Предлагаемое изобретение относится к области структурного распознавания образов и может быть использовано в автоматизированных системах оперативной диагностики технического и функционального состояний многопараметрического объекта по данным измерительной информации, а также в системах идентификации, распознавания, контроля и диагностики технического и функционального состояния в энергетике.
Существует способ оперативной диагностики состояний многопараметрического объекта по данным измерительной информации [см. кн. Электрические измерения. / Под ред. Е.Г.Шрамкова. - М.: Высшая школа, 1972. - С.496], на основе поступающей множественной информации об исследуемом объекте. Способ заключается в обработке поступающей множественной измерительной информации с последующим формированием логических заключений или обобщенных данных с использованием вычислительных средств, а также формированием рекомендаций оператору по диагностике исследуемого объекта.
Недостатками этого способа являются отсутствие эффективной визуализации состояния функционирования объекта, невозможность наблюдения комплексной картины состояния многопараметрического объекта, вследствие чего невозможно эффективно выполнять функцию параллельного контроля всех переменных состояния функционирования.
Существует способ оперативной диагностики состояний многопараметрического объекта [см. кн. Теория автоматического управления. / Под ред. Ю.М.Соломенцева. - М.: Высшая школа, 2000. - С.203-205]. Способ заключается в оценке оператором качественных и количественных характеристик измеряемых величин и получении от системы рекомендаций по необходимым к выполнению действиям по заранее созданным алгоритмам из пополняемой библиотеки программ.
Недостатками этого способа являются низкая оперативность в выполнении команд и процедур, необходимых для оценки работы системы и ее коррекции, дорогостоящее программное и аппаратное обеспечение и сложность комплексной оценки поступающей информации, представляемой в разнородной форме.
За прототип принят способ оперативной диагностики состояний многопараметрического объекта по данным измерительной информации [см. патент № 2125294 (РФ), ПМК G08C 15/06, G06F 7/00, опубликован 1999.01.20], заключающийся в оперативном обнаружении изменения динамического состояния многопараметрического объекта, отображающегося на экране видеомонитора в виде когнитивной кодовой матрицы состояний. Состояние измерительного параметра представляют в цветовом коде видимого спектра, а весь поток измерительной информации отображают на экране нескольких многоцветных видеомониторов в виде цветокодовой матрицы-диаграммы. Используется принцип причинно-следственных зависимостей, происходящих во времени в объекте процессов, отображаемых параметрами, что позволяет по виду цветокодовой матрицы-диаграммы оценить динамику изменения анализируемых процессов с выявлением последовательности их взаимовлияния при переходе из одного состояния в другое.
Недостатками прототипа являются отсутствие энергетической эффективности оборудования с минимумом затрат энергии, микросхемотехники из-за невозможности автоматического принятия решений, в том числе в масштабе реального времени и реализации адаптивных управляющих воздействий по результатам анализа цветокодовой матрицы состояний исследуемого объекта с минимумом затрат энергии, рассредоточение диагностической информации на нескольких средствах отображения.
Технической задачей способа является повышение энергетической эффективности оборудования с минимумом затрат энергии, микросхемотехники, а именно снижение затрат на аппаратное и программное обеспечение системы диагностики и минимизация влияния субъективного фактора при оперативном обнаружении изменения состояния многопараметрического объекта, отображающегося на экране видеомонитора, возможность автоматического принятия решений и реализация адаптивных управляющих воздействий по результатам анализа цветокодовой матрицы состояний исследуемого объекта с минимумом затрат энергии по данным диагностической информации.
Поставленная техническая задача достигается тем, что в способе оперативной диагностики состояний многопараметрического объекта по данным измерительной информации, заключающемся в оперативном обнаружении изменения состояния многопараметрического объекта, отображающегося на экране видеомонитора в виде когнитивной кодовой матрицы состояний {Ф}={L1*L2}, в отличии от прототипа, графический образ когнитивный матрицы формируют в адресном пространстве постоянного запоминающего устройства тождественно образам эквивалентов множества состояний оптимального управления, которые находят априори из полного анализа процессов динамики оптимального управления объектом, описываемый моделью двойного интегратора, а затем используют для синтеза в масштабе реального времени энергосберегающих управляющих воздействий при любых изменениях динамических состояний объекта, которые отражают адреса точек диагностики соответствующего образа эквивалентов, где L1 - множество управляющих воздействий, L2 - меры оценки затрат на управление.
Сущность предлагаемого оперативной диагностики состояний многопараметрического объекта по данным измерительной информации (см. фиг.1-3) заключается в оперативном обнаружении изменения состояния многопараметрического объекта, отображающегося на экране видеомонитора в виде когнитивного образа множества состояний оптимального управления {Ф}={L1*L2} (фиг.1).
Для повышения энергетической эффективности оборудования с минимумом затрат энергии, микросхемотехники, когнитивный графический образ (фиг.1) формируют в адресном пространстве постоянного запоминающего устройства (ПЗУ) в виде образов эквивалентов множества состояний оптимального управления, которые находят априори из полного анализа процессов динамики оптимального управления объектом, описываемой моделью двойного интегратора. Образы эквивалентов в коде используют для синтеза в масштабе реального времени энергосберегающих воздействий при любых изменениях динамических состояний объекта, которые отражают адреса точек диагностики соответствующего образа эквивалентов, где L1 - множество управляющих воздействий, L2 - меры оценки затрат на управление. Это позволяет исключить процедуру анализа оптимального управления в реальном масштабе времени, тем самым значительно упростить работу энергетической системы и понизить требования к техническим и программным средствам, реализующим управление.
Поясним предлагаемый способ на примере оптимального управления динамическим процессом электрооборудования.
Процесс динамики электрических нагревателей и электродвигателей может быть описан дифференциальным уравнением
где z представляет собой фазовую координату, параметр b - коэффициент усиления управляющего воздействия u(t).
Для определения оптимальных управляющих воздействий u*, реализующих оптимальное энергосберегающее управление по переводу объекта из начального состояния z0 в конечное zk, необходима сложная двухэтапная процедура, состоящая из анализа и синтеза оптимального управления в реальном масштабе времени.
Получаемые результаты анализа оптимального управления на множестве состояний функционирования служат основой базы знаний для широкого круга задач разработки алгоритмического обеспечения систем энергосберегающего управления различными динамическими объектами. Для выполнения процедуры анализа оптимального управления автоматически или оператором вводятся исходные данные для решения задачи, представленные в виде массива реквизитов

Результатом анализа является получение когнитивного образа множества состояний оптимального управления {Ф}={L1*L2}, на котором показаны области существования управлений (фиг.1).
Вид минимизируемого функционала сохраняется на всем временном интервале управления


управляющее воздействие на заданном временном интервале ограничено

где uн - нижний порог управляющего воздействия; uв - верхний порог управляющего воздействия.
Следовательно, управление ограничено, в каждый момент времени, концы траектории изменения фазовых координат закреплены и временной интервал фиксирован.
Анализ оптимального управления охватывает широкий круг задач, связанных с исследованиями вопросов существования решения, устойчивости, определения возможных видов функций оптимального управления и множество других задач. Выполнение процедуры анализа оптимального управления требует сложных алгоритмических и математических расчетов и, как следствие, дорогостоящих высокопроизводительных микропроцессорных технических средств. Это является препятствием к оперативному выбору оптимальной управляющей функции в масштабе реального времени.
Из полученных на основе полного анализа областей (фиг.1), областями для которых существует оптимальное управление, будут являться области I, II, III, IV, V, VI.VII.
Синтез управляющих воздействий осуществляется по результатам полного анализа проведенного априори и представленного в виде когнитивного образа множества состояний оптимального управления {Ф}={L1*L2}, сформированного в адресном пространстве кодовой матрицы Li*L2 ПЗУ устройства управления, по массиву исходных данных реквизитов задачи оптимального управления (2).
В результате процедуры синтеза оптимального управления определяем область на фиг.1, в которую попадает точка S с координатами (L1, L2). Каждой области соответствует определенный вид функции управления.
В случае если оптимальное управление не найдено, т.е. координаты точки S=(L1, L2) не принадлежат областям I-VII когнитивного графического образа, то осуществляется автоматический или ручной перевод устройства управления из оптимального в традиционный для многопараметрического объекта режим функционирования.
В зависимости от требований к функционированию энергетической установки оператор, используя в процессе диагностики когнитивный образ {Ф}={L1*L2}, представленный в виде цветокодовой матрицы L1*L2 состояний объекта, может как самостоятельно, в зависимости от состояния функционирования, выбирать функцию управления, так и переводить систему в автоматический режим при любых изменениях состояния функционирования.
Докажем эффективность предлагаемого способа оперативной диагностики состояний многопараметрического объекта по данным измерительной информации относительно прототипа. К наиболее энергоемким объектам относятся тепловые аппараты, машины с электроприводами, т.е. большинство видов технологических установок в машиностроительной, химической, металлургической, строительной и других отраслях промышленности. Одним из направлений повышения эффективности функционирования энергетических установок является снижение затрат энергии при любых изменениях состояний их функционирования и условий процесса.
Теоретические исследования и практические результаты показывают, что при оптимальном управлении уменьшение затрат энергии может достигать от 5% до 40% по сравнению с традиционно используемыми управляющими воздействиями [см. Аджиев М.Э. Энергосберегающие технологии. - М.: Энергоатомиздат, 1990. 64 с.; Аракелов В.Е., Кремер А.И. Методические вопросы экономии энергоресурсов. - М.: Энергоатомиздат, 1990. 188 с., Кириллкин В.А. Энергетика. Главные проблемы. М.: Энергетика, 1985. 87 с., Рэй Д. Экономия энергии в промышленности. / Пер. с англ. М., 1985. 212 с.]. Кроме того, в динамических режимах, с минимумом затрат энергии, снижаются механические и тепловые нагрузки, что ведет к повышению долговечности и безопасности эксплуатации энергетических объектов.
Значительно более простая процедура задания массива исходных данных задачи оптимального управления позволяет визуализировать получаемую функцию управления в зависимости от выбранного состояния функционирования объекта, что позволяет более эффективно осуществлять диагностику объекта, а также реализовать энергосберегающее управление объектом. В качестве примера рассмотрим перевод теплового объекта - нагревательного элемента из начального состояния z0, в конечное zk за время Δt

с минимумом затрат энергии, где t0 - начальное время управления, t1 - время, при котором объект выходит в рабочий режим при традиционном управлении.
Массив реквизитов для анализа энергосберегающего управления приведен в таблице 1.
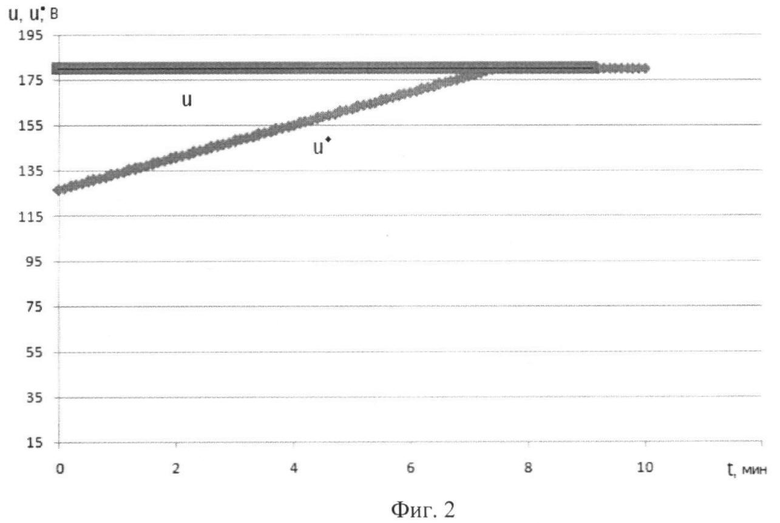
IЭ - функционал (лимит) затрат энергии при традиционном управлении (фиг.2, кривая u).
Следовательно, задача заключается в определении такого управления, которое обеспечит перевод объекта из начального состояния в конечное с минимумом затрат энергии (3).
В результате проведения полного анализа процессов динамики оптимального управления получаем цветокодовую матрицу в виде образов эквивалентов множества состояний оптимального управления (фиг.1).
Далее когнитивный графический образ кодовой матрицы формируют в адресном пространстве постоянного запоминающего устройства тождественно образам эквивалентов множества состояний оптимального управления.
На следующем этапе осуществляется операция синтеза, в результате чего получаем координаты точки S (фиг.1, таблица 2) и в соответствии с ее координатами осуществляется выбор вида функции управления и ее синтез (фиг.2, кривая u*, таблица 3).
Вид функции оптимального управления для состояния объекта в полученной точке S будет определяться следующей системой уравнений
где параметры d0=126,60, d1=7,11, время переключения функций управления tп=7,5 мин.
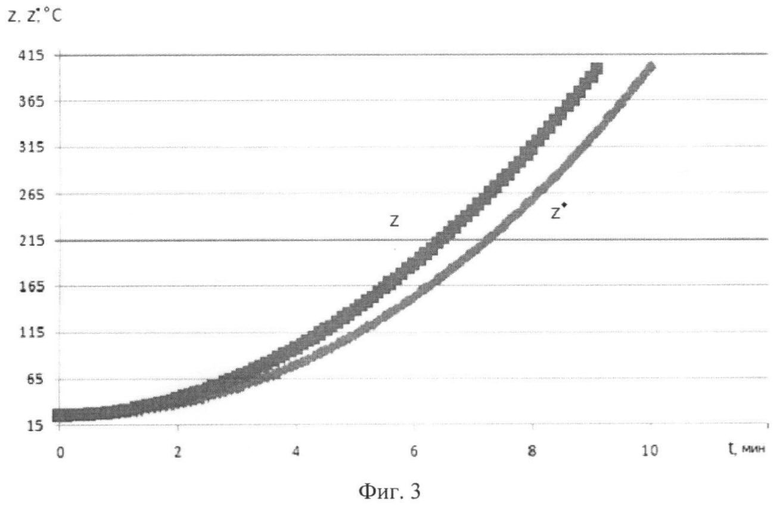
На фиг.3 и в таблице 3 приведены зависимости, отображающие изменение температуры нагревательной системы при традиционном и оптимальном энергосберегающем управлении.
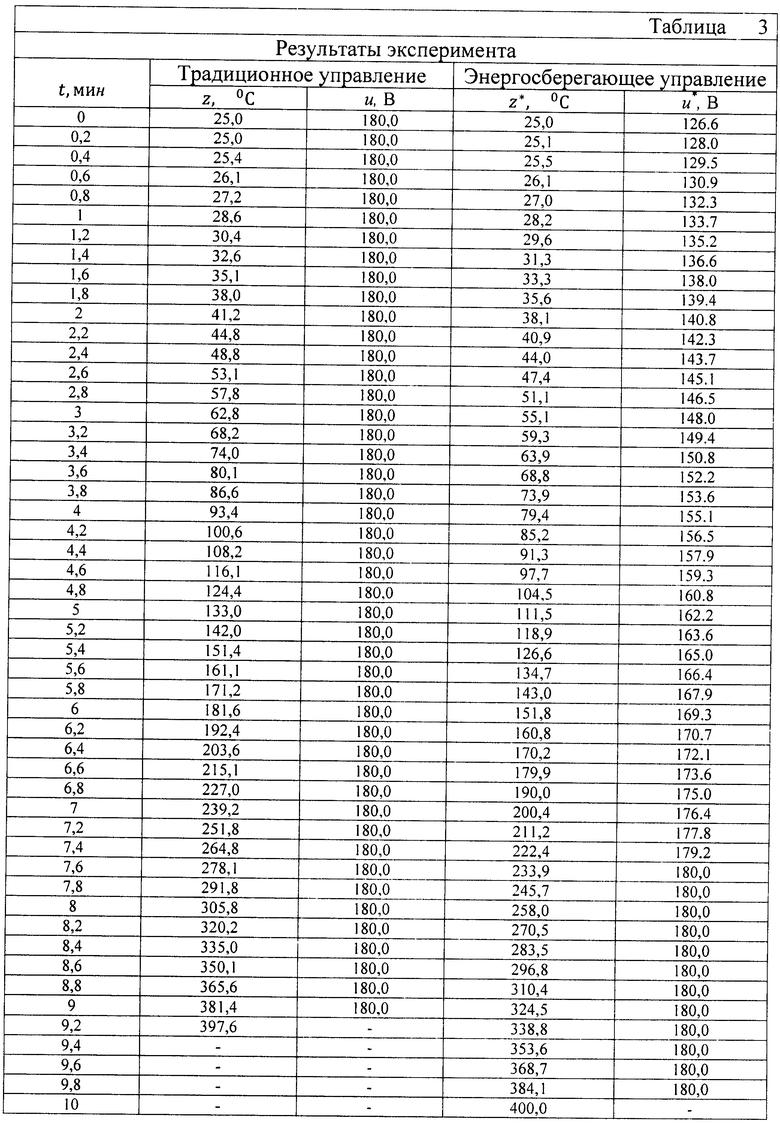
Таким образом, используя свойство инерционности объекта и несколько большее время нагрева при энергосберегающем управлении, получаем функционал затрат энергии I=259111, что при сравнении с функционалом затрат энергии стандартного управления IЭ соответствует экономии электроэнергии равной 13,07%

Используемый способ оперативной диагностической информации состояний многопараметрического объекта по данным измерительной информации позволяет значительно упростить требования к системе диагностики и управления динамическими режимами энергетического оборудования за счет того, что сложная процедура анализа оптимального управления производится априори, в результате чего когнитивный графический образ множества состояний оптимального управления записывается в постоянное запоминающее устройство, и не требуется его определение в процессе диагностики и управления.
Реализация предлагаемого способа осуществлена с использованием микропроцессорного контроллера ZILA и построена на базе экспертной системы энергосберегающего управления, автоматизированного рабочего места разработчика систем энергосберегающего управления. Информация о координатах точки в пространстве синтезирующих переменных и выбранном в соответствии с этим видом управления выводится на встроенный экран микропроцессорного контроллера или цветной видеомонитор оператора автоматизированного рабочего места.
Таким образом, предлагаемый способ благодаря формированию когнитивного графического образа кодовой матрицы в адресном пространстве постоянного запоминающего устройства в виде нормируемых эквивалентов множества состояний оптимального управления, которые находят априори из полного анализа процессов динамики оптимального управления объектом, а затем данный образ используют для синтеза в масштабе реального времени энергосберегающих управляющих воздействий, в отличии от известных решений, экономит электроэнергию от 5 до 40%, что повышает энергетическую эффективность оборудования с минимумом затрат энергии. Это позволяет снизить затраты на аппаратное обеспечение системы управления, вследствие пониженных требований к быстродействию системы, конфигурации микросхемотехники, а также свести к минимуму влияние субъективизма при принятии решений, сделать возможным процедуру автоматического принятия решений за счет реализации адаптивных управляющих воздействий по результатам анализа когнитивного образа состояний исследуемого объекта с минимумом затрат энергии.
Изобретение относится к измерительной технике, в частности к отображению диагностической информации управления технологическим оборудованием. Когнитивный графический образ кодовой матрицы формируют в адресном пространстве постоянного запоминающего устройства в виде образов эквивалентов множества состояний оптимального управления. Данный образ затем используется для синтеза в масштабе реального времени энергосберегающих управляющих воздействий технологическим оборудованием, с учетом изменений состояний функционирования и условий процесса. Техническим результатом способа является повышение энергетической эффективности технологического оборудования с минимумом затрат энергии, микросхемотехники, снижение затрат на аппаратное обеспечение системы управления, минимизация влияние человеческого фактора в процессе принятия решений, возможность автоматического принятия решений и реализации сложных управляющих воздействий по результатам анализа цвето-кодовой матрицы состояний исследуемого объекта с минимумом затрат энергии. 3 ил., 3 табл.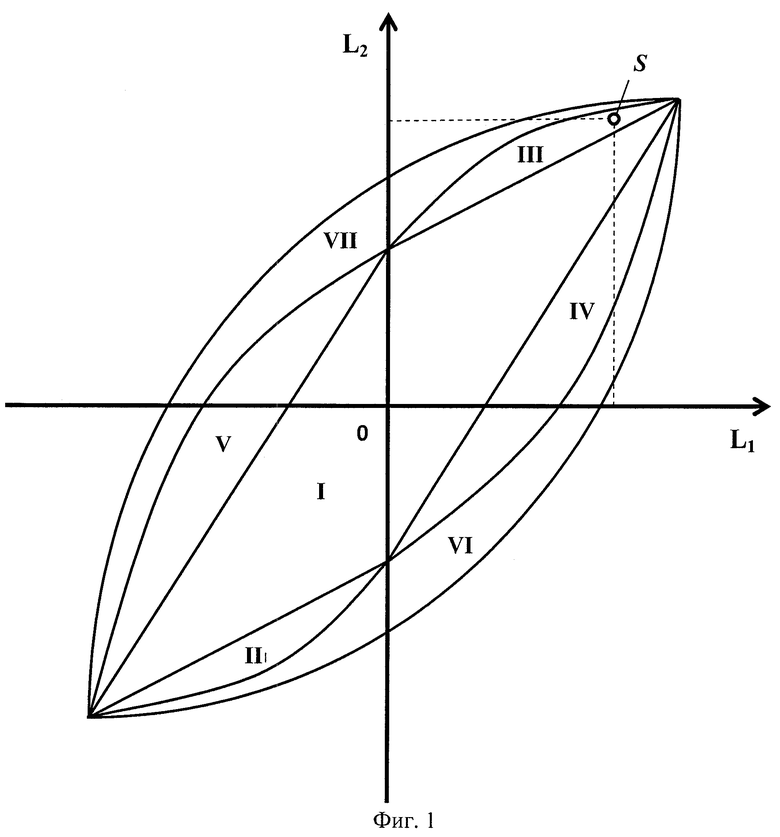
Способ оперативной диагностики состояний многопараметрического объекта по данным измерительной информации, заключающийся в оперативном обнаружении изменения состояния многопараметрического объекта, отображающегося на экране видеомонитора в виде когнитивной кодовой матрицы состояний {Ф}={L1·L2}, отличающийся тем, что графический образ когнитивный матрицы формируют в адресном пространстве постоянного запоминающего устройства тождественно образам эквивалентов множества состояний оптимального управления, которые находят априори из полного анализа процессов динамики оптимального управления объектом, описываемый моделью двойного интегратора, а затем используют для синтеза в масштабе реального времени энергосберегающих управляющих воздействий при любых изменениях динамических состояний объекта, которые отражают адреса точек диагностики соответствующего образа эквивалентов, где L1 - множество управляющих воздействий, L2 - меры оценки затрат на управление.
| RU 97118820 А, 20.08.1999 | |||
| Триангуляционная вышка | 1930 |
|
SU19335A1 |
| CN 101256848, 03.09.2008 | |||
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ОБ ОБЪЕКТАХ КОНТРОЛИРУЕМОГО ДИСПЕТЧЕРСКОГО КРУГА | 1996 |
|
RU2107940C1 |

