного управления;
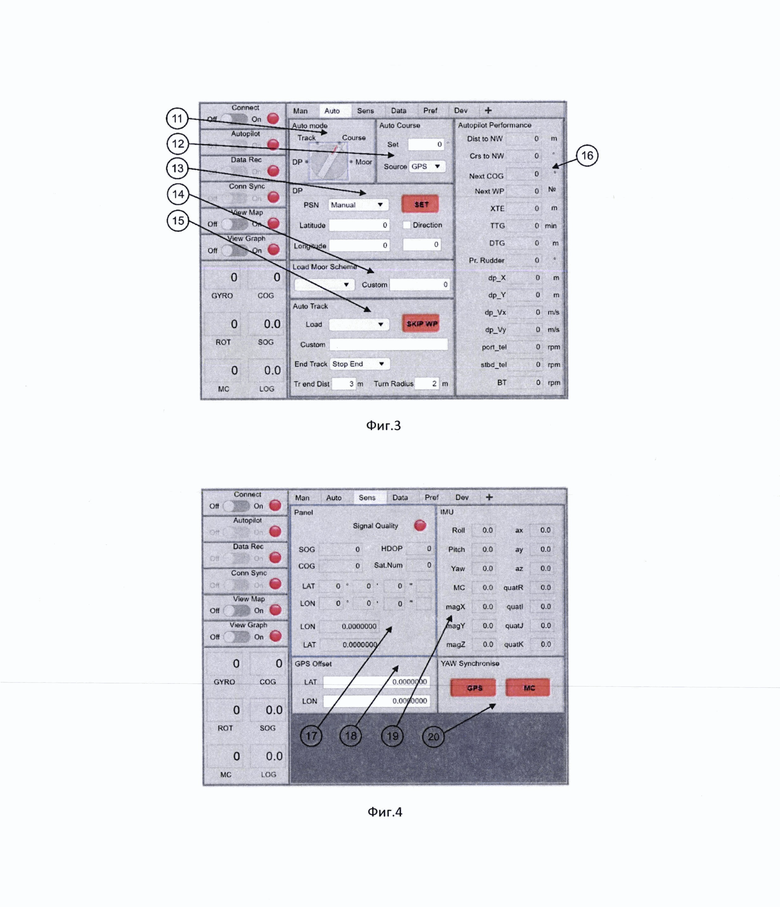
Фиг. 3 - Интерфейс параметров авторулевого;
Фиг. 4 - Интерфейс настроек и параметров датчиков;
Фиг. 5 - Интерфейс расширенных настроек и системной информации;
Фиг. 6 - Интерфейс настроек авторулевого и графического отображения информации;
Фиг. 7 - Инструмент устранения магнитной девиации;
Фиг. 8 - Информационно картографический интерфейс.
Предложенный навигационный испытательный комплекс (НИК) построен следующим образом. Береговой сегмент содержит:
• блок сбора и хранения данных,
• устройство связи Wi-Fi,
• портативный компьютер с установленным интерфейсом индикации, картографии и управления подвижным сегментом,
• блок идентификации математической модели движения судна,
• блоки задания и ввода траектории движения, удержания и швартовки судна и
• органов ручного управления движением судна,
• блок фильтрации кинематических данных по судну,
• блок ввода корректуры в показания магнитного компаса и GPS,
• авторулевой для различных режимов движения. Надводный подвижный сегмент включает:
• малогабаритное опытовое судно, на борту которого размещены:
• микроконтроллер Arduino с программным обеспечением, разработанным для взаимодействия с подвижным сегментом,
• устройство связи Wi-Fi, устройство связи УКВ;
• комплекс датчиков:
- гироскопический датчик с акселерометром,
- датчик магнитного поля Земли,
- приемник GPS,
• модули контроля скорости вращения двигателей.
• двигатели азиподов и подруливающих устройств,
• батареи для двигателей и электронного оборудования,
• сервоприводы азиподов.
Предложенный НИК работает следующим образом.
После подачи питания на системы подвижного сегмента начинается опрос датчиков и сбор кинематической информации по судну, навигационная информация, предоставляемая датчиком GPS, становится доступна через несколько минут, после определения места судна. Устройство связи подвижного сегмента создает точку доступа Wi-Fi с функциями сервера защищенного подключения с логином и паролем для входа.
После подключения берегового сегмента через интерфейс оператора посредством протоколов TCP-IP к серверу в качестве клиента начинается обмен данными между береговым и подвижным сегментами. На графических и цифровых табло интерфейса берегового сегмента отображаются преобразованные полученные с подвижного сегмента доступные кинематические и навигационные параметры по судну, активируется панель ручного управления судном.
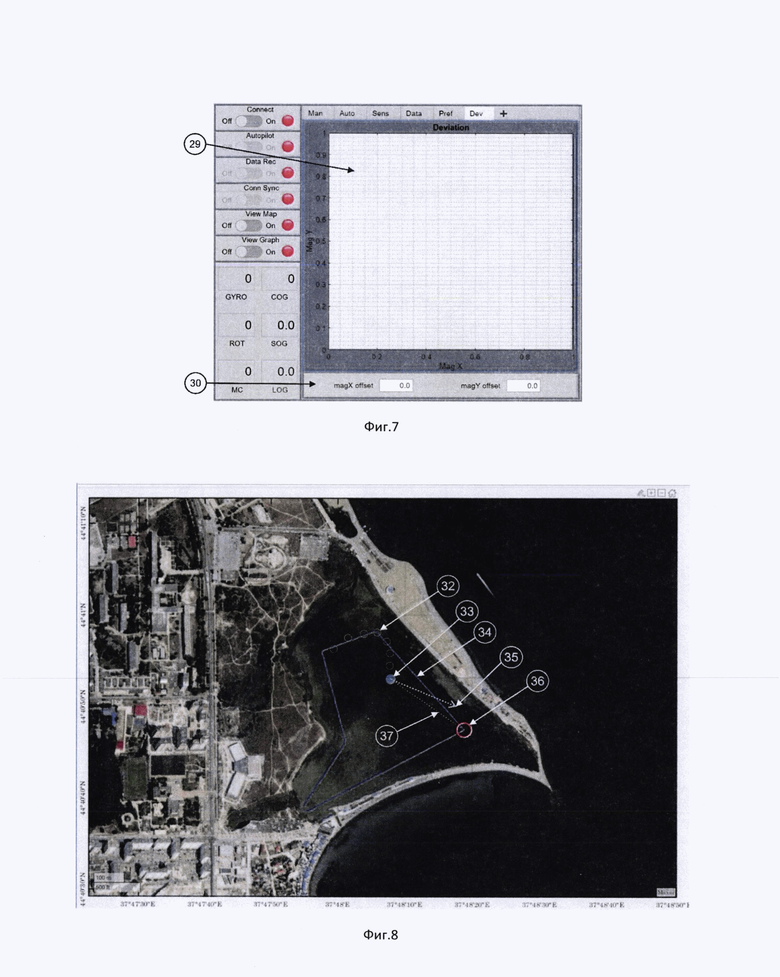
Оператор может совершить циркуляцию в ручном режиме для построения девиационной картины на табло устранения девиации 29 и на ее основании скорректировать погрешность от влияния магнитного склонения на датчик магнитного поля Земли используя поле ввода 30. Оператор может включить тумблером «Data Rec» сбор всей доступной информации для ее дальнейшего анализа, в том числе построения математических моделей движения судна. Оператор может синхронизировать данные гироскопического датчика с магнитным или GPS для получения гирокомпасного курса из угла рысканья судна.
После задания траектории автоматического движения и переключения тумблера автопилота в автоматический режим проводки судна авторулевой начинает вырабатывать управляющие воздействия на судно в виде углов перекладки азиподов и частоты вращения винтов азиподов и подруливающих устройств в зависимости от кинематических и навигационных данных по судну, а именно его продольной и угловой скоростей, курса, положения относительно заданной траектории движения и заданных коэффициентов ПИД-регулятора. Данные по управляющим воздействиям передаются на подвижный сегмент и преобразуются контроллером в электрические сигналы на сервоприводы азиподов, электродвигатели азиподов и подруливающих устройств.
Судно начинает маневрировать согласно заданной траектории, швартовной схемы или позиции. Оператор видит на вкладке картографической информации как движется судно относительно заданной траектории, видит характер автоматического управления и может настраивать регулятор посредством ввода коэффициентов в режиме реального времени. Выйдя на заданное расстояние до конечной точки траектории судно останавливается, ожидая дальнейших действий оператора.
Интерфейс программного обеспечения берегового сегмента комплекса устроен следующим образом.
На фиг.2-7 представлено графическое отображение предлагаемого интерфейса, в операционной системе Windows. Произведена сквозная нумерация выносками ключевых панелей управления и индикации, описание каждой из которых представлено ниже.
На фиг.2 показано содержимое закладки «Man» панели закладок интерфейса.
Тумблер активации подключения платформы, на которой установлен интерфейс к судну через протокол TCP-IP (№1, фиг.2). При успешном подключении индикатор меняет цвет на зеленый.
Тумблер переключения режимов управления с ручного на автоматическое и обратно (№2, фиг.2). При включенном режиме «Autopilot» индикатор меняет цвет на зеленый.
Тумблер включения и отключения записи всех доступных для измерения данных по судну, интерфейсу и авторулевому (№3, фиг.2). При включенном режиме «Data Rec» индикатор меняет цвет на зеленый.
Тумблер включающий и отключающий синхронное управление движительно-рулевыми комплексами (ДРК) судна, при наличии более одного такого комплекса (№4, фиг.2). При включенном режиме «Сопл Sync» индикатор меняет цвет на зеленый.
Тумблер включения отображения информационно картографического интерфейса с элементами навигационных характеристик, условий и параметров движения судна по заданным условиям (№5, фиг.2).
Тумблер включения отображения графиков со значениями кинематических параметров судна в реальном времени (№6, фиг.2). Выбрать конкретный кинематический параметр для отображения можно с помощью панели №28, фиг.6.
Панель индикации основных кинематических параметров судна (№7, фиг.2):
- LOG - значение пройденного расстояния в метрах;
- ROT - угловая скорость судна в градусах в минуту;
- МС - значение магнитного курса в градусах;
- SOG - значение скорости относительно грунта в метрах в секунду;
- COG - значение истинного курса в градусах;
- GYRO - значение гирокомпасного курса в градусах.
Панель закладок интерфейса (выноска №8, фиг.2). Содержит 6 закладок: «Мап», «Auto», «Sens», «Data» «Pref» «Dev».
• В закладке «Мап» находятся органы управления движением судна.
• В закладке «Auto» находятся органы управления авторулевым судна.
• В закладке «Sens» находятся панели отображения числовой информации датчиков судна.
• В закладке «Data» находятся панели управления и индикации системной информации по интерфейсу.
• В закладке «Pref» находятся панели расширенных настроек интерфейса.
• В закладке «Pref» находятся поле графического отображения данных с датчика магнитного поля Земли и два поля ввода корректуры для устранения магнитной девиации магнитного компаса.
Панель ручного дистанционного управления носовыми подруливающими устройствами до двух штук (выноска №9, фиг.2). Включает в себя два «ползунка» с диапазонами значений от -100 до 100 процентов для задания эффективной мощности работы подруливающих устройств.
Панель ручного управления левым или единственным ДРК судна и правым ДРК судна (№10, фиг.2). Включает поворотные регуляторы «knob» с диапазоном хода от -135 до 135 градусов для управления положением пера руля. Поворотный тумблер «discrete knob» со значениями: FAS, HAS, SAS, STOP, SAH, HAH, FAH, соответствующими режимам работы двигателя судна как: полный задний ход, средний задний ход, малый задний ход, стоп, полный передний ход, средний передний ход, малый передний ход. В случае несоответствия задаваемого значения положения пера руля отрабатываемому на судне - индикатор меняет цвет с зеленого на красный. В случае автоматического управления поворотный регулятор переходит в режим индикации и показывает значение отрабатываемого на судне значения пера руля. В случае несовпадения заданного авторулевым программного значения положения пера руля с исполняемым - цвет индикатора меняется на красный.
Переключатель режимов работы авторулевого (№11, фиг.3):
• «Track» - Управление по траектории, заданной географическими координатами.
• «Course» - Управление по заданному курсу.
• «DP» - Управление в режиме динамического позиционирования.
• «Moor» - Управление судном в режиме швартовки.
Панель (№12, фиг.3) задания значения курса для удерживания судном и указанием источника данных по курсу (GPS, Гирокомпас, Магнитный компас).
Панель (№13, фиг.3) задания координат позиции для удерживания судном в режиме динамического позиционирования (DP). Панель содержит выпадающий список для указания источника координат (текущая позиция судна по GPS, позиция курсора на карте, ручной ввод), поля для ввода координат вручную. Поле «флажок» для указания необходимости удерживания направления судна. Поле ввода заданного направления судна. Кнопку «Set» по нажатию которой судно начинает управляться в режиме DP по заданным координатам и ориентации.
Панель (№13, фиг.3) выбора или задания схемы швартовки судна. Содержит выпадающий список предустановленных вариантов швартовки и поле «Custom» для ввода схемы швартовки вручную. Ручное задания схемы швартовки подразумевает указание координат центра подходного круга, координат желаемого положения судна у причала и ориентацию судна у причала.
Панель (№15, фиг.3) задания параметров управления по заданной траектории содержит выпадающий список «Load» предустановленных маршрутов, поле «Custom» для ручного ввода координат поворотных точек маршрута, выпадающий список «Track end» с вариантами завершения маршрута:
• «Stop End» - остановка судна по достижении конечной точки маршрута.
• «DP End» - Удерживание судна в режиме DP в конечной точке маршрута.
• «Moor End» - по достижении конечной точки судна переключается в режим швартовки с предустановленными ее параметрами в панели №13, причем конечная точка маршрута должна совпадать с координатами подходного поворотного круга.
Панель также содержит поле ввода «Tr end dist» значения дистанции в метрах до конечной точки, по достижении которой, судно считается выполнившим маршрут. Поле ввода «Turn Radius» значения радиуса циркуляции судна.
Панель индикации основных параметров автоматического управления судном (№16, фиг.4):
- Dist to NW - дистанция до следующей путевой точки траектории в метрах;
- Crs to NW - курс на следующую путевую точку траектории в градусах;
- Next COG - курс на следующем плече траектории в градусах;
- Next WP - номер следующей путевой точки;
- ХТЕ - отклонение положения судна от текущего плеча траектории в метрах;
- DTG - дистанция по заданной траектории от положения судна до последней точки заданной траектории в метрах;
- Pr. Rudder - программное значение положения пера руля судна, выработанное авторулевым в режимах движения по курсу и по траектории, когда движение происходит при одном ДРК или синхронизированной работе двух ДРК.
- Кнопка «SKIP WP» позволяет в ручном режиме переключить следующую путевую точку на одну вперед.
- dp_X - поперечная дистанция до заданной точки в режиме DP.
- dp_Y - продольная дистанция до заданной точки в режиме DP.
- dp_Vx- поперечная скорость в режиме DP.
- dp_Vy - продольная скорость в режиме DP.
- port tel- заданное значение оборотов левого азипода.
- stbd tel - заданное значение оборотов правого азипода.
- ВТ - заданное значение оборотов двигателя носового подруливающего устройства.
На фиг.3 показано содержимое закладки «Sens» панели закладок интерфейса.
Панель индикации данных, получаемых с приемопередатчика GPS и его состояния (№17, фиг.4), на которой отображаются следующие данные:
• HDOP - Horizontal Dilution of Precision, снижение точности получаемых координат местоположения судна в горизонтальной плоскости. В зависимости от значения индикатор «Signal Quality» меняет свой цвет на красный, желтый, синий, что соответствует неудовлетворительному качеству точности, удовлетворительному и отличному;
• Sat. Num - количество спутников на основании данных с которых производится расчет координат местоположения;
• LAT - принимаемая широта судна в градусах и градусах -минутах - секундах;
• LON - принимаемая долгота судна в градусах и градусах -минутах - секундах;
Панель ввода корректуры в получаемые данные координат местоположения судна в градусах (№18, фиг.4).
Панель индикации данных получаемых с сегмента, содержащего гироскопический, инерционный датчики и датчик магнитного поля Земли (№19, фиг.4). В дополнение к №6 и №13 отображаются данные:
• ах, ay, az - продольные ускорения по соответствующим осям. При этом ось «х» сонаправлена с продольной осью судна от кормы в бак, ось «у» направлена влево от диаметральной плоскости судна ось «z» направлена вверх;
• magX, magY, magZ - составляющие магнитного поля Земли по соответствующим осям. Оси направлены как в №18.
• quatR, quatl, quaU, quatK - составляющие кватерниона, описывающего ориентацию судна в пространстве.
Панель инициализирующей синхронизации значения угла рысканья судна со значениями магнитного либо истинного (получаемого с GPS) курсов судна для получения гирокомпасного курса (№20, фиг.4).
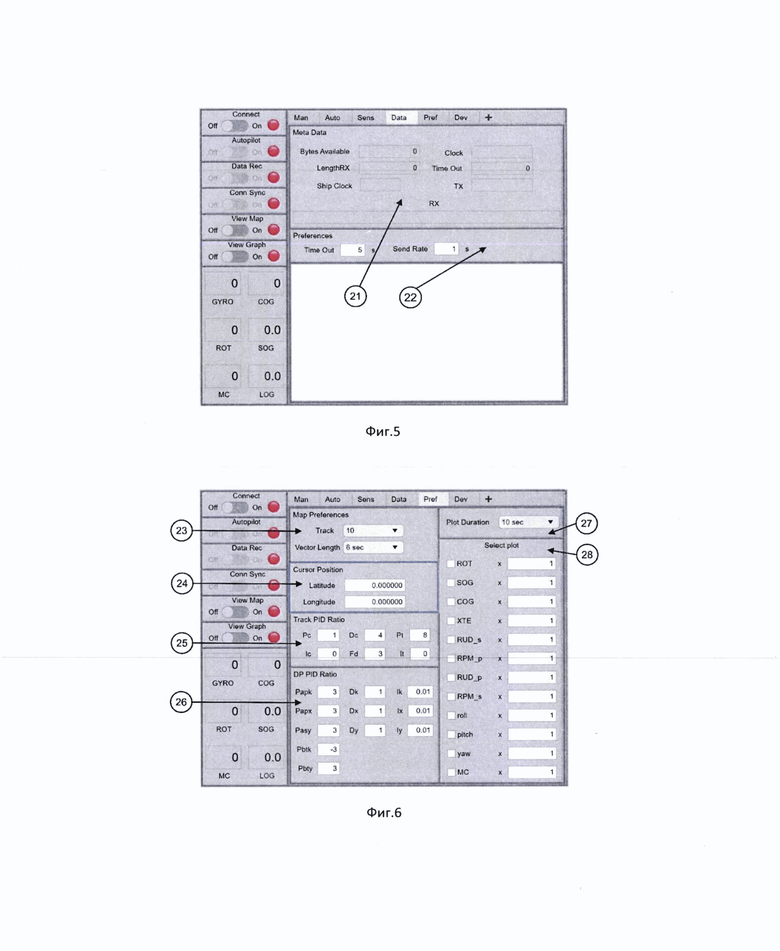
Панель индикации данных связи «Data» (№21, фиг.5) содержит следующую информациию:
- Bytes available - Количество принятых данных в буфере в байтах;
- LengthRX - длина принятой строки данных в количестве символов;
- ТХ - строка передаваемых на судно данных;
- Clock - продолжительность бесперебойного соединения в минутах - секундах;
- Time Out - время отсутствия ответа от сервера в секундах;
- String RX - принимаемая с судна строка данных.
Панель расширенных настроек связи «Preferences» содержит следующие поля ввода:
- Time Out - время отсутствия ответа от сервера после которого происходит переоткрытие соединения;
- Send Rate - частота отправки данных на судно в секунду. Панель отображения системной информации (№31, фиг.4) который
может отображать следующие сообщения в зависимости от процессов происходящих в интерфейсе:
• «Buffer Overflow: Flush» - очистка буфера стэка вследствие переполнения;
• «REOPEN TCPIP: Server TimeOut» - переоткрытие соединения вследствие отсутствия ответа от сервера;
• «REOPEN TCPIP: Closed by Server» - переоткрытие соединения сервером;
• «SELECT TRACK» - ошибка возникает при включении авторулевого без выбранной траектории движения;
• «INPUT TRACK)) - ошибка возникает при включении авторулевого без заданной вручную траектории движения при выбранном пункте «Custom)) в выпадающем списке загружаемых траекторий;
Панель установок отображаемой на карте информации (№23, фиг.6). Выпадающий список для значений «Duration» позволяет менять количество отображаемых точек исполняемой траектории в зависимости от времени. Может принимать значения: 10, 50, 100 секунд. Выпадающий список для значений «Vector Length)) позволяет менять длину отображаемого вектора
судна в зависимости от времени. Может принимать значения, соответствующие расстоянию, которое пройдет судно за: 6, 12, 30, 60 секунд. Панель, отображения координат позиции курсора на карте (№24, фиг.6).
Панель «Тгаск PID Ratio» ввода значений коэффициентов ПИД регулятора по траектории и курсу (№25, фиг.6). Содержит следующие коэффициенты:
- Рс, Ic, Dc - коэффициенты пропорционального, интегрального и дифференциального членов регулятора по курсу соответственно;
- Pt, It, - коэффициенты пропорционального, интегрального и дифференциального членов регулятора по траектории соответственно;
- Fd - параметр фильтра скользящего среднего угловой скорости судна.
Панель «Тгаск PID Ratio» ввода значений коэффициентов ПИД регулятора в режиме DP (№26, фиг.6). Содержит следующие коэффициенты:
- Papk, Рарх, Pasy, Pbtk, Pbty, Dk, Dx, Dy Ik, Ix, Iy - коэффициенты пропорционального, интегрального и дифференциального членов регуляторов по продольной и поперечной составляющей режима DP.
Панель (№27, фиг.6) с выпадающим списком «Duration», который позволяет задать промежуток времени, данные за который будут отображены в поле графиков кинематических параметров. Может принимать следующие значения: 10, 50, 100, 500, 1000 секунд.
Панель (№28, фиг.6) выбора посредством установки соответствующих флажков кинематических параметров судна, отображаемых на поле графиков кинематических параметров. Значениям каждого параметра можно присвоить индивидуальный масштаб отображения.
Графическое поле отображения девиационной картины датчика магнитного поля Земли в миллитесла (№29, фиг.7). Предназначено для определения и устранения влияния магнитного склонения.
Панель ввода корректуры в значения горизонтальных составляющих магнитного поля Земли для компенсации локального магнитного склонения, в миллитесла (№30, фиг.7).
На фиг.8 показано содержимое информационно картографического интерфейса, представляющего из себя фотографическое отображение местности со спутника либо схематическую карту местности с привязкой к географическим координатам, дополненной навигационной информацией в графическом виде.
Информационно картографический интерфейс начинает отображаться при включении тумблера №5 и содержит следующую навигационную и кинематическую информацию по судну в графическом виде:
• Предыдущие положения судна (№32);
• Текущее положение судна (№33);
• Заданная траектория движения судна (№34);
• Вектор скорости судна относительно грунта (№35);
• Указатель следующей поворотной точки (№36); Указатель направления на следующую путевую точку (№37).
В случае выхода судна из области покрытия сигнала Wi-Fi управление переключается на канал УКВ связи.
ПРИМЕР ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ НИК
В схему НИК входят следующие основные технические элементы:
- Микроконтроллер Arduino ATmega 2560 предназначен для управления работой датчиков и сегмента связи, сбора данных от датчиков, обработки данных от датчиков и передачи их на сегмент связи, приема данных по управляющим воздействиям через сегмент связи, передачи данных по управляющим воздействиям на реле управления электромотором;
- Приемопередатчик на частотах Wi-Fi ESP8266 предназначен для дистанционного обмена данными между оператором и судном и работает в режиме сервера сети, в свою очередь сегмент оператора судна работает в качестве клиента. Обеспечивает доступ клиентов посредством аутентификации в сети;
- Сервопривод MG996R предназначен для подачи крутящего момента на баллер азипода и обеспечивает его ход до 150 градусов на каждый борт судна;
- Батареи литий-полимерного типа для обеспечения электропитания системы. Батарея 7,4 В предназначена для питания микроконтроллера, датчиков и сервопривода руля, батарея на 11,1 В предназначена для питания электромотора. Судно дополнительно обеспечено устройством измерения остаточного заряда батарей;
- Гироскопический, инерционный, магнитный датчик BNO080, предназначен для измерения продольных и угловых ускорений по трем координатным осям и составляющих магнитного поля Земли по координатным осям, вырабатывает значения угловых скоростей судна по осям координат, значения вещественных коэффициентов кватерниона ориентации судна;
- Датчик GPS GY-NE06MV2, предназначен для приема текущих географических координат местоположения судна, показателя HDOP, количества видимых навигационных спутников, курса и скорости судна относительно грунта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
Изобретение относится к автоматическим средствам управления судами, а также к решениям по мониторингу показателей или эксплуатационных параметров судов во время работы, в частности для контролирования работы судов, например для мониторинга их скорости, курса с использованием моделей или симуляции, например, статистических или стохастических моделей, и может быть использовано при проведении опытов по внедрению технологий безэкипажного судоходства. Технический результат заключается в том, что береговой сегмент комплекса оснащен таким программным обеспечением, а подвижный сегмент комплекса оснащен такими средствами управления, что возникает возможность осуществлять управление судном по концепции от причала до причала, подразумевающей автоматическое управление в режимах швартовки-отшвартовки, удержания позиции и следования по заданной траектории. Технический результат достигается оснащением подвижного сегмента испытательного комплекса средствами управления, присущими судам с динамическим позиционированием, оснащением берегового сегмента программным обеспечением, обеспечивающим возможность автоматически и дистанционно управлять такими типами подвижных морских объектов, в том числе от причала до причала. 1 з.п. ф-лы, 8 ил., 1 табл.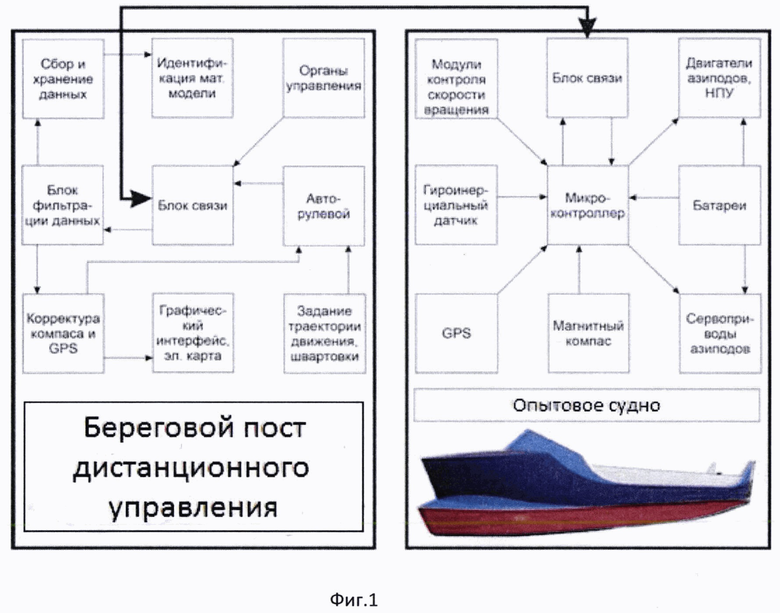
1. Навигационный испытательный комплекс, включающий надводный подвижный сегмент, выполненный в виде малогабаритного опытового судна, с размещенными на борту азиподами, носовыми подруливающими устройствами, элементами питания, датчиками, устройствами связи, микроконтроллерами с программным обеспечением в виде системы сбора и обмена информацией и береговой мобильный сегмент, который содержит систему индикации, картографии и дистанционного ручного и автоматического управления подвижным сегментом на базе портативного компьютера с устройством связи, отличающийся тем, что система управления, картографии и индикации, являющаяся программным обеспечением берегового сегмента, включает блоки сбора, хранения, фильтрации и анализа данных, графический интерфейс, блок построения и идентификации математической модели движения судна, блок задания траектории движения, точки удержания судна и схемы швартовок, блок ручного управления азиподами и подруливающими устройствами, блок корректуры компаса и GPS, блок автоматического управления, формирующий управляющие воздействия на средства управления надводным подвижным сегментом, а на борту опытового судна система сбора и обмена кинематической, навигационной и управляющей информации содержится в микроконтроллере Arduino как программное обеспечение, устройство связи, комплекс датчиков: гироскопический датчик и акселерометр, датчик магнитного поля Земли, приемник GPS, при этом надводный подвижный и береговой сегменты обмениваются информацией с заданной частотой посредством соответствующих устройств связи, которые выполнены с возможностью использования частот Wi-Fi и УКВ для обмена данными по протоколу TCP-IP.
2. Навигационный испытательный комплекс по п. 1, отличающийся тем, что малогабаритное опытовое судно имеет длину 2500 мм, ширину 400 мм, высоту борта 400 мм, осадку 150 мм, в качестве средств управления использует два кормовых азипода и два носовых подруливающих устройства, способно функционировать в режиме динамического позиционирования.
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| 0 |
|
SU153109A1 | |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
| СПОСОБ НАТУРНЫХ ИСПЫТАНИЙ БЕЗЭКИПАЖНЫХ СУДОВ | 2021 |
|
RU2775813C1 |
| СПОСОБ ПРОВЕРКИ ТОЧНОСТИ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2789714C1 |
| Система высокоточного локального 3D − позиционирования водных транспортных средств для навигации и маневрирования на опасных участках внутренних водных путей | 2021 |
|
RU2768244C1 |
| WO 2019031969 A1, 14.02.2019. | |||

