Предлагаемое изобретение относится к измерительной технике, в частности к отображению диагностической информации управления технологическим оборудованием.
Известен способ отображения диагностической информации одновременно на нескольких индикаторных приборах в цифро-буквенной форме [см. кн. Электрические измерения/Под ред. В.Н.Малиновского. - М.: Энергоиздат, 1982. - С.373-375]. Каждому измеряемому параметру соответствует свое средство отображения. Функции оператора заключаются в одновременном контроле за всеми средствами отображения.
Недостатками этого способа являются рассредоточение информации на разнесенных в пространстве устройствах отображения, невозможность оператора эффективно выполнять функцию параллельного контроля всех переменных.
Существует способ централизованного отображения диагностической информации [см. кн. Теория автоматического управления / Под ред. Ю.М.Соломенцева. - М.: Высшая школа, 2000. - С.202-205], представляемой в графической и цифро-буквенной форме на экране монитора и в виде рекомендаций оператору. Способ заключается в оценке оператором качественных и количественных характеристик измеряемых величин и получении от системы рекомендаций по необходимым к выполнению действиям.
Недостатками этого способа являются низкая оперативность в выполнении команд и процедур, необходимых для оценки работы системы и ее коррекции, дорогостоящее программное и аппаратное обеспечение и сложность комплексной оценки поступающей информации, представляемой в разнородной форме.
За прототип принят способ отображения диагностической информации [см. патент РФ по заявке № 97118820, ПМК G01D 7/02, опубликован 1999.08.20], заключающийся в представлении диагностической информации на средствах отображения электронно-вычислительной техники. Осуществляют одновременную обработку и отображение всей диагностической информации или необходимой ее части в виде когнитивной цветокодовой матрицы состояний исследуемого объекта, формируемой по данным диагностической информации и представляющей собой множество графиков диагностической информации, каждый из которых представляют в виде полосы со значениями в шкале цветового спектра при условии, что каждому значению амплитуды диагностической информации соответствует определенный цвет шкалы цветового спектра.
Недостатком прототипа является низкая энергетическая эффективность технологического оборудования с минимумом затрат энергии, микросхемотехники из-за невозможности автоматического принятия решений, в том числе в масштабе реального времени и реализации адаптивных управляющих воздействий по результатам анализа цветокодовой матрицы состояний исследуемого объекта с минимумом затрат энергии.
Технической задачей способа является повышение энергетической эффективности технологического оборудования с минимумом затрат энергии, микросхемотехники, а именно снижение затрат на аппаратное обеспечение системы управления и минимизация влияния субъективного фактора в процессе принятия решений, возможность автоматического принятия решений и реализация адаптивных управляющих воздействий по результатам анализа цветокодовой матрицы состояний исследуемого объекта с минимумом затрат энергии.
Поставленная техническая задача достигается тем, что в способе отображения диагностической информации, заключающемся в представлении диагностической информации на средствах электронно-вычислительной техники, осуществлении одновременной обработки и отображении всей диагностической информации или необходимой ее части в виде когнитивной кодовой матрицы состояний {Ф}={L*А} исследуемого объекта, формируемой по данным диагностической информации, в отличие от прототипа когнитивный графический образ кодовой матрицы формируют в адресном пространстве постоянного запоминающего устройства в виде образов эквивалентов множества состояний оптимального управления, которые находят априори из полного анализа процессов динамики оптимального управления объектом, описываемой моделью апериодического звена, а затем используют для синтеза в масштабе реального времени энергосберегающих управляющих воздействий при любых изменениях состояний функционирования и условий процесса, где L - суммарное управление, взвешенное по экспоненте, А - нормированная инерционность.
Сущность предлагаемого способа отображения диагностической информации (см. фиг.1-3) заключается в представлении диагностической информации на средствах электронно-вычислительной техники, осуществлении одновременной обработки и отображении всей диагностической информации или необходимой ее части в виде когнитивной кодовой матрицы (фиг.1) состояний {Ф}={L*A} исследуемого объекта, формируемой по данным диагностической информации (фиг.3).
Для повышения энергетической эффективности технологического оборудования с минимумом затрат энергии, микросхемотехники когнитивный графический образ кодовой матрицы (фиг.1) формируют и адресном пространстве постоянного запоминающего устройства (ПЗУ) в виде образов эквивалентов множества состояний оптимального управления, которые находят априори из полного анализа процессов динамики оптимального управления объектом, описываемой моделью апериодического звена. Это позволяет исключить процедуру анализа оптимального управления при проведении эксперимента в реальном масштабе времени, тем самым значительно упростить, работу оператора и понизить требования к техническим средствам, реализующим управление.
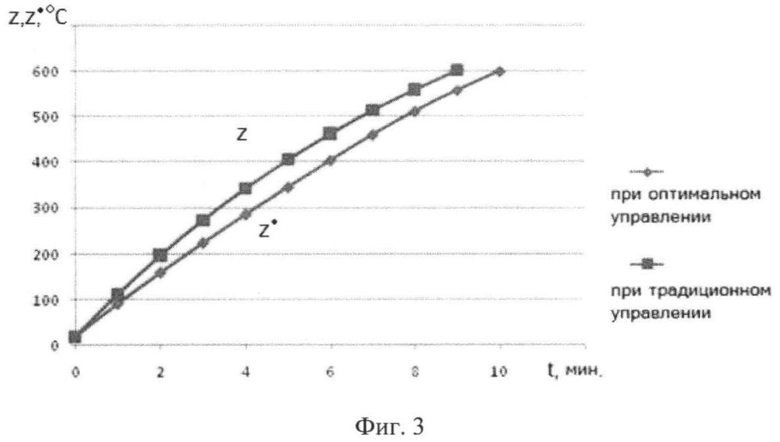
Образы эквивалентов управления (фиг.2) используют для синтеза в масштабе реального времени энергосберегающих управляющих воздействий при любых изменениях состояний функционирования и условий процесса, отражаемого когнитивным графическим образом ПЗУ и кодовой матрицей (фиг.1), где L - суммарное управление, взвешенное по экспоненте, А - нормированная инерционность. Поясним предлагаемый способ на примере оптимального управления динамическим процессом электрооборудования.
Процесс динамики электрических нагревателей и электродвигателей может быть описан дифференциальным уравнением

где z представляет собой фазовую координату, параметр а характеризует инерционность объекта управления, параметр b - коэффициент усиления управляющего воздействия u(t).
Для определения оптимальных управляющих воздействий u, реализующих оптимальное энергосберегающее управление по переводу объекта из начального состояния z0 в конечное zk, необходима сложная двухэтапная процедура, состоящая из анализа и синтеза оптимального управления в реальном масштабе времени.
Получаемые результаты анализа оптимального управления на множестве состояний функционирования служат основой базы знаний для широкого круга задач разработки алгоритмического обеспечения систем энергосберегающего управления различными динамическими объектами. Для выполнения процедуры анализа оптимального управления оператором вводятся исходные данные для решения задачи

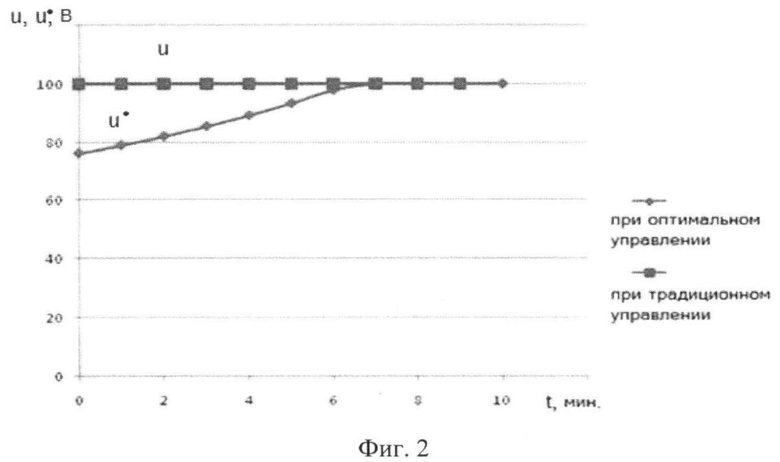
Результатом анализа является получение когнитивного образа в виде цветокодовой матрицы {Ф}=(L*A} областей существования управлений (фиг.1). Границы областей определяются функциями
в пространстве, определяемом параметром А и синтезирующей функцией L, характеризующей суммарное управление взвешенное по экспоненте

Разность Δu между высшим и низшим порогом управляющего воздействия определяется как


при изменении времени на интервале от начального значения t0 до конечного tk

а суммарное напряжение является суммой низшего и высшего порога управления

Анализ оптимального управления охватывает широкий круг задач, связанных с исследованиями вопросов существования решения, устойчивости, определения возможных видов функций оптимального управления, и множество других задач. Выполнение процедуры анализа оптимального управления требует сложных алгоритмических и математических расчетов и, как следствие, дорогостоящих высокопроизводительных микропроцессорных технических средств. Это является препятствием к оперативному выбору оператором оптимальной управляющей функции в масштабе реального времени.
Из полученных на основе полного анализа областей I, II, III, IV, V, VI, VII, VIII, IX, X, XI, XII (фиг.1) областями, для которых существует оптимальное управление, будут являться области I, II, III, IV, V, VI, VII, VIII.
Следовательно, синтез управляющих воздействий осуществляется по результатам полного анализа, проведенного априори и представленного в виде когнитивного графического образа {Ф}={L*A}, сформированного в адресном пространстве L*A постоянного запоминающего устройства системы управления, по массиву исходных данных реквизитов задачи оптимального управления, вводимых оператором (2).
Используя параметр инерционности объекта (10) и синтезирующую функцию (9), определяем область (фиг.1), в которую попадает точка S с координатами (L, A). Каждой области соответствует определенная функция управления.
В случае если оптимальное управление не найдено, т.е. координаты точки S=(L, A) принадлежат области IX, X, XI или XII когнитивного графического образа, то оператором осуществляется перевод системы управления из оптимального в традиционный для данной технологической установки режим функционирования. На фиг.1 приведены примеры точек Sx и Sy, для которых соответственно существует и не существует оптимальное энергосберегающее управление.
В зависимости от требований к функционированию технологической установки оператор, используя когнитивный графический образ {Ф}={L*A}, представленный в виде цветокодовой матрицы L*A состояний объекта, может как самостоятельно в зависимости от состояния функционирования выбирать функцию управления, так и переводить систему в автоматический режим при любых изменениях состояния функционирования.
Докажем эффективность предлагаемого способа отображения диагностической информации относительно прототипа. В связи с ростом цен на электроэнергию и топливо, усилением конкурентной борьбы между фирмами, производящими энергоемкое оборудование, транспортные средства и другие машины, а также учитывая сложность социально-экономической обстановки, актуальность задач экономии и рационального использования энергоресурсов с каждым годом возрастает [см. кн. Кириллкин В.А. Энергетика. Главные проблемы. М.: Энергетика, 1985. 87 с., Рэй Д. Экономия энергии в промышленности. / Пер. с англ. М., 1985. 212 с.]. Проблема экономии топливно-энергетических ресурсов занимает важное место в тематике работ научно-исследовательских организаций, проектных и промышленных фирм всех стран мира. Количество потребляемых населением Земли энергоресурсов постоянно возрастает, однако эффективность использования их остается достаточно низкой. Вместе с тем обостряется проблема загрязнения окружающей среды, быстро уменьшаются запасы высокоэнергетического сырья, и растет стоимость получения энергии.
К наиболее энергоемким объектам относятся тепловые аппараты, машины с электроприводами, т.е. большинство видов технологических установок в машиностроительной, химической, металлургической, строительной и других отраслях промышленности. Затраты на электроэнергию при эксплуатации этих объектов для большинства промышленных предприятий относятся к числу основных и становятся сопоставимыми с затратами на сырье. Миллионы разнообразных энергоемких объектов значительную долю времени работают в динамических режимах, это позволяет снижать их энергопотребление за счет оптимального управления в различных состояниях функционирования.
Одним из направлений повышения эффективности функционирования технологических установок является снижение затрат энергии при любых изменениях состояний их функционирования и условий процесса.
Теоретические исследования и практические результаты показывают, что при оптимальном управлении уменьшение затрат энергии может достигать от 5% до 40% по сравнению с традиционно используемыми управляющими воздействиями [см. Муромцев Ю.Л., Чернышов Н.Г., Орлова Л.П. Математическое и программное обеспечение микропроцессорных систем энергосберегающего управления // Автоматика и вычислительная техника. 1996. № 6. С.26-34; Чернышов Н.Г., Артемова С.В. Система энергосберегающего управления процессами нагрева энергоемких объектов // Автоматика и вычислительная техника. 2001. №3. С.26-33]. Кроме того, в динамических режимах, характеризуемых меньшими энергетическими затратами, снижаются механические и тепловые нагрузки, что ведет к повышению долговечности и безопасности эксплуатации объектов.
Значительно более простая процедура задания массива исходных данных задачи оптимального управления позволяет визуализировать получаемую функцию управления в зависимости от выбранного состояния функционирования объекта, что позволяет оператору более эффективно осуществлять контроль за объектом, а также реализовать энергосберегающее управление объектом. При переводе системы управления в автоматический режим оператору предоставляется информация как о состоянии функционирования, так и о координатах точки L на когнитивном графическом образе областей управления (фиг.1)
В качестве примера рассмотрим перевод теплового объекта - нагревательного элемента - из начального состояния z0 в конечное zk за время Δt с минимумом затрат энергии. Массив реквизитов для анализа энергосберегающего управления приведены в таблице 1.
IЭ - функционал (лимит) затрат энергии при традиционном управлении (фиг.2) на временном интервале

где t1 - время, при котором объект выходит в рабочий режим при традиционном управлении.
Следовательно, задача заключается в определении такого управления, которое обеспечит перевод объекта из начального состояния в конечное с минимумом затрат энергии
В результате проведения полного анализа оптимального управления получаем цветокодовую матрицу в виде образов эквивалентов множества состояний оптимального управления (фиг.1).
Далее когнитивный графический образ кодовой матрицы формируют в адресном пространстве постоянного запоминающего устройства в виде образов эквивалентов множества состояний оптимального управления.
На следующем этапе осуществляется операция синтеза, в результате чего получаем координаты точки S (фиг.1, таблица 2) и в соответствии с координатами полученной точки осуществляется выбор вида функции управления и ее синтез (фиг.2, таблица 3).
На фиг.3 и в таблице 3 приведены зависимости, отображающие изменение температуры нагревательной системы при традиционном и оптимальном управлении.
Таким образом, используя свойство инерционности объекта и несколько большее время нагрева при энергосберегающем управлении, получаем функционал затрат энергии I=82254, что при сравнении с функционалом затрат энергии стандартного управления соответствует экономии электроэнергии, равной 8,6%.

Используемый способ отображения диагностической информации позволяет значительно упростить требования к системе управления динамическими режимами технологического оборудования за счет того, что сложная процедура анализа оптимального управления производится априори, в результате чего когнитивный графический образ кодовой матрицы записывается в постоянное запоминающее устройство и не требуется его определение в процессе управления.
Реализация предлагаемого способа осуществлена на базе микропроцессорного контроллера ZILA и построенного на базе экспертной системы энергосберегающего управления автоматизированного рабочего места разработчика систем энергосберегающего управления. На стадии отладки микропроцессорный контроллер функционирует совместно с персональным компьютером, а в рабочем режиме - автономно. Информация о координатах точки в пространстве синтезирующих переменных и выбранном в соответствии с этим видом управления выводится на встроенный экран микропроцессорного контроллера или цветной монитор оператора автоматизированного рабочею места.
Таким образом, предлагаемый способ, согласно которому формируют когнитивный графический образ кодовой матрицы в адресном пространстве постоянного запоминающего устройства в виде нормируемых эквивалентов множества состояний оптимального управления, которые находят априори из полного анализа процессов динамики оптимального управления объектом, а затем данный образ используют для синтеза в масштабе реального времени энергосберегающих управляющих воздействий, в отличие от известных решений экономит электроэнергию от 5 до 40%, что повышает энергетическую эффективность технологического оборудования с минимумом затрат энергии. Это позволяет снизить затраты на аппаратное обеспечение системы управления вследствие пониженных требований к быстродействию системы, конфигурации микросхемотехники, а также свести к минимуму влияние субъективизма при принятии решений, сделать возможной процедуру автоматического принятия решений за счет реализации адаптивных управляющих воздействий по результатам анализа цветокодовой матрицы состояний исследуемого объекта с минимумом затрат энергии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО ДАННЫМ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403619C1 |
| СПОСОБ И УСТРОЙСТВО ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2009 |
|
RU2422873C2 |
| СПОСОБ И СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ДВОЙНОГО ИНТЕГРИРОВАНИЯ | 2010 |
|
RU2444040C2 |
| СПОСОБ И СИСТЕМА ЦВЕТОВОГО ПРЕДСТАВЛЕНИЯ АНАЛИЗА ДИНАМИКИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2014 |
|
RU2580813C2 |
| СПОСОБ ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА НЕЧЕТКОГО СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2013 |
|
RU2530297C1 |
| СРЕДСТВО ЦВЕТОВОЙ ИДЕНТИФИКАЦИИ СОСТОЯНИЯ СИСТЕМЫ | 2023 |
|
RU2824435C1 |
| СПОСОБ ОПЕРАТИВНОГО АНАЛИЗА УСТОЙЧИВОСТИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2176811C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ МНОГОФУНКЦИОНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1996 |
|
RU2128357C1 |
| СПОСОБ СЛОВЕСНО-ЛОГИЧЕСКОГО ПРЕДСТАВЛЕНИЯ И АНАЛИЗА ДИНАМИКИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2002 |
|
RU2261468C2 |
| СПОСОБ ОПЕРАТИВНОГО АНАЛИЗА СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2204167C2 |
Изобретение относится к измерительной технике, в частности к отображению диагностической информации управления технологическим оборудованием. Когнитивный графический образ кодовой матрицы формируют в адресном пространстве постоянного запоминающего устройства в виде образов эквивалентов множества состояний оптимального управления. Данный образ затем используется для синтеза в масштабе реального времени энергосберегающих управляющих воздействий технологическим оборудованием с учетом изменений состояний функционирования и условий процесса. Техническим результатом способа является повышение энергетической эффективности технологического оборудования с минимумом затрат энергии, микросхемотехники, снижение затрат на аппаратное обеспечение системы управления, минимизация влияния человеческого фактора в процессе принятия решений, возможность автоматического принятия решений и реализации сложных управляющих воздействий по результатам анализа цветокодовой матрицы состояний исследуемого объекта с минимумом затрат энергии. 3 ил., 3 табл.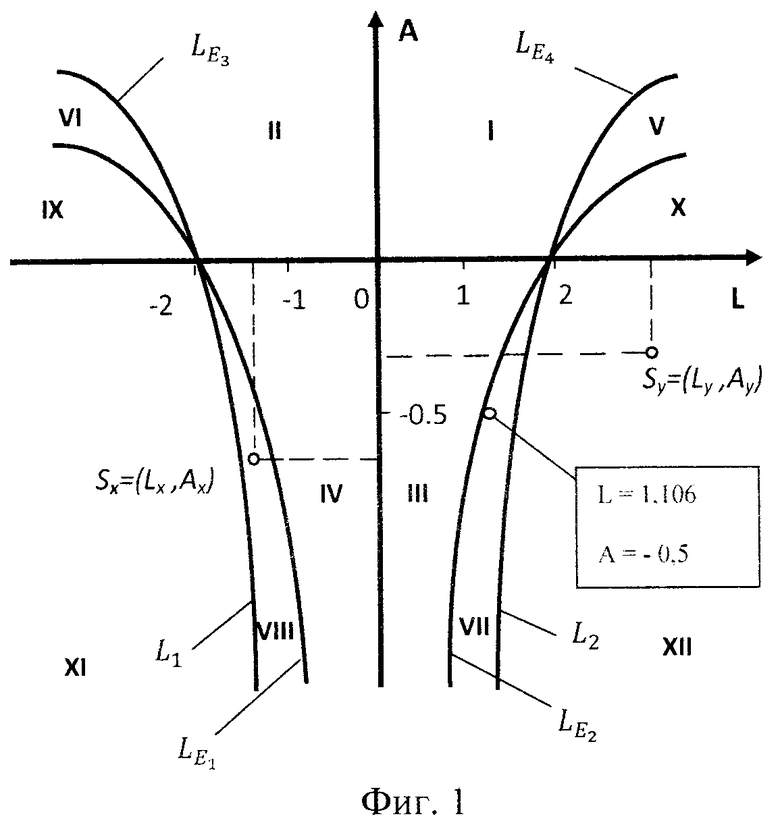
Способ отображения диагностической информации, заключающийся в представлении диагностической информации на средствах электронно-вычислительной техники, осуществлении одновременной обработки и отображении всей диагностической информации или необходимой ее части в виде когнитивной кодовой матрицы состояний {Ф}={L·A} исследуемого объекта (системы), формируемой по данным диагностической информации, отличающийся тем, что когнитивный графический образ кодовой матрицы формируют в адресном пространстве постоянного запоминающего устройства в виде образов эквивалентов множества состояний оптимального управления, которые находят априори из полного анализа процессов динамики оптимального управления объектом, описываемой моделью апериодического звена, а затем используют для синтеза в масштабе реального времени энергосберегающих управляющих воздействий при любых изменениях состояний функционирования и условий процесса, где L - суммарное управление, взвешенное по экспоненте, А - нормированная инерционность.
| RU 97118820 A, 20.08.1999 | |||
| Триангуляционная вышка | 1930 |
|
SU19335A1 |
| CN 101256848 A, 03.09.2008 | |||
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ОБ ОБЪЕКТАХ КОНТРОЛИРУЕМОГО ДИСПЕТЧЕРСКОГО КРУГА | 1996 |
|
RU2107940C1 |

