Изобретение относится к вычислительной технике и может быть использовано в автоматизированных системах диагностики, идентификации, контроля технического и функционального состояния сложных динамических объектов без непосредственного присутствия персонала на объекте, а также для оперативного синтеза оптимальных энергосберегающих управляющих воздействий.
Существует способ и система цветового представления и анализа динамики состояния многопараметрического объекта или процесса [см. кн. Теория автоматического управления/ Под ред. Ю.М. Соломенцева. - М.: Высшая школа, 2000. - С.203-205]. Способ заключается в оценке оператором качественных и количественных характеристик измеряемых величин и получении от системы рекомендаций по необходимым к выполнению действиям по заранее созданным алгоритмам из пополняемой библиотеки программ.
Недостатками этого способа и системы являются низкая оперативность выполнения процедур, необходимых для оценки динамики работы системы и ее коррекции, дорогостоящее программное и аппаратное обеспечение, сложность комплексной оценки поступающей информации, представляемой в разнородной форме, необходимость непосредственного присутствия обслуживающего персонала на объекте, субъективизм принятия решений, отсутствие функции синтеза в реальном масштабе времени энергосберегающих управляющих воздействий.
Существует способ и система цветового представления и анализа динамики состояния многопараметрического объекта или процесса [см. кн. Измерение электрических и неэлектрических величин/ Под ред. Н.Н. Евтихеева. - М.: Энергоатомиздат, 1990. - С.247-248]. Способ заключается в двухсторонней передаче и обработке информации системой, в состав которой входят пункт управления и множество объектов. Передаваемая по помехозащищенным каналам связи информация представлена в виде непрерывных и дискретных сигналов, формируемых сложными коммутационными устройствами.
Недостатками этого способа и системы являются чрезмерная сложность системы, множество каналов связи, требующих высокую пропускную способность в связи с необходимостью передачи как дискретных, так и непрерывных сигналов, отсутствие функции синтеза в реальном масштабе времени энергосберегающих управляющих воздействий, алгоритмы работы, требующие наличия дорогостоящих высокопроизводительных ЭВМ для реализации оптимизирующих функций и анализа динамики состояния объекта.
За прототип приняты способ цветового представления и анализа динамики состояния многопараметрического объекта или процесса [см. патент №2150742 (РФ), МПК G06F 19/00, опубликован 2000.06.10], заключающийся в преобразовании текущих значений разнородных динамических параметров в соответствующие информационные цветокодовые сигналы видимого спектра последовательно во времени с обобщением по всему множеству динамических параметров, и система анализа динамики состояния многопараметрического объекта или процесса [см. патент №2058575 (РФ), ПМК G05B 13/02, опубликован 1996.04.20, Бюл. №11], выполняющая выборку синтезирующих сигналов и позволяющая в реальном времени определять оптимальное по быстродействию и уровню затрат энергии управление.
Недостатками прототипа являются низкое быстродействие, обусловленное выполнением сложных операций анализа и синтеза оптимального управления в реальном масштабе времени, сложность реализации рассчитанных энергосберегающих алгоритмов техническими средствами, что ограничивает область применения системы, отсутствие контроля состояния силовых исполнительных устройств, что повышает риск аварийности, а также отсутствие оперативной коррекции принципов формирования синтезирующих сигналов при изменении характеристик объекта управления.
Технической задачей способа и системы является повышение экономической эффективности анализа динамического состояния многопараметрических объектов и процессов, энергетической эффективности оборудования с минимумом затрат энергии, микросхемотехники, а именно снижение затрат на аппаратное и программное обеспечение системы, минимизация влияния субъективного фактора при оперативном обнаружении изменения состояния многопараметрического объекта или процесса, возможность автоматического принятия решений и реализация адаптивных управляющих воздействий по результатам анализа когнитивной матрицы-диаграммы состояний исследуемого объекта с минимумом затрат энергии.
Поставленная техническая задача достигается тем, что:
1. В способе цветового представления и анализа динамики состояния многопараметрического объекта или процесса, в котором текущие значения разнородных динамических параметров преобразуют в соответствующие информационные цветокодовые сигналы видимого спектра посредством матрицы-диаграммы состояния многопараметрического объекта, последовательно во времени с обобщением по всему множеству динамических параметров в заданном временном интервале, в отличие от прототипа, матрицу-диаграмму формируют в виде групп когнитивных образов эквивалентов состояний объекта или процесса, систематизированных в адресном пространстве постоянного запоминающего устройства (ПЗУ) тождественно образам эквивалентов множества состояний оптимального управления, которые определяют априори из полного анализа процессов динамики оптимального управления объектом или процессом, описываемых многозонными моделями, с последующим применением групп когнитивных образов для синтеза в масштабе реального времени оптимальных энергосберегающих управляющих воздействий при любых изменениях динамики состояния многопараметрического объекта или процесса.
2. В системе цветового представления и анализа динамики состояния многопараметрического объекта или процесса, содержащей задатчик параметров, формирователь синтезирующих сигналов, генератор временной зависимости, анализатор, исполнительное устройство и объект управления, выходы которого являются фазовыми координатами, а входы служат управляющими входами системы, в отличие от прототипа, дополнительно содержится ПЗУ последовательности когнитивных образов, ПЗУ матрицы-диаграммы когнитивных образов, дешифратор, мультиплексор, устройство контроля параметров силовых элементов, выходы фазовых координат объекта управления объединены в общую шину с анализатором и задатчиком параметров, выход которого управляет группой старших разрядов ПЗУ последовательности когнитивных образов, выход первой группы данных которого подключен к генератору временной зависимости, который синхронизирует задатчик параметров и управляет младшими адресными группами ПЗУ матрицы-диаграммы когнитивных образов и ПЗУ последовательности когнитивных образов, выход второй группы данных которого объединен со старшей адресной группой ПЗУ матрицы-диаграммы когнитивных образов, первая группа данных которого поступает на дешифратор, вторая - на адресные входы мультиплексора, сигнал с дешифратора подается на формирователь синтезирующих сигналов, выходы которого объединены с информационными входами мультиплексора, выход которого подключен к объекту управления посредством исполнительного устройства, контрольный выход которого соединен с устройством контроля параметров силовых элементов, выходы которого объединены со входами анализатора и генератора временной зависимости, тактовые выходы которого соединены с входами синхронизации формирователя синтезирующих сигналов.
Способ и система представлены на фиг.1-6.
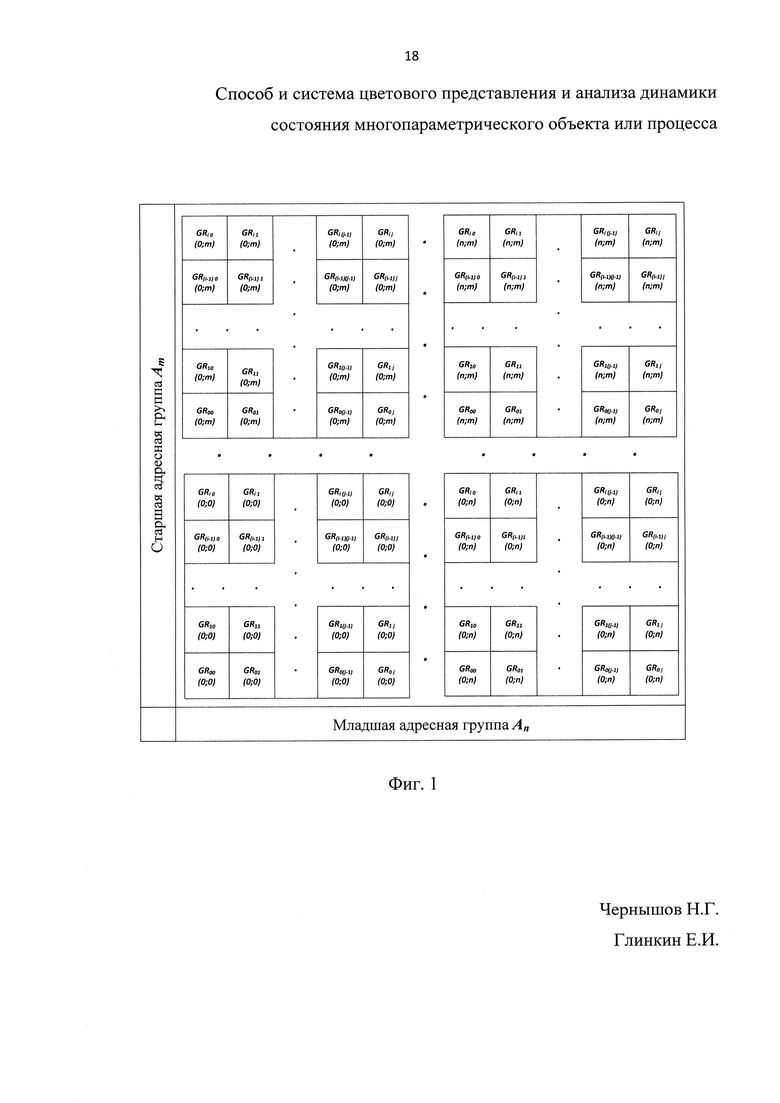
Сущность предлагаемого способа цветового представления и анализа динамики состояния многопараметрического объекта или процесса заключается в преобразовании состояния многопараметрического объекта в соответствующие информационные цветокодовые сигналы посредством цветокодовой матрицы-диаграммы состояния (фиг.1), формируемой из групп когнитивных образов эквивалентов (фиг.2) состояний объекта или процесса. С целью повышения энергетической эффективности оборудования с минимумом затрат энергии, микросхемотехники, группы когнитивных образов в виде матрицы-диаграммы состояния систематизируют в адресном пространстве ПЗУ тождественно образам эквивалентов множества состояний функционирования.
На первом этапе идентифицируются параметры многопараметрического объекта или процесса и выполняется процедура полного анализа процессов динамики оптимального управления на множестве состояний функционирования. По результатам анализа оптимального управления формируется множество когнитивных образов эквивалентов (фиг.2) GRij оптимального управления, которые объединены в группы, соответствующие многозонным моделям динамики многопараметрического объекта или процесса. Из данных групп в адресном пространстве ПЗУ систематизируют цветокодовую матрицу-диаграмму состояния многопараметрического объекта или процесса (фиг.1).
Анализ оптимального управления охватывает широкий круг задач, связанных с исследованиями вопросов существования решения, устойчивости, определения возможных видов функций оптимального управления и множество других задач. Выполнение процедуры анализа оптимального управления требует сложных алгоритмических и математических расчетов, дорогостоящих высокопроизводительных микропроцессорных технических средств. Это является серьезным препятствием в широкой реализации оптимального энергосберегающего управления объектами и процессами. Выполненная априори процедура полного анализа оптимального управления и полученная на ее основе цветокодовая матрица-диаграмма (фиг.1) позволяют решить задачу энергетической эффективности оборудования с минимумом затрат энергии и микросхемотехники.
На втором этапе осуществляется синтез в масштабе реального времени энергосберегающих управляющих воздействий с использованием полученных когнитивных образов эквивалентов (фиг.2), для текущего состояния функционирования, путем выборки соответствующей группы когнитивных образов из цветокодовой матрицы-диаграммы (фиг.1) при любых изменениях динамики многопараметрического объекта или процесса.
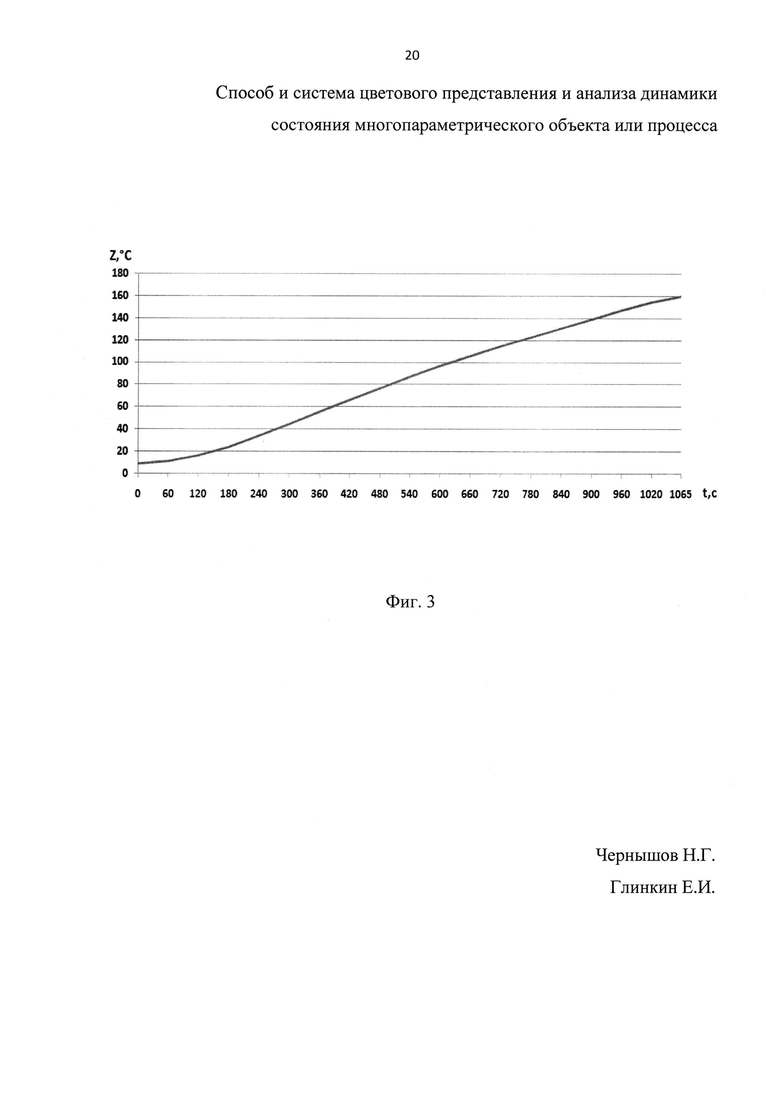
Поясним предлагаемый способ на примере управления электрическим нагревательным элементом, входящим в группу аналогичных устройств многопараметрического объекта, представляющих собой активную нагрузку. Процесс динамики электрического нагревателя (фиг.3) может быть описан системой дифференциальных уравнений
 ,
,

где z1, и z2 представляют собой фазовые координаты, параметр а характеризует инерционность объекта управления, параметр b - коэффициент усиления управляющего воздействия u(t), t - время.
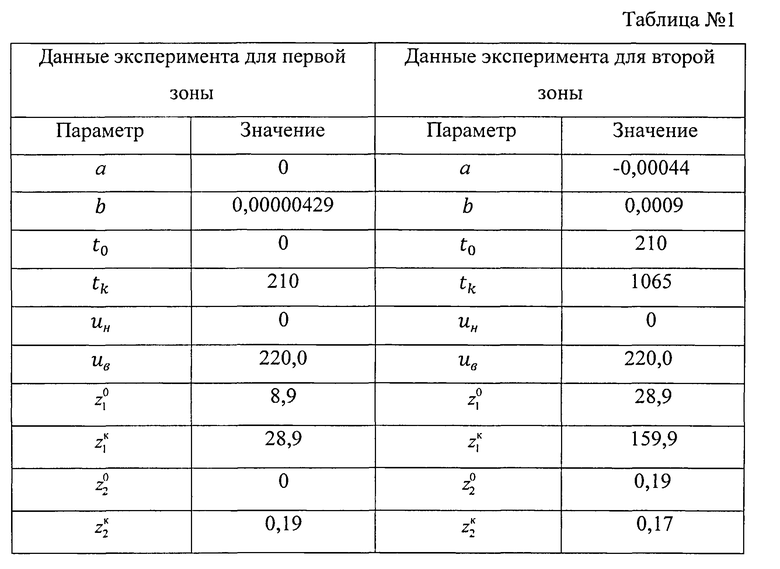
Для конкретного примера используются две идентичные модели динамики процесса, описывающие различные участки кривой нагрева (фиг.3), в совокупности образующие многозонную модель, с отличными фазовыми координатами и параметрами. Количество зон и многообразие моделей определяется особенностями конкретного объекта или процесса.
Для определения оптимальных управляющих энергосберегающих воздействий u*, реализующих оптимальное управление по переводу объекта из начального состояния z0 в конечное zk, выполняется двухэтапная процедура, состоящая из анализа оптимального управления и синтеза управляющих воздействий в реальном масштабе времени с заданными ограничениями

где uн - нижний порог управляющего воздействия; uв - верхний порог управляющего воздействия; t0 - начальное время; tk - конечное время.
Для выполнения процедуры анализа оптимального управления вводятся исходные данные в виде массива реквизитов

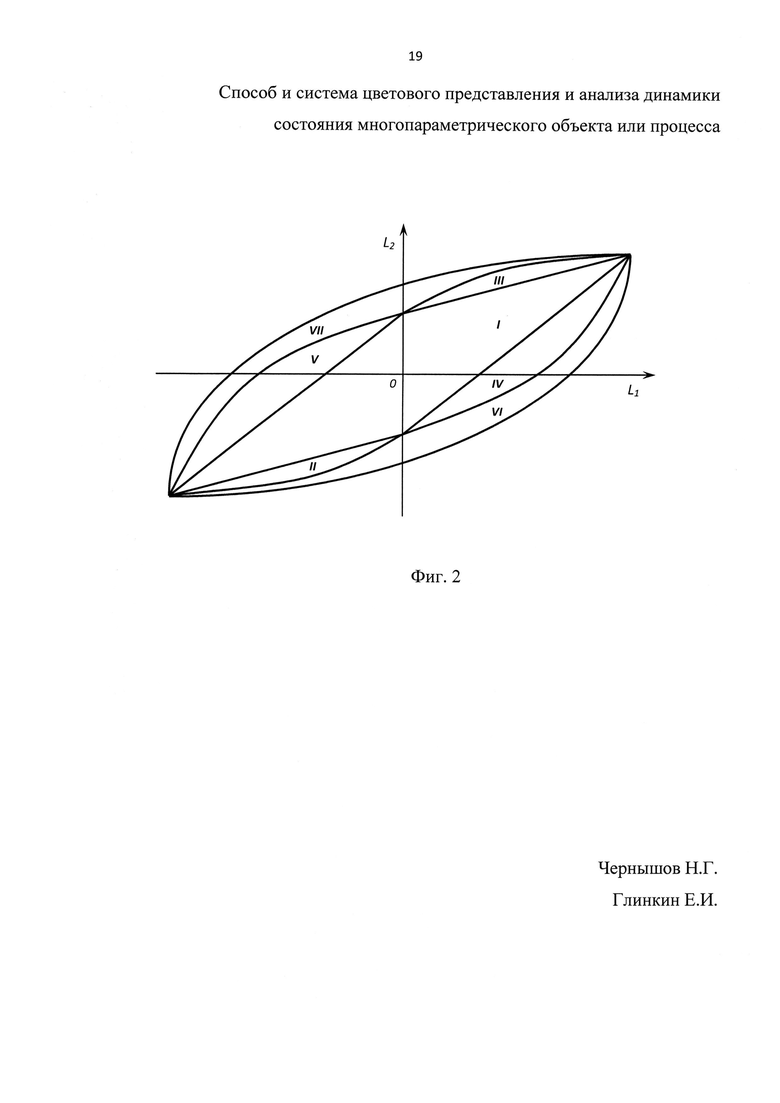
Результатом полного анализа оптимального управления для моделей (1) является когнитивный образ эквивалента состояния объекта (фиг.2), где L1 и L2 - синтезирующие переменные, L1 - множество управляющих воздействий, L2 - меры оценки затрат на управление. Области I, II, III, IV, V, VI, VII, когнитивного образа являются зонами, где возможно существование решения задачи оптимального управления, а каждой зоне соответствует определенная функция управления.
Синтез управляющих воздействий осуществляется по результатам полного анализа оптимального управления, проведенного априори, конечные результаты которого представлены в виде матрицы-диаграммы состояния многопараметрического объекта или процесса. Если рассчитанные в процессе синтеза координаты точки L=(L1, L2), определяющей зону решения задачи оптимального управления, не принадлежат ни одной из областей I, II, III, IV, V, VI,VII когнитивного образа эквивалента состояния объекта (фиг.2), то управление осуществляется традиционно. Вид когнитивного образа эквивалентного состояния объекта может быть отличным от представленного на фиг.2 в случае иной модели объекта или процесса.
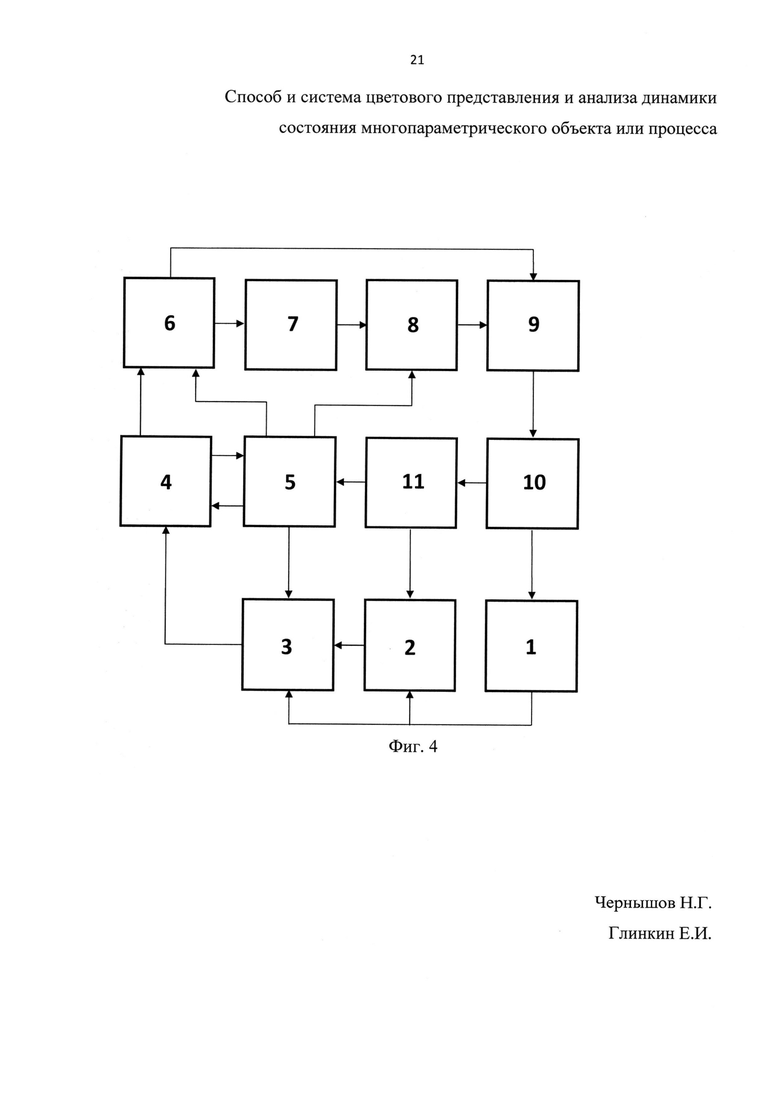
На фиг.4 представлена структурная схема системы, включающая в себя объект управления 1, анализатор 2, задатчик параметров 3, ПЗУ последовательности когнитивных образов 4, генератор временной зависимости 5, ПЗУ матрицы-диаграммы когнитивных образов 6, дешифратор 7, формирователь синтезирующих сигналов 8, мультиплексор 9, исполнительное устройство 10, устройство контроля параметров силовых элементов 11.
Вход объекта управления 1 соединен с выходом исполнительного устройства 10, а выход фазовых координат объединен с входом анализатора 2 и первым входом задатчика параметров 3, выход которого соединен с группой старших разрядов ПЗУ последовательности когнитивных образов 4, выход первой группы данных которого подключен к входу генератора временной зависимости 5, синхронизирующий выход которого соединен со вторым входом задатчика параметров 3, а первый управляющий выход генератора временной зависимости 5 соединен с младшими адресными группами ПЗУ матрицы-диаграммы когнитивных образов 6. Второй управляющий выход генератора временной зависимости 5 соединен с младшими адресными группами ПЗУ последовательности когнитивных образов 4, выход второй группы данных которого объединен со старшей адресной группой ПЗУ матрицы-диаграммы когнитивных образов 6, первая группа данных которого подключена к входам дешифратора 7, а вторая группа данных подключена к адресному входу мультиплексора 9. Выход дешифратора 7 соединен с входом формирователя синтезирующих сигналов 8, выходы которого объединены с информационными входами мультиплексора 9, выход которого подключен к входу исполнительного устройства 10, контрольный выход которого соединен с устройством контроля параметров силовых элементов 11. Выход устройства контроля параметров силовых элементов 11 объединен с входами анализатора 2 и генератора временной зависимости 5, тактовые выходы которого соединены с входами синхронизации формирователя синтезирующих сигналов 8.
Заявляемый способ реализуется системой цветового представления и анализа динамики состояния многопараметрического объекта или процесса следующим образом.
Перед включением объекта 1 или запуском процесса осуществляется ввод с помощью задатчика параметров 3 массива реквизитов, соответствующего требуемому состоянию функционирования объекта или процесса. ПЗУ последовательности когнитивных образов GRij 4 включает в себя информацию о всех априори рассчитанных когнитивных образах, соответствующих последовательностям многозонных моделей, которые могут быть применены для управления при допустимых изменениях состояния функционирования многопараметрического объекта или процесса. Информация о выбранной последовательности передается на ПЗУ матрицы-диаграммы когнитивных образов 6, где из матрицы-диаграммы (фиг.1) выделяется группа когнитивных образов, которая будет использована для процедуры синтеза оптимальных управляющих воздействий u*. Посредством дешифратора 7 информация поступает на формирователь синтезирующих сигналов 8, который в зависимости от вида когнитивного образа управления и области существования решения задачи в пространстве синтезирующих переменных синтезирует функцию управления. Мультиплексор 8 осуществляет последовательную во времени коммутацию синтезируемых оптимальных управляющих воздействий u* для разных составляющих объекта управления или процесса, например электрических нагревательных элементов разной мощности.
Исполнительное устройство 10 на современных объектах чаще всего представляет собой группу мощных полупроводниковых коммутационных элементов, отклонение в работе от номинальных параметров которых может привести к аварийной ситуации. Предотвратить это позволяет устройство контроля параметров силовых элементов 11, которое в случае отклонения параметров коммутационных элементов от номинальных останавливает работу системы управления подачей соответствующей команды на вход генератора временной зависимости 5, а также визуализирует причину остановки посредством анализатора 2.
Генератор временной зависимости 5 выполняет функцию общей синхронизации работы задатчика параметров 3, ПЗУ последовательности когнитивных образов 4, ПЗУ матрицы-диаграммы когнитивных образов 6 и формирователя синтезирующих сигналов 8.
Текущее состояние объекта или процесса, включающее в себя когнитивные образы управления и наиболее важные параметры функционирования, визуализируется посредством анализатора 2.
Докажем эффективность предлагаемого способа и системы цветового представления и анализа динамики состояния многопараметрического объекта или процесса относительно прототипа. Теоретические и практические исследования показывают, что при оптимальном управлении уменьшение затрат энергии может достигать от 5% до 40% по сравнению с традиционно используемыми управляющими воздействиями [см. Аджиев М.Э. Энергосберегающие технологии. - М.: Энергоатомиздат, 1990. 64 с.; Аракелов В.Е., Кремер А.И. Методические вопросы экономии энергоресурсов. - М.: Энергоатомиздат, 1990. 188 с.].
Рассмотрим в качестве примера нагрев объекта - электрического нагревательного элемента - с минимумом затрат энергии. В процессе идентификации объекта, температурная характеристика z которого представлена на фиг.3, была получена многозонная модель (1).
Массив реквизитов для анализа энергосберегающего управления приведен в таблице №1.
Задача заключается в определении такого управления u*, которое обеспечит перевод объекта из начального состояния в конечное с минимумом затрат энергии

В результате полного анализа оптимального управления получаем когнитивный графический образ эквивалента состояния объекта (фиг.2). Полученный графический образ будет являться одним из элементов группы когнитивных образов, формирующих матрицу-диаграмму состояния многопараметрического объекта или процесса.
На следующем этапе осуществляется операция синтеза, в результате чего определяется область, в которой существует решение задачи оптимального управления, и в соответствии с этим определяется вид функции управления и ее энергоэффективность (таблица №2).
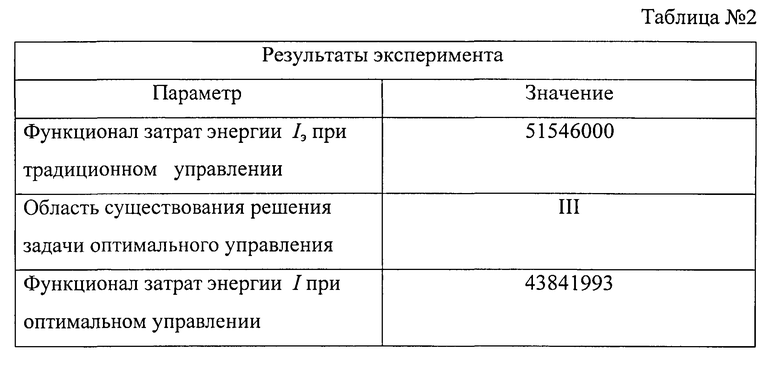
Вид функции оптимального управления в полученной области III будет определяться системой уравнений

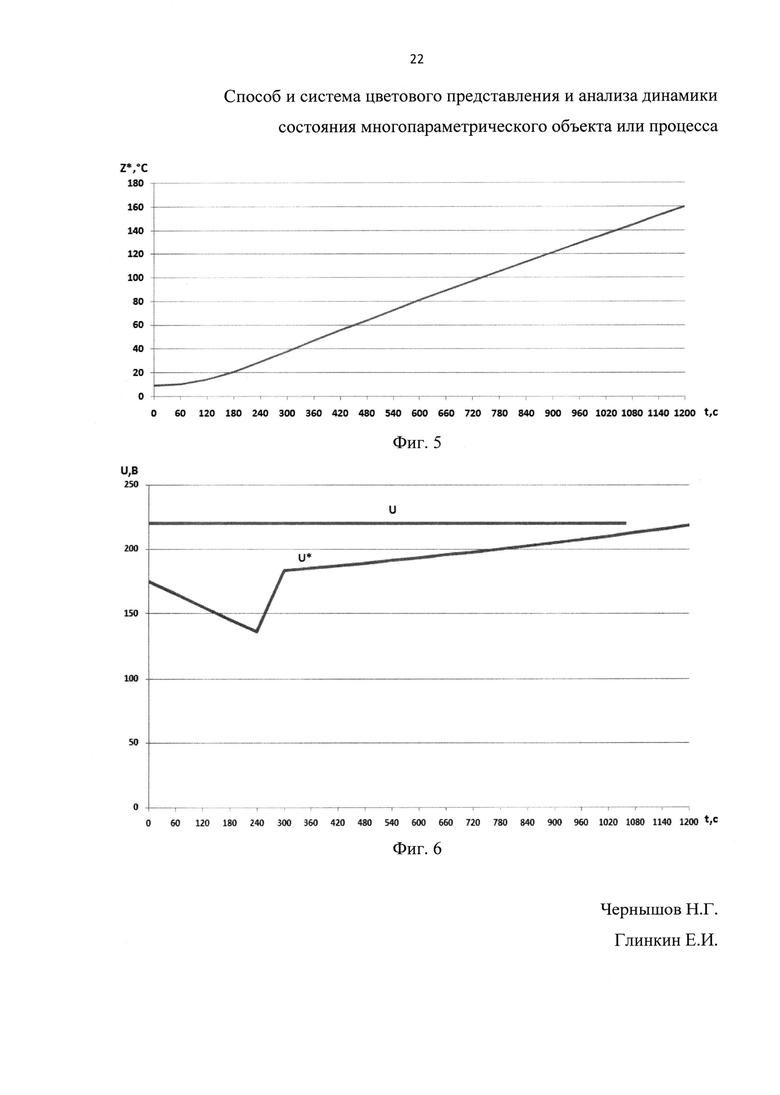
На фиг.5, фиг.6 и в таблице №3 приведены экспериментальные зависимости, отображающие изменение температуры нагревательной системы при традиционном и оптимальном управлении.
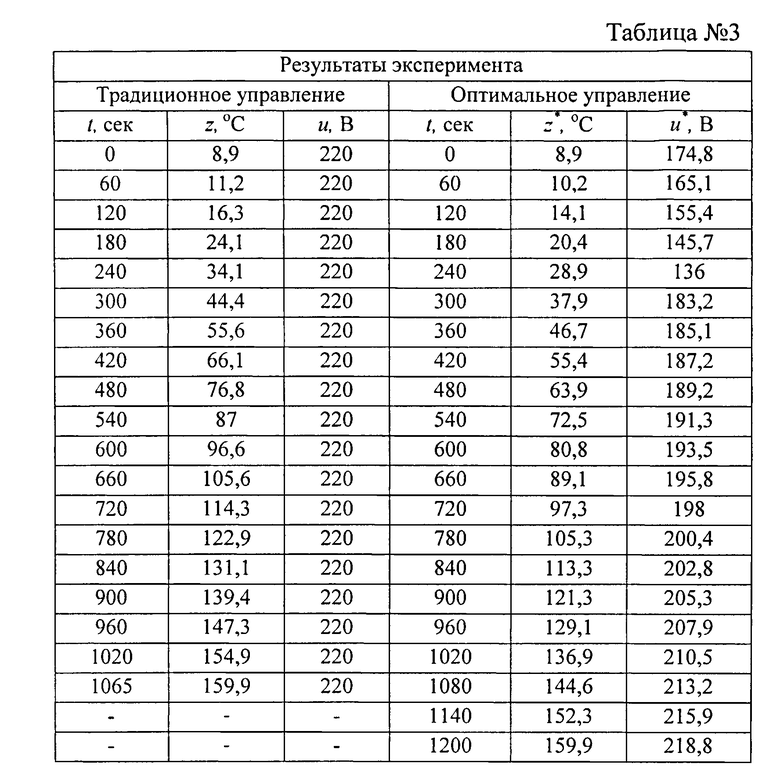
Таким образом, используя свойство инерционности объекта и несколько большее время нагрева при энергосберегающем управлении, получаем функционал затрат энергии I=43841993, что при сравнении с функционалом затрат энергии стандартного управления соответствует экономии электроэнергии, равной 14,9%

В случае многопараметрических гибридных объектов, включающих в себя несколько энергоемких потребителей, экономический эффект может быть существенно выше, достигая 30-50%.
Предлагаемый способ и система цветового представления и анализа динамики состояния многопараметрического объекта или процесса позволяют значительно упростить требования к системам управления, за счет того что сложная процедура анализа оптимального управления производится априори, а матрицу-диаграмму формируют в виде групп когнитивных образов эквивалентов состояний объекта или процесса и систематизируют в адресном пространстве ПЗУ тождественно образам эквивалентов множества состояний оптимального управления. Это существенно минимизирует микросхемотехнику, сокращает интеллектуальные, материальные и технологические затраты.
Реализация предлагаемого способа осуществлена с использованием системы цветового представления и анализа динамики состояния многопараметрического объекта или процесса, с применением экспертной системы энергосберегающего управления и автоматизированного рабочего места разработчика систем энергосберегающего управления.
Таким образом, предлагаемый способ, благодаря тому что матрицу-диаграмму формируют в виде групп когнитивных образов эквивалентов состояний объекта или процесса, систематизированных в адресном пространстве ПЗУ тождественно образам эквивалентов множества состояний оптимального управления, которые определяют априори из полного анализа процессов динамики оптимального управления объектом или процессом, описываемых многозонными моделями, с последующим применением групп когнитивных образов для синтеза в масштабе реального времени оптимальных энергосберегающих управляющих воздействий при любых изменениях динамики состояния многопараметрического объекта или процесса, в отличие от известных решений минимизирует затраты энергии от 5 до 40%, что повышает энергетическую эффективность оборудования, позволяет снизить затраты на алгоритмическое и аппаратное обеспечение системы управления, понизить требования к быстродействию системы, конфигурации микросхемотехники, а также свести к минимуму субъективизм принятия решений при смене состояний объекта или процесса, сделать возможным процедуру автоматического принятия решений и реализации адаптивных управляющих воздействий по результатам анализа когнитивной матрицы-диаграммы состояний исследуемого объекта с минимумом затрат энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО ДАННЫМ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403619C1 |
| СПОСОБ И УСТРОЙСТВО ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2009 |
|
RU2422873C2 |
| СПОСОБ ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА НЕЧЕТКОГО СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2013 |
|
RU2530297C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ДИАГНОСТИЧЕСКОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403618C1 |
| СПОСОБ И СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ДВОЙНОГО ИНТЕГРИРОВАНИЯ | 2010 |
|
RU2444040C2 |
| СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО ДАННЫМ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2125294C1 |
| СРЕДСТВО ЦВЕТОВОЙ ИДЕНТИФИКАЦИИ СОСТОЯНИЯ СИСТЕМЫ | 2023 |
|
RU2824435C1 |
| СПОСОБ ЦВЕТОВОГО ПРЕДСТАВЛЕНИЯ И АНАЛИЗА ДИНАМИКИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 1998 |
|
RU2150742C1 |
| СПОСОБ ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА НЕЧЕТКОГО СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 1999 |
|
RU2156496C1 |
| СПОСОБ ОПЕРАТИВНОГО АНАЛИЗА СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2204167C2 |
Изобретение относится к вычислительной технике. Технический результат - повышение энергетической эффективности оборудования, минимизация влияния субъективного фактора путем возможности автоматического принятия решений и реализации адаптивных управляющих воздействий по результатам анализа состояний исследуемого объекта. Для этого предложена система цветового представления и анализа динамики состояния многопараметрического объекта или процесса, которая дополнительно содержит ПЗУ последовательности когнитивных образов, ПЗУ матрицы-диаграммы когнитивных образов, дешифратор, мультиплексор, устройство контроля параметров силовых элементов, выходы фазовых координат объекта управления объединены в общую шину с анализатором и задатчиком параметров, выход которого управляет группой старших разрядов ПЗУ последовательности когнитивных образов, выход первой группы данных которого подключен к генератору временной зависимости, который синхронизирует задатчик параметров и управляет младшими адресными группами ПЗУ матрицы-диаграммы когнитивных образов и ПЗУ последовательности когнитивных образов. 6 ил., 3 табл.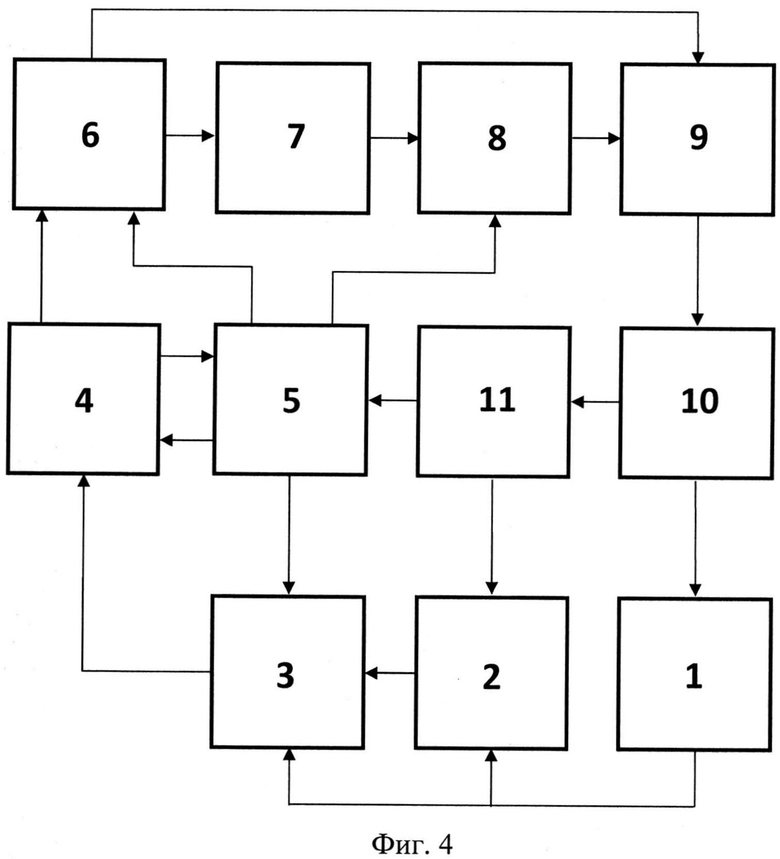
Система цветового представления и анализа динамики состояния многопараметрического объекта или процесса, содержащая задатчик параметров, формирователь синтезирующих сигналов, генератор временной зависимости, анализатор, исполнительное устройство и объект управления, выходы которого являются фазовыми координатами, а входы служат управляющими входами системы, отличающаяся тем, что дополнительно содержит ПЗУ последовательности когнитивных образов, ПЗУ матрицы-диаграммы когнитивных образов, дешифратор, мультиплексор, устройство контроля параметров силовых элементов, выходы фазовых координат объекта управления объединены в общую шину с анализатором и задатчиком параметров, выход которого управляет группой старших разрядов ПЗУ последовательности когнитивных образов, выход первой группы данных которого подключен к генератору временной зависимости, который синхронизирует задатчик параметров и управляет младшими адресными группами ПЗУ матрицы-диаграммы когнитивных образов и ПЗУ последовательности когнитивных образов, выход второй группы данных которого объединен со старшей адресной группой ПЗУ матрицы-диаграммы когнитивных образов, первая группа данных которого поступает на дешифратор, вторая - на адресные входы мультиплексора, сигнал с дешифратора подается на формирователь синтезирующих сигналов, выходы которого объединены с информационными входами мультиплексора, выход которого подключен к объекту управления посредством исполнительного устройства, контрольный выход которого соединен с устройством контроля параметров силовых элементов, выходы которого объединены со входами анализатора и генератора временной зависимости, тактовые выходы которого соединены с входами синхронизации формирователя синтезирующих сигналов.
| СПОСОБ ЦВЕТОВОГО ПРЕДСТАВЛЕНИЯ И АНАЛИЗА ДИНАМИКИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 1998 |
|
RU2150742C1 |
| СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО ДАННЫМ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403619C1 |
| Актуальные проблемы развития и эксплуатации поршневых двигателей в транспортном комплексе Азиатско-Тихоокеанского региона, международная научно-техническая конференция "двигатели 2008", Хабаровск, 2008, 372 стр., [онлайн], найдено 08.09.2014, найдено в Интернет: URL: | |||

