Область техники
Настоящее изобретение относится к навигационному устройству, выдающему инструкции по навигации пользователю в зависимости от записанного профиля.
Уровень техники
Навигационные устройства предшествующего уровня техники, построенные на базе GPS (глобальной системы позиционирования), хорошо известны и широко используются в качестве автомобильных навигационных систем. Такое навигационное устройство, построенное на базе GPS, относится к вычислительному устройству, которое в функциональном соединении с внешним (внутренним) GPS-приемником способно определять собственную глобальную позицию. Кроме того, вычислительное устройство способно определять маршрут между начальным и конечным адресами, которые могут быть введены пользователем вычислительного устройства. В типичном варианте вычислительное устройство способно посредством программного обеспечения вычислять «наилучший» или «оптимальный» маршрут между местоположениями начального и конечного адресов из картографической базы данных. «Наилучший» или «оптимальный» маршрут определяется на основе предварительно определенных критериев и не обязательно является самым быстрым или самым коротким маршрутом. Он может быть также предпочтительным маршрутом на основе поездок по предыдущим маршрутам.
Навигационное устройство может, в типичном варианте, быть прикреплено на приборную доску транспортного средства, а также может быть реализовано как часть бортового компьютера транспортного средства или автомобильной аудиосистемы. Навигационное устройство также может быть (частью) носимой системой, например PDA или телефоном.
Используя позиционную информацию, получаемую от GPS-приемника, вычислительное устройство может определять на регулярной основе собственную позицию и может отображать текущую позицию транспортного средства пользователю. Навигационное устройство может содержать устройства памяти для хранения картографических данных и дисплей для отображения выбранной части картографических данных.
Кроме того, оно может предоставлять инструкции, как следовать определенному маршруту посредством соответствующих навигационных указаний, отображаемых на дисплее и/или формируемых в качестве звуковых сигналов из динамиков (например, «поверните налево через 100 метров»). Графика, изображающая действия, которые должны быть выполнены (например, стрелка налево указывает поворот налево впереди), может быть отображена в строке состояния, а также может быть самостоятельно наложена на соответствующие развязки дорог/повороты и т.п. на карте.
Хорошо известна способность автомобильных навигационных систем предоставлять возможность водителю, когда он ведет автомобиль вдоль маршрута, вычисленного навигационной системой, инициировать повторное вычисление маршрута. Это полезно, когда на пути автомобиля встречаются дорожные работы или большой автомобильный затор.
Также хорошо известна способность предоставлять возможность пользователю выбирать тип алгоритма вычисления маршрута, применяемого навигационной системой, путем выбора, например, «нормального» режима и «быстрого» режима (который вычисляет маршрут в кратчайшее время, но не исследует множество альтернативных маршрутов как в нормальном режиме).
Также хорошо известна возможность предоставления вычисления маршрута с заданными пользователем критериями, например, пользователь может предпочесть обзорный маршрут, который должен быть вычислен устройством. Программное обеспечение устройства затем вычисляет различные маршруты и оценивает наиболее предпочтительные из них, которые содержат вдоль маршрута наибольшее число точек интереса (известные как POI), которые отмечены, например, как являющиеся живописной архитектурой.
Патентная заявка EP 1530025 A2 раскрывает навигационную систему транспортного средства, которая выполнена с возможностью изучать привычки/предпочтения пользователя. Навигационная система транспортного средства наблюдает за привычками водителя и обновляет базу данных, чтобы, таким образом, заставить навигационную систему транспортного средства содержать предпочтение для привычек водителя, так что навигационная система более приспособлена к маршрутам, которые желательны конкретными водителями при поездке до определенных пунктов назначения. Навигационная система содержит специальный модуль искусственного интеллекта (AI), выполненный с возможностью наблюдать за привычками водителя. Основной причиной для настройки под желания пользователя является недопущение раздражения пользователя. Однако направление водителя в нежелательном направлении является только одним случаем раздражения водителя.
Другим даже более важным случаем раздражения является способ, которым выдаются инструкции. Если, например, навигационное устройство говорит водителю «езжайте налево на следующем перекрестке», это может уже быть раздражающим для водителя, который очень хорошо знает этот перекресток. Этот случай раздражения не может быть предотвращен настоящими навигационными устройствами.
Краткое описание
Таким образом, желательно предоставить навигационное устройство, которое выдает инструкции по навигации, которые уменьшают вероятность раздражения пользователя.
Следовательно, согласно аспекту заявленного изобретения предоставлено навигационное устройство, выполненное с возможностью выдавать инструкции по навигации водителю транспортного средства, при этом устройство содержит:
- модуль вычисления маршрута, который выполнен с возможностью определять маршрут от пункта отправления до пункта назначения;
- модуль инструкций, выполненный с возможностью создавать набор базовых инструкций для водителя с тем, чтобы позволить водителю ехать по определенному маршруту; и
- модуль профиля, выполненный с возможностью выстраивать, по меньшей мере, один профиль, характеризующийся тем, что навигационное устройство содержит:
- переводчик «профиль-инструкция», выполненный с возможностью преобразовывать набор базовых инструкций в набор выводимых инструкций в зависимости от упомянутого, по меньшей мере, одного профиля.
Профиль может, например, содержать так называемый профиль водителя, в котором сохранены параметры, которые отражают предпочтения, свойства или привычки водителя. В зависимости от записанных значений этих параметров навигационное устройство преобразует базовую инструкцию в выводимые инструкции, выданные водителю. Так как профиль водителя выстраивается и будет изменяться по времени, иногда определенные базовые инструкции преобразуются другим способом, чем в другие разы. Изменение выводимых инструкций также называется «адаптацией» инструкций. Комбинация двух технологий, т.е. построение профиля и адаптация инструкций по навигации, делает навигационное устройство, согласно изобретению, более персонально-ориентированным навигационным средством. Также предоставление правильных инструкций конкретному водителю может содействовать более безопасному поведению.
В другом аспекте изобретения предоставлен способ предоставления указаний по навигации с помощью навигационного устройства, способ содержит:
- определение маршрута от пункта отправления до пункта назначения;
- создание набора базовых инструкций для пользователя с тем, чтобы позволить пользователю ехать по определенному маршруту; и
- построение, по меньшей мере, одного профиля,
характеризующийся преобразованием набора базовых инструкций в набор выводимых инструкций в зависимости от упомянутого, по меньшей мере, одного профиля.
В другом аспекте предоставлена компьютерная программа, которая, когда загружена в вычислительное окружение, дает вычислительному окружению возможность выполнять способ, описанный выше.
В заключение, предоставлен носитель данных, содержащий компьютерную программу, упомянутую выше.
Краткое описание чертежей
Варианты осуществления настоящего изобретения будут описаны, только в качестве примера, со ссылкой на сопроводительные схематические чертежи, в которых соответствующие ссылочные символы указывают соответствующие части, и на которых:
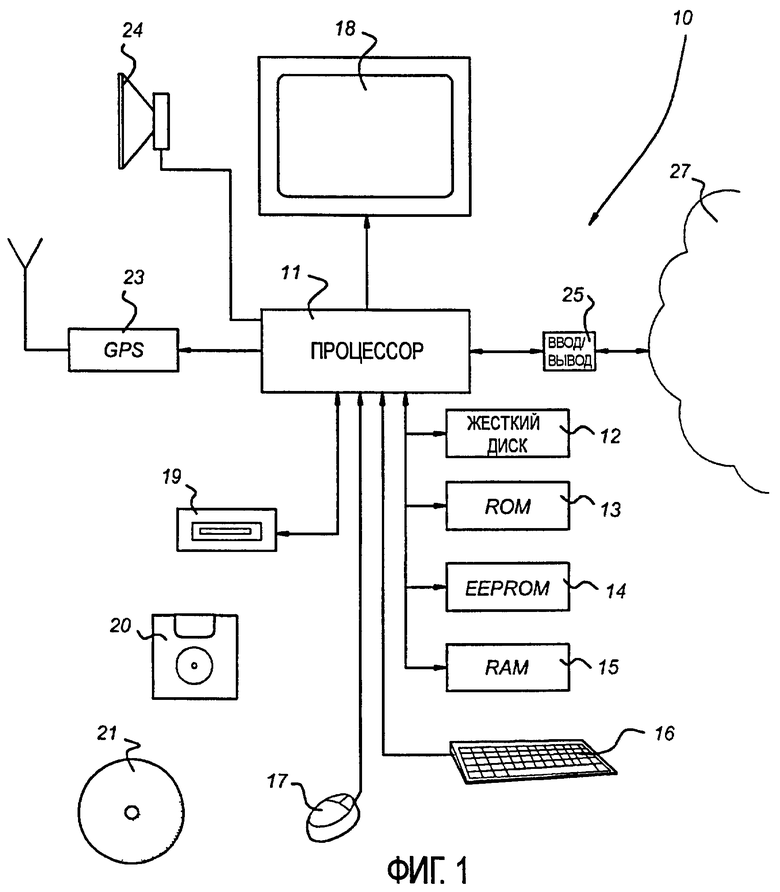
фиг.1 схематически представляет схематическую блок-схему навигационного устройства согласно варианту осуществления;
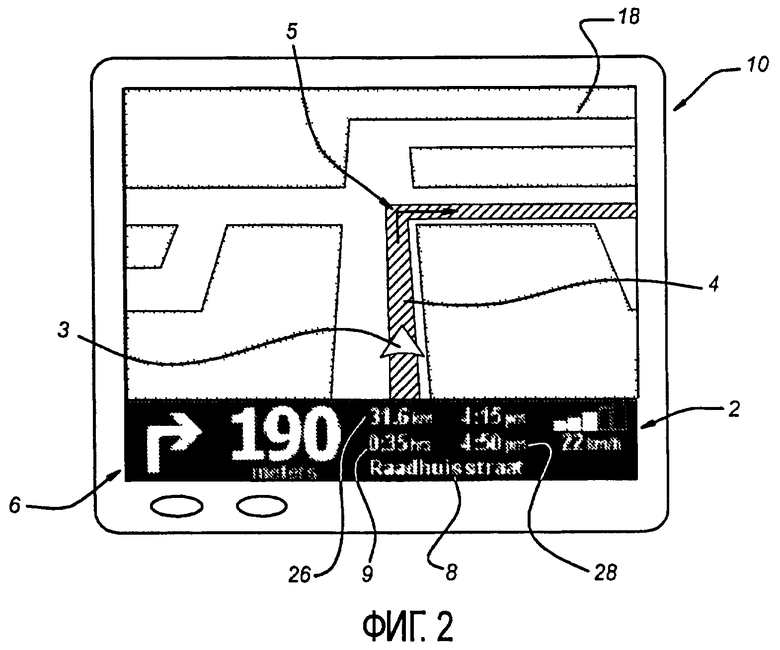
фиг.2 схематически представляет схематический вид навигационного устройства;
фиг.3 показывает автомобиль, содержащий навигационное устройство согласно варианту осуществления;
фиг.4 схематически показывает схему модулей в навигационном устройстве согласно варианту осуществления;
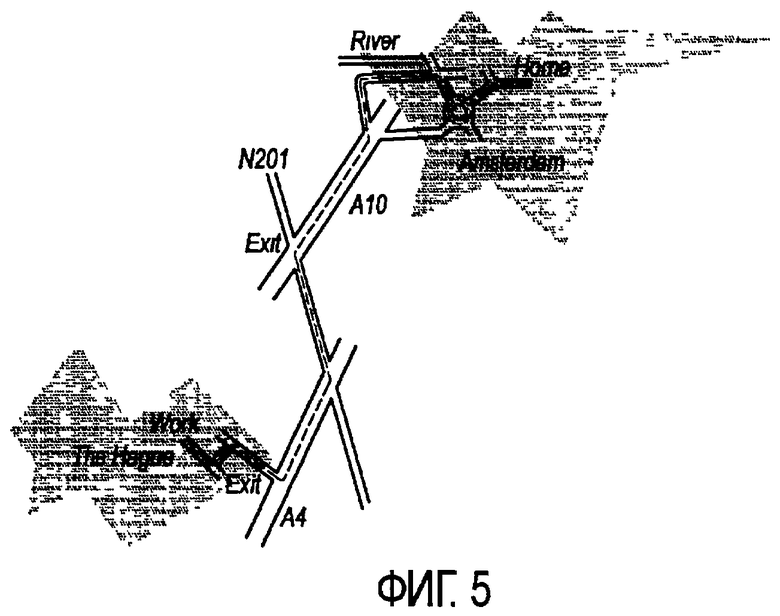
фиг.5 показывает пример маршрута от Амстердама до Гааги с двумя съездами с шоссе;
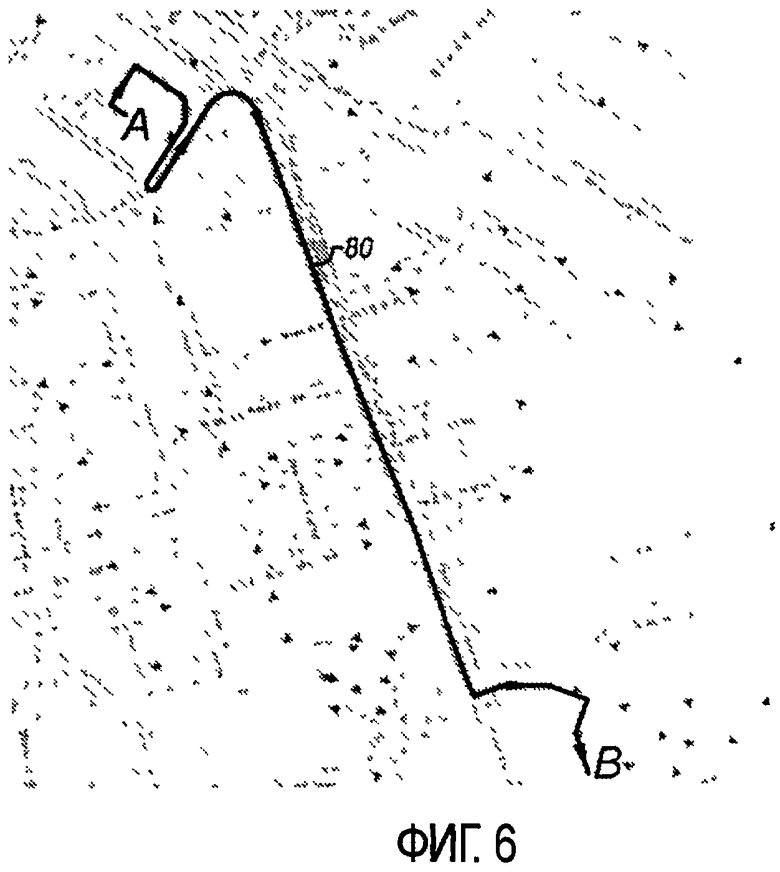
фиг.6 показывает пример маршрута от пункта A отправления до пункта B назначения в Амстердаме.
Подробное описание
Фиг.1 показывает схематическую блок-схему варианта осуществления навигационного устройства 10, содержащего процессор 11 для выполнения арифметических операций. Процессор 11 выполнен с возможностью соединяться с блоками памяти, которые хранят инструкции и данные, такими как жесткий диск 12, постоянное запоминающее устройство (ROM) 13, электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) 14 и оперативное запоминающее устройство (RAM) 15. Блоки памяти могут содержать картографические данные 22. Эти картографические данные могут быть двумерными картографическими данными (широта и долгота), но также могут содержать третье измерение (высоту). Картографические данные могут дополнительно содержать дополнительную информацию, например информацию о бензиновых/газовых заправочных станциях, точках интереса. Картографические данные могут также содержать информацию о форме зданий и объектов вдоль дороги.
Процессор 11 также может быть выполнен с возможностью соединяться с одним или более устройств ввода, такими как клавиатура 16 или мышь 17. Клавиатура 16 может, например, быть виртуальной клавиатурой, представленной на дисплее 18, который является экраном, чувствительным к прикосновению. Процессор 11 может дополнительно быть выполнен с возможностью связываться с одним или более устройств вывода, таким как дисплей 18, динамик 24 и одним или более блоков 19 считывания для того, чтобы считывать, например, флоппи-диски 20 или CD-ROM 21. Дисплей 18 может быть традиционным компьютерным дисплеем (например, ЖК) или может быть дисплеем проекционного типа, таким как расположенный на уровне лобового стекла дисплей, используемый для проецирования инструментальных данных на лобовое стекло или ветровой щиток автомобиля. Дисплей 18 может также быть дисплеем, выполненным с возможностью функционировать как чувствительный к прикосновению экран, что позволяет пользователю вводить инструкции и/или информацию посредством прикосновения к дисплею 18 своим пальцем.
Динамик 24 может быть реализован как часть навигационного устройства 10. В случае, когда навигационное устройство 10 используется как автомобильное навигационное устройство, навигационное устройство 10 может использовать динамики автомобильной аудиосистемы, бортового компьютера или подобное.
Процессор 11 дополнительно может быть выполнен с возможностью связываться с устройством 23 позиционирования, таким как GPS-приемник, которое предоставляет информацию относительно позиции навигационного устройства 10. Согласно этому варианту осуществления устройство 23 позиционирования - это устройство 23 позиционирования, построенное на базе GPS. Тем не менее, следует понимать, что навигационное устройство 10 может быть реализовано любым типом технологии определения местоположения и не ограничено GPS. Оно может быть реализовано с помощью других видов GNSS (спутниковая система глобальной навигации), такой как Европейская система Галилео. Также оно не ограничено системами определения положения/скорости на спутниковой основе и также может быть развернуто с помощью наземных маяковых сигналов или любых других видов систем, которые позволяют устройству определять свое географическое положение.
Тем не менее, следует понимать, что они могут быть представлены с другими или отличными по количеству блоками памяти, устройствами ввода и устройствами считывания, хорошо известными специалистам в данной области техники. Кроме того, одно или несколько этих устройств могут быть физически расположены удаленно от процессора 11, если потребуется. Процессор 11 показан как один блок, однако он может содержать несколько процессоров, функционирующих параллельно и управляемых одним главным процессором, который может быть расположен удаленно от других, как хорошо известно специалистам в данной области техники.
Навигационное устройство 10 показано как вычислительная система, но может быть любой системой обработки сигналов с аналоговой и/или цифровой и/или программной технологией, выполненной с возможностью выполнять функции, описываемые в данном документе. Следует понимать, что, несмотря на то, что навигационное устройство 10 показано на фиг.1 как множество компонентов, навигационное устройство 10 может быть реализовано как единое устройство.
Навигационное устройство 10 может использовать навигационное программное обеспечение, такое как навигационное программное обеспечение от TomTom B.V., называемое Navigator. Программное обеспечение Navigator может работать на Pocket PC PDA-устройстве с сенсорным экраном (т.е. с управлением стилусом), таком как Compaq iPaq, а также на любых других устройствах, которые имеют встроенный GPS-приемник 23. Объединенная система PDA и GPS-приемника разработана для того, чтобы использоваться в навигационной системе в транспортном средстве. Варианты осуществления также могут быть осуществлены в любой другой форме навигационного устройства 10, например, в виде GPS-приемника/компьютера/дисплея, или устройства, сконструированного для использования вне транспортного средства (например, для пешеходов) или в транспортных средствах, отличных от автомобиля (например, в самолетах).
Фиг.2 изображает пример функционирующего дисплея 18 навигационного устройства 10, которое описано выше.
Навигационное программное обеспечение, когда запущено в навигационном устройстве 10, отображает экран нормального навигационного режима на дисплее 18, как показано на фиг.2. Этот вид может предоставлять инструкции для управления транспортным средством с помощью комбинации текста, символов, голосовых подсказок и перемещаемой карты. Ключевые элементы пользовательского интерфейса следующие: 3D карта, занимающая большую часть экрана. Отметим, что карта также может быть показана как 2D карта.
Карта показывает позицию навигационного устройства 10 и его непосредственное окружение, вращаемое таким образом, что направление, в котором навигационное устройство 10 перемещается, всегда направлено «вверх». Строка 2 состояния может проходить через экран в нижней четверти экрана. Текущее положение навигационного устройства 10 (которое навигационное устройство определило самостоятельно с помощью традиционного GPS-определения положения) и его ориентация (которая выводится из направления движения) показаны позиционной стрелкой 3. Маршрут 4, вычисленный устройством (с помощью алгоритмов вычисления маршрута, сохраненных в устройствах 11, 12, 13, 14, 15 памяти в качестве применяемых к картографическим данным, сохраненным в картографической базе данных в устройствах 11, 12, 13, 14, 15 памяти), показан как затемненный путь. На маршруте 4 все основные действия (например, закругления поворотов, пересечения дорог, круговые развязки и т.п.) схематически изображены стрелкой 5, наложенной поверх маршрута 4. Строка 2 состояния также включает в себя с левой стороны схематическую иконку, изображающую следующее действие 6 (в данном случае поворот направо). Строка 2 состояния также показывает расстояние до следующего действия 6 (например, поворот направо - здесь расстояние составляет 190 м) как извлеченное из базы данных всего маршрута, вычисленного устройством (т.е. из списка всех дорог и связанных предпринимаемых действий, задаваемых маршрутом). Строка 2 состояния также показывает название текущей дороги 8, оставшееся до конца поездки время 9 (в данном случае 35 минут), актуальное оценочное время 28 прибытия (16:50) и расстояние до места назначения 29 (31,6 км). Строка 2 состояния может дополнительно показывать дополнительную информацию, например мощность GPS-сигнала в виде индикатора мощности стилем подобно используемому в мобильных телефонах.
Как уже упомянуто выше, навигационное устройство 10 может содержать устройство ввода, такое как чувствительный к прикосновению экран, который позволяет пользователю вызывать навигационное меню (не показано). Из этого меню могут быть инициированы и управляться другие навигационные функции. Разрешение выбора навигационных функций из экрана меню, которые сами по себе очень легко вызываются (например, одним действием от отображения карты до экрана меню), значительно упрощает взаимодействие пользователя и делает его более быстрым и простым. Навигационное меню включает в себя варианты для ввода пользователем места назначения.
Фактическая физическая структура навигационного устройства 10 сама по себе фундаментально может не отличаться от любого традиционного карманного компьютера, за исключением встроенного GPS-приемника 23 или GPS-данных, получаемых от внешнего GPS-приемника. Следовательно, устройства 12, 13, 14, 15 памяти хранят алгоритмы вычисления маршрута, картографическую базу данных и программное обеспечение пользовательского интерфейса; процессор 12 интерпретирует и обрабатывает пользовательский ввод (например, с помощью чувствительного к прикосновению экрана) для того, чтобы ввести начальный и конечный адреса и все другие входные команды управления, и применяет алгоритмы вычисления маршрута для того, чтобы вычислить оптимальный маршрут. «Оптимальность» может ссылаться на критерий, например наименьшее время или наикратчайшее расстояние, или некоторые другие связанные с пользователем факторы.
Более конкретно, пользователь вводит требуемое место назначения в навигационное программное обеспечение, запущенное на навигационном устройстве 10, с помощью предоставленных устройств ввода, таких как чувствительный к прикосновению экран 18, клавиатура 16 и т.п. Пользователь затем выбирает способ, которым будет вычислен маршрут: предлагаются различные режимы, например «быстрый» режим, который вычисляет маршрут очень быстро, но маршрут может не быть кратчайшим; «полный» режим, который просматривает все возможные маршруты и выделяет кратчайший, но дольше по времени вычисления, и т.п. Возможны другие варианты с заданным пользователем маршрутом, который является живописным, например проходит через множество POI (точек интереса), которые помечены как виды с живописной архитектурой, или проходят через множество POI возможного интереса для детей, или использует наименьшее число пересечений дорог, и т.д.
Навигационное устройство 10 может дополнительно содержать устройство 25 ввода-вывода, которое предоставляет навигационному устройству 10 возможность связываться с удаленными системами, такими как другие навигационные устройства 10, персональные компьютеры, серверы и т.д., через сеть 27. Сеть 27 может быть сетью 27 любого типа, например LAN, WAN, Bluetooth, Интернет, интранет и т.п. Связь может быть проводной или беспроводной. Беспроводная линия связи может, например, использовать RF-сигналы (радиочастоту) и RF-сеть.
Изобретение также относится к транспортному средству 40, такому как автомобиль, содержащему навигационное устройство 10, описанное выше, см. фиг.3. Навигационное устройство 10 может, например, быть встроено в приборную панель автомобиля 40 или прикреплено на лобовое окно.
Сами дороги описываются в картографической базе данных, которая является частью навигационного программного обеспечения (или иным образом доступна для него), запущенного на навигационном устройстве 10, как линии, т.е. векторы (например, начальная точка, конечная точка, направление для дороги, полностью дорога составлена из многих сотен таких секций, каждая уникально задана параметрами начальной точки/конечной точки, направления). Карта затем составляется из таких векторов дорог, плюс точки интереса (POI), плюс названия дорог, плюс другие географические элементы, такие как границы парков, границы рек и т.п., все они задаются в терминах векторов. Все картографические элементы (например, векторы дорог, POI и т.п.) задаются в координатной системе, которая соответствует или относится к координатной системе GPS, давая возможность поместить позицию устройства, как определенную через GPS-систему, на соответствующую дорогу, показанную на карте.
Вычисление маршрута использует сложные алгоритмы, которые являются частью навигационного программного обеспечения. Алгоритмы применяются для того, чтобы подсчитать большое количество потенциальных разных маршрутов. Навигационное программное обеспечение затем оценивает их по заданному пользователем критерию (или по настройкам по умолчанию устройства), такому как сканирование в полном режиме, с маршрутом по живописным местам, старинные музеи и без камер измерения скорости. Маршрут, который наилучшим образом соответствует заданным критериям, затем вычисляется процессором 11 и затем сохраняется в базе данных в устройствах 12, 13, 14, 15 памяти как последовательность векторов, названий дорог и действий, которые необходимо выполнить на конечной точке вектора (например, соответствующих предварительно заданным расстояниям вдоль каждой дороги на маршруте, например через 100 метров поворот налево, на улицу х).
Чтобы уменьшить вероятность раздражения, навигационное устройство 10, согласно изобретению, выдает более точные инструкции по навигации, чем настоящие навигационные устройства. Чтобы сделать это, навигационное устройство 10 собирает данные о водителе и использует эти данные, чтобы выдавать правильные инструкции. Как данные собираются и используются, описано ниже со ссылкой на фиг.4-7.
Фиг.4 схематически показывает несколько модулей, содержащихся в навигационном устройстве 10, согласно варианту осуществления изобретения. В этом варианте осуществления навигационное устройство 10 содержит модуль 41 вычисления маршрута, выполненный с возможностью определять маршрут от пункта отправления до пункта назначения с помощью картографических данных из картографической базы 39 данных и информации, введенной пользователем. Кроме того, предусмотрен модуль 42 инструкций, принимающий входные данные от модуля 41 вычисления маршрута, см. стрелку 43, и выполненный с возможностью создавать набор базовых инструкций с тем, чтобы позволить пользователю проехать по определенному маршруту. Примером базовой инструкции является «20 м НАПРАВО», означающая, что через 20 метров водитель должен повернуть направо.
Также предусмотрены один или более модулей профилей, которые выполнены с возможностью выстраивать один или более профилей, как будет описано более подробно ниже. В этом варианте осуществления модули профилей содержат компонент 44 построения профиля водителя, выстраивающий профиль водителя, компонент 45 построения профиля, относящегося к окружающей среде, выстраивающий профиль, относящийся к окружающей среде, и компонент 46 построения профиля маршрута, выстраивающий профиль маршрута. Соответствующие профили сохраняются, например, в запоминающем устройстве 12. Предусмотрен переводчик 48 «профиль-инструкция», который принимает набор базовых инструкций, см. стрелку 51, созданный модулем 42 инструкций, и считывает один или более профилей из запоминающего устройства 12. Переводчик 48 «профиль-инструкция» имеет доступ к базе 70 данных инструкций для человека, в которой сохранены возможные человеческие инструкции. Примером инструкции для человека является «поверните направо» или «выполните разворот».
Навигационное устройство 10 также содержит устройство 50 вывода, которое принимает выводимые инструкции, см. стрелку 57, от переводчика 48 «профиль-инструкция». Устройство 50 вывода может содержать динамик 24 или экран 18, показанный на фиг.1, или любое другое подходящее устройство вывода.
Навигационное устройство 10 может также содержать компонент 52 распознавания водителя, который выполнен с возможностью распознавать водителя, сидящего за рулем автомобиля 40. После того как навигационное устройство 10 включено, компонент 52 распознавания водителя распознает водителя, и ID пользователя, см. стрелку 60, будет передан компоненту 44 построения профиля водителя. Водитель может быть распознан с помощью других технологий. Пользователь может, например, быть распознан по его имени, выбранному на сенсорном экране 18. Он может также быть распознан посредством номера его мобильного телефона, переданного навигационному устройству 10 посредством телефона. Как следует понимать специалисту в данной области техники, возможны другие средства, например автомобильный ключ, беспроводная, снабженная меткой микросхема и т.д.
Также предусмотрено записывающее устройство 62 водителя, которое выполнено с возможностью записывать так называемые параметры манеры вождения автомобиля, которые отражают манеру вождения водителя. Записанные значения этих параметров манеры вождения, см. стрелку 63, передаются компоненту 44 построения профиля водителя. Записывающее устройство 62 водителя выполнено с возможностью непрерывно собирать данные о манере вождения водителя. Компонент 44 построения профиля водителя будет использовать параметры манеры вождения, чтобы выстроить профиль водителя или улучшить активный профиль водителя. Параметры манеры вождения могут собираться даже без запрограммированного маршрута.
Возможными параметрами манеры вождения, которые могут быть записаны и переданы компоненту 44 построения профиля водителя, чтобы выстроить профиль водителя, являются:
1) коэффициент ускорения: то есть скользящее среднее значение ускорения транспортного средства в (м/с2), разделенное на предварительно определенное максимальное ускорение;
2) коэффициент торможения: то есть скользящее среднее значение торможения в (м/с2) транспортного средства для коэффициента торможения в (м/с2), разделенное на предварительно определенное максимальное торможение;
3) коэффициент агрессивности прохождения поворота: то есть скользящее среднее значение ускорения в повороте во время поворота в (м/с2), разделенное на предварительно определенное максимальное ускорение в повороте;
4) число раз, которое водитель проезжает в отдельной административной области (например, Париж, родной город, место работы).
После того как водитель распознан посредством компонента 52 распознавания водителя, компонент 44 построения профиля водителя считает соответствующий профиль водителя из запоминающего устройства 12. Если водитель использует навигационное устройство 10 в первый раз, компонент 44 построения профиля водителя построит законченный новый профиль водителя или установит предварительно установленный профиль, уже сохраненный в навигационном устройстве 10. Компонент 44 построения профиля водителя может иметь возможность хранить профили водителей для нескольких водителей и может предоставлять либо автоматизированную, либо ручную возможность переключаться между ними. Профиль водителя может быть сохранен в отдельных файлах или в структуре базы данных, дающей возможность адресации отдельного профиля водителя, присваивая соответствующий индекс пользователя. Так как профиль водителя может содержать персональные связные данные, такие как ID беспроводной метки, номер или ID мобильного телефона или другое персональное указание, чтобы уникально выбрать пользователя, такое как отпечаток пальца или пароль, профиль водителя может быть также адресован этими данными. В варианте осуществления пользователь может иметь возможность идентифицировать себя вручную, выбирая свой профиль из списка, показанного на экране 18.
Профиль водителя может содержать один или более из следующих параметров водителя, которые имеют значения между, например, 0-100:
A. домашний адрес;
B. ID водителя;
C. дата рождения;
D. число раз, которое административная область была посещена;
E. процент съездов, игнорированных водителем: 0…100;
F. водитель поворачивает налево вместо поворота направо: 0…100;
G. степень агрессивности: 0…100;
H. номер мобильного телефона;
I. водитель делает телефонный вызов прямо сейчас: 0 (Нет) или 100 (Да);
J. уровень сложности условий вождения 0…100;
K. водитель не хочет получать инструкции по навигации в местоположении своего дома (или любом недавнем пункте назначения: 0…100;
L. чувствительность водителя к текущему дню недели: 0…100;
M. чувствительность водителя к времени дня: 0…100.
Следующее объяснение опишет, как значения параметров водителя могут быть определены или вычислены.
A. домашний адрес: улица, город и страна вводятся вручную;
B. ID водителя: имя или номер или персональный код;
C. дата рождения: вручную вводится водителем;
D. число раз, которое административная область была посещена: множество предварительно определенных областей, таких как города, сохранено в памяти, и счетчик увеличивается каждый раз, когда водитель едет в одной из предварительно определенных областей;
E. процент съездов, игнорированных водителем: 100×скользящее среднее числа игнорированных съездов/общее число съездов в запрограммированном маршруте;
F. процент поворотов, где водитель повернул налево для поворота направо или наоборот: скользящее среднее из 100×число раз, когда инструкция поворота налево или направо была неверно истолкована водителем/общее число поворотов в течение скользящего окна предварительно определенного количества часов езды (предварительно установлено в 100 часов);
G. степень агрессивности: 100×(коэффициент агрессивности поворота + коэффициент ускорения + коэффициент торможения)/3;
H. номер мобильного телефона: вводится вручную или считывается из мобильного телефона;
I. водитель делает телефонный вызов в момент, когда запланирован вывод инструкции: если активно телефонное соединение, SMS читается или читается вслух, или любая другая удаленная связь с человеком обнаружена системой, это значение равно 100, иначе 0;
J. уровень сложности условий вождения: (коэффициент осадков + коэффициент ветра + коэффициент дорожных условий + коэффициент дорожного движения)/4, при этом коэффициент осадков равен 0 (сухая погода), 20 (дождь), 60 (град) или 80 (снег), а коэффициент ветра=0 является линейной функцией количества Бфт, где 0 - безветренно и 100=8 Бфт или больше, а коэффициент дорожных условий равен 0 (сухая), 50 (мокрая), 100 (скользкая), и коэффициент дорожного движения равен 0 (свободное), 40 (среднее), 70 (оживленное), 100 (с пробками);
K. водитель не желает получать инструкции по навигации в местоположении собственного дома (или любом недавнем пункте назначения): этот параметр первоначально установлен равным 0 для каждого запланированного пункта назначения. Затем каждый раз при езде по маршруту от или к этому пункту назначения он увеличивается на 5 до тех пор, пока он, в конце концов, не достигнет 100. Однако значение может уменьшаться на 1 каждый день, когда водитель не ездит из или к этому пункту назначения. В результате, со временем значение может достигнуть и остаться в 0;
L. чувствительность водителя к текущему дню недели: «Событием» является каждый случай, когда маршрут водителя отличается от запрограммированного маршрута. Относительное расхождение (стандартное расхождение, поделенное на среднее) события в соотношении с днем недели вычисляется как:
В этом примере X представляет число событий в день, M - это среднее значение всех дней недели, N = числу дней недели (7). Если расхождение событий одинаково поделено по дням недели, тогда этот коэффициент = 0. Если водитель делает ошибки только в понедельник, этот коэффициент = 100. Если водитель делает ошибки только по понедельникам и вторникам, это значение будет 64. Коэффициент 2.65 является только коэффициентом масштабирования.
M. чувствительность водителя ко времени дня: используется та же формула, что и упомянутая в пункте G, где X представляет число событий в четверти дня: утро, полдень, вечер, ночь, M - среднее всех четвертей дня, N = число четвертей дня (4). Если расхождение событий одинаково поделено по утрам, полдню, вечерам и ночам, тогда этот коэффициент = 0. Если водитель делает ошибки только в течение ночи, этот коэффициент = 100. Если водитель делает ошибки только по утрам и ночам, это значение будет 64.
Компонент 45 построения профиля, относящегося к окружающей среде, изображенный на фиг.4, непрерывно дискретизирует возможные относящиеся к окружающей среде данные, называемые параметрами окружающей среды. Возможными параметрами окружающей среды и их значениями являются:
A. дорожные условия по маршруту, значение: (сухо, мокро, скользко)
B. погодные условия, значение: (сухо/дождь/град/снег) и (ветер 0-100) (100 равно 8 Бфт или более)
C. дневной свет, значение: (светло, сумерки, темнота)
D. время дня, значение: (утро, полдень, вечер, ночь)
E. время года, значение: (весна, лето, осень, зима)
F. день недели, значение: 0-6.
Дорожные условия и погодные условия могут, например, приниматься от удаленного сервера, и информация о дневном свете может, например, определяться с помощью географического местоположения навигационного устройства 10 и/или посредством светочувствительного датчика. Время дня, время года и день недели могут высчитываться из настоящего времени, определенного внутренними часами, не показаны, навигационного устройства 10.
Компонент 46 построения профиля маршрута выполнен с возможностью непрерывно дискретизировать возможные, относящиеся к маршруту данные, называемые параметрами маршрута. Возможными параметрами маршрута и их значениями являются:
1) условия дорожного движения по маршруту, значение: (свободное, среднее, оживленное, с пробками);
2) тип дороги, значение (шоссе, второстепенные дороги, езда по городу).
Условия дорожного движения могут, например, быть считаны с удаленного сервера или приемника данных о дорожном движении, а тип дороги может быть считан из картографической базы 39 данных, см. стрелку 38.
После того как водитель запрограммировал маршрут, каждый раз, когда водитель игнорирует инструкцию по навигации или спонтанно отклоняет свой курс от маршрута, компонент 44 построения профиля водителя может записывать один или более из следующих «ответных параметров навигации»:
1. Важность пропуска инструкции, это значение может быть вычислено с помощью дополнительного расстояния, чтобы вернуться на маршрут.
2. Число раз (процент), которое водитель фактически разворачивается, когда сообщается после игнорирования инструкции по навигации.
3. GPS-местоположение и фактический курс плюс исходный курс. Они будут отправлены удаленному серверу. Если многие водители имеют одну и ту же проблему в конкретном месте, картографические данные могут быть неправильными. Удаленный сервер может сохранить их в системе базы данных. После ручной или автоматической проверки записей в системе базы данных может быть сделано заключение о том, что база данных для этого GPS-местоположения имеет дефекты, или картографическая база данных имеет другие недостатки. Сервер может ответить навигационному устройству 10 сообщением, что определенное GPS-местоположение должно быть игнорировано так, чтобы обновление профиля водителя не могло быть выполнено, когда водителю не удается следовать инструкциям, пока картографические данные заменяются новой версией.
4. Текущая громкость голосовой инструкции, значение 0-100.
5. Число раз, когда выдана инструкция «развернитесь при первой возможности».
6. Скорость (v) в (м/с) от GPS-приемника и/или колесного/приводного датчика(ов).
7. Фактическое расстояние от местоположения дома водителя.
8. Левостороннее движение, при правостороннем движении в месте проживания или наоборот (да/нет).
9. Число ошибок, которое делает водитель, когда он едет налево, когда инструкция сказала «направо», и наоборот.
10. Число раз, когда съезд с шоссе пропущен.
11. Число раз, когда пропущена улица (левая/правая).
12. Число спонтанных отклонений (налево или направо без инструкции).
13. GPS-покрытие и точность в момент, когда инструкция игнорируется, значение: 0 = нет данных, 100 = точное.
В варианте осуществления события, в которых водитель игнорирует инструкции, записываются и сопровождаются дополнительными данными, такими как отметка времени и местоположение. Навигационное устройство 10 выполнено с возможностью создавать и хранить «список неясных местоположений», где водитель может быть запутан текущей ситуацией или возможными ошибками картографических данных. Список неясных местоположений может быть автоматически очищен так, что останутся только события, не более 1 года. Этот список принимается во внимание каждый раз, когда водитель едет по маршруту. Если водитель едет в таком перечисленном местоположении, тогда инструкции по навигации адаптируются, чтобы избежать дополнительных ошибок, на основе числа раз, сколько это местоположение было перечислено. Число раз, которое водитель сделал ошибку в этом местоположении, должно быть >=2. Если так, водитель может нуждаться в адаптированных инструкциях. В варианте осуществления параметры водителя «процент съездов, игнорированных водителем» и «процент поворотов, где водитель ошибочно повернул налево вместо направо или наоборот» будут временно умножены на 2 в течение периода, когда водитель находится ближе, чем 1 км, к местоположению в списке неясных местоположений. Увеличивая значение этих двух параметров водителя, профиль водителей изменяется на профиль «более неуверенного» водителя, которому нужно больше выводимых инструкций.
Компонент 44 построения профиля водителя, согласно варианту осуществления, выполнен с возможностью выстраивать профиль водителя с помощью одного или более параметров манеры вождения и ответных параметров навигации, описанных выше. Построенный профиль пользователя затем отправляется переводчику 48 «профиль-инструкция», который преобразует созданный набор базовых инструкций в зависимости от профиля водителя, как будет объяснено позже.
Согласно другому варианту осуществления навигационное устройство 10 не содержит компонент 44 построения профиля водителя, а вместо этого содержит только компонент 45 построения профиля, относящегося к окружающей среде, который выстраивает профиль, относящийся к окружающей среде. Примером такого профиля среды и его параметров является:
A. дорожные условия по маршруту, значение: (сухо, мокро, скользко)
B. погодные условия, значение: (сухо, дождь, град, снег, также сила ветра в Бфт 0=безветренно, 100=8 Бфт или более)
C. дневной свет, значение: (светло, сумерки, темнота)
D. время дня, значение: (утро, полдень, вечер, ночь)
E. время года, значение: (весна, лето, осень, зима)
F. день недели, значение: 0 = Воскресенье по 6 = Суббота.
Отметим, что этот профиль окружающей среды выполнен посредством параметров, относящихся к окружающей среде, уже обсужденных выше. Профиль окружающей среды будет передан переводчику 48 «профиль-инструкция», см. стрелку 55 на фиг.4, который будет использовать относящийся к окружающей среде профиль, чтобы преобразовать базовые инструкции.
Еще в одном варианте осуществления только профиль маршрута строится и отправляется переводчику 48 «профиль-инструкция» компонентом 46 построения профиля маршрута. Пример профиля маршрута содержит все параметры маршрута, описанные выше.
A. условия дорожного движения по маршруту, значение: (легкие, средние, оживленные, затор)
B. тип дороги, значение (шоссе, второстепенные дороги, езда по городу).
Согласно предварительно определенному варианту осуществления компонент 44 построения профиля водителя принимает значения относящихся к окружающей среде параметров от компонента 45 построения профиля, относящегося к окружающей среде профиля, см. стрелку 64, и значения параметров маршрута от компонента 46 построения профиля маршрута, см. стрелку 65. Объединяя, например, относящиеся к окружающей среде параметры с параметрами манеры вождения, компонент 44 построения профиля водителя способен «увидеть», почему водитель действует определенным образом. Например, если погодные условия являются экстремальными, и водитель едет очень медленно по шоссе, не имеет смысла приспосабливать текущий профиль водителя так, чтобы профиль изменился на профиль «спокойного водителя». В таких ситуациях профиль водителя не исправляется и остается достоверным. Дополнительные, относящиеся к окружающей среде параметры также могут использоваться, чтобы увидеть, как водитель реагирует на внешние раздражители типа дождя и т.д., и сохранить эту информацию в профиле водителя.
Компонент 46 построения профиля маршрута выполнен с возможностью дискретизировать условия дорожного движения, считывая, например, данные из удаленного сервера или приемника данных о дорожном движении. Условия дорожного движения также могут передаваться модулю 41 вычисления маршрута, см. стрелку 66 на фиг.4. Условия 66 дорожного движения могут использоваться, чтобы повторно вычислять маршрут, принимая во внимание дорожные пробки и т.д., как будет известно специалисту в данной области техники.
Согласно варианту осуществления переводчик 48 «профиль-инструкция» примет во внимание профили, сохраненные в памяти, и преобразует базовые инструкции в K выводимых инструкций, где K= 0, 1, 2, 3. Также возможно воспроизвести дополнительный звук в ситуациях, где это является подходящим согласно текущим профилям, например, сигнал тревоги, когда водителю необходимо съехать с шоссе, в то время как он разговаривает по телефону.
В другом варианте осуществления переводчик 48 «профиль-инструкция» выполнен с возможностью удалять инструкцию из стандартного набора инструкций. Например, предупреждение о том, что настоящая трасса является трассой со скоростью 50 км/ч, не нужно выдавать водителю, очень хорошо знакомому с этой трассой, который к тому же не является агрессивным водителем.
Еще в одном варианте осуществления переводчик 48 «профиль-инструкция» выполнен с возможностью изменять выводимую инструкцию. Переводчик 48 «профиль-инструкция» может, например, изменить голос, используемый для произношения выводимой инструкции, или изменить громкость произношения выводимой инструкции. Кроме того, может быть возможным изменить момент времени выводимой инструкции. Инструкции по навигации могут быть даны раньше или позже, чем определено в стандартном наборе инструкций 51. Это может быть полезно в ситуациях, в которых дорожное движение очень оживленное, и почти невозможно изменить полосы движения. В таких случаях водители могут принимать более ранние инструкции. Расстояние между точкой, в которой выдается инструкция, и точкой маршрута, ассоциативно связанной с инструкцией, также может быть изменено в зависимости от профилей. Например, если погода плохая, и/или если водитель неопытный, определенная инструкция может быть дополнительно выдана перед конкретным перекрестком или съездом. Способ, которым выдается отдельная инструкция, также может быть изменен. Инструкция типа «езжайте налево» может быть изменена на «вы действительно должны ехать налево» для профиля водителя, который указывает, что водитель не только склонен игнорировать или забывать инструкции для съезда с шоссе, но также нуждается в большем внимании, так как он едет в новом районе. Голос, используемый, чтобы произнести инструкцию, может также быть изменен с мужского на женский или наоборот в случаях, когда профиль указывает, что необходимо больше внимания, так как водители, которые едут агрессивно, могут быть замедлены женским голосом. Кроме того, согласно еще одному варианту осуществления, изменяется интонация используемого голоса. Более дружественный или агрессивный тон, когда езда представляется как чувствительная ко времени дня или дню недели. Более агрессивный голос может быть полезен, когда предыдущие дополнительные инструкции не имели достаточного эффекта, так как водитель опять пропустил съезд, или когда расходы, чтобы разрешить отклонение от маршрута, являются относительно высокими. Альтернативно, может быть изменена громкость инструкции(ий). Если съезд пропущен недавно, и громкость относительно низкая, громкость может быть сделана выше. Если водитель пропускает съезды, дополнительные инструкции и звуки могут быть созданы по важным съездам. Для тех пропущенных съездов, которые являются важными в плане стоимости возврата на маршрут, т.е. необходимо проехать относительно много километров, инструкции могут быть другими (например, более громкими), чем для других менее важных съездов. Если водитель не агрессивен, и представляется, что водитель последует инструкции (такой как водитель, который ездит часто по соседству), устные инструкции могут быть пропущены. Если водитель ездил много в области местоположения своего дома, предварительные объявления (вперед, примите влево, затем примите вправо) могут быть пропущены, затем пропущены все объявления (вперед, примите влево), затем пропущены все устные инструкции.
Если водитель находится в трудных условиях вождения (например, относящийся к окружающей среде профиль указывает дождь), предварительные объявления могут быть удалены из стандартного набора инструкций 51. Если водитель чувствителен ко времени дня или дню недели (каждая пропущенная инструкция перечисляется в профиле с помощью отметки времени, таким образом, предсказание может быть сделано с помощью этой информации), даются более подробные инструкции, например, водителю, о котором известно, что он пропускает съезды ночью, зимой или в послеобеденное время по пятницам. Если водитель говорит по телефону, дополнительное внимание может быть привлечено воспроизведением, например, звука. Если водитель поворачивает налево вместо поворота направо, могут быть выданы дополнительные инструкции, чтобы акцентировать поворот налево или направо (например, «езжайте направо, ближайший поворот»).
В варианте осуществления громкость выводимой инструкции увеличивается, если профиль водителя указывает, что водитель делает телефонный звонок в момент, когда запланирована выводимая инструкция. Альтернативно, громкость может быть уменьшена, например, если профиль водителя указывает, что водитель никогда не игнорирует/забывает съезды или повороты, когда водитель делает телефонный звонок.
В варианте осуществления водитель имеет возможность отключить адаптивные инструкции по навигации, вручную выбирая это в своем пользовательском профиле. Также, если водитель думает, что система не трактует его правильным способом, может быть возможным сбросить профиль в заводские установки, получая в результате по умолчанию дружественный способ представления инструкций.
Ниже приведена серия упрощенных, но подробных примеров способа, по которому работает изобретение, со ссылкой на фиг.5 и 6 и таблицу.
Таблица показывает пример отрывка профиля водителя, которого зовут «Фил», 58 лет, мужчина, живет в Амстердаме, работает в Гааге. Фил изначально никогда не путешествовал по маршруту Амстердам-Гаага, который имеет 2 съезда с шоссе, путь обратно домой также имеет 2 съезда с шоссе, см. фиг.5.
Сценарий A: инструкции около местоположения дома или недавних пунктов назначения
Параметр водителя «водитель не хочет получать инструкции по навигации в местоположении его дома или недавнем местоположении» для каждого пункта назначения будет первоначально иметь значение 0, в результате имея «первоначальный» набор выводимых инструкций для вычисленного маршрута. После поездки на работу в течение одной недели параметр водителя, например, будет иметь значение 5×5% в день = 25. После одной недели отпуска значение может уменьшиться до 25-7×1% в день = 18%. Это значение может подниматься вплоть до 100 в течение среднего рабочего года. Будут учтены маршруты к предварительно определенному местоположению дома, так же как и маршруты до недавних пунктов назначения. Каждый пункт назначения имеет свой собственный счетчик. Будут добавляться новые пункты назначения, имеющие счетчик со значением 0.
Переводчик 48 «профиль-инструкция» может использовать значение параметра «водитель не хочет получать инструкции по навигации в местоположении его дома или недавнем местоположении», чтобы уменьшить число выводимых инструкций по сравнению с первоначальным набором выводимых инструкций.
Предварительно определенное ограничение «водитель не хочет получать инструкции по навигации в местоположении его дома» для места проживания может быть предустановленно в 30%, таким образом, как результат, вторая рабочая неделя будет иметь в результате 43%, превышающий это ограничение. Таким образом, формируется меньше инструкций, когда водитель въезжает в область своего родного города. Многоугольник карты, который определяет эту область, может быть получен из картографических данных, так как многоугольники города пункта назначения и родного города сохранены в них. Инструкции, которые должны быть пропущены, могут быть, например, «3-й съезд» после инструкции «на круговом движении поверните налево» или «вы прибыли в пункт назначения».
Если Фил потеряет несколько больше недель, тогда значение параметра «водитель не хочет получать инструкции по навигации в местоположении его дома» может медленно упасть ниже ограничения, и инструкции дома и на работе будут первоначальными, получая в результате опять больше инструкций.
Сценарий B: пропущенные съезды
В этом примере коэффициент «водитель чувствителен ко дню недели» и «водитель чувствителен ко времени дня» оба равны 0. Число пропущенных съездов первоначально равно 0. После поездки на работу в течение одной недели Фил воспользовался 20 съездами в течение этого периода и не пропустил ни одного. Таким образом, его счет пропущенных съездов все еще равен 0%.
Следующая ситуация описывает Фила после тяжелой воскресной ночной вечеринки на следующее утро в понедельник. Он пропустил съезд с шоссе, хотя он должен услышать стандартные инструкции. Теперь, как результат, параметр «водитель чувствителен ко дню недели», так же как и «водитель чувствителен ко времени дня», оба равны 100. Он пропустил 1 из 21 съездов, что имеет счет около 4%. Если на следующее утро он пропускает съезд снова, параметр «водитель чувствителен ко дню недели» устанавливается в 64, а параметр «водитель чувствителен ко времени дня» остается 100. Также он пропустил 2 из 22 съездов, что имеет счет в 9%. Здесь может существовать предварительно определенное ограничение 8%, которое позволяет алгоритму формировать адаптивные инструкции по пропущенным съездам.
Инструкции на утро во вторник были теми же, что и в понедельник, так как счет пропущенных съездов был равен только 4% в понедельник. Инструкции не адаптировались.
Инструкции на утро в среду не будут теми же, что и во вторник, так как Фил пропустил 9% съездов, что больше, чем ограничение 8%. Параметр «водитель чувствителен ко времени дня» равен 100%, в то время как предварительно определенное ограничение может быть 50%, таким образом, могут быть выданы дополнительные инструкции, такие как «воспользуйтесь съездом впереди», «после 100 метров воспользуйтесь съездом», «не забудьте здесь воспользоваться съездом».
Инструкции вечером следующего понедельника и вторника при езде дома будут теми же, что и утром этой среды, по причине того, что это понедельник или вторник, даже если это не утро. Понедельник и вторник - оба имеют счет в 1 пропущенный съезд, что в результате заканчивается счетом параметра «водитель чувствителен ко дню недели» в 64%. Для записи, если Фил также пропускает съезд в среду, тогда счет параметра «водитель чувствителен ко дню недели» падает до 47%. Это в результате уже не имеет дополнительных инструкций для пропущенных съездов.
Сценарий C: Фил едет плавно
В этом примере Фил теперь едет на свою работу в течение некоторого времени. Зная о ценах на бензин, он плавно ускорит свое транспортное средство и вовремя сбросит газ перед торможением. Ускорение измеряется в (м/с2) между периодом, когда скорость равна 0 (м/с), и первым временем, когда скорость равна 90% от максимума. Оно сохраняется как скользящее среднее с предварительно определенным числом дискретных значений, таким как 100 последовательных дискретных значений. Фил едет плавно от 0 до 50 (км/ч) около 15 секунд, производя плавное ускорение в 0,93 (м/с2). Это значение сохраняется для алгоритма скользящего среднего. Таким образом, могут быть сохранены 100 дискретных значений, и когда прибывает новое дискретное значение, самое старое будет удалено. Минимальное ограничение для агрессивности ускорения может быть 0,5 (м/с2), а максимальное ускорение может быть 5,0 (м/с2). Так как это первое дискретное значение, среднее значение Фила теперь равно 0,93. Фил будет иметь коэффициент агрессивности ускорения (0,93-0,5)/(5,0-0,5) = примерно 9%. Когда Фил склонен несколько ускориться, он может ехать со скоростью от 0 до 50 (км/ч) в течение 5 секунд, производя ускорение 2,8 (м/с2). Его среднее теперь равно примерно 1,85 (м/с2), производя новое значение параметра агрессивности ускорения в 30%.
Для использования тормозов вычисляется и обрабатывается такой же коэффициент агрессивности торможения. Ускорение будет отрицательным, но обработка значения является такой же, что и для вышеуказанного параметра агрессивности ускорения. Здесь предполагается, что Фил использует тормоза тем же образом, что и педаль газа, получая в результате агрессивность торможения 30%.
Для поворотов дороги, каждый поворот более чем в 30 градусов, скорость и радиус поворота измеряется и преобразуется в центростремительное ускорение в (м/с2) и также сохраняется в скользящем среднем значении. Фил экономит на своих затратах на техническое обслуживание и ремонт, касающиеся его резиновых шин, проезжая повороты плавно. Участок дороги с круговым движением с радиусом 70 (м) (получено из картографических данных) проезжается при езде в Амстердаме со скоростью 50 (км/ч). Это имеет в результате центростремительное ускорение 2,8 (м/с2). Минимальное ограничение для агрессивности ускорения может быть определено как 1 (м/с2), а максимальное ограничение может быть определено как 10 (м/с2), таким образом, Фил имеет значение параметра агрессивности поворота (2,8-1)/(10-1)=20%. Если он едет с той же скоростью по участку дороги с круговым движением небольшого 35(м) радиуса, то он будет иметь счет 50%. Эти значения сохраняются в скользящем среднем и могут быть приняты во внимание позже.
Применение трех коэффициентов агрессивности Фила (ускорение, торможение и скользящее среднее ускорения на повороте) существует, чтобы классифицировать текущего водителя как «спокойного», «нормального» или «агрессивного» в зависимости от среднего значения обоих коэффициентов. Нижний диапазон значения для коэффициента агрессивности может быть 0%-30% для спокойных водителей, средний диапазон может быть 30%-70% для «нормальных» водителей и верхний диапазон может быть 70%-100% для «раздраженных» водителей. Фил будет классифицирован как «спокойный» водитель с его средним значением в 27% от коэффициента агрессивности ускорения в 30%, агрессивности торможения в 30% и коэффициента агрессивности ускорения на повороте в 20%.
Существуют некоторые исключения, в таком случае среднее значение Фила не будет затронуто. Когда компонент 46 построения профиля, относящегося к окружающей среде профиля, указывает компоненту 44 построения профиля водителя, что текущие условия дорожного движения являются «оживленными», или дорожные условия являются «скользкими», или погодные условия являются «штормовыми», измеренное значение может не обрабатываться. Причина, стоящая за этим, в том, что это - не нормальное поведение, а поведение, вызванное влиянием внешних раздражителей. При построении персонального профиля водителя внешние раздражители должны оказывать минимальное влияние на эти значения. Также, когда GPS-покрытие и точность ниже определенных приемлемых ограничений, профиль водителя не изменяется, когда может ожидаться, что это «наблюдаемое поведение» вызвано ошибкой плохого позиционирования GPS-приемника 23.
В заключение, классификация Фила как «спокойного водителя» (т.е. относительно низкий коэффициент агрессивности) приведет к другим следующим инструкциям по навигации. Когда Фил не спешит или не едет агрессивно, он может захотеть, чтобы инструкции для него объявлялись определенное количество раз, чтобы иметь время среагировать на эти инструкции. Например, стандартная инструкция для того, чтобы покинуть шоссе, «после 800 метров воспользуйтесь съездом» может быть объявлена как «воспользуйтесь съездом впереди», «используйте правую полосу движения для съезда» или «съезд впереди, пожалуйста, замедлитесь вовремя и займите правую полосу». Также при приближении к участку дороги с круговым движением Филу может быть выдана дополнительная инструкция «вы можете безопасно использовать правую полосу» в дополнение к: «по дороге с круговым движением, поверните налево, 3-й съезд». Если Фил имеет «нормальную» классификацию, изменения инструкций не будет применяться. Если Фил водит согласно классификации «агрессивный», он получит меньше инструкций, так как они не могут быть произнесены вслух в течение короткого времени между приближением и достижением определенной точки для инструкции. Филу могут понадобиться короткие и ясные инструкции типа «езжайте налево через 100 метров», «круговое движение, поверните налево» при «агрессивной» езде.
Сценарий D: Фил игнорирует определенную инструкцию в определенном месте
Фил любит ездить вдоль реки в своем родном городе, таким образом, когда он направляется в некоторый пункт назначения, он предпочитает маршрут, который проходит в течение некоторого времени, вдоль реки, если он не занимает слишком много дополнительного времени. Это означает, что каждый день Фил снова игнорирует некоторые инструкции по навигации в одном и том же месте. Это занимает только несколько минут и несколько лишних сотен метров. В примере он едет на работу, а предлагаемой инструкцией является езда прямо по круговому движению, см. фиг.5. Фил любит прибрежный маршрут и едет направо по круговому движению. Число раз игнорирования этой отдельной инструкции в этом отдельном местоположении подсчитывается. Когда это число превышает некое предварительно определенное ограничение, такое как 10 раз, местоположение помечается, чтобы предположить, что оно имеет разумную альтернативу. Эта пометка будет выполнена только тогда, когда дополнительное время, необходимое для объезда, меньше, чем предварительно определенное ограничение в 10% дополнительного времени или дополнительного расстояния. В следующий раз, когда Фил едет на работу, он получит те же инструкции на экране, но они не будут произнесены вслух при приближении к круговому движению, так как Фил, вероятно, проигнорирует их. Он будет только раздражен инструкцией, так как он имеет свое персональное предпочтение для этого небольшого отклонения.
Согласно варианту осуществления каждая базовая инструкция преобразуется в K выводимых инструкций, где K>=0 и K зависит от данных в одном или более профилях. Если K=0, это означает, что базовая инструкция удалена. Если K=1, это означает, что базовая инструкция преобразуется в одну выводимую инструкцию. Если K>1, это означает, что базовая инструкция преобразуется в одну или более выводимых инструкций. Этот вариант осуществления теперь будет обсужден с помощью примера. Пример будет обсужден со ссылкой на фиг.6, на котором маршрут 60 изображен от пункта А отправления до пункта B назначения в Амстердаме. Маршрут 80 от A до B вычисляется модулем 41 вычисления маршрута и отправляется модулю 42 инструкций как набор данных, описывающий векторы дорог и координаты. Модуль 42 инструкций будет использовать набор данных, чтобы создать набор базовых инструкций. В этом примере набор базовых инструкций может выглядеть так:
- НАЧАЛО
- 20 м НАПРАВО
- 300 м РАЗВОРОТ
- 230 м НАПРАВО
- 900 м НАЛЕВО
- 150 м НАПРАВО
- 55 м НАПРАВО
- 75 м ФИНИШ
- ОСТАНОВКА.
Этот набор базовых инструкций 51 извлекается из маршрута 80 и картографических данных и содержит не инструкции человеку, а более короткую форму описания маршрута 80. Переводчик 48 «профиль-инструкция» переводит базовые инструкции в выводимые инструкции, см. стрелку 57 на фиг.4. Чтобы перевести (т.е. преобразовать) базовые инструкции, возможные инструкции человеку, сохраненные в базе 70 данных, объединяются с базовыми инструкциями. В этом примере выводимые инструкции, сформированные переводчиком 48 «профиль-инструкция» с течением времени и ограниченные путем отделения направления от расстояния, которое необходимо преодолеть, являются, по меньшей мере, следующими:
- поверните направо;
- сделайте разворот;
- поверните направо;
- поверните налево;
- поверните направо;
- поверните направо;
- пункт назначения достигнут.
Как может быть видно в верхней части фиг.6, маршрут 80 непосредственно изгибается вправо без пересечения. Водитель может прийти в замешательство, когда не существует инструкции для этого поворота. Однако навигационное устройство 10 может не выдать выводимые инструкции для этих «обычных поворотов», так как они существуют в базовых инструкциях «поверните направо» и «поверните налево». Также эти обычные повороты могут быть указаны (K>1) в зависимости от профилей водителей. Также дополнительные (т.е. K>1) инструкции могут быть выданы для водителей, имеющих, например, профиль водителя с низким коэффициентом агрессивности. Так как эти водители любят ездить безопасно и, вероятно, захотят получать настолько много инструкций, насколько возможно. Также, это водитель, имеющий относительно большой возраст (например, возраст >60), или водители, которые любят избегать рисков (водители, которые могут быть классифицированы как «спокойные» водители). В этом примере выводимые инструкции могут выглядеть так:
- (сейчас) поверните направо;
- (поверните здесь направо, следуйте по дороге);
- (поверните опять направо, просто езжайте по дороге);
- после 200 метров сделайте разворот (затем в конце дороги поверните направо);
- (сейчас) сделайте разворот (затем в конце дороги поверните направо);
- в конце дороги поверните направо (затем оставайтесь на левой полосе движения);
- (сейчас) поверните направо (затем оставайтесь в левой полосе движения);
- (впереди поворот налево);
- после 200 метров поверните налево, затем поверните направо;
- поверните налево (затем поверните направо);
- поверните направо (затем поверните направо);
- поверните направо (затем, вы прибыли в пункт назначения);
- вы прибыли в пункт назначения.
Вышеуказанный текст между скобками дается водителю, который имеет большое значение параметра «процент съездов, игнорированных водителем» или большое значение для параметра «процент поворотов, где водитель свернул направо вместо поворота налево или наоборот».
Могут быть вставлены дополнительные инструкции (K>1) для водителя, который имеет даже более высокое значение параметра «процент съездов, игнорированных водителем» или даже более высокое значение для параметра «процент поворотов, где водитель свернул направо вместо поворота налево или наоборот» в его водительском профиле:
- (вы должны) повернуть направо (здесь).
Дополнительные инструкции для водителей, которые представляются запутанными левым и правым поворотом, что указано высоким (например, >80) значением параметра «процент поворотов, где водитель свернул направо вместо поворота налево или наоборот» - это:
- в Европе: поверните направо (это крутой поворот);
- в Великобритании: поверните направо (это пологий поворот);
- в Европе: поверните налево (это пологий поворот);
- в Великобритании: поверните налево (это крутой поворот).
Поскольку конкретные варианты осуществления изобретения были описаны выше, следует признать, что изобретение может быть осуществлено на практике другими способами, чем были описаны. Например, изобретение может принимать форму вычислительной программы, содержащей одну или множество последовательностей машиночитаемых инструкций, описывающих способ, раскрытый выше, или носителя хранения данных (например, полупроводниковая память, магнитный или оптический диск), имеющего подобную вычислительную программу, сохраненную на нем. Как следует понимать специалистам в данной области техники, все программные компоненты также могут быть реализованы в виде аппаратных компонентов.
Вышеприведенные описания рассматриваются в качестве иллюстративных, а не ограничивающих. Таким образом, для специалистов в данной области техники очевидно, что могут быть реализованы модификации описанного изобретения без отступления от границ формулы изобретения, приведенной ниже.
Изобретение относится к области приборостроения и может найти применение в навигационных системах, в которых инструкции по навигации приспосабливаются к предпочтениям водителя. Технический результат - расширение функциональных возможностей. Для достижения данного результата введены адаптивные модули и связи между ними, позволяющие совмещать текущие сведения о дорожном движении, погоде и времени, с информацией о манере вождения конкретного водителя. Эта информация используется в процессе формирования профиля конкретного водителя. Этот профиль водителя используют для адаптации навигационных инструкций. Предоставление адаптивных инструкций конкретному водителю может содействовать более безопасному дорожному движению. 4 н. и 15 з.п. ф-лы, 6 ил., 1 табл.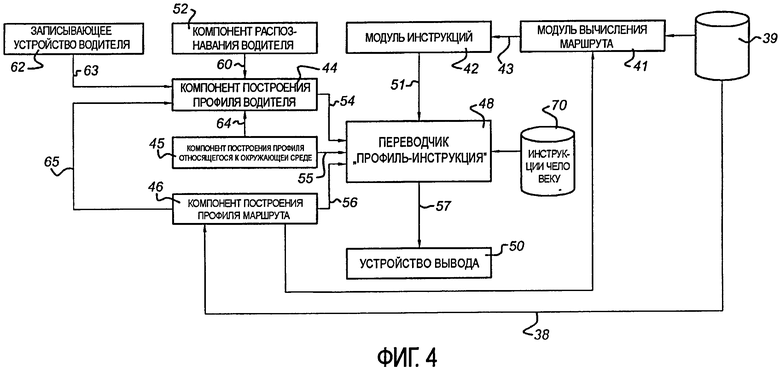
1. Навигационное устройство (10), выполненное с возможностью выдавать инструкции по навигации водителю транспортного средства, упомянутое устройство содержит
модуль (41) вычисления маршрута, который выполнен с возможностью определять маршрут от пункта отправления до пункта назначения;
модуль (42) инструкций, выполненный с возможностью создавать набор базовых инструкций для водителя с тем, чтобы позволять водителю двигаться по определенному маршруту, и
модуль (44, 45, 46) профиля, выполненный с возможностью выстраивать, по меньшей мере, один профиль, характеризующееся тем, что навигационное устройство (10) содержит
переводчик (48) "профиль-инструкция", выполненный с возможностью адаптировать каждый набор базовых инструкций по навигации, сформированных в качестве части планирования маршрута в зависимости от упомянутого, по меньшей мере, одного профиля, причем адаптация, выполняемая с учетом каждой базовой инструкции, представляет собой, по меньшей мере, одну, выбранную из группы, состоящей из удаления, изменения и накапливания таким образом, чтобы во время навигации предоставлять вместо первоначальной базовой инструкции, относительно которой выполнялась указанная адаптация, ноль (инструкции отсутствуют) или более выходных инструкций.
2. Навигационное устройство по п.1, в котором упомянутый переводчик "профиль-инструкция" выполнен с возможностью определять голос, используемый, чтобы произнести выводимую инструкцию, в зависимости от упомянутого, по меньшей мере, одного профиля.
3. Навигационное устройство по п.1, в котором упомянутый переводчик "профиль-инструкция" выполнен с возможностью определять громкость, используемую, чтобы произнести выводимую инструкцию, в зависимости, по меньшей мере, от одного профиля.
4. Навигационное устройство по п.1, в котором изменение включает в себя изменение момента времени выдачи выводимой инструкции в зависимости, по меньшей мере, от одного профиля.
5. Навигационное устройство по п.1, в котором упомянутый переводчик "профиль-инструкция" выполнен с возможностью определять расстояние между точкой, в которой выводимая инструкция выдается, и точкой маршрута, ассоциативно связанной с выводимой инструкцией, в зависимости от упомянутого, по меньшей мере, одного профиля.
6. Навигационное устройство по п.1, в котором упомянутый модуль профиля содержит компонент (44) построения профиля водителя, выполненный с возможностью выстраивать профиль водителя, содержащий параметры водителя.
7. Навигационное устройство по п.6, в котором упомянутый компонент (44) построения профиля водителя выполнен с возможностью выстраивать упомянутый профиль водителя, адаптируя предварительно заданный профиль водителя.
8. Навигационное устройство по пп.6-7, при этом упомянутый профиль водителя содержит, по меньшей мере, одно из следующего:
домашний адрес,
ID водителя,
дата рождения,
для множества предварительно определенных областей число раз, которое административная область была посещена,
число раз, которое водитель ездил до определенных пунктов назначения,
процент съездов, проигнорированных водителем,
процент поворотов, где водитель повернул влево для поворота направо или наоборот,
степень агрессивности,
номер мобильного телефона,
водитель делает телефонный вызов в момент, когда выводимая инструкция запланирована в недалеком будущем,
уровень сложности условий вождения,
водитель не хочет инструкции по навигации в местоположении его собственного дома или в недавнем пункте назначения, приспособлено для каждого пункта назначения,
чувствительность водителя к текущему дню недели,
чувствительность водителя ко времени дня.
9. Навигационное устройство по п.8, при этом упомянутое навигационное устройство (10) содержит записывающее устройство (62) водителя, выполненное с возможностью записывать, по меньшей мере, один параметр манеры вождения водителя и отправлять упомянутый, по меньшей мере, один параметр упомянутому компоненту (44) построения профиля водителя.
10. Навигационное устройство по п.9, при этом упомянутые параметры манеры вождения водителя содержат, по меньшей мере, одно из следующих:
коэффициент ускорения, равный скользящему среднему значению ускорения транспортного средства, поделенному на предварительно определенное максимальное ускорение;
коэффициент торможения, равный скользящему среднему значению торможения транспортного средства, поделенному на предварительно определенное максимальное торможение;
коэффициент агрессивности прохождения поворота, равный скользящему среднему значению ускорения в повороте во время поворота, поделенный на предварительно определенное максимальное ускорение в повороте;
число раз, которое водитель проезжает в отдельной административной области.
11. Навигационное устройство по п.1, при этом навигационное устройство выполнено с возможностью каждый раз, когда водитель игнорирует выводимую инструкцию, сохранять данные, по меньшей мере, по одному местоположению и времени в списке неясных местоположений.
12. Навигационное устройство по п.1, в котором упомянутый модуль профиля содержит компонент (45) построения профиля, относящегося к окружающей среде, выполненный с возможностью выстраивать профиль, относящийся к окружающей среде, содержащий параметры, относящиеся к окружающей среде.
13. Навигационное устройство по п.12, при этом упомянутые относящиеся к окружающей среде параметры содержат погодные условия.
14. Навигационное устройство по п.12, при этом упомянутые относящиеся к окружающей среде параметры содержат дорожные условия.
15. Навигационное устройство по п.1, в котором упомянутый модуль профиля содержит компонент (46) построения профиля маршрута, выполненный с возможностью выстраивать профиль маршрута, содержащий условия дорожного движения предварительно определенного маршрута.
16. Навигационное устройство по п.1, при этом упомянутое навигационное устройство содержит компонент (52) распознавания водителя, выполненный с возможностью распознавать водителя, когда пользователь сидит за рулем автомобиля.
17. Транспортное средство, содержащее навигационное устройство (10) по любому одному из предшествующих пунктов.
18. Способ предоставления указаний по навигации с помощью навигационного устройства, содержащий этапы, на которых
определяют маршрут от пункта отправления до пункта назначения;
создают набор базовых инструкций для пользователя с тем, чтобы позволить пользователю двигаться по определенному маршруту, и
выстраивают, по меньшей мере, один профиль, характеризующийся этапом, на котором адаптируют каждый набор базовых инструкций по навигации, сформированных в качестве части планирования маршрута в зависимости от упомянутого, по меньшей мере, одного профиля, причем адаптация, выполняемая с учетом каждой базовой инструкции, представляет собой, по меньшей мере, одну выбранную из группы, состоящей из удаления, изменения и накапливания, таким образом, чтобы во время навигации предоставлять вместо первоначальной базовой инструкции, относительно которой выполнялась указанная адаптация, ноль (инструкции отсутствуют) или более выходных инструкций.
19. Носитель данных, содержащий одну или более последовательностей машиночитаемых инструкций, предназначенных для выполнения способа предоставления указаний по навигации с помощью навигационного устройства по п.18.
| US 5177685 А, 05.01.1993 | |||
| ЕР 1530025 А2, 11.05.2005 | |||
| US 2005246096 A1, 03.11.2005 | |||
| Устройство для измерения развала и схода колес автомобиля | 1979 |
|
SU973011A3 |

