Предлагаемое изобретение относится к области оптимального управления динамическими объектами и может быть использовано в системах энергосберегающего управления динамическими объектами, электроприводами на основе двигателей постоянного и переменного тока, химико-технологическими процессами.
Существуют способ и система оптимального управления объектами [см. кн. Теория автоматического управления / Под ред. Ю.М.Соломенцева. - М.: Высшая школа, 2000. - С.206], на основе комплекса программ иерархической структуры, под общим контролем управляющей программы. Способ заключается в синтезе управляющих воздействий на основе расчетов производимых комплексом программ по заданной оператором команде. Управляющая программа определяет очередность выполнения программ и подпрограмм и руководит загрузкой устройств ЭВМ.
Недостатками этого способа и системы являются отсутствие функции синтеза в реальном масштабе времени энергосберегающих управляющих воздействий, сложная программная и аппаратная реализация заложенных алгоритмов управления объектом.
Существуют способ и система оптимального управления объектами [см. кн. Теория автоматического управления / Под ред. Ю.М.Соломенцева. - М.: Высшая школа, 2000. - С.207]. Способ заключается в прямом цифровом преобразовании. ЭВМ непосредственно вырабатывает оптимальные управляющие воздействия и с помощью соответствующих преобразователей передает команды на исполнительные механизмы, за счет чего реализуются оптимизирующие функции и адаптация к изменению переменных состояния объекта.
Недостатками этого способа и системы являются отсутствие функции синтеза в реальном масштабе времени энергосберегающих управляющих воздействий, алгоритм работы, требующий обязательного наличия ЭВМ для реализации оптимизирующих функций.
За прототип приняты способ и система оптимального управления объектами двойного интегрирования [см. патент №2058575 (РФ), ПМК G05B 13/02, опубликован 1996.04.20, бюл. №11], заключающийся в выборке синтезирующих сигналов, позволяющих в реальном времени определять как оптимальное по быстродействию, так и оптимальное управления с минимумом затрат энергии при реализации программной и позиционной стратегии.
Недостатками прототипа являются низкое быстродействие, обусловленное необходимостью выполнения сложных операций анализа и синтеза оптимального управления в реальном масштабе времени, неоправданная сложность реализации рассчитанных энергосберегающих алгоритмов техническими средствами, а также невозможность оперативной перестройки принципов формирования синтезирующих сигналов при смене объекта управления.
Технической задачей способа и системы является повышение энергетической эффективности оборудования с минимумом затрат энергии, микросхемотехники, а также снижение затрат на программное обеспечение системы оптимального управления объектами двойного интегрирования, возможность автоматического принятия решений и реализация адаптивных управляющих воздействий по результатам анализа графического образа когнитивной матрицы состояний объекта с минимумом затрат энергии.
Поставленная техническая задача достигается следующим образом.
1. В способе оптимального управления объектами двойного интегрирования, заключающемся в организации синтезирующих сигналов L1 и L2, позволяющих в масштабе реального времени определять как оптимальные по быстродействию, так и оптимальное управление с минимумом затрат энергии по заданным образам эквивалентов, в отличие от прототипа, образы эквивалентов управления формируют в виде графического образа когнитивной матрицы, тождественно адресному пространству постоянного запоминающего устройства (ПЗУ), по синтезируемым сигналам которого выбирают сигналы управления состояниями динамического объекта, которые регламентированы соответствующим адресам точек когнитивных образов эквивалентов матрицы, где L1 - множество управляющих воздействий, L2 - меры оценки затрат на управление.
2. В системе оптимального управления, содержащей задатчик параметров, формирователь синтезирующих сигналов, генератор временной зависимости, соединенный с выходом продолжительности временного интервала задатчика параметров, а выходом - с каналом синхронизации формирователя синхронизирующих сигналов, анализатор и объект управления, выходы которого являются фазовыми координатами, а входы служат управляющими входами системы, включающей первые и вторые информационные входы анализатора когнитивного образа эквивалентов, в отличие от прототипа, дополнительно введены вычислитель адреса и знакогенератор, цифроаналоговый и аналого-цифровой преобразователи, последовательно включенные с объектом управления между управляющими входами системы и выходами фазовых координат, выходы аналого-цифрового преобразователя соединены с первой информационной входной шиной задатчика параметров, подключенного по второй информационной входной шине со входами цифроаналогового преобразователя и соответствующими выходами знакогенератора, информационные входы которого связаны с одноименными разрядами входов и выходов генератора временной зависимости, а адресные входы объединены поразрядно с выходами анализатора, первые и вторые информационные входы последнего объединены с соответствующими выходами вычислителя адреса, подключенного по шине фазовых координат с задатчиком параметров, соединенного по информационным каналам с соответствующими входами формирователя синтезирующих сигналов, выходные каналы которого подключены поразрядно с входными шинами синтезирующих сигналов вычислителя адреса.
3. В системе по п.2, в отличие от прототипа, знакогенератор выполнен на программируемой логической матрице, включающей по числу эквивалентов анализатора количество программируемых генераторов оптимального управления, систематизированных в адресном пространстве программируемой логической матрицы для подключения к информационным выходам знакогенератора соответствующего когнитивному образу эквивалента кода анализатора, поступающего на адресные входы программируемой логической матрицы, информационные входы которой служат для синхронизации нормируемого генератора импульсной последовательностью генератора временной зависимости.
4. В системе по п.2, в отличие от прототипа, анализатор выполнен на постоянном запоминающем устройстве, адресное пространство которого содержит когнитивный образ эквивалентов оптимального управления для сравнения с измеряемым адресом реального времени, формируемым вычислителем адреса для выбора адресуемого из знакогенератора нормируемого генератора оптимального управления.
5. В системе по п.2, в отличие от прототипа, генератором временной зависимости служит программируемый таймер импульсной последовательности, организованный на программируемом дешифраторе, выходы которого поразрядно соединены с его информационными входами и являются входами и выходами программируемого таймера, импульсная последовательность которого организована программным переключением дешифратора тактовыми импульсами, воздействующими на его младший разряд, для организации команды «стоп» по нулевому уровню импульса синхронизации при равенстве адресов Ai+1=Ai входной и выходной последовательности, инициации команды «переход» при изменении адреса на нормированный сдвиг, неравный нулю Ai+1=Ai+Δi, и генерации переключения на адрес перехода при появлении высокого уровня потенциала импульса синхронизации или команды «возврат» при изменении адреса на исходный Ak=Аh для задания цикла таймирования из алгебраической последовательности кодов переключения, составляющих программу цикла, период которого изменяют заданием априори исходного (начального) и конечного адресов программы, а также сдвига переадресации.
6. В системе по п.2, в отличие от прототипа, формирователь синхронизирующих сигналов организуют по аналогии с п.5 преобразованием кода в измеряемый адрес когнитивного образа эквивалентов {L1, L2} или в синхронизирующие сигналы для нормируемых преобразований в вычислителе адреса.
7. В системе по п.2, в отличие от прототипа, вычислитель адреса выполняют для сложных операторов на основе контроллера, а для алгебраических преобразований - на базе программируемого дешифратора по аналогии с п.6 для создания сканирующих импульсов развертки когнитивного образа эквивалентов, а также регистрации и сравнения их адресов с измеряемыми координатами оптимального управления.
Способ и система представлены на фиг.1-10.
Сущность предлагаемого способа оптимального управления объектами двойного интегрирования заключается в организации синтезирующих сигналов L1 и L2, позволяющих в масштабе реального времени определять как оптимальные по быстродействию, так и оптимальное управление с минимумом затрат энергии по заданным образам эквивалентов, сформированных в виде графического образа (фиг.1) когнитивной матрицы.
Для повышения энергетической эффективности оборудования с минимумом затрат энергии, микросхемотехники, образы эквивалентов управления формируют в виде графического образа (фиг.1) когнитивной матрицы, тождественно адресному пространству ПЗУ, по синтезируемым сигналам которого выбирают сигналы управления состояниями динамического объекта. Данные сигналы регламентированы соответствующим адресам точек когнитивных образов эквивалентов матрицы, где L1 - множество управляющих воздействий, L2 - меры оценки затрат на управление. Это позволяет исключить процедуру анализа оптимального управления в реальном масштабе времени, тем самым значительно упростить и ускорить работу энергетической системы и, следовательно, понизить требования к техническим и программным средствам, реализующим управление.
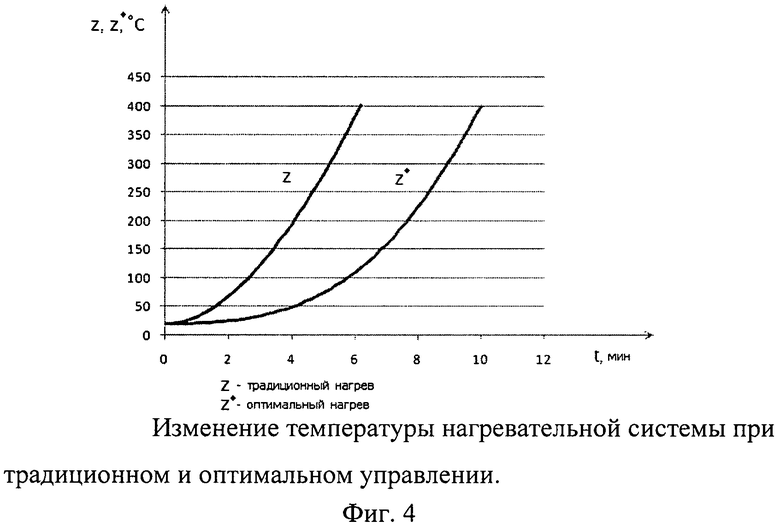
Поясним предлагаемый способ на примере оптимального управления динамическими процессами электрооборудования. Процесс динамики (фиг.4, кривая z) электрических нагревателей и электродвигателей может быть описан системой дифференциальных уравнений
где z1 и z2 представляют собой фазовые координаты, параметр а2 характеризует инерционность объекта управления, параметр b - коэффициент усиления управляющего воздействия u(t).
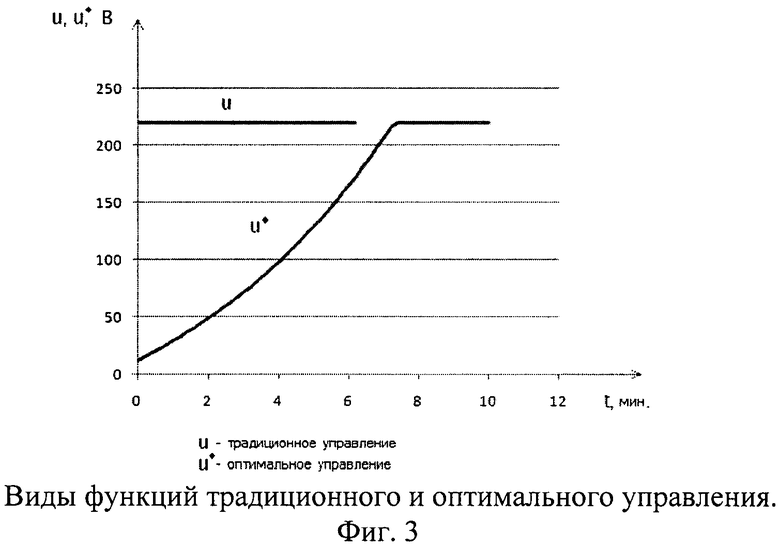
Для определения оптимальных управляющих воздействий u* (фиг.3) с заданным ограничением по времени

реализующих оптимальное энергосберегающее управление по переводу объекта из начального состояния

в конечное

при ограничении на управление

с минимумом затрат энергии

необходима сложная двухэтапная процедура, состоящая из анализа и синтеза оптимального управления в реальном масштабе времени.
Анализ оптимального управления охватывает широкий круг задач, связанных с исследованиями вопросов существования решения, устойчивости, определения возможных видов функций оптимального управления и множество других задач. Выполнение процедуры анализа оптимального управления требует сложных алгоритмических и математических расчетов и как следствие дорогостоящих высокопроизводительных микропроцессорных технических средств. Это является препятствием оптимального управления объектами.
Для выполнения процедур анализа и синтеза производится задание массива реквизитов, представляющего собой исходные данные для решения задачи оптимального энергосберегающего управления

Результаты анализа оптимального управления на множестве состояний функционирования служат основой для построения когнитивного графического образа, применяемого в дальнейшем для построения устройств энергосберегающего управления различными динамическими объектами.
Для модели процесса динамики, описываемой системой дифференциальных уравнений (1) на основе проведенного полного анализа оптимального управления, синтезирующие переменные будут иметь следующий вид:


где




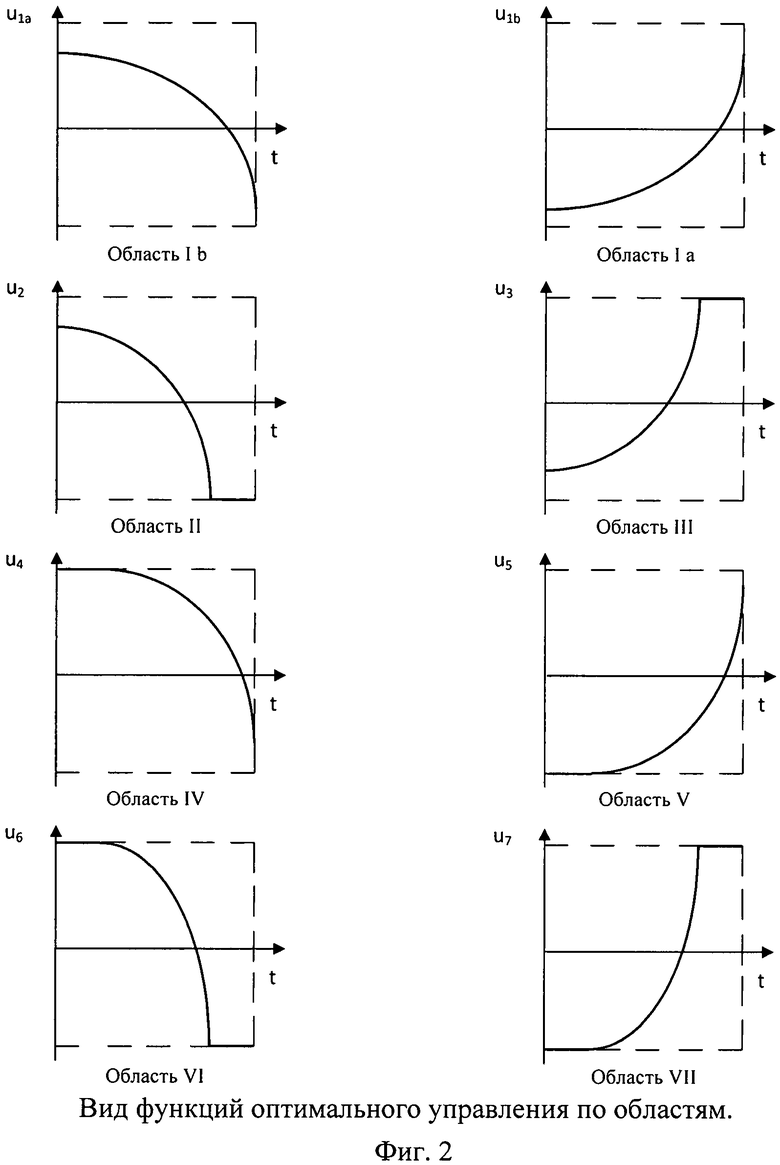
Из полученных на основе полного анализа областей (фиг.1) областями, для которых существует оптимальное управление, будут являться области Iа, Ib, II, III, IV, V, VI, VII. По когнитивному графическому образу (фиг.1) областей оптимального управления в пространстве синтезирующих переменных (8, 9) в зависимости от области определяется общий вид функции оптимального управления (фиг.2), после чего в результате операции синтеза формируется управляющее воздействие u* (3) (фиг.3) для заданного состояния функционирования объекта hj

где Н - множество состояний функционирования объекта управления.
Таким образом, синтез управляющих воздействий осуществляется по результатам полного анализа, проведенного априори и представленного в виде когнитивного образа множества состояний оптимального управления {Ф}={L1*L2}, сформированного в адресном пространстве кодовой матрицы L1*L2 ПЗУ устройства управления, по массиву исходных данных реквизитов задачи оптимального управления (7).
Если координаты точки L=(L1, L2) (формулы (8, 9)) не принадлежат ни одной из областей когнитивного графического образа областей оптимального управления в пространстве синтезирующих переменных (фиг.1), то управление объектом осуществляется традиционно.
Следовательно, управление ограничено, в каждый момент времени, концы траектории изменения фазовых координат закреплены и временной интервал фиксирован.
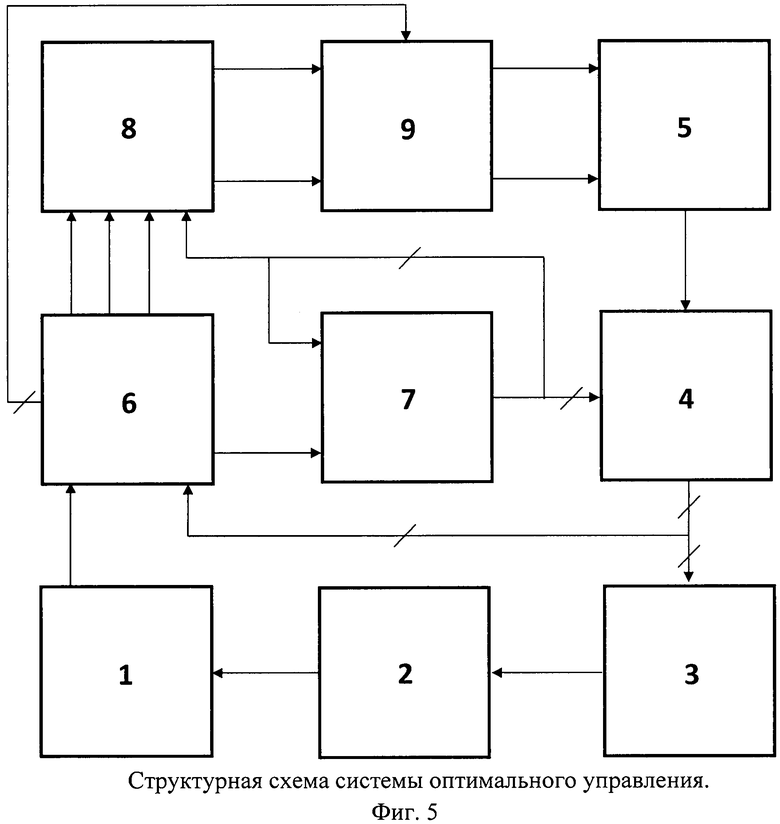
На фиг.5 представлена структурная схема системы, включающая в себя аналого-цифровой преобразователь (АЦП) 1, объект управления 2, цифроаналоговый преобразователь (ЦАП) 3, знакогенератор 4 оптимального управления, анализатор 5 когнитивного образа эквивалентов, задатчик 6 параметров, генератор 7 временной зависимости, формирователь 8 синтезирующих сигналов, вычислитель 9 адреса.
Вход объекта управления 2 соединен с выходом ЦАП 3, а выход с входом АЦП 1. Вход генератора 7 временной зависимости, соединен с выходом продолжительности временного интервала задатчика 6 параметров, а выход генератора 7 временной зависимости соединен с каналом синхронизации формирователя 8 синхронизирующих сигналов. Выходы АЦП 1 соединены с первой информационной входной шиной задатчика 6 параметров, подключенного по второй информационной входной шине со входами ЦАП 3 и соответствующими выходами знакогенератора 4, информационные входы которого связаны с одноименными разрядами входов и выходов генератора 7 временной зависимости, а адресные входы объединены поразрядно с выходами анализатора 5. Первые и вторые информационные входы анализатора 5 объединены с соответствующими выходами вычислителя 9 адреса, подключенного по шине фазовых координат с задатчиком 6 параметров, соединенного по информационным каналам с соответствующими входами формирователя 8 синтезирующих сигналов, выходные каналы которого подключены поразрядно с входными шинами синтезирующих сигналов вычислителя 9 адреса.
Заявляемый способ реализуется системой оптимального управления двойного интегрирования следующим образом.
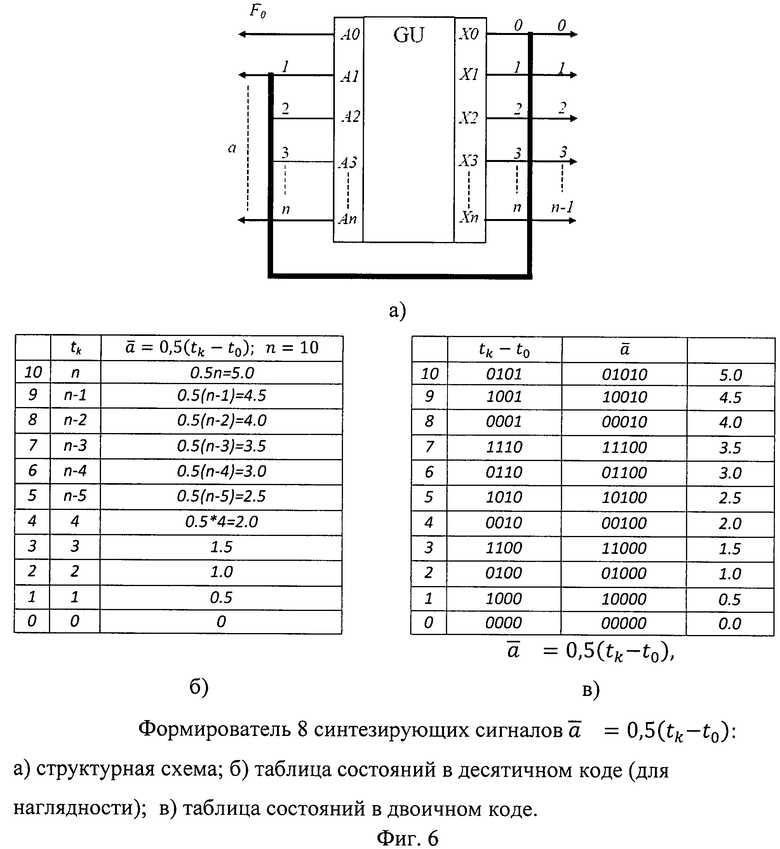
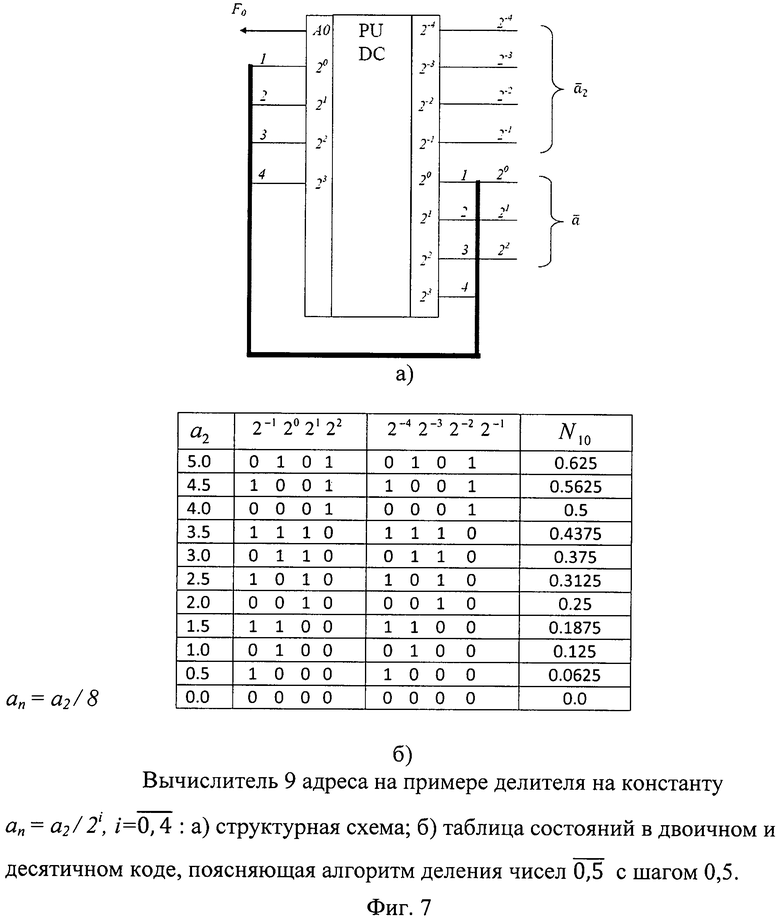
Для выполнения процедур анализа и синтеза задается массив реквизитов (7) с помощью задатчика 6 параметров, реализуемого на регистре или оперативном запоминающем устройстве. Задатчик 6 параметров определяет параметры (10-13) и передает их в формирователь 8 синтезирующих сигналов. Формирователь 8 синхронизирующих сигналов (фиг.5, фиг.6) организован по аналогии с программируемым таймером генератора 7 временной зависимости с преобразованием кода (а 2, b, uн, uв, t0, tk) в измеряемый адрес когнитивного образа эквивалентов {L1, L2} или в синхронизирующие сигналы для нормируемых преобразований в вычислителе 9 адреса. Вычислитель 9 адреса (фиг.5) для сложных операторов выполняется на основе контроллера, а для простых алгебраических преобразований - на базе программируемого дешифратора (фиг.7) по аналогии с формирователем 8 (фиг.5) синхронизирующих сигналов (фиг.6). Вычислитель 9 адреса генерирует сканирующие импульсы развертки когнитивного образа эквивалентов для вывода его при необходимости на экран монитора, а также организует регистрацию и сравнение адресов с измеряемыми координатами оптимального управления для выбора заданного генератора из знакогенератора 4.
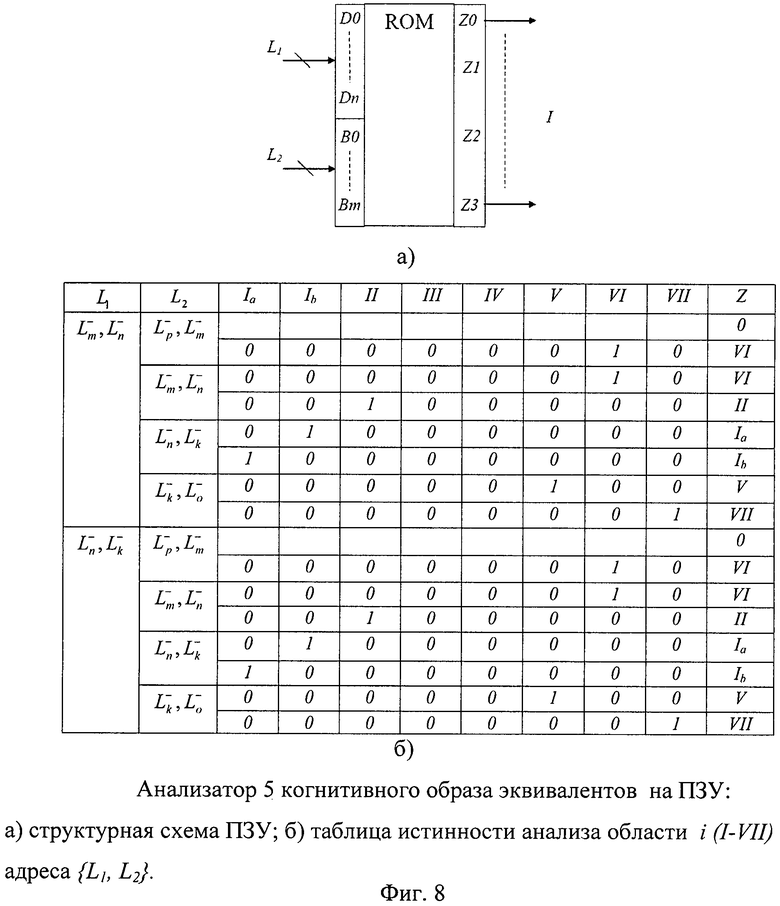
С вычислителя 9 адреса сканирующие импульсы развертки когнитивного образа эквивалентов {L1, L2} подаются на анализатор 5. Анализатор 5 (фиг.5, фиг.8) выполнен на постоянном запоминающем устройстве (фиг.8, а), адресное пространство (фиг.8, б) которого содержит когнитивный образ (фиг.1) эквивалентов оптимального управления. Анализатор 5 осуществляет сравнение измеряемого адреса реального времени, формируемого вычислителем 9 адреса для последующего выбора, адресуемого из знакогенератора 4 нормируемого генератора оптимального управления. Анализ работы ПЗУ приведен на примере фрагмента сравнения анализатора 5 в III квадранте (-L1, -L2) когнитивного образа (фиг.1) в виде таблицы состояний (фиг.8, б).
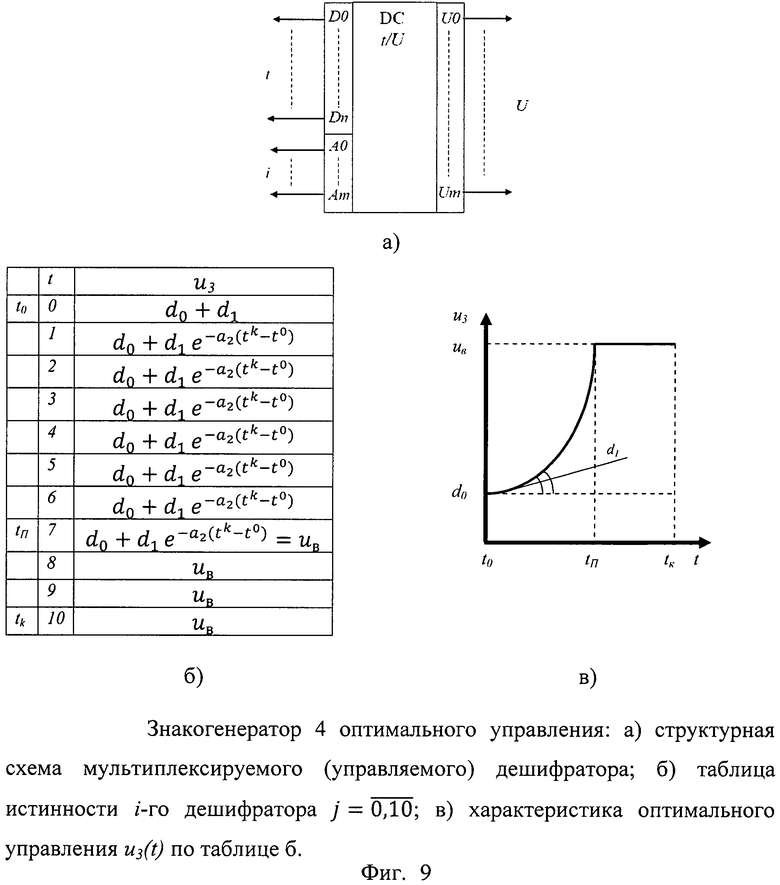
Знакогенератор 4 (фиг.9) выполнен на программируемой логической матрице, включающей по числу эквивалентов (фиг.1) анализатора 5 количество i, программируемых генераторов оптимального управления, систематизированных в адресном пространстве. На адресные входы 
 знакогенератора 4 с информационных выходов анализатора 5 поступает код i, соответствующий когнитивному образу I-VII эквивалента (фиг.1). Выходной сигнал из таблицы состояний (фиг.9, б) знакогенератора 4 (фиг.9, а) преобразуется ЦАП 3 в управляющее воздействие ui (фиг.2, фиг.9, в) на объект управления 2 (фиг.5). Информационные входы
знакогенератора 4 с информационных выходов анализатора 5 поступает код i, соответствующий когнитивному образу I-VII эквивалента (фиг.1). Выходной сигнал из таблицы состояний (фиг.9, б) знакогенератора 4 (фиг.9, а) преобразуется ЦАП 3 в управляющее воздействие ui (фиг.2, фиг.9, в) на объект управления 2 (фиг.5). Информационные входы  программируемой логической матрицы знакогенератора 4 служат для синхронизации i-го нормируемого генератора импульсной последовательностью t=(t0, tk) генератора 7 временной зависимости.
программируемой логической матрицы знакогенератора 4 служат для синхронизации i-го нормируемого генератора импульсной последовательностью t=(t0, tk) генератора 7 временной зависимости.
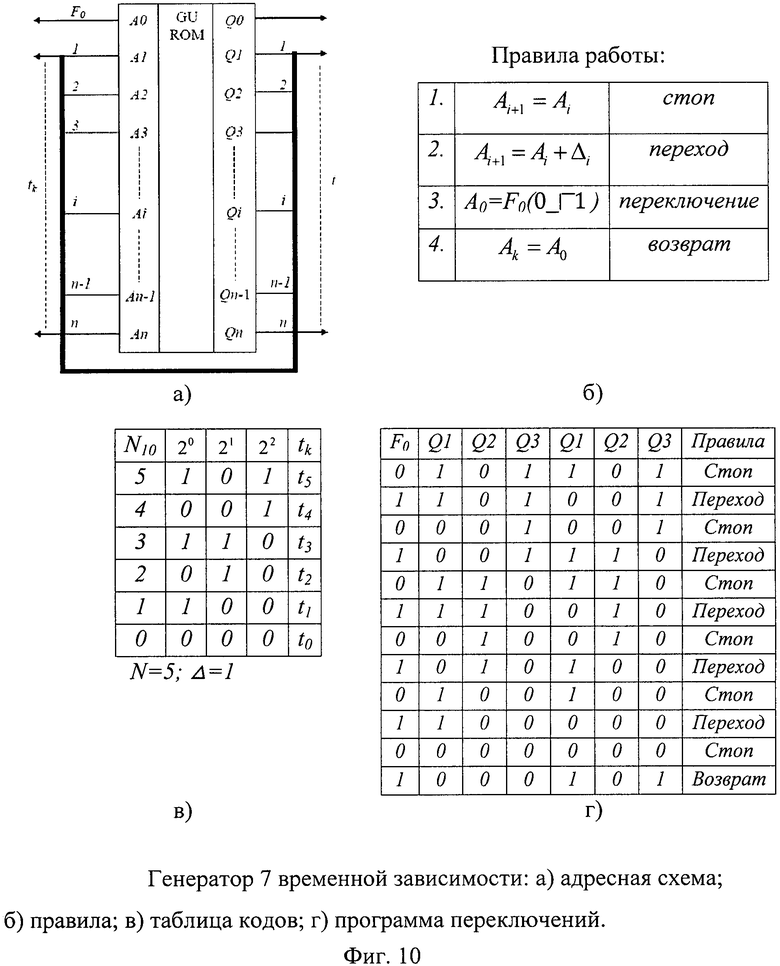
Генератором 7 временной зависимости (фиг.5) функционально служит программируемый таймер (фиг.10) импульсной последовательности, организованный конструктивно на программируемом дешифраторе (фиг.10, а), выходы которого поразрядно соединены с его информационными входами и являются входами и выходами программируемого таймера 7. Импульсная последовательность программируемого таймера 7 организована программным переключением дешифратора тактовыми импульсами F0, воздействующими на его младший разряд A0. Правила работы (фиг.10, б) программируемого таймера (фиг.10, а) организованы следующим образом. Команда «стоп» выполняется по нулевому уровню импульса синхронизации частоты F0 при равенстве адресов Аi+1=Аi входной Аi+1 и выходной Ai последовательности. Инициация команды «переход» Ai+1 осуществляется при изменении адреса Ai на нормированный сдвиг Δi, неравный нулю Ai+1=Ai+Δi. При появлении высокого уровня  потенциала импульса генерируется фронт импульса частоты F0, то есть переключение на адрес перехода Аi+1 синхронизации или команды «возврат» при изменении адреса A0 на исходный Ak=A0. Таким образом, цикл таймирования является алгебраической последовательностью кодов переключения, составляющих программу цикла. Период цикла изменяют заданием априори начального Аk, например k=1,5 (фиг.10, в), и конечного A0 адресов программы, а также сдвига Δi переадресации. Таблицы состояния (фиг.10, в, г) поясняют физику работы таймера (фиг.10, а) генератора 7 на примере шести операций в виде таблицы кодов (фиг.10, в) tk(N), для задания времени tk от кода N и программы переключения (фиг.10, г) в двоичном коде.
потенциала импульса генерируется фронт импульса частоты F0, то есть переключение на адрес перехода Аi+1 синхронизации или команды «возврат» при изменении адреса A0 на исходный Ak=A0. Таким образом, цикл таймирования является алгебраической последовательностью кодов переключения, составляющих программу цикла. Период цикла изменяют заданием априори начального Аk, например k=1,5 (фиг.10, в), и конечного A0 адресов программы, а также сдвига Δi переадресации. Таблицы состояния (фиг.10, в, г) поясняют физику работы таймера (фиг.10, а) генератора 7 на примере шести операций в виде таблицы кодов (фиг.10, в) tk(N), для задания времени tk от кода N и программы переключения (фиг.10, г) в двоичном коде.
Архитектура блоков 4-9 (фиг.5) отличается только программным обеспечением, а аппаратные средства их тождественны и аналогичны способы преобразования сигналов. Это позволяет их организовывать на едином ПЗУ с различными программами в едином адресном пространстве.
С выхода объекта управления 2 информация о его состоянии посредством АЦП 1 передается на задатчик 6 параметров.
Все это минимизирует микросхемотехнику, сокращает интеллектуальные, материальные и технологические затраты.
Докажем эффективность предлагаемых способа и устройства оперативного динамического анализа состояний многопараметрического объекта относительно прототипа. Теоретические исследования и практические результаты показывают, что при оптимальном управлении уменьшение затрат энергии может достигать от 5% до 40% по сравнению с традиционно используемыми управляющими воздействиями [см. Аджиев М.Э. Энергосберегающие технологии. - М.: Энергоатомиздат, 1990. 64 с.; Аракелов В.Е., Кремер А.И. Методические вопросы экономии энергоресурсов. - М.: Энергоатомиздат, 1990. 188 с.].
В качестве примера рассмотрим перевод теплового объекта - нагревательного элемента из начального состояния  в конечное состояние
в конечное состояние  с минимумом затрат энергии. Массив реквизитов для анализа энергосберегающего управления приведен в таблице 1.
с минимумом затрат энергии. Массив реквизитов для анализа энергосберегающего управления приведен в таблице 1.




Здесь IЭ - функционал (лимит) затрат энергии при традиционном управлении (фиг.3, кривая и). Следовательно, задача заключается в определении такого управления, которое обеспечит перевод объекта из начального состояния в конечное с минимумом затрат энергии (6).
В результате проведения полного анализа оптимального управления получаем цветокодовую матрицу в виде образов эквивалентов множества состояний оптимального управления (фиг.1).
Далее когнитивный графический образ формируют в адресном пространстве кодовой матрицы постоянного запоминающего устройства в виде образов эквивалентов множества состояний оптимального управления.
На следующем этапе осуществляется операция синтеза, в результате чего получаем координаты точки S (фиг.1, таблица №2) и в соответствии с координатами полученной точки осуществляется выбор вида функции управления и осуществляется ее реализация (фиг.2, фиг.3, таблица №3).
На фиг.4 и в таблице №3 приведены зависимости, отображающие изменение температуры нагревательной системы при традиционном и оптимальном управлении.
Вид функции оптимального управления для состояния объекта в полученной точке S будет определяться следующей системой уравнений

где параметры d0=-93,07, d1=105,10, время переключения функций управления tп=7,27 мин.
Таким образом, используя свойство инерционности объекта и несколько большее время нагрева при энергосберегающем управлении, получаем функционал затрат энергии I=226651, что при сравнении с функционалом затрат энергии стандартного управления соответствует экономии электроэнергии, равной 36,6%.

В случае гибридных объектов, включающих в себя несколько энергоемких потребителей, экономический эффект может быть существенно выше, достигая 40-50%.
Предлагаемый способ и система оптимального управления двойного интегрирования позволяют значительно упростить требования к системам оптимального энергосберегающего управления динамическими объектами, в частности электроприводами на основе двигателей постоянного и переменного тока, химико-технологическими процессами, за счет того, что сложная процедура анализа оптимального управления производится априори, а образы эквивалентов управления формируют в виде графического образа когнитивной матрицы, тождественно адресному пространству ПЗУ, по синтезируемым сигналам которого выбирают сигналы управления состояниями динамического объекта. В результате чего не требуется его определение в процессе управления. Все это минимизирует микросхемотехнику, сокращает интеллектуальные, материальные и технологические затраты.
Реализация предлагаемого способа осуществлена с использованием системы оптимального управления двойного интегрирования, с применением экспертной системы энергосберегающего управления и автоматизированного рабочего места разработчика систем энергосберегающего управления.
Таким образом, предлагаемый способ, благодаря формированию образов эквивалентов управления виде графического образа когнитивной матрицы, тождественно адресному пространству ПЗУ, по синтезируемым сигналам которого выбирают сигналы управления состояниями динамического объекта, которые регламентированы соответствующим адресам точек когнитивных образов эквивалентов матрицы, в отличие от известных решений, экономит электроэнергию от 5 до 40%, что повышает энергетическую эффективность оборудования с минимумом затрат энергии. Это позволяет снизить затраты на аппаратное обеспечение системы управления вследствие пониженных требований к быстродействию системы, конфигурации микросхемотехники, а также свести к минимуму влияние субъективизма при принятии решений, сделать возможным процедуру автоматического принятия решений за счет реализации адаптивных управляющих воздействий по результатам анализа когнитивного образа состояний исследуемого объекта с минимумом затрат энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ЦВЕТОВОГО ПРЕДСТАВЛЕНИЯ АНАЛИЗА ДИНАМИКИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2014 |
|
RU2580813C2 |
| СПОСОБ И УСТРОЙСТВО ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2009 |
|
RU2422873C2 |
| СПОСОБ ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА НЕЧЕТКОГО СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2013 |
|
RU2530297C1 |
| СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО ДАННЫМ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403619C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2014 |
|
RU2571570C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ДИАГНОСТИЧЕСКОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403618C1 |
| ТРЕНАЖЕР ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ МАТРИЦ | 1990 |
|
RU2102792C1 |
| ТРЕНАЖЕР МНЕМОСХЕМ | 1994 |
|
RU2116674C1 |
| ТРЕНАЖЕР МНЕМОСХЕМ | 1990 |
|
RU2101772C1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ И ОТОБРАЖЕНИЯ ИНФОРМАЦИИ | 1992 |
|
RU2101781C1 |
Изобретение относится к области оптимального управления динамическими объектами и может быть использовано в системах энергосберегающего управления динамическими объектами, электроприводами на основе двигателей постоянного и переменного тока, химико-технологическими процессами. Техническим результатом является повышение энергетической эффективности оборудования с минимумом затрат энергии и микросхемотехники. В способе оптимального управления объектами двойного интегрирования образы эквивалентов управления формируют в виде графического образа когнитивной матрицы, тождественно адресному пространству постоянного запоминающего устройства, по синтезируемым сигналам которого выбирают сигналы управления состояниями динамического объекта, которые регламентированы соответствующим адресам точек когнитивных образов эквивалентов матрицы, где L1 - множество управляющих воздействий, L2 - меры оценки затрат на управление. 2 н. и 5 з.п. ф-лы, 10 ил., 3 табл.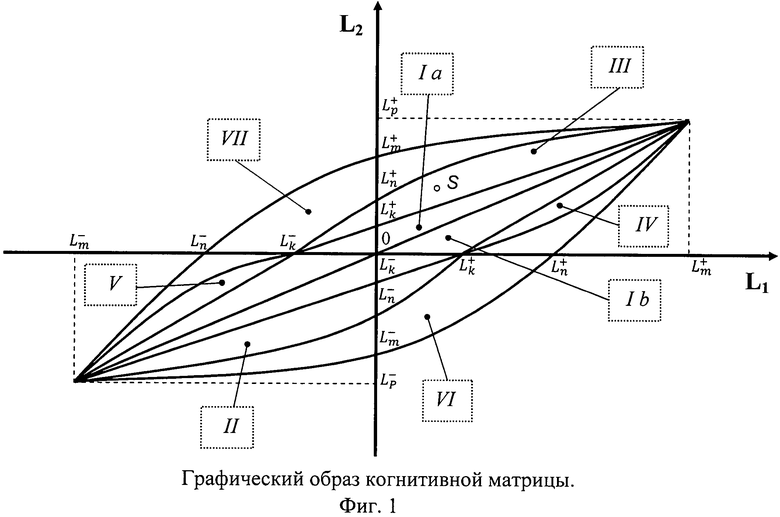
1. Способ оптимального управления объектами двойного интегрирования, заключающийся в организации синтезирующих сигналов L1 и L2, позволяющих в масштабе реального времени определять как оптимальные по быстродействию, так и оптимальное управление с минимумом затрат энергии по заданным образам эквивалентов, отличающийся тем, что образы эквивалентов управления формируют в виде графического образа когнитивной матрицы тождественно адресному пространству ПЗУ, по синтезируемым сигналам которого выбирают сигналы управления состояниями динамического объекта, которые регламентированы соответствующим адресам точек когнитивных образов эквивалентов матрицы, где L1 - множество управляющих воздействий, L2 - меры оценки затрат на управление.
2. Система оптимального управления объектами двойного интегрирования, содержащая задатчик параметров, формирователь синтезирующих сигналов, генератор временной зависимости, соединенный с выходом продолжительности временного интервала задатчика параметров, а выходом - с каналом синхронизации формирователя синхронизирующих сигналов, анализатор и объект управления, выходы которого являются фазовыми координатами, а входы служат управляющими входами системы, включающей первые и вторые информационные входы анализатора когнитивного образа эквивалентов, отличающаяся тем, что дополнительно содержит вычислитель адреса и знакогенератор, цифроаналоговый и аналого-цифровой преобразователи, последовательно включенные с объектом управления между управляющими входами системы и выходами фазовых координат, выходы аналого-цифрового преобразователя соединены с первой информационной входной шиной задатчика параметров, подключенного по второй информационной входной шине со входами цифроаналогового преобразователя и соответствующими выходами знакогенератора, информационные входы которого связаны с одноименными разрядами входов и выходов генератора временной зависимости, а адресные входы объединены поразрядно с выходами анализатора, первые и вторые информационные входы последнего объединены с соответствующими выходами вычислителя адреса, подключенного по шине фазовых координат с задатчиком параметров, соединенного по информационным каналам с соответствующими входами формирователя синтезирующих сигналов, выходные каналы которого подключены поразрядно с входными шинами синтезирующих сигналов вычислителя адреса.
3. Система по п.2, отличающаяся тем, что знакогенератор выполнен на программируемой логической матрице, включающей по числу эквивалентов анализатора количество программируемых генераторов оптимального управления, систематизированных в адресном пространстве программируемой логической матрицы для подключения к информационным выходам знакогенератора соответствующего когнитивному образу эквивалента кода анализатора, поступающего на адресные входы программируемой логической матрицы, информационные входы которой служат для синхронизации нормируемого генератора импульсной последовательностью генератора временной зависимости.
4. Система по п.2, отличающаяся тем, что анализатор выполнен на постоянном запоминающем устройстве, адресное пространство которого содержит когнитивный образ эквивалентов оптимального управления для сравнения с измеряемым адресом реального времени, формируемым вычислителем адреса для выбора адресуемого из знакогенератора нормируемого генератора оптимального управления.
5. Система по п.2, отличающаяся тем, что генератором временной зависимости служит программируемый таймер импульсной последовательности, организованный на программируемом дешифраторе, выходы которого поразрядно соединены с его информационными входами и являются входами и выходами программируемого таймера, импульсная последовательность которого организована программным переключением дешифратора тактовыми импульсами, воздействующими на его младший разряд, для организации команды «стоп» по нулевому уровню импульса синхронизации при равенстве адресов Ai+1=Ai входной и выходной последовательности, инициации команды «переход» при изменении адреса на нормированный сдвиг, неравный нулю Аi+1=Аi+Δi, и генерации переключения на адрес перехода при появлении высокого уровня потенциала импульса синхронизации или команды «возврат» при изменении адреса на исходный Ak=Ah для задания цикла таймирования из алгебраической последовательности кодов переключения, составляющих программу цикла, период которого изменяют заданием априори исходного (начального) и конечного адресов программы, а также сдвига переадресации.
6. Система по п.2, отличающаяся тем, что формирователь синхронизирующих сигналов организуют по аналогии по п.5 с преобразованием кода в измеряемый адрес когнитивного образа эквивалентов {L1, L2} или в синхронизирующие сигналы для нормируемых преобразований в вычислителе адреса.
7. Система по п.2, отличающаяся тем, что вычислитель адреса выполняют для сложных операторов на основе контроллера, а для алгебраических преобразований - на базе программируемого дешифратора по аналогии по п.6 для создания сканирующих импульсов развертки когнитивного образа эквивалентов, а также регистрации и сравнения их адресов с измеряемыми координатами оптимального управления.
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1288729A1 |
| RU 2058575 C1, 20.04.1996 | |||
| RU 97118820 A, 20.08.1999 | |||
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ОБ ОБЪЕКТАХ КОНТРОЛИРУЕМОГО ДИСПЕТЧЕРСКОГО КРУГА | 1996 |
|
RU2107940C1 |
| US 4563734 A, 07.01.1986. | |||

