Область техники
Настоящее изобретение относится к системе управления движением для транспортного средства.
Уровень техники
Подвески передних колес, которые имеют препятствующую продольному наклону кузова геометрию, и подвески задних колес, которые имеют препятствующую продольному подъему кузова геометрию, хорошо известны в данной области техники для ограничения галопирования транспортного средства, которое возникает в течение периода торможения из-за применения тормозов. С помощью таких подвесок передних и задних колес реализуются препятствующий продольному наклону кузова эффект, который ограничивает наклон кузова транспортного средства (явление "оседания" передней стороны кузова транспортного средства) в течение период торможения, и препятствующий продольному подъему кузова эффект, который ограничивает подъем корпуса транспортного средства (явление "плавания" задней стороны корпуса транспортного средства) в течение периода торможения, чтобы галопирование была ограничена. В дальнейшем термины "препятствующий продольному наклону кузова" и "препятствующий продольному подъему кузова" также могут вместе называться "препятствующий галопированию".
Возможно приспособить препятствующую галопированию геометрию, которая демонстрирует большой препятствующий галопированию эффект для силы торможения, приложенной к колесам транспортного средства, к увеличению степени ограничения галопирования. Однако когда адаптируется препятствующая галопированию геометрия, которая демонстрирует чрезмерно большой препятствующий галопированию эффект, степень проведения направленной с передней на заднюю ось силы транспортного средства, которая исходно применяется к точкам контакта с землей у колес (шин) транспортного средства во время управления транспортным средством, например, на плохой дороге, к кузову транспортного средства увеличивается как вертикальная сила. Это может привести к ухудшению ощущения от поездки у пассажира(ов) транспортного средства. Другими словами, ощущение от поездки у пассажира(ов) ухудшается в течение времени управления транспортным средством без применения тормозов (не относящийся к торможению период).
В силу этого требуется приспособить препятствующую галопированию геометрию, которая не демонстрирует большого препятствующего галопированию эффекта, для поддержания хорошего ощущения от поездки у пассажира(ов) во время не относящегося к торможению периода, и которая эффективно ограничивает галопирование во время периода торможения. Ввиду этого, например в нерассмотренной публикации патента Японии № H11-151921 и нерассмотренной публикации патента Японии № H06-64436, перемещения и расположения компонентов подвески, которые задают препятствующую галопированию геометрию, изменяются во время периода торможения для увеличения препятствующего галопированию эффекта у препятствующей галопированию геометрии. Таким образом, галопирование эффективно ограничивается во время периода торможения наряду с поддержанием хорошего ощущения от поездки у пассажира(ов) во время не относящегося к торможению периода.
Однако в системах, описанных в нерассмотренной публикации патента Японии № H11-151921 и нерассмотренной публикации патента Японии № H06-64436, перемещения и расположения компонентов подвески изменяются во время периода торможения, и в связи с этим необходимо устанавливать специализированный механизм для реализации этих потребностей в подвесках. Это невыгодно увеличит затраты производства и ухудшит возможность установки системы на транспортное средство и возможность производства системы.
Краткое описание изобретения
Настоящее изобретение направляет усилия на вышеупомянутый недостаток. Таким образом, целью настоящего изобретения является предоставление системы управления движением транспортного средства, которая может эффективно ограничивать галопирование во время периода торможения транспортного средства и может поддерживать хорошее ощущение от поездки у пассажира(ов) во время не относящегося к торможению периода транспортного средства без предоставления специализированного механизма в подвесках транспортного средства.
Для достижения цели настоящего изобретения может быть предоставлена система управления движением для транспортного средства, включающая по меньшей мере одну подвеску передних колес, по меньшей мере одну подвеску задних колес, устройство управления тормозами, исполнительный орган тормозов, средство реализации основного распределения и по меньшей мере одно из средства управления первым распределением и средства управления вторым распределением. По меньшей мере одна подвеска передних колес предоставляется множеству передних колес транспортного средства и имеет препятствующую продольному наклону кузова геометрию. По меньшей мере одна подвеска задних колес предоставляется множеству задних колес транспортного средства и имеет препятствующую продольному подъему кузова геометрию. Изменение в степени препятствующего продольному подъему кузова эффекта в препятствующей продольному подъёму кузова геометрии относительно изменения в силе торможения заднего колеса, соответственно приложенной к множеству задних колес, больше чем изменение в степени препятствующего продольному наклону кузова эффекта в препятствующей продольному наклону кузова геометрии относительно изменения в силе торможения переднего колеса, соответственно приложенной к множеству передних колес. Устройство управления тормозами действует для независимого применения и управления силой торможения переднего колеса и силой торможения заднего колеса. Средство реализации основного распределения предназначено для управления устройством управления тормозами во время приведения в действие водителем исполнительного органа тормозов транспортного средства. Средство реализации основного распределения управляет устройством управления тормозами из условия, чтобы сумма силы торможения переднего колеса и силы торможения заднего колеса стала требуемым значением, которое соответствует степени приведения в действие исполнительного органа тормозов водителем, и распределение силы торможения между множеством передних колес и множеством задних колес стало основным распределением. Основное распределение является одним из распространения, которое равно теоретическому распределению, которое реализует одновременную блокировку множества передних колес и множества задних колес, и распределению, при котором сила торможения заднего колеса меньше таковой у теоретического распределения. Средство управления первым распределением предназначено для управления устройством управления тормозами из условия, чтобы сумма силы торможения переднего колеса и силы торможения заднего колеса стала требуемым значением, и распределение силы торможения между множеством передних колес и множеством задних колес стало первым распределением, при котором сила торможения заднего колеса больше, чем таковая у основного распределения. Средство управления первым распределением начинает управление устройством управления тормозами, когда скорость изменения в степени приведения в действие исполнительного органа тормозов для применения сил торможения переднего и заднего колес становится больше заранее установленной скорости. Средство управления первым распределением прекращает управление устройством управления тормозами, когда угловое ускорение угла наклона кузова транспортного средства в транспортном средстве переходит из положительного диапазона в отрицательный диапазон. Угол наклона кузова транспортного средства задается так, что когда передняя сторона кузова транспортного средства наклоняется вниз, угол наклона кузова транспортного средства находится в положительном диапазоне. Средство управления вторым распределением предназначено для управления устройством управления тормозами из условия, чтобы сумма силы торможения переднего колеса и силы торможения заднего колеса стала требуемым значением, и распределение силы торможения между множеством передних колес и множеством задних колес стало вторым распределением, при котором сила торможения заднего колеса меньше, чем таковая у основного распределения. Средство управления вторым распределением начинает управление устройством управления тормозами, когда скорость изменения в степени приведения в действие исполнительного органа тормозов для ослабления сил торможения переднего и заднего колес становится больше заранее установленной скорости. Средство управления вторым распределением прекращает управление устройством управления тормозами, когда угловое ускорение угла наклона кузова транспортного средства переходит из отрицательного диапазона в положительный диапазон. Основное распределение может быть распределением, при котором сила торможения заднего колеса сохраняется относительно малой, чтобы не возникла блокировка задних колес.
С помощью вышеупомянутой конструкции во время периода торможения (рабочий период исполнительного органа тормозов) сила торможения, примененная соответственно к множеству передних колес, и сила торможения, примененная соответственно к множеству задних колес, обычно регулируются из условия, чтобы сумма силы торможения, примененной соответственно к множеству передних колес, и силы торможения, примененной соответственно к множеству задних колес, стала требуемым значением, которое соответствует степени приведения в действие исполнительного органа тормозов водителем, и распределение силы торможения между множеством передних колес и множеством задних колес стало основным распределением.
В отличие от этого в состоянии, где скорость увеличения степени приведения в действие исполнительного органа тормозов (например, величина действующей силы или рабочего хода) во время начала приведения в действие исполнительного органа тормозов водителем больше заранее установленной скорости, то есть в состоянии, где угол наклона демонстрирует большую разладку во время начала внезапного применения тормозов, сила торможения, примененная соответственно к множеству передних колес и сила торможения, примененная соответственно к множеству задних колес, обычно регулируются так, что сумма силы торможения, примененной соответственно к множеству передних колес и силы торможения, примененной соответственно к множеству задних колес, сохраняется в требуемом значении, и распределение силы торможения между множеством передних колес и множеством задних колес становится первым распределением, при котором сила торможения, примененная соответственно к множеству задних колес, больше таковой у основного распределения. То есть, в первом распределении часть силы торможения, которую нужно применить соответственно к множеству передних колес, передается силе торможения, которую нужно применить соответственно к множеству задних колес. Таким образом, сила торможения, примененная соответственно к множеству передних колес, уменьшается, а сила торможения, примененная соответственно к множеству задних колес, увеличивается на величину, которая равна величине уменьшения в силе торможения, примененной соответственно к множеству передних колес. Сумма силы торможения, примененной соответственно к множеству передних колес, и силы торможения, примененной соответственно к множеству задних колес, сохраняется в том же значении (= требуемом значении), которое аналогично значению у основного распределения.
Здесь вообще препятствующий галопированию эффект (препятствующая галопированию сила, препятствующий галопированию момент) в препятствующей галопированию геометрии увеличивается, так как увеличивается сила торможения, примененная соответственно к колесам. К тому же, как описано выше, изменение в степени препятствующего продольному подъему кузова эффекта (препятствующей продольному подъему кузова силы, препятствующего продольному подъему кузова момента) в препятствующей продольному подъёму кузова геометрии больше изменения в степени препятствующего продольному наклону кузова эффекта (препятствующей продольному наклону кузова силы, препятствующего продольному наклону кузова момента).
Поэтому величина увеличения в степени препятствующего продольному подъему кузова эффекта, вызванного увеличением силы торможения, примененной соответственно к множеству задних колес, при переходе основного распределения в первое распределение становится больше, чем величина уменьшения в степени препятствующего продольному наклону кузова эффекта, вызванного уменьшением силы торможения, примененной соответственно к множеству передних колес, при переходе основного распределения в первое распределение. То есть, когда рассматривается все транспортное средство, в состоянии первого распределения препятствующий галопированию эффект увеличивается по сравнению с таковым у основного распределения. Особенно становится трудным увеличение угла наклона.
С помощью вышеприведенного заключения в состоянии, где угол наклона, возможно, может демонстрировать большую разладку при начале внезапного применения тормозов, распределение силы торможения между множеством передних колес и множеством задних колес переходит от основного распределения к первому распределению. Таким образом, препятствующий галопированию эффект может быть увеличен, чтобы ограничить увеличение в угле наклона без необходимости предоставления специализированного механизма для подвесок. В результате галопирование (разладка в угле наклона) во время периода торможения эффективно ограничивается наряду с сохранением хорошего ощущения от поездки у пассажира(ов) во время не относящегося к торможению периода путем адаптации подвесок, которые имеют препятствующую галопированию геометрию, которая не демонстрирует большой препятствующий галопированию эффект.
К тому же с помощью вышеупомянутой конструкции период времени для приведения распределения силы торможения между множеством передних колес и множеством задних колес к первому распределению ограничивается периодом времени между временем начала внезапного применения тормозов и временем перехода углового ускорения угла наклона из положительного диапазона в отрицательный диапазон (то есть временем перехода от увеличивающегося состояния угловой скорости угла наклона к уменьшающемуся состоянию угловой скорости угла наклона). Здесь, как будет описываться далее, когда период времени для регулировки распределения тормозного усилия между множеством передних колес и множеством задних колес ограничивается описанным выше способом, можно ускорить сходимость движения галопирования (см. фиг. 5А - 5С). Таким образом, распределение тормозного усилия между множеством передних колес и множеством задних колес может быть возвращено к основному распределению на раннем этапе при ускорении сходимости движения галопирования.
Также с помощью вышеупомянутой конструкции основное распределение задается в качестве распределения, которое равно теоретическому распределению для блокировки множества передних колес и множества задних колес одновременно, или задается в качестве распределения, при котором сила торможения, примененная соответственно к множеству задних колес, меньше таковой у теоретического распределения. Таким образом, можно ограничить возникновение блокировки множества задних колес раньше блокировки множества передних колес в течение периода времени управления распределением силы торможения между множеством передних колес и множеством задних колес к основному распределению.
Кроме того, с помощью средства управления вторым распределением в состоянии, где скорость уменьшения степени приведения в действие исполнительного органа тормозов (например, величина действующей силы или рабочего хода) во время приведения в действие исполнительного органа тормозов водителем меньше заранее установленной скорости, то есть в состоянии, где угол наклона демонстрирует большую разладку во время начала внезапного отпускания тормозов, распределение силы торможения между множеством передних колес и множеством задних колес переходит во второе распределение, при котором сила торможения, примененная соответственно к множеству задних колес, меньше таковой у основного распределения. В частности, в состоянии второго распределения часть силы торможения, которую нужно применить соответственно к множеству задних колес, передается силе торможения, которую нужно применить соответственно к множеству передних колес. Таким образом, сила торможения, примененная соответственно к множеству задних колес, уменьшается, а сила торможения, примененная соответственно к множеству передних колес, увеличивается на величину, которая равна величине уменьшения в силе торможения, примененной соответственно к множеству задних колес. Сумма силы торможения, примененной соответственно к множеству передних колес, и силы торможения, примененной соответственно к множеству задних колес, сохраняется в том же значении (= требуемом значении), которое аналогично значению у основного распределения.
Поэтому величина уменьшения в степени препятствующего продольному подъему кузова эффекта, вызванного уменьшением силы торможения, примененной соответственно к множеству задних колес, при переходе основного распределения во второе распределение становится больше, чем величина увеличения в степени препятствующего продольному наклону кузова эффекта, вызванного увеличением силы торможения, примененной соответственно к множеству передних колес, при переходе основного распределения во второе распределение. То есть, когда рассматривается все транспортное средство, в состоянии второго распределения препятствующий галопированию эффект уменьшается по сравнению с таковым у основного распределения. Особенно становится трудным уменьшение угла наклона.
С помощью вышеприведенного заключения в состоянии, где угол наклона, возможно, может демонстрировать большую разладку при начале внезапного отпускания тормозов, распределение силы торможения между множеством передних колес и множеством задних колес переходит от основного распределения ко второму распределению. Таким образом, препятствующий галопированию эффект может быть уменьшен, чтобы ограничить уменьшение в угле наклона без необходимости предоставления специализированного механизма для подвесок. В результате галопирование (разладка в угле наклона) во время периода торможения эффективно ограничивается.
К тому же с помощью вышеупомянутой конструкции период времени для приведения распределения силы торможения между множеством передних колес и множеством задних колес ко второму распределению ограничивается периодом времени между временем начала внезапного отпускания тормозов и временем перехода углового ускорения угла наклона из отрицательного диапазона в положительный диапазон (то есть временем перехода от уменьшающегося состояния угловой скорости угла наклона к увеличивающемуся состоянию угловой скорости угла наклона). Здесь, как будет описываться далее, можно ускорить сходимость движения галопирования (см. фиг. 7А - 7С).
Краткое описание чертежей
Изобретение вместе с его дополнительными целями, признаками и преимуществами будет лучше всего понятно из нижеследующего описания, прилагаемой формулы изобретения и прилагаемых чертежей, на которых:
Фиг. 1 - схематичная структурная схема транспортного средства, в котором реализуется система управления движением транспортного средства, согласно варианту осуществления настоящего изобретения.
Фиг. 2 - схема для описания препятствующей галопированию геометрии, реализуемой в подвесках транспортного средства.
Фиг. 3 - схема, показывающая основное распределение, теоретическое распределение и второе распределение, используемое в качестве цели управления для распределения тормозного усилия с передней на заднюю ось.
Фиг. 4А - принципиальная схема, показывающая пример различных сил и препятствующего галопированию момента в случае, где распределение силы торможения с передней на заднюю ось приводится к постоянной настройке при основном распределении.
Фиг. 4В - принципиальная схема, показывающая различную силу и препятствующий галопированию момент в случае, где распределение силы торможения с передней на заднюю ось на фиг. 4А переходит от основного распределения к теоретическому распределению.
Фиг. 5А - схема, показывающая типовое изменение угла наклона для случая основного распределения, который реализуется на всем протяжении применения тормозов, и случая теоретического распределения, который реализуется в течение короткого периода после начала применения тормозов.
Фиг. 5В - схема, показывающая типовое изменение угловой скорости наклона в случае основного распределения и случае теоретического распределения, наподобие фиг. 5А.
Фиг. 5С - схема, показывающая типовое изменение углового ускорения наклона в случае основного распределения и случае теоретического распределения, как на фиг. 5А.
Фиг. 6А - принципиальная схема, показывающая пример различных сил и препятствующего галопированию момента в случае, где распределение силы торможения с передней на заднюю ось приводится к постоянной настройке при основном распределении.
Фиг. 6В - принципиальная схема, показывающая различную силу и препятствующий галопированию момент в случае, где распределение силы торможения с передней на заднюю ось на фиг. 6А переходит от основного распределения ко второму распределению.
Фиг. 7А - схема, показывающая типовое изменение угла наклона для случая основного распределения, который реализуется на всем протяжении применения тормозов, и случая второго распределения, который реализуется в течение короткого периода после начала отпускания тормозов.
Фиг. 7В - схема, показывающая типовое изменение угловой скорости наклона в случае основного распределения и случае второго распределения, наподобие фиг. 7А.
Фиг. 7С - схема, показывающая типовое изменение углового ускорения наклона в случае основного распределения и случае второго распределения, как на фиг. 7А.
Фиг. 8 - блок-схема алгоритма, показывающая процедуру для выполнения определения начала/завершения в первой операции управления ограничением галопирования, выполняемой ЦП, показанным на фиг. 1.
Фиг. 9 - блок-схема алгоритма, показывающая процедуру для выполнения определения начала/завершения во второй операции управления ограничением галопирования, выполняемой ЦП, показанным на фиг. 1.
Фиг. 10 - блок-схема алгоритма, показывающая процедуру для операции управления тормозами, выполняемой ЦП, показанным на фиг. 1.
Фиг. 11А - схема, показывающая типовое изменение силы торможения передних колес и типовое изменение силы торможения задних колес в случае начала внезапного применения тормозов.
Фиг. 11В - схема, показывающая типовое изменение замедления кузова транспортного средства в случае начала внезапного применения тормозов.
Фиг. 11С - схема, показывающая типовое изменение угла наклона в случае начала внезапного применения тормозов.
Фиг. 12А - схема, показывающая типовое изменение силы торможения передних колес и типовое изменение силы торможения задних колес в случае начала внезапного отпускания тормозов.
Фиг. 12В - схема, показывающая типовое изменение замедления кузова транспортного средства в случае начала внезапного отпускания тормозов.
Фиг. 12С - схема, показывающая типовое изменение угла наклона в случае начала внезапного отпускания тормозов.
Наилучшие варианты осуществления изобретения
Система управления движением транспортного средства, согласно варианту осуществления настоящего изобретения, будет описываться со ссылкой на прилагаемые чертежи. Фиг. 1 показывает схематическую структуру транспортного средства, в котором устанавливается система 10 управления движением транспортного средства из данного варианта осуществления.
В системе 10 управления движением транспортного средства предусматривается система электрического управления тормозами, а тормозная педаль BP (исполнительный орган тормозов) и контур давления тормозной жидкости разделяются. Система 10 управления движением транспортного средства включает в себя механизм 20 имитатора хода и гидравлическое устройство 30. Гидравлическое устройство 30 применяет гидравлическое давление тормозной жидкости для формирования силы торможения на соответствующих колесах FL, FR, RL, RR транспортного средства.
Механизм 20 имитатора хода включает в себя механизм применения известной силы реакции, который применяет к тормозной педали BP подходящую силу реакции (=силе Fp сжатия тормозной педали), которая соответствует ходу тормозной педали BP. Механизм применения силы реакции для упрощения не будет подробно описываться. С помощью механизма применения силы реакции водитель транспортного средства может получить соответствующее ощущение тормозной педали во время воздействия на тормозную педаль BP.
Гидравлическое устройство 30 обладает известной структурой, которая включает в себя множество электромагнитных клапанов, гидравлический насос и двигатель (не показан). Кроме того, гидравлическое устройство 30 может индивидуально регулировать гидравлическое давление (в дальнейшем называемое гидравлическим давлением Pwfl, Pwfr, Pwrl, Pwrr тормозного цилиндра) тормозных цилиндров Wfl, Wfr, Wrl, Wrr колес FL, FR, RL, RR транспортного средства.
Система 10 управления движением транспортного средства дополнительно включает в себя датчики 41fl, 41fr, 41rl, 41rr скорости вращения колеса типа электромагнитных датчиков, датчик 42 силы сжатия (датчик усилия на педали) и датчик 43 угла наклона. Каждый датчик 41fl, 41fr, 41rl, 41rr скорости вращения колеса выводит сигнал, который имеет соответствующую частоту, которая соответствует скорости колеса у соответствующего одного из колес FL, FR, RL, RR. Датчик 42 силы сжатия выводит сигнал, который указывает силу Fp сжатия тормозной педали (усилие на педали), приложенную от ноги водителя к тормозной педали BP. Датчик 43 угла наклона выводит сигнал, который указывает угол θp наклона кузова транспортного средства. Угол θp наклона принимает положительное значение во время наклона вперед кузова транспортного средства (то есть во время наклона вниз передней части кузова транспортного средства) и принимает отрицательное значение во время наклона назад кузова транспортного средства (то есть во время наклона вниз задней части кузова транспортного средства).
Система 10 управления движением транспортного средства дополнительно включает в себя электронный контроллер 50. Контроллер 50 является микрокомпьютером, который включает в себя ЦП 51, ROM 52, RAM 53, резервное RAM 54 и интерфейс 55, которые взаимосвязаны друг с другом посредством шины. Интерфейс 55 подключается к датчикам скорости вращения колеса 41fl, 41fr, 41rl, 41rr, датчику 42 силы сжатия и датчику 43 угла наклона для передачи сигналов от них к ЦП 51. Также интерфейс 55 выводит управляющие сигналы, например, на электромагнитные клапаны гидравлического устройства 30 и двигатель на основе команды ЦП 51.
Далее со ссылкой на фиг. 2 будет кратко описываться препятствующая галопированию геометрия в подвесках транспортного средства, в которую устанавливается система 10 управления движением транспортного средства из фиг. 1 (также называемая данной системой). На фиг. 2 для упрощения схематически изображены только передний верхний рычаг Fua и передний нижний рычаг Fla левой из двух подвесок FS передних колёс (подвесок переднего левого и переднего правого колеса) и задний верхний рычаг Rua и задний нижний рычаг Rla левой из двух подвесок RS задних колес (подвесок заднего левого и заднего правого колеса). Как показано на фиг. 2, мгновенный центр Cf движения каждого переднего колеса FL, FR относительно кузова транспортного средства, вызванного ходом подвески FS передних колес, располагается в точке, которая находится на верхней стороне точки Ef контакта с землей переднего колеса FL, FR и находится на задней стороне кузова транспортного средства точки Ef контакта с землей при обзоре с боковой стороны кузова транспортного средства. Расположение мгновенного центра Cf в боковой проекции кузова транспортного средства изменяется мгновенно в соответствии с величиной хода подвески FS передних колес.
Сейчас допускается, что линия, которая соединяет мгновенный центр Cf и точку Ef контакта с землей, является мнимой тягой переднего колеса. В таком случае горизонтальная составляющая Ff силы Flinkf осевого сжатия, которая прикладывается к мнимой тяге переднего колеса во время периода торможения, действует в качестве силы торможения переднего колеса. Вертикальная составляющая Fad силы Flinkf сжатия действует в качестве подъёмной силы, то есть препятствующей продольному наклону кузова силы, которая вызывается подвеской FS передних колес для подъема передней части кузова транспортного средства. Как обсуждалось выше, каждая подвеска FS передних колес имеет препятствующую продольному наклону кузова геометрию, которая реализует препятствующий продольному наклону кузова эффект во время периода торможения.
Мгновенный центр Cr движения каждого заднего колеса RL, RR относительно кузова транспортного средства, вызванного ходом соответствующей подвески RS задних колес, располагается в точке, которая находится на верхней стороне точки Er контакта с землей заднего колеса RL, RR и находится на передней стороне кузова транспортного средства точки Er контакта с землей при обзоре с боковой стороны кузова транспортного средства. Расположение мгновенного центра Cr в боковой проекции кузова транспортного средства также мгновенно изменяется в соответствии с величиной хода подвески RS задних колес.
Сейчас допускается, что линия, которая соединяет мгновенный центр Cr и точку Er контакта с землей, является мнимой тягой заднего колеса. В таком случае горизонтальная составляющая Fr силы Flinkr осевого растяжения, которая прикладывается к мнимой тяге заднего колеса во время периода торможения, действует в качестве силы торможения заднего колеса. Вертикальная составляющая Fal силы растяжения Flinkr действует в качестве склоняющей вниз силы, то есть препятствующей продольному подъему кузова силы, которая вызывается подвеской RS задних колес для склонения вниз задней части кузова транспортного средства. Как обсуждалось выше, каждая подвеска RS задних колес имеет препятствующую продольному подъему кузова геометрию, которая реализует препятствующий продольному подъему кузова эффект во время периода торможения.
Как описано выше, во время периода торможения препятствующий галопированию эффект достигается с помощью препятствующего продольному наклону кузова эффекта, который реализуется препятствующей продольному наклону кузова геометрией каждой подвески FS передних колес, и препятствующего продольному подъему кузова эффекта, который реализуется препятствующей продольному подъёму кузова геометрией каждой подвески RS задних колес. В силу этого вокруг центра G тяжести транспортного средства образуется препятствующий галопированию момент Mp. В результате галопирование ограничивается во время периода торможения.
Теперь угол, который задается между мнимой тягой переднего колеса и горизонтальной линией в боковой проекции кузова транспортного средства, обозначается как θf. Кроме того, угол, который задается между мнимой тягой заднего колеса и горизонтальной линией в боковой проекции кузова транспортного средства, обозначается как θr. Здесь вышеупомянутая препятствующая продольному наклону кузова сила Fad и вышеупомянутая препятствующая продольному подъему кузова сила Fal выражаются нижеследующими Уравнениями 1 и 2 соответственно. Когда сила Ff торможения переднего колеса у соответствующих передних колес FL, FR и сила Fr торможения заднего колеса у соответствующих задних колес RL, RR становятся больше, то препятствующая продольному наклону кузова сила Fad и препятствующая продольному подъему кузова сила Fal становятся больше, и наоборот.
Fad=Ff·tan θf..... Уравнение (1)
Fal=Fr·tan θr..... Уравнение (2)
Кроме того, когда угол θf и угол θr становятся больше, препятствующая продольному наклону кузова сила Fad и препятствующая продольному подъему кузова сила Fal становятся больше, и наоборот. В силу этого возможно получить препятствующую галопированию геометрию, которая обладает препятствующим галопированию эффектом. Здесь, как обсуждалось выше, когда адаптируется препятствующая галопированию геометрия, которая демонстрирует чрезмерно большой препятствующий галопированию эффект, ощущение от поездки у пассажира(ов) неблагоприятно ухудшается во время не относящегося к торможению периода, например, во время движения по плохой дороге. Таким образом, в данном транспортном средстве препятствующая галопированию геометрия, которая проявляет умеренный или относительно небольшой препятствующий галопированию эффект, реализуется путем установки относительно малого угла θf и относительно малого угла θr.
К тому же в данном транспортном средстве каждая подвеска FS передних колес и каждая подвеска RS задних колес (точнее говоря, расположения мгновенных центров Cf, Cr) устанавливаются для достижения отношения θf < θr. Поэтому уклон изменения (=tan θr) препятствующей продольному подъему кузова силы Fal (степень препятствующего продольному подъему кузова эффекта) относительно изменения силы Fr торможения соответствующих задних колес RL, RR больше уклона изменения (=tan θf) препятствующей продольному наклону кузова силы Fad (степень препятствующий продольному наклону кузова эффекта) относительно силы Ff торможения соответствующих передних колес FL, FR. Другими словами, когда величина изменения силы Ff торможения соответствующих передних колес FL, FR является той же, что и величина изменения силы Fr торможения соответствующих задних колес RL, RR, величина изменения препятствующей продольному подъему кузова силы Fal становится больше величины изменения препятствующей продольному наклону кузова силы Fad.
Сейчас будет описываться сущность операции управления ограничением галопирования после начала применения тормозов.
В данной системе во время периода торможения (рабочего периода тормозной педали BP) распределение силы торможения (в дальнейшем также называемое "распределение силы торможения с передней на заднюю ось") между передними колесами FL, FR и задними колесами RL, RR обычно приводится к основному распределению, которое соответствует кривой основного распределения, показанной на фиг. 3. В этом основном распределении сила торможения соответствующих задних колес RL, RR устанавливается на относительно небольшом уровне, который может ограничить возникновение блокировки задних колес перед блокировкой передних колес FL, FR.
В частности, определяется целевое замедление Gt на основе силы Fp сжатия тормозной педали, которая получается с помощью датчика 42 силы сжатия. Затем определяется точка пересечения, где линия равного ускорения (линия iso-G), которая соответствует этому целевому замедлению Gt, пересекается с кривой основного распределения. После этого гидравлическое устройство 30 управляет гидравлическим давлением тормозного цилиндра соответствующих передних колес FL, FR и давлением тормозного цилиндра соответствующих задних колес RL, RR, так что сила торможения соответствующих передних колес FL, FR и сила торможения соответствующих задних колес RL, RR становятся соответствующими значениями, которые указываются в этой точке пересечения. Здесь гидравлическое давление тормозного цилиндра переднего левого колеса FL и гидравлическое давление тормозного цилиндра переднего правого колеса FR устанавливаются в одинаковое давление. Также гидравлическое давление тормозного цилиндра заднего левого колеса RL и гидравлическое давление тормозного цилиндра заднего правого колеса RR устанавливаются в одинаковое давление.
Фиг. 4А показывает пример, где распределение силы торможения с передней на заднюю ось приводится к постоянной настройке при основном распределении. В этом примере сила Ff торможения соответствующих передних колес FL, FR задается как Ff=Ff1, а сила Fr торможения соответствующих задних колес RL, RR задается как Fr=Fr1. Также препятствующая продольному наклону кузова сила Fad задается как Fad= Fad1, а препятствующая продольному подъему кузова сила Fal задается как Fal= Fal1. Кроме того, препятствующий галопированию момент MP задается как Mp=Mp1.
Фиг. 5А - 5С показывают пример, где распределение силы торможения с передней на заднюю ось приводится к постоянной настройке при основном распределении, описанном выше во время периода применения тормозов, и внезапное действие (внезапное ослабление) тормозной педали BP выполняется в момент t1 времени. В частности, пунктирная линия на фиг. 5А демонстрирует типовое изменение угла θp наклона со временем. Пунктирная линия на фиг. 5В демонстрирует типовое изменение со временем угловой скорости dθp наклона, которая является дифференциальным значением угла θp наклона по времени. Пунктирная линия на фиг. 5С демонстрирует типовое изменение со временем углового ускорения ddθp наклона, которое является дифференциальным значением угловой скорости dθp наклона по времени. Здесь допускается, что сила Fp сжатия тормозной педали изменяется ступенчато от нуля до значения Fp1 в момент t1 времени вследствие внезапного действия тормозной педали BP. Кроме того, допускается нижеследующая ситуация. То есть в случае, где распределение силы торможения с передней на заднюю ось приводится к основному распределению, когда сила Fp сжатия тормозной педали сохраняется постоянной в значении Fp1, угол θp наклона в конечном счёте стремится к значению θp1.
После момента t1 времени сила инерции действует на центр G тяжести транспортного средства в направлении передней части транспортного средства (направление к передней стороне кузова транспортного средства) вследствие применения тормозов, так что каждая подвеска FS передних колес делает свой ход к стороне сжатия, где подвеска FS передних колес сжимается, и каждая подвеска RS задних колес делается свой ход к стороне растяжения, где подвеска RS задних колес растягивается или вытягивается. Поэтому кузов транспортного средства наклоняется вперед (то есть передняя сторона кузова транспортного средства наклоняется вниз), и угол θp наклона увеличивается, как показано на фиг. 5А. Во время этого процесса, как показано на фиг. 5С, угловое ускорение ddθp наклона демонстрирует положительное максимальное значение (пиковое значение) точно после момента t1 времени и затем переходит из положительного диапазона (диапазон "+") в отрицательный диапазон (диапазон "-") в момент t2 времени, который наступает быстро после момента t1 времени.
В этом случае угол θp наклона демонстрирует относительно большое превышение. Таким образом, сходимость угла θp наклона к значению θp1 замедляется. Это происходит по следующим причинам. То есть, как описано выше, данное транспортное средство обладает препятствующей галопированию геометрией, которая демонстрирует умеренный или относительно небольшой препятствующий галопированию эффект. В результате достаточный препятствующий галопированию момент Mp не может быть сформирован. Поэтому пиковое значение углового ускорения ddθp наклона точно после момента t1 времени становится большим положительным значением. Таким образом, угловая скорость dθp наклона (и в связи с этим увеличивающийся уклон угла θp наклона) точно после момента t1 времени также становится большой, так что угол θp наклона имеет относительно большое превышение после этого.
Чтобы ограничить возникновение превышения угла θp наклона, эффективным является ограничение пикового значения углового ускорения ddθp наклона относительно небольшим положительным значением точно после начала применения тормозов. Чтобы ограничить пиковое значение углового ускорения ddθp наклона до относительно небольшого значения, требуется сделать препятствующий галопированию момент Mp большим значением точно после начала применения тормозов.
Поэтому в данной системе, когда начинается внезапное применение тормозов, распределение силы торможения с передней на заднюю ось приводится к первому распределению, при котором сила торможения, приложенная к соответствующим задним колесам RL, RR, больше таковой у основного распределения, вместо основного распределения по всему периоду времени между временем начала торможения и временем перехода углового ускорения ddθp наклона из положительного диапазона в отрицательный диапазон (то есть, периоду времени между моментом t1 и моментом t2 времени). Операция управления, которая дает в результате приведение распределения силы торможения с передней на заднюю ось к первому распределению, также будет называться "первой операцией управления ограничением галопирования". Теоретическое распределение (распределение, которое соответствует кривой теоретического распределения, показанной на фиг. 3), которое является распределением силы торможения с передней на заднюю ось, которое соответствует случаю, где передние колеса FL, FR и задние колеса RL, RR блокируются одновременно, используется в качестве первого распределения.
Фиг. 4В демонстрирует изменения силы Ff торможения переднего колеса, силы Fr торможения заднего колеса, препятствующей продольному наклону кузова силы Fad, препятствующей продольному подъему кузова силы Fal и препятствующего галопированию момента Mp, обнаруживаемые во время перехода распределения силы торможения с передней на заднюю ось из основного распределения в теоретическое распределение в примере фиг. 4А. На фиг. 4В пустые стрелки используются для указания состояния в основном распределении (случай, который аналогичен случаю фиг. 4А), и сплошные стрелки используются для указания состояния в теоретическом распределении.
В случае теоретического распределения часть силы Ff торможения переднего колеса передается силе Fr торможения заднего колеса, по сравнению со случаем основного распределения. В показанном на фиг. 4В примере сила Ff торможения переднего колеса уменьшается на величину ΔF1 со значения Ff1 до значения Ff2, и сила Fr торможения заднего колеса увеличивается на величину ΔF1 со значения Fr1 до значения Fr2. То есть сумма силы Ff торможения переднего колеса и силы Fr торможения заднего колеса сохраняется в том же значении, что и в случае основного распределения. Кроме того, вследствие уменьшения силы Ff торможения переднего колеса на величину ΔF1 препятствующая продольному наклону кузова сила Fad уменьшается со значения Fad1 до значения Fad2. Также вследствие увеличения силы Fr торможения заднего колеса на величину ΔF1 препятствующая продольному подъему кузова сила Fal увеличивается со значения Fal1 до значения Fal2.
Здесь, как обсуждалось выше, из-за наличия отношения θf < θr величина изменения в препятствующей продольному подъему кузова силе Fal становится больше величины изменения в препятствующей продольному наклону кузова силе Fad, когда величина изменения в силе торможения переднего колеса является той же, что и величина изменения в силе торможения заднего колеса. В частности, в примере фиг. 4В величина ΔFal1 (=Fal2-Fal1) увеличения в препятствующей продольному подъему кузова силе Fal больше величины ΔFad1 (=Fad1-Fad2) уменьшения в препятствующей продольному наклону кузова силе Fad. Поэтому, когда говорится обо всем транспортном средстве, в теоретическом распределении препятствующий галопированию эффект становится большим, и препятствующий галопированию момент Mp увеличивается со значения Mp1 до значения Mp1 по сравнению со случаем основного распределения. В силу этого становится трудно увеличить угол θp наклона.
Показанная на фиг. 5А сплошная линия указывает типовое изменение угла θp наклона в случае, где выполняется первая операция управления ограничением галопирования в течение периода времени между временем начала применения тормозов и временем перехода углового ускорения ddθp наклона из положительного диапазона в отрицательный диапазон (то есть периода времени между моментом t1 и моментом t2 времени). Показанная на фиг. 5А сплошная линия указывает типовое изменение угловой скорости dθp наклона в случае, где выполняется первая операция управления ограничением галопирования, в течение периода времени между моментом t1 и моментом t2 времени. Показанная на фиг. 5С сплошная линия указывает типовое изменение углового ускорения ddθp наклона в случае, где выполняется первая операция управления ограничением галопирования, в течение периода времени между моментом t1 и моментом t2 времени.
В этом случае относительно большой препятствующий галопированию момент Mp может по возможности формироваться точно после момента t1 времени, чтобы пиковое значение углового ускорения ddθp наклона стало небольшим положительным значением точно после момента t1 времени, как показано на фиг. 5С. Таким образом, угловая скорость dθp наклона точно после момента t1 времени (и в силу этого увеличивающийся уклон угла θp наклона) становится небольшой. В силу этого угол θp наклона не показывает превышение после этого, и угол θp наклона сходится к значению θp1 на раннем этапе.
В данной системе завершение первой операции управления ограничением галопирования устанавливается на время перехода углового ускорения ddθp наклона из положительного диапазона в отрицательный диапазон (то есть момент t2 времени). На основе различных экспериментов и моделирований подтверждается, что это может эффективно ускорить сходимость угла θp наклона.
Это может быть по следующим причинам. Сначала к моменту t2 времени, в котором угловое ускорение ddθp наклона переходит из положительного диапазона в отрицательный диапазон, угол θp наклона стал относительно большим значением. Таким образом, величина хода каждой подвески FS передних колес и величина хода каждой подвески RS задних колес также стали относительно большими значениями. Таким образом, сила опорной пружины кузова транспортного средства в каждой подвеске RS задних колес, которая функционирует в направлении увеличения угла наклона, значительно снижается, а сила опорной пружины кузова транспортного средства в каждой подвеске FS передних колес, которая функционирует в направлении уменьшения угла наклона, значительно увеличивается. Таким образом реализуется препятствующий галопированию эффект. В результате нет реальной необходимости в выполнении первой операции управления ограничением галопирования для увеличения препятствующего галопированию момента Mp после момента t2 времени. Кроме того, когда первая операция управления ограничением галопирования продолжается после момента t2 времени, сходимость угла θp наклона может быть замедлена.
Кроме того, в случае, где сила Fp сжатия тормозной педали сохраняется постоянной в значении Fp1, когда распределение силы торможения с передней на заднюю ось приводится к теоретическому распределению вместо основного распределения, угол θp наклона сходится к значению θp2 вместо значения θp1 (здесь θp2<θp1). Когда завершение первой операции управления ограничением галопирования устанавливается на неоправданно позднее время, угол θp наклона сходится к значению θp2, как указано линией точка-точка-тире на фиг. 5А. В таком случае, когда распределение силы торможения с передней на заднюю ось возвращается к основному распределению вследствие окончания первой операции управления ограничением галопирования, угол θp наклона может быть увеличен еще раз со значения θp2 до значения θp1. Таким образом, угол θp наклона возможно может показывать излишнюю разладку.
Как описано выше, в данной системе, когда есть высокая вероятность возникновения большой разладки (превышения) угла θp наклона при начале внезапного применения тормозов, выполняется первая операция управления ограничением галопирования для эффективного ограничения разладки угла θp наклона. Краткое содержание операции управления ограничением галопирования (первой операции управления ограничением галопирования) во время начала применения тормозов описано выше.
Сейчас будет описываться сущность операции управления ограничением галопирования после начала отпускания тормозов.
В данной системе, в дополнение к описанной выше первой операции управления ограничением галопирования, также выполняется другая операция управления ограничением галопирования во время начала отпускания тормозов на основе принципа, который аналогичен принципу первой операции управления ограничением галопирования. Фиг. 6А - 7С соответствуют фиг. 4А - 5С.
Фиг. 6А показывает пример, где распределение силы торможения с передней на заднюю ось приводится к постоянной настройке при основном распределении, как в примере фиг. 4А.
Фиг. 7А - 7С показывают пример, где распределение силы торможения с передней на заднюю ось приводится к постоянной настройке при основном распределении во время периода применения тормозов, и внезапное отпускание тормозов выполняется в момент t1 времени. В частности, пунктирная линия на фиг. 7А демонстрирует типовое изменение угла θp наклона со временем. Пунктирная линия на фиг. 7В демонстрирует типовое изменение со временем угловой скорости dθp наклона, которая является дифференциальным значением угла θp наклона по времени. Пунктирная линия на фиг. 7С демонстрирует типовое изменение со временем углового ускорения ddθp наклона, которое является дифференциальным значением угловой скорости dθp наклона по времени.
Как указано пунктирной линией на фиг. 7А, угол θp наклона уменьшается с некоторого значения после момента t1 времени вследствие отпускания тормозов. Во время этого процесса, как показано на фиг. 7С, угловое ускорение ddθp наклона демонстрирует отрицательное минимальное значение (пиковое значение) точно после момента t1 времени и затем переходит из отрицательного диапазона в положительный диапазон в момент t2 времени, который наступает быстро после момента t1 времени.
В этом случае угол θp наклона демонстрирует относительно большое превышение. Таким образом, сходимость угла θp наклона к нулю (0) замедляется. Это происходит по следующим причинам. То есть, точно после начала отпускания тормозов в момент t1 времени, сила Ff торможения соответствующих передних колес FL, FR и сила Fr торможения соответствующих задних колес RL, RR все еще существуют, так что препятствующий галопированию момент Mp, который основывается на препятствующей продольному наклону кузова силе Fad и препятствующей продольному подъему кузова силе Fal, все еще существует. Этот остающийся препятствующий галопированию момент Mp действует в направлении для стимулирования уменьшения углового ускорения ddθp наклона точно после момента t1 времени. Поэтому пиковое значение углового ускорения ddθp наклона становится большим отрицательным значением, абсолютное значение которого является большим. Таким образом, угловая скорость dθp наклона (отрицательное значение) точно после момента t1 времени становится небольшим значением, абсолютное значение которого большое, и уменьшающийся уклон угла θp наклона также становится небольшим значением, абсолютное значение которого большое. В результате угол θp наклона демонстрирует после этого относительно большое превышение.
Чтобы ограничить возникновение превышения угла θp наклона, эффективным является ограничение пикового значения углового ускорения ddθp наклона соответствующим отрицательным значением, абсолютное значение которого небольшое, точно после начала отпускания тормозов. Чтобы ограничить пиковое значение углового ускорения ddθp наклона отрицательным значением, имеющим небольшое абсолютное значение, требуется сделать препятствующий галопированию момент Mp меньшим значением точно после начала отпускания тормозов.
Поэтому в данной системе, когда начинается внезапное отпускание тормозов, распределение силы торможения с передней на заднюю ось приводится ко второму распределению (распределению, которое соответствует кривой второго распределения на фиг. 3), при котором сила торможения, приложенная к соответствующим задним колесам RL, RR, меньше таковой у основного распределения, вместо основного распределения по всему периоду времени между временем начала отпускания тормозов и временем перехода углового ускорения ddθp наклона из отрицательного диапазона в положительный диапазон (то есть, периоду времени между моментом t1 и моментом t2 времени). В дальнейшем операция управления, которая дает в результате приведение распределения силы торможения с передней на заднюю ось ко второму распределению, также будет называться "второй операцией управления ограничением галопирования".
Фиг. 6В демонстрирует изменения силы Ff торможения переднего колеса, силы Fr торможения заднего колеса, препятствующей продольному наклону кузова силы Fad, препятствующей продольному подъему кузова силы Fal и препятствующего галопированию момента Mp, обнаруживаемые во время перехода распределения силы торможения с передней на заднюю ось из основного распределения во второе распределение в примере фиг. 6А. На фиг. 6В пустые стрелки используются для указания состояния в основном распределении (случай, который аналогичен случаю фиг. 6А), и сплошные стрелки используются для указания состояния во втором распределении.
В случае второго распределения часть силы Fr торможения заднего колеса передается силе Ff торможения переднего колеса, по сравнению со случаем основного распределения. В показанном на фиг. 6В примере сила Fr торможения заднего колеса уменьшается на величину ΔF2 со значения Fr1 до значения Fr3, и сила Ff торможения переднего колеса увеличивается на величину ΔF2 со значения Ff1 до значения Ff3. То есть сумма силы Ff торможения переднего колеса и силы Fr торможения заднего колеса сохраняется в том же значении, что и в случае основного распределения. Кроме того, вследствие увеличения силы Ff торможения переднего колеса на величину ΔF2 препятствующая продольному наклону кузова сила Fad увеличивается со значения Fad1 до значения Fad3. Также вследствие уменьшения силы Fr торможения заднего колеса на величину ΔF2 препятствующая продольному подъему кузова сила Fal уменьшается со значения Fal1 до значения Fal3.
Здесь, как обсуждалось выше, вследствие выполнения отношения θf < θr, в примере фиг. 6В величина ΔFal2 (=Fal1-Fal3) уменьшения в препятствующей продольному подъему кузова силе Fal больше величины ΔFad2 (=Fad3-Fad1) увеличения в препятствующей продольному наклону кузова силе Fad. Поэтому, когда говорится обо всем транспортном средстве, во втором распределении препятствующий галопированию эффект становится небольшим, и препятствующий галопированию момент Mp уменьшается со значения Mp1 до значения Mp3 по сравнению со случаем основного распределения. В силу этого становится трудно уменьшить угол θp наклона.
Показанная на фиг. 7А сплошная линия указывает типовое изменение угла θp наклона в случае, где выполняется вторая операция управления ограничением галопирования от времени начала отпускания тормозов до времени перехода углового ускорения ddθp наклона из отрицательного диапазона в положительный диапазон (то есть период времени между моментом t1 и моментом t2 времени). Показанная на фиг. 7В сплошная линия указывает типовое изменение угловой скорости dθp наклона в случае, где выполняется вторая операция управления ограничением галопирования, в течение периода времени между моментом t1 и моментом t2 времени. Показанная на фиг. 7С сплошная линия указывает типовое изменение углового ускорения ddθp наклона в случае, где выполняется вторая операция управления ограничением галопирования, в течение периода времени между моментом t1 и моментом t2 времени.
В этом случае после момента t1 времени препятствующий галопированию момент Mp, который действует в направлении для стимулирования уменьшения углового ускорения ddθp наклона, становится небольшим значением. Таким образом, как указано сплошной линией на фиг. 7С, пиковое значение углового ускорения ddθp наклона точно после момента t1 времени становится отрицательным значением, абсолютное значение которого небольшое. Таким образом, угловая скорость dθp наклона (отрицательное значение) точно после момента t1 времени становится большим значением, абсолютное значение которого небольшое, и уменьшающийся уклон угла θp наклона также становится большим значением, абсолютное значение которого небольшое. В силу этого угол θp наклона не показывает превышение после этого, и угол θp наклона сходится к нулю на раннем этапе.
В данной системе завершение второй операции управления ограничением галопирования устанавливается на время перехода углового ускорения ddθp наклона из отрицательного диапазона в положительный диапазон (то есть момент t2 времени). На основе различных экспериментов и моделирований подтверждается, что это может эффективно ускорить сходимость угла θp наклона.
Это может быть по следующим причинам. В частности, к моменту t2 времени, в котором угловое ускорение ddθp наклона переходит из отрицательного диапазона в положительный диапазон, угол θp наклона стал относительно небольшим значением. Таким образом, величина хода каждой подвески FS передних колес и величина хода каждой подвески RS задних колес также стали относительно небольшими значениями. В связи с этим сила опорной пружины кузова транспортного средства в каждой подвеске RS задних колес, которая функционирует в направлении увеличения угла наклона, значительно увеличивается, а сила опорной пружины кузова транспортного средства в каждой подвеске FS передних колес, которая функционирует в направлении уменьшения угла наклона, значительно уменьшается. Таким образом препятствующий галопированию эффект реализуется не явно. В результате нет реальной необходимости в выполнении второй операции управления ограничением галопирования для уменьшения препятствующего галопированию момента Mp после момента t2 времени. Кроме того, когда вторая операция управления ограничением галопирования продолжается после момента t2 времени, сходимость угла θp наклона может быть замедлена.
Как описано выше, в данной системе, когда есть высокая вероятность возникновения большой разладки (превышения) угла θp наклона при начале внезапного отпускания тормозов, выполняется вторая операция управления ограничением галопирования для эффективного ограничения разладки угла θp наклона. Сущность операции управления ограничением эффекта галопирования во время начала отпускания тормозов описана выше.
Далее будет описываться реальная работы данной системы в связи с фиг. 8 - 10, которые показывают блок-схему алгоритма процедуры, выполняемой ЦП 51 в контроллере 50, и также в связи с фиг. 3.
ЦП 51 повторяет процедуру для определения начала/завершения первой операции управления ограничением галопирования, показанной на фиг. 8, в заранее установленные интервалы времени (например, каждые 6 мс). Таким образом, по заранее установленному расписанию ЦП 51 начинает процедуру на этапе 800 и переходит к этапу 805. На этапе 805 определяется, равно ли "0" (нулю) значение признака Z1. Здесь, когда значение признака Z1 равно "1", это указывает, что в настоящее время выполняется первая операция управления ограничением галопирования. В отличие от этого, когда значение признака Z1 равно "0", это указывает, что в настоящее время первая операция управления ограничением галопирования не выполняется.
В случае Z1=0 (в случае невыполнения в настоящее время первой операции управления ограничением галопирования) ЦП 51 переходит к этапу 810. На этапе 810 определяется, переходит ли сила Fp сжатия тормозной педали от нуля к другому значению, то есть определяется, началось ли торможение. Когда на этапе 810 возвращается ответ "ДА", ЦП 51 переходит к этапу 815. На этапе 815 определяется, больше ли заранее установленного значения А скорость увеличения dFp силы Fp сжатия тормозной педали. Другими словами, определяется, становится ли больше заранее установленной скорости скорость изменения степени приведения в действие тормозной педали BP для применения сил торможения переднего и заднего колес. В частности, на этапах 810, 815 определяется, началось ли внезапное применение тормозов.
Когда на каком-нибудь одном из этапов 810, 815 возвращается ответ "НЕТ", ЦП 51 немедленно переходит к этапу 895 и завершает текущую процедуру. В этом случае значение признака Z1 остается "0". В отличие от этого, когда на этапах 810, 815 возвращается ответ "ДА", ЦП 51 переходит к этапу 820 и изменяет значение признака Z1 с "0" на "1".
С другой стороны, в случае, где признак Z1=1 (то есть в случае выполняемой в настоящее время первой операции управления ограничением галопирования), на этапе 805 возвращается ответ "НЕТ", и в силу этого ЦП 51 переходит к этапу 825. На этапе 825 определяется, переходит ли угловое ускорение ddθp наклона из положительного диапазона в отрицательный диапазон. Когда на этапе 825 возвращается ответ "НЕТ", ЦП переходит к этапу 895 и завершает текущую процедуру. В этом случае значение признака Z1 остается "1". Угловое ускорение ddθp наклона получается путем получения угла θp наклона от датчика 43 угла наклона и затем двукратного дифференцирования (взятия второй производной) по времени полученного угла θp наклона. В отличие от этого, когда на этапе 825 возвращается ответ "ДА", ЦП 51 переходит к этапу 830 и изменяет значение признака Z1 с "1" на "0".
Как описано выше, в результате повторения процедуры из фиг. 8, когда начинается внезапное применение тормозов в случае признака Z1=0, значение признака Z1 изменяется с "0" на "1". Кроме того, когда угловое ускорение ddθp наклона переходит из положительного диапазона в отрицательный диапазон в случае признака Z1=1, значение признака Z1 изменяется с "1" на "0".
ЦП 51 повторяет процедуру для определения начала/завершения второй операции управления ограничением галопирования, показанной на фиг. 9, в заранее установленные интервалы времени (например, каждые 6 мс). Процедура из фиг. 9 аналогична процедуре из фиг. 8. Поэтому для упрощения подробности процедуры из фиг. 9 не будут описываться. Здесь, когда значение признака Z2 равно "1", это указывает, что в настоящее время выполняется вторая операция управления ограничением галопирования. В отличие от этого, когда значение признака Z2 равно "0", это указывает, что в настоящее время вторая операция управления ограничением галопирования не выполняется.
Когда внезапное отпускание тормозов начинается в состоянии признака Z2=0 путем повторения показанной на фиг. 9 процедуры, то есть, когда скорость увеличения dFp силы Fp сжатия тормозной педали становится отрицательной и меньше заранее установленного значения (-В) во время применения тормозов (Fp>0), значение признака Z2 изменяется с "0" на "1". Другими словами, когда скорость изменения степени приведения в действие тормозной педали BP для ослабления сил торможения переднего и заднего колес становится заранее больше установленной скорости, значение признака Z2 изменяется с "0" на "1". В отличие от этого, когда угловое ускорение ddθp наклона переходит из отрицательного диапазона в положительный диапазон в состоянии признака Z2=1, значение признака Z2 изменяется с "1" на "0".
ЦП 51 повторяет процедуру операции управления тормозами, показанную на фиг. 10, в заранее установленные интервалы времени (например, каждые 6 мс). Таким образом, по заранее установленному расписанию ЦП 51 начинает этап 1000 операции и затем переходит к этапу 1005. На этапе 1005 определяется, выполняется ли условие признак Z1 = признак Z2 = 0, то есть установлены ли в "0" все признаки Z1, Z2.
Теперь, если это точно после начала внезапного применения тормозов (см. точку "а" на фиг. 3), то признаки Z1, Z2 должны быть в состоянии Z1=1 (см. этап 820) и Z2=0. В этом случае, на этапе 1005 возвращается ответ "НЕТ", и ЦП 51 переходит к этапу 1010, где определяется, равен ли 1 признак Z1 (то есть Z1=1). Затем, когда на этапе 1010 возвращается ответ "ДА", ЦП 51 переходит к этапу 1015.
На этапе 1015 ЦП 51 выполняет операцию управления теоретическим распределением. Таким образом, там определяется точка пересечения, где линия равного ускорения (линия iso-G), которая соответствует целевому замедлению Gt, полученному на основе силы Fp сжатия тормозной педали, принятой от датчика 42 силы сжатия, пересекается с кривой теоретического распределения. Затем гидравлическое устройство 30 управляет гидравлическим давлением тормозного цилиндра соответствующих передних колес FL, FR и гидравлическим давлением тормозного цилиндра соответствующих задних колес RL, RR, так что сила Ff торможения соответствующих передних колес FL, FR и сила Fr торможения соответствующих задних колес RL, RR становятся соответствующими значениями, которые указываются в этой точке пересечения. Поэтому распределение силы торможения с передней на заднюю ось приводится к теоретическому распределению. Этот этап 1015 соответствует средству реализации первого распределения из настоящего изобретения.
Вышеупомянутый процесс многократно выполняется, пока признак Z1 не установлен в "0" (то есть признак Z1=0). Таким образом, распределение силы торможения с передней на заднюю ось сохраняется приведенным к теоретическому распределению (то есть поддержание первой операции управления ограничением галопирования, см. переход от точки "а" к точке "b" на фиг. 3), пока угловое ускорение ddθp наклона не перейдет из положительного диапазона в отрицательный диапазон.
Когда угловое ускорение ddθp наклона переходит из положительного диапазона в отрицательный диапазон (см. точку "b" на фиг. 3), признак Z1 возвращается из "1" в "0" (см. этап 830). В результате условие Z1=Z2=0 удовлетворяется, и в силу этого на этапе 1005 возвращается ответ "ДА". В силу этого ЦП 51 переходит к этапу 1020, где определяется, находится ли он все еще в рамках заранее установленного периода времени со времени изменения значения признака Z1 с "1" на "0".
Здесь текущий момент времени в этом состоянии находится точно после перехода углового ускорения ddθp наклона из положительного диапазона в отрицательный диапазон, так что он все еще находится в вышеупомянутом заранее установленном периоде времени. Поэтому на этапе 1020 возвращается ответ "ДА", и ЦП 51 переходит к этапу 1025, где выполняется первая операция управления переходом. Первая операция управления переходом является операцией управления для постепенного возврата распределения силы торможения с передней на заднюю ось от теоретического распределения к основному распределению.
Данный тип процесса выполняется многократно до окончания заранее установленного периода времени. Поэтому первая операция управления переходом поддерживается до окончания заранее установленного периода времени, чтобы распределение силы торможения с передней на заднюю ось постепенно переходило от теоретического распределения к основному распределению (см. переход от точки "b" к точке "c" на фиг. 3).
Когда заранее установленный период времени истекает (см. точку "с" на фиг. 3), на этапе 1020 возвращается ответ "НЕТ", и в силу этого ЦП 51 переходит к этапу 1030. На этапе 1030 определяется, находится ли он все еще в рамках заранее установленного периода времени со времени изменения значения признака Z2 с "1" на "0".
В текущем моменте времени на этапе 1030 возвращается ответ "НЕТ", и в силу этого ЦП 51 переходит к этапу 1035, где выполняется операция управления основным распределением. Поэтому распределение силы торможения с передней на заднюю ось приводится к основному распределению. Этот этап 1035 соответствует средству реализации основного распределения из настоящего изобретения.
Вышеупомянутый процесс выполняется многократно, пока условие Z1=Z2=0 уже не удовлетворяется (то есть до начала внезапного отпускания тормозов). Поэтому распределение силы торможения с передней на заднюю ось сохраняется приведенным к основному распределению до начала внезапного отпускания тормозов (см. переход от точки "с" к точке "d" на фиг. 3).
В этом состояние, если это точно после начала внезапного отпускания тормозов (см. точку "d" на фиг. 3), то признак Z1 должен быть 0 (то есть Z1=0), и признак Z2 должен быть 1 (то есть Z2=1) (см. этап 920). В этом случае на этапе 1005 возвращается ответ "НЕТ", чтобы ЦП 51 переходил к этапу 1010, и на этапе 1010 возвращается ответ "НЕТ". Таким образом, ЦП 51 переходит к этапу 1040.
На этапе 1040 ЦП 51 выполняет операцию управления вторым распределением. Таким образом, распределение силы торможения с передней на заднюю ось приводится ко второму распределению (см. точку "е" на фиг. 3). Этот этап 1040 соответствует средству реализации второго распределения из настоящего изобретения.
Вышеупомянутый процесс многократно выполняется, пока признак Z2 не установлен в "0" (то есть признак Z2=0). Таким образом, распределение силы торможения с передней на заднюю ось сохраняется приведенным ко второму распределению (то есть поддержание второй операции управления ограничением галопирования, см. переход от точки "e" к точке "f" на фиг. 3), пока угловое ускорение ddθp наклона не перейдет из отрицательного диапазона в положительный диапазон.
Когда угловое ускорение ddθp наклона переходит из отрицательного диапазона в положительный диапазон (см. точку "f" на фиг. 3), признак Z2 возвращается из "1" в "0" (см. этап 930). Таким образом, условие Z1=Z2=0 удовлетворяется. В силу этого на этапе 1005 еще раз возвращается ответ "ДА", чтобы ЦП 51 переходил к этапу 1020, и на этапе 1020 возвращается ответ "НЕТ". В результате, ЦП 51 переходит к этапу 1030.
Здесь текущий момент времени в этом состоянии находится точно после перехода углового ускорения ddθp наклона из отрицательного диапазона в положительный диапазон, так что он все еще находится в вышеупомянутом заранее установленном периоде времени. Поэтому на этапе 1030 возвращается ответ "ДА", и ЦП 51 переходит к этапу 1045, где выполняется вторая операция управления переходом. Вторая операция управления переходом является операцией управления для постепенного возврата распределения силы торможения с передней на заднюю ось от второго распределения к основному распределению.
Данный тип процесса выполняется многократно до окончания заранее установленного периода времени. Поэтому вторая операция управления переходом поддерживается до окончания заранее установленного периода времени, чтобы распределение силы торможения с передней на заднюю ось постепенно переходило от второго распределения к основному распределению (см. переход от точки "f" к точке "g" на фиг. 3).
Когда заранее установленный период времени истекает (см. точку "g" на фиг. 3), на этапе 1030 возвращается ответ "НЕТ", и в силу этого ЦП 51 переходит к этапу 1035. На этапе 1035 ЦП 51 выполняет операцию управления основным распределением. Поэтому распределение силы торможения с передней на заднюю ось возвращается к основному распределению (см. переход от точки "g" к точке "а" на фиг. 3)
Фиг. 11А - 11С показывают пример, где внезапное применение тормозов начинается в момент t11 времени. Точнее говоря, фиг. 11А показывает типовое изменение со временем силы торможения соответствующих передних колес и силы торможения соответствующих задних колес. Фиг. 11В показывает типовое изменение замедления кузова транспортного средства со временем. Фиг. 11С показывает типовое изменение угла наклона со временем. Пунктирная линия на каждой из фиг. 11А - 11С показывает случай, где операция управления основным распределением выполняется все время в течение периода применения тормозов. Сплошная линия на каждой из фиг. 11А - 11С показывает случай, где операция управления тормозами (особенно первая операция управления ограничением галопирования, первая операция управления переходом и операция управления основным распределением) в данной системе выполняется согласно блок-схемам алгоритмов, показанным на фиг. с 8 по 10. На фиг. 11А - 11С во время периода между моментом t11 времени и моментом t12 времени выполняется первая операция управления ограничением галопирования, а затем последовательно выполняются первая операция управления переходом и операция управления основным распределением.
Как совершенно очевидно из фиг. 11А - 11С, когда выполняется первая операция управления ограничением галопирования, скорость увеличения угла наклона снижается, так что превышение угла наклона может быть существенно ограничено (см. сплошную линию). Кроме того, сумма силы торможения переднего колеса и силы торможения заднего колеса во время первой операции управления ограничением галопирования (то есть операции управления теоретическим распределением) поддерживается в том же значении, что и значение у операции управления основным распределением. Таким образом, даже когда выполняется первая операция управления ограничением галопирования, замедление кузова транспортного средства изменяется таким же образом, что и в операции управления основным распределением. Поэтому у водителя не будет никакого значительного некомфортного ощущения замедления.
Фиг. 12А - 12С показывают пример, где внезапное отпускание тормозов начинается в момент t21 времени. Точнее говоря, фиг. 12А показывает типовое изменение со временем силы торможения соответствующих передних колес и силы торможения соответствующих задних колес. Фиг. 12В показывает типовое изменение замедления кузова транспортного средства со временем. Фиг. 12С показывает типовое изменение угла наклона со временем. Пунктирная линия на каждой из фиг. 12А - 12С показывает случай, где операция управления основным распределением выполняется все время в течение периода применения тормозов. Сплошная линия на каждой из фиг. 12А - 12С показывает случай, где операция управления тормозами (особенно вторая операция управления ограничением галопирования, вторая операция управления переходом и операция управления основным распределением) в данной системе выполняется согласно блок-схемам алгоритмов, показанным на фиг. с 8 по 10. На фиг. 12А - 12С операция управления основным распределением выполняется до момента t21 времени. После этого, во время периода между моментом t21 времени и моментом t22 времени выполнятся вторая операция управления ограничением галопирования, а затем последовательно выполняются вторая операция управления переходом и операция управления основным распределением.
Как совершенно очевидно из фиг. 12А - 12С, когда с помощью данной системы выполняется вторая операция управления ограничением галопирования, скорость уменьшения угла наклона снижается, так что превышение угла наклона может быть существенно ограничено (см. сплошную линию). Кроме того, сумма силы торможения переднего колеса и силы торможения заднего колеса во время второй операции управления ограничением галопирования (то есть операции управления вторым распределением) поддерживается в том же значении, что и значение у операции управления основным распределением. Таким образом, даже когда выполняется вторая операция управления ограничением галопирования, замедление кузова транспортного средства изменяется таким же образом, что и в операции управления основным распределением. Поэтому у водителя не будет никакого значительного некомфортного ощущения замедления.
Как описано выше, система управления движением транспортного средства из данного варианта осуществления применяется к транспортному средству, которое имеет подвески FS передних колёс, имеющие препятствующую продольному наклону кузова геометрию, и подвески RS задних колес, имеющие препятствующую продольному наклону кузова геометрию. Подвески FS передних колёс и подвески RS задних колес проектируются таким образом, чтобы препятствующий продольному подъему кузова эффект в препятствующей продольному подъёму кузова геометрии был больше, чем препятствующий продольному наклону кузова эффект в препятствующей продольному наклону кузова геометрии. Обычно распределение силы торможения с передней на заднюю ось приводится к основному распределению во время размещения тормозов. В отличие от этого, когда начинается внезапное применение тормозов, распределение силы торможения с передней на заднюю ось приводится к первому распределению (= теоретическому распределению), при котором сила торможения, приложенная к соответствующим задним колесам RL, RR, больше таковой у основного распределения, вместо основного распределения во время заранее установленного короткого периода с момента начала применения тормозов. Таким образом, величина увеличения препятствующего продольному подъему кузова эффекта становится больше, чем величина уменьшения препятствующего продольному наклону кузова эффекта, так что препятствующий галопированию момент у всего транспортного средства увеличивается.
В результате, когда угол наклона демонстрирует большую разладку после начала внезапного применения тормозов, увеличение угла наклона ограничивается путем увеличения препятствующего галопированию эффекта без предоставления специализированного механизма в подвесках. Таким образом подвески, которые имеют препятствующие галопированию геометрии, которые не обладают большим препятствующим галопированию эффектом, адаптируются, чтобы сохранялось хорошее ощущение от поездки во время не относящегося к торможению периода (нерабочий период тормозной педали BP), и галопирование (разладка угла галопирования) преимущественно ограничивалась во время периода торможения.
Кроме того, в этом случае теоретическое распределение используется в качестве первого распределения. Таким образом, величина увеличения препятствующего галопированию эффекта может быть максимизирована путем перехода от основного распределения к первому распределению в рамках диапазона, в котором существует высокая вероятность возникновения блокировки задних колес перед блокировкой передних колес вследствие перехода от основного распределения к первому распределению.
К тому же, когда начинается внезапное отпускание тормозов во время применения тормозов, распределение силы торможения с передней на заднюю ось приводится ко второму распределению, при котором сила торможения, приложенная к соответствующим задним колесам RL, RR, меньше таковой у основного распределения, вместо основного распределения только во время заранее установленного короткого периода с момента начала отпускания тормозов. Таким образом, величина уменьшения препятствующего продольному подъему кузова эффекта становится больше, чем величина увеличения препятствующего продольному наклону кузова эффекта, так что препятствующий галопированию момент у всего транспортного средства уменьшается.
В результате, когда угол наклона демонстрирует большую разладку после начала внезапного отпускания тормозов, уменьшение угла наклона ограничивается путем уменьшения препятствующего галопированию эффекта без предоставления специализированного механизма в подвесках. Поэтому галопирование (разладка угла наклона) может эффективно ограничиваться во время отпускания тормозов.
Настоящее изобретение не ограничивается вышеприведенным вариантом осуществления, и вышеприведенный вариант осуществления может изменяться различными способами в рамках объема настоящего изобретения. Например, в вышеприведенном варианте осуществления, "время возникновения перехода углового ускорения ddθp наклона из положительного диапазона в отрицательный диапазон", которое является завершением первой операции управления ограничением галопирования (то есть операции управления теоретическим распределением), и "время возникновения перехода углового ускорения ddθp наклона из отрицательного диапазона в положительный диапазон", которое является завершением второй операции управления ограничением галопирования (то есть операции управления вторым распределением), определяются на основе углового ускорения ddθp наклона, которое получается двукратным дифференцированием по времени угла θp наклона, полученного от датчика 43 угла наклона (см. этапы 825, 925). В качестве альтернативы вместо датчика 43 угла наклона может использоваться датчик угловой скорости наклона, и угловое ускорение наклона, которое получается лишь однократным дифференцированием по времени угловой скорости наклона, полученной с помощью датчика угловой скорости наклона, может использоваться для определения завершения первой операции управления ограничением галопирования и завершения второй операции управления ограничением галопирования. Кроме того, с этой целю можно использовать угловое ускорение наклона, которое получается на основе измерений датчиков высоты кузова транспортного средства, которые устанавливаются на передней стороне кузова транспортного средства и задней стороне кузова транспортного средства.
Также период времени между временем начала внезапного применения тормозов и "временем возникновения перехода углового ускорения ddθp наклона из положительного диапазона в отрицательный диапазон", а также период времени между временем начала внезапного отпускания тормозов и "временем возникновения перехода углового ускорения ddθp наклона из отрицательного диапазона в положительный диапазон" могут быть оценены заранее в соответствии с собственной частотой в направлении галопирования кузова транспортного средства, которая получается на основе технических условий на проектирование кузова транспортного средства. Таким образом, каждая длительность периода первой операции управления ограничением галопирования и длительность периода второй операция управления ограничением галопирования может быть задана соответствующим заранее установленным периодом времени, который определяется на основе вышеупомянутой собственной частоты.
Кроме того, в вышеприведенном варианте осуществления теоретическое распределение используется в качестве первого распределения. В качестве альтернативы вместо теоретического распределения в качестве первого распределения может использоваться другое распределение, при котором сила торможения соответствующих задних колес меньше таковой у теоретического распределения (и также при котором сила торможения соответствующих задних колес больше таковой у основного распределения).
Кроме того, в вышеприведенном варианте осуществления в качестве второго распределения также возможно использовать другое распределение, при котором сила торможения соответствующих задних колес меньше таковой у основного распределения, и также при котором сила торможения соответствующих задних колес становится меньше, так как увеличивающаяся скорость dFp (отрицательное значение) у силы Fp сжатия тормозной педали во время начала отпускания тормозов становится меньше (то есть абсолютное значение увеличивающейся скорости dFp становится больше).
Также, в вышеприведенном варианте осуществления распределение, при котором сила торможения соответствующих задних колес меньше таковой у теоретического распределения, используется в качестве основного распределения. В качестве альтернативы распределение, которое аналогично теоретическому распределению, может использоваться в качестве основного распределения. В таком случае распределение, при котором сила торможения соответствующих задних колес больше таковой у теоретического распределения, используется в качестве первого распределения. Дополнительно в качестве альтернативы распределение, при котором сила торможения соответствующих задних колес меньше таковой у теоретического распределения, может использоваться в качестве основного распределения, а распределение, при котором сила торможения соответствующих задних колес равна или больше таковой у теоретического распределения, может использоваться в качестве первого распределения.
Кроме того, в вышеприведенном варианте осуществления условие этапов 810, 815 используется в качестве условия для начала первой операции управления ограничением галопирования. В качестве альтернативы условие для начала первой операции управления ограничением галопирования может включать в себя дополнительное условие о том, что транспортное средство движется в настоящее время. Аналогичным образом, в вышеприведенном варианте осуществления условие этапов 910, 915 используется в качестве условия для начала второй операции управления ограничением галопирования. В качестве альтернативы условие для начала второй операции управления ограничением галопирования может включать в себя дополнительное условие о том, что транспортное средство движется в настоящее время. Определение того, движется ли в настоящее время транспортное средство, может быть сделано на основе того, равна ли нулю скорость транспортного средства, которая получается на основе измерений датчиков 41fl, 41fr, 41rl, 41rr скорости вращения колеса.
К тому же в вышеприведенном варианте осуществления система электрического управления тормозами используется в качестве устройства управления тормозами. В качестве альтернативы в качестве устройства управления тормозами возможно использовать систему с регулируемым давлением, в которой само давление главного цилиндра подается в соответствующие тормозные цилиндры во время периода времени без управления и в которой соответствующие давления тормозных цилиндров приводятся к соответствующему другому давлению, которое отличается от давления главного цилиндра во время периода времени управления. В таком случае тормозное устройство (например, тормозная колодка, тормозной диск) каждого колеса проектируется для достижения основного распределения, как и распределение торможения с передней на заднюю ось в течение периода времени без управления, и соответствующие давления тормозных цилиндров приводятся к соответствующему другому давлению, которое отличается от давления главного цилиндра, только во время первой и второй операций управления ограничением галопирования для достижения первого и второго распределений.
В вышеприведенном варианте осуществления используются передняя левая и передняя правая независимые подвески FS и задняя левая и задняя правая независимые подвески RS. Однако настоящее изобретение не ограничивается данной системой подвески. Другими словами, одна передняя подвеска, которая поддерживает переднее левое и переднее правое колеса и имеет препятствующую продольному наклону кузова геометрию, и/или одна задняя подвеска, которая поддерживает заднее левое и заднее правое колеса и имеет препятствующую продольному подъёму кузова геометрию, может альтернативно использоваться в качестве системы подвески в настоящем изобретении.
В вышеприведенном варианте осуществления датчик 42 силы сжатия используется для определения времени начала внезапного применения тормозов и времени начала внезапного отпускания тормозов на основе силы торможения, измеренной с помощью датчика 42 силы сжатия. Вместо датчика 42 силы сжатия может использоваться общеизвестный датчик хода для измерения степени приведения в действие тормозной педали BP, и посредством этого определения времени начала внезапного применения тормозов и времени начала внезапного отпускания тормозов.
Дополнительные преимущества и модификации без труда возникнут у специалистов в данной области техники. Поэтому изобретение в целом не ограничивается показанными и описанными конкретными подробностями, характерным устройством и пояснительными примерами.
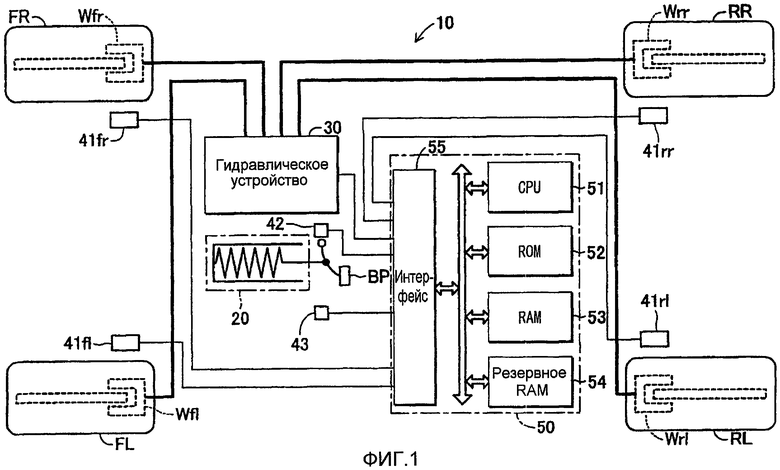
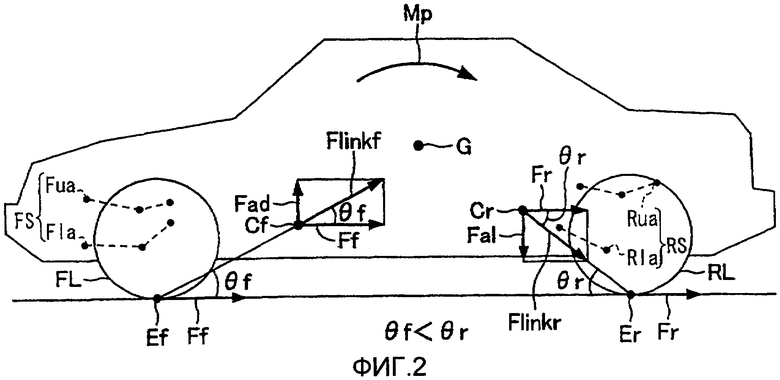

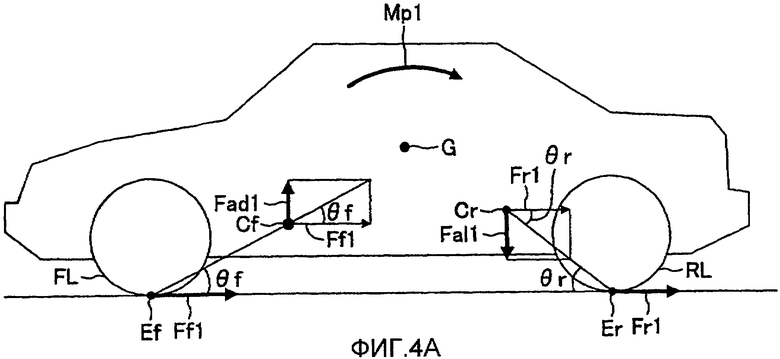
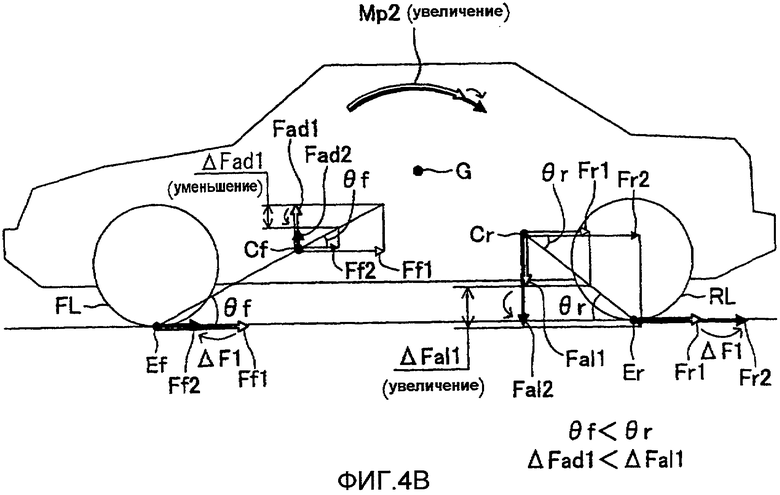
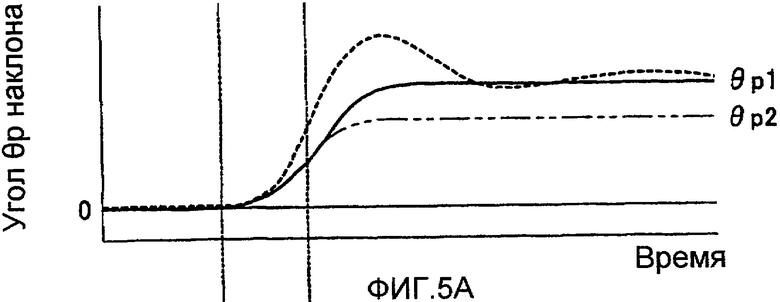
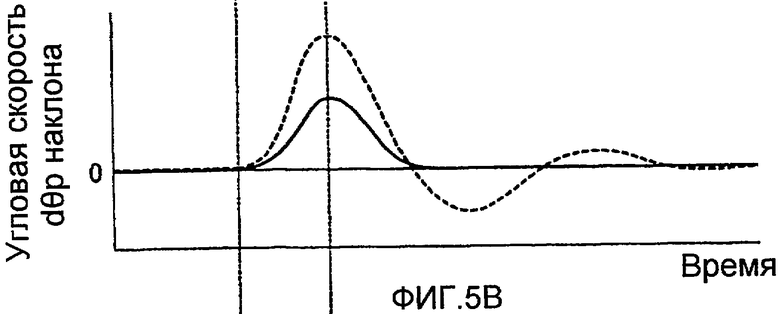
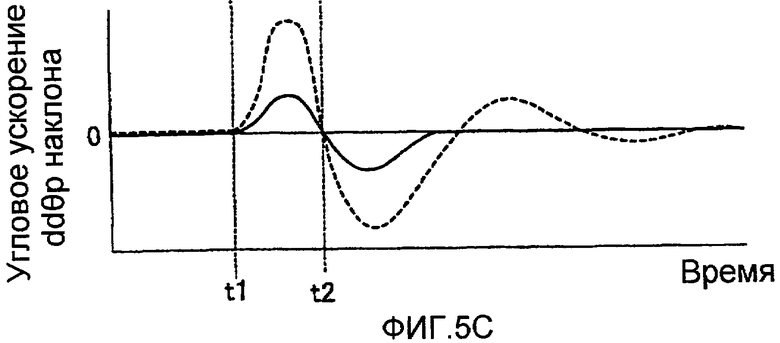
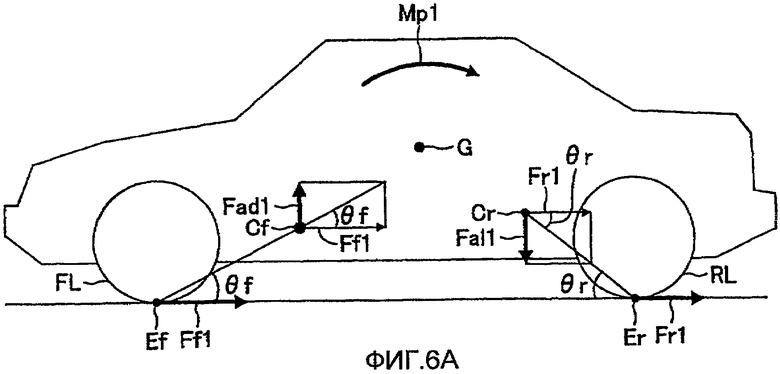
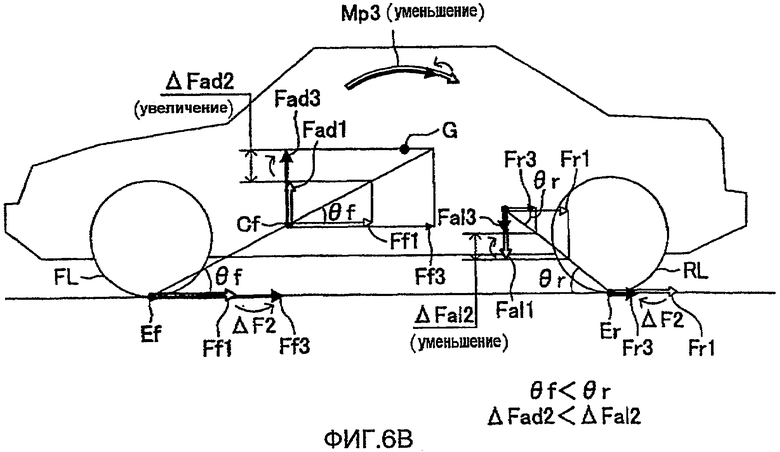
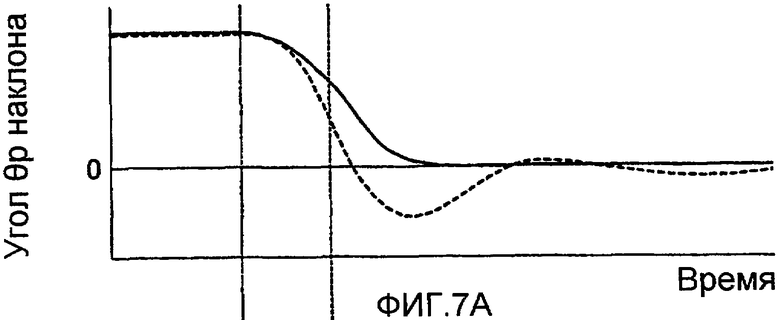
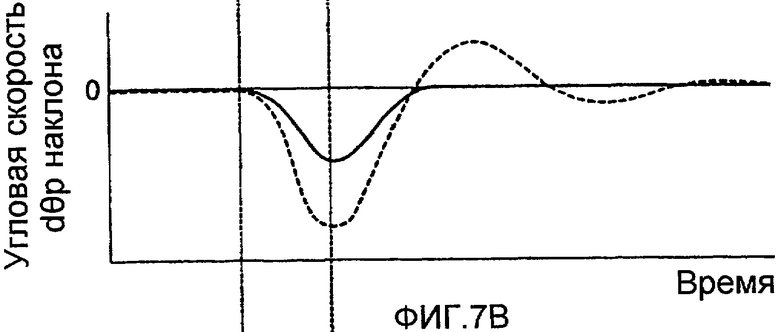
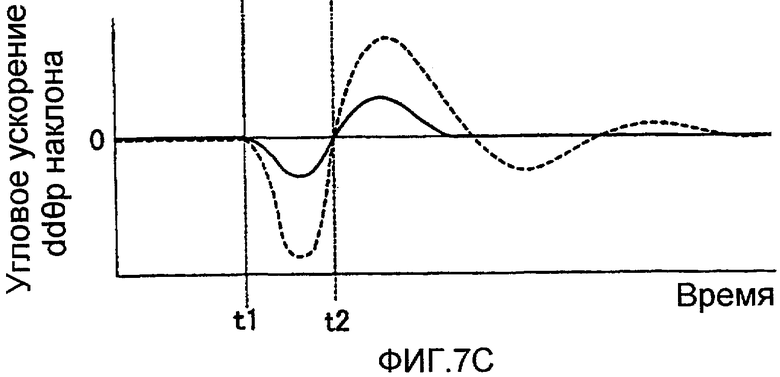
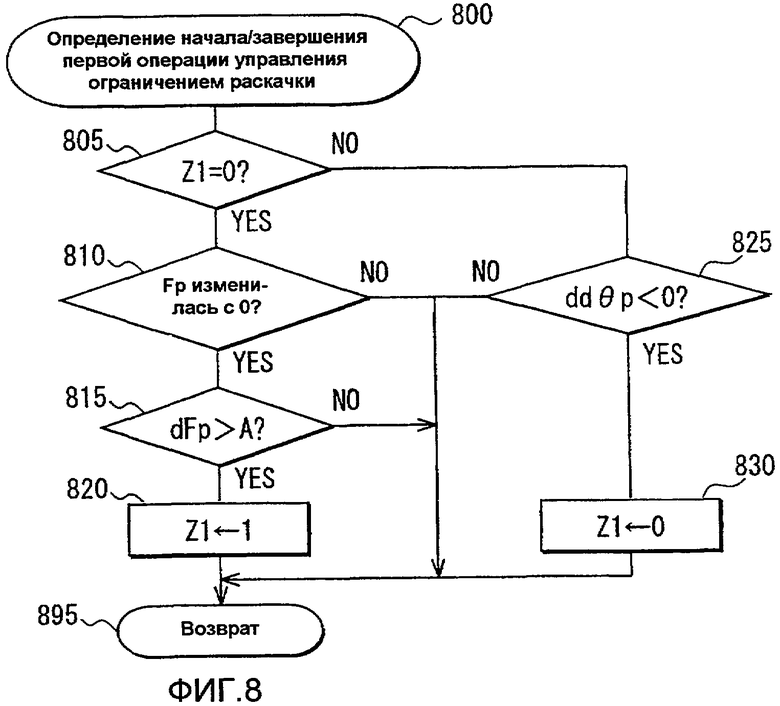
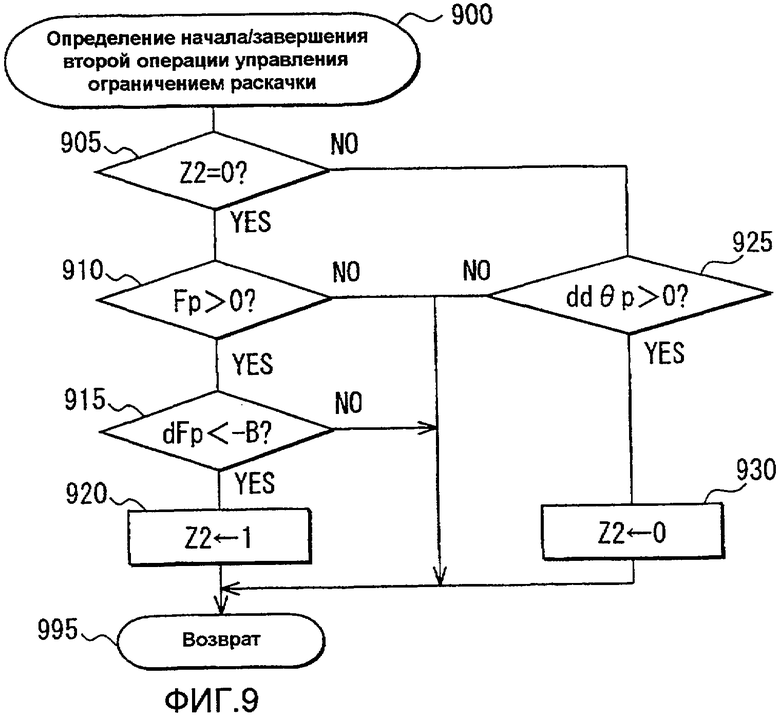
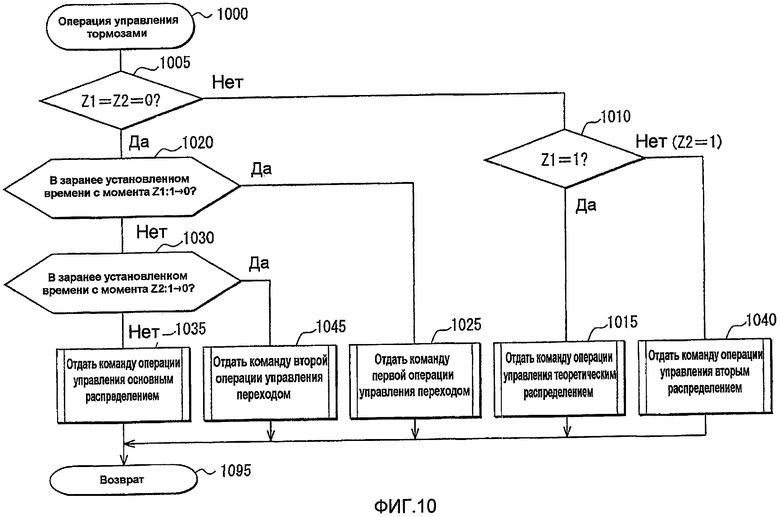
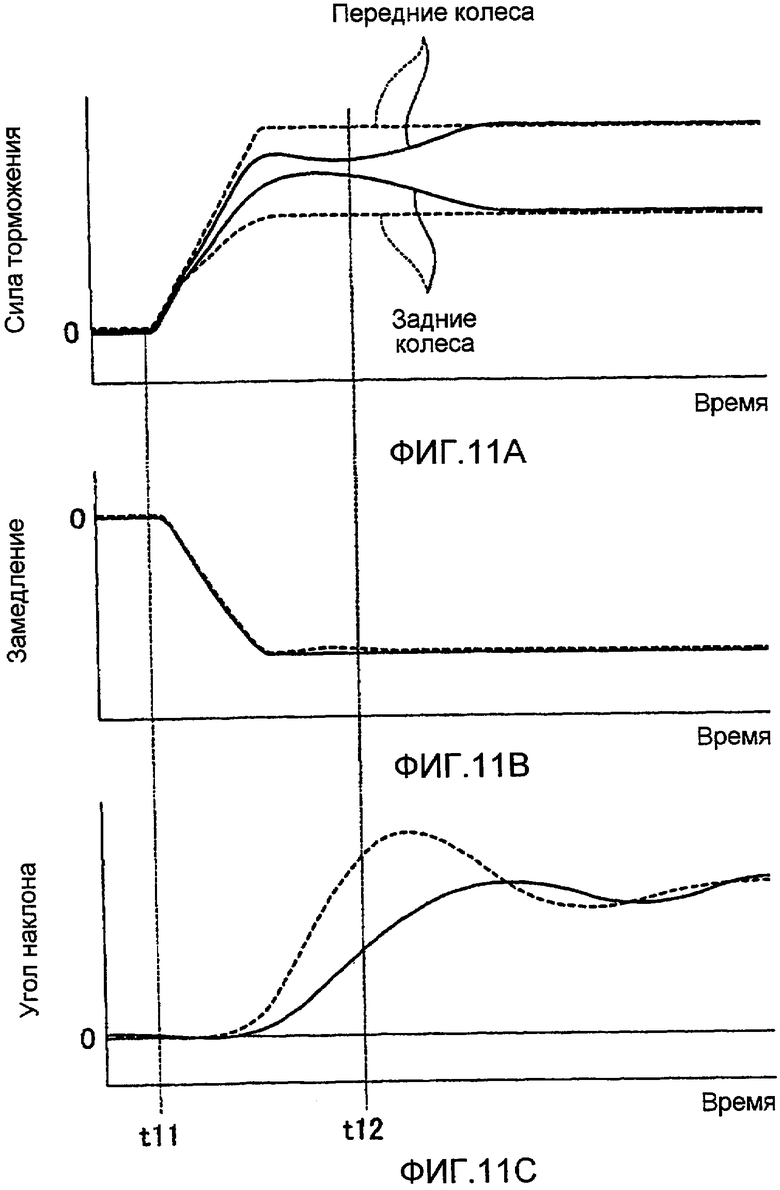
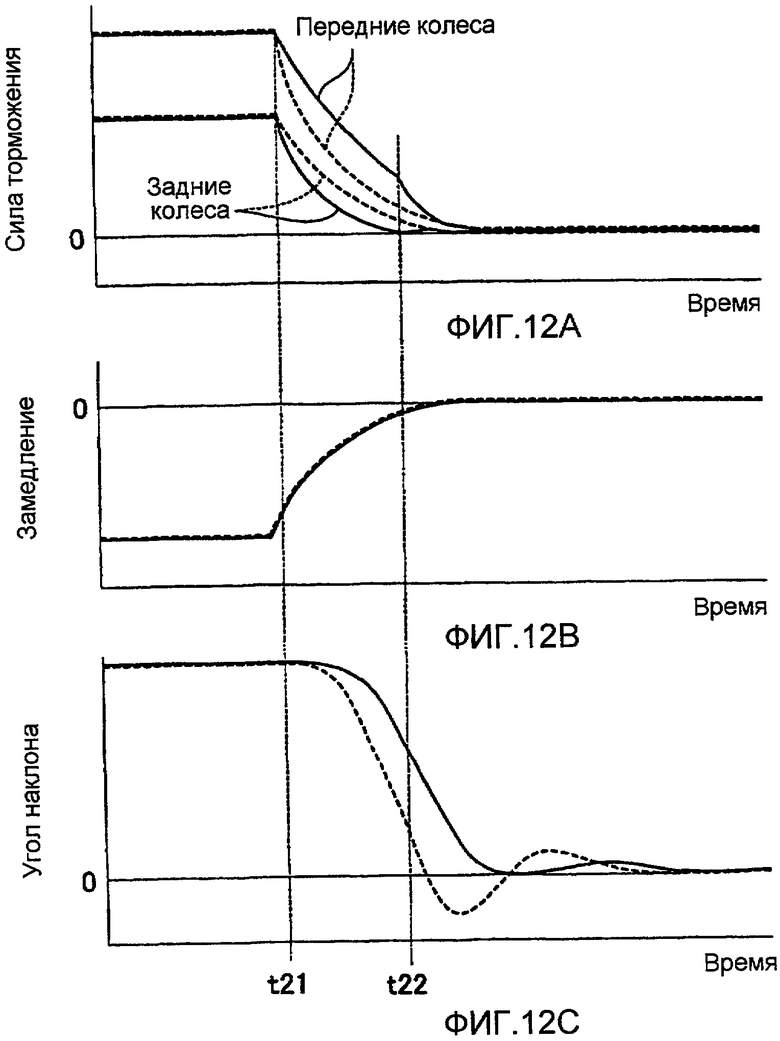
Изобретение относится к технике регулирования тормозного усилия в транспортных средствах в зависимости от транспортных и дорожных условий. Предложенная система управления движением используется в транспортном средстве, которое имеет подвески (FS) передних колес с препятствующей продольному наклону кузова геометрией и подвески (RS) задних колес с препятствующей продольному подъему кузова геометрией. Степень препятствующего продольному подъему кузова эффекта в препятствующей продольному подъему кузова геометрии больше степени препятствующего продольному наклону кузова эффекта в препятствующей продольному наклону кузова геометрии. Обычно контроллер управляет гидравлическим устройством из условия, чтобы распределение силы торможения между передними колесами (FL, FR) и задними колесами (RL, RR) во время периода торможения приводилось к основному распределению. В отличие от этого в состоянии, где начинается внезапное применение тормозов, контроллер управляет гидравлическим устройством из условия, чтобы распределение силы торможения приводилось к первому распределению, при котором сила торможения, соответственно примененная к задним колесам, больше таковой у основного распределения только в течение заранее установленного короткого периода времени после начала применения тормозов. Предложенная система может эффективно ограничивать галопирование транспортного средства во время периода торможения и может поддерживать относительно хорошее ощущение от поездки у пассажира(ов) во время не относящегося к торможению периода без предоставления специализированного механизма в подвесках транспортного средства. 5 з.п. ф-лы, 22 ил.
1. Система управления движением для транспортного средства, содержащая:
по меньшей мере, одну подвеску (FS) передних колес для множества передних колес (FL, FR) транспортного средства, имеющую препятствующую продольному наклону кузова геометрию;
по меньшей мере, одну подвеску (RS) задних колес для множества задних колес (RL, RR) транспортного средства, имеющую препятствующую продольному подъему кузова геометрию, причем изменение в степени препятствующего продольному подъему кузова эффекта (Fal) в препятствующей продольному подъему кузова геометрии относительно изменения в силе (Fr) торможения заднего колеса, соответственно приложенной к множеству задних колес (RL, RR), больше, чем изменение в степени препятствующего продольному наклону кузова эффекта (Fad) в препятствующей продольному наклону кузова геометрии относительно изменения в силе (Ff) торможения переднего колеса, соответственно приложенной к множеству передних колес (FL, FR);
устройство (30) управления тормозами, которое действует для независимого применения и управления силой (Ff) торможения переднего колеса и силой (Fr) торможения заднего колеса;
средство (50, 1035) реализации основного распределения для управления устройством (30) управления тормозами во время приведения в действие водителем исполнительного органа (ВР) тормозов транспортного средства, причем средство (50, 1035) реализации основного распределения управляет устройством (30) управления тормозами из условия, чтобы сумма силы (Ff) торможения переднего колеса и силы (Fr) торможения заднего колеса стала требуемым значением, которое соответствует степени (Fp) приведения в действие исполнительного органа (ВР) тормозов водителем, и распределение силы торможения между множеством передних колес (FL, FR) и множеством задних колес (RL, RR) стало основным распределением, при этом основное распределение является одним из:
распределения, которое равно теоретическому распределению, которое реализует одновременную блокировку множества передних колес (FL, FR) и множества задних колес (RL, RR), и
распределения, при котором сила (Fr) торможения заднего колеса меньше таковой у теоретического распределения, и
по меньшей мере, одно из средства (50, 800, 805, 810, 815, 820, 825, 830, 895, 1015) управления первым распределением и средства (50, 900, 905, 910, 915, 920, 925, 930, 995, 1040) управления вторым распределением, причем:
средство (50, 800, 805, 810, 815, 820, 825, 830, 895,1015) управления первым распределением предназначено для управления устройством (30) управления тормозами из условия, чтобы сумма силы (Ff) торможения переднего колеса и силы (Fr) торможения заднего колеса стала требуемым значением и распределение силы торможения между множеством передних колес (FL, FR) и множеством задних колес (RL, RR) стало первым распределением, при котором сила (Fr) торможения заднего колеса больше, чем таковая у основного распределения;
средство (50, 800, 805, 810, 815, 820, 825, 830, 895, 1015) управления первым распределением начинает управление устройством (30) управления тормозами, когда скорость (dFp) изменения в степени (Fp) приведения в действие исполнительного органа (ВР) тормозов для применения сил (Ff, Fr) торможения переднего и заднего колес становится больше заданной скорости;
средство (50, 800, 805, 810, 815, 820, 825, 830, 895, 1015) управления первым распределением прекращает управление устройством (30) управления тормозами, когда угловое ускорение (ddθp) угла (θр) наклона кузова транспортного средства в транспортном средстве переходит из положительного диапазона в отрицательный диапазон;
угол (θр) наклона кузова транспортного средства задается так, что когда передняя сторона кузова транспортного средства наклоняется вниз, угол (θр) наклона кузова транспортного средства находится в положительном диапазоне;
средство (50, 900, 905, 910, 915, 920, 925, 930, 995, 1040) управления вторым распределением предназначено для управления устройством (30) управления тормозами из условия, чтобы сумма силы (Ff) торможения переднего колеса и силы (Fr) торможения заднего колеса стала требуемым значением и распределение силы торможения между множеством передних колес (FL, FR) и множеством задних колес (RL, RR) стало вторым распределением, при котором сила (Fr) торможения заднего колеса меньше, чем таковая у основного распределения;
средство (50, 900, 905, 910, 915, 920, 925, 930, 995, 1040) управления вторым распределением начинает управление устройством (30) управления тормозами, когда скорость (dFp) изменения в степени (Fp) приведения в действие исполнительного органа (ВР) тормозов для ослабления сил (F1, Fr) торможения переднего и заднего колес становится больше заданной скорости;
средство (50, 900, 905, 910, 915, 920, 925, 930, 995, 1040) управления вторым распределением прекращает управление устройством (30) управления тормозами, когда угловое ускорение (ddθp) угла (θр) наклона кузова транспортного средства переходит из отрицательного диапазона в положительный диапазон.
2. Система по п.1, в которой:
препятствующая продольному наклону кузова геометрия в, по меньшей мере, одной подвеске (FS) передних колес задается так, что мгновенный центр (Cf) движения каждого переднего колеса (FL, FR) относительно кузова транспортного средства, вызванного ходом, по меньшей мере, одной подвески (FS) передних колес, располагается в точке, которая находится на верхней стороне точки (Ef) контакта с землей переднего колеса (FL, FR) и находится на задней стороне кузова транспортного средства точки (Ef) контакта с землей переднего колеса (FL, FR), если смотреть сбоку на кузов транспортного средства; и
препятствующая продольному подъему кузова геометрия в, по меньшей мере, одной подвеске (RS) задних колес задается так, что мгновенный центр (Сr) движения каждого заднего колеса (RL, RR) относительно кузова транспортного средства, вызванного ходом, по меньшей мере, одной подвески (RS) задних колес, располагается в точке, которая находится на верхней стороне точки (Еr) контакта с землей заднего колеса (RL, RR) и находится на передней стороне кузова транспортного средства точки (Еr) контакта с землей заднего колеса (RL, RR), если смотреть сбоку на кузов транспортного средства.
3. Система по п.1 или 2, включающая в себя средство (50, 800, 805, 810, 815, 820, 825, 830, 895, 1015) управления первым распределением.
4. Система по п.3, в которой:
основное распределение задается таким образом, чтобы сила (Fr) торможения заднего колеса была меньше таковой у теоретического распределения; и
первое распределение задается равным теоретическому распределению или задается распределением, при котором сила (Fr) торможения заднего колеса больше таковой у теоретического распределения.
5. Система по п.1 или 2, включающая в себя средство (50, 900, 905, 910, 915, 920, 925, 930, 995, 1040) управления вторым распределением.
6. Система по п.1 или 2, включающая в себя как средство (50, 800, 805, 810, 815, 820, 825, 830, 895, 1015) управления первым распределением, так и средство (50, 900, 905, 910, 915, 920, 925, 930, 995, 1040) управления вторым распределением.
| Способ обработки поверхностного слояцЕМЕНТОбЕТОННыХ пОКРыТий | 1979 |
|
SU823360A1 |
| DE 4118461 A1, 19.12.1991 | |||
| DE 10131323 А1, 02.05.2002 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ ПРИ ТОРМОЖЕНИИ НА ПОВОРОТЕ | 2000 |
|
RU2212348C2 |

