Область техники
Изобретение относится к устройству управления поведением транспортного средства и к способу управления поведением транспортного средства. Более конкретно, изобретение относится к устройству управления поведением транспортного средства, которое включает в себя установленный на транспортном средстве аккумулятор, на и с которого имеется возможность производить зарядку и разрядку электроэнергии; электродвигатели, которые предоставлены индивидуально для множества колес и которые, при снабжении электрической энергией от установленного на транспортном средстве аккумулятора прикладывают, к соответствующим одним из колес, приводной момент или снабжают, установленный на транспортном средстве аккумулятор, рекуперативной электрической энергией, вызывая создание соответствующими одними из колес рекуперативного тормозного момента; и средство управления трением, управляющее генерированием тормозного момента от трения колесами.
Уровень техники
Известно тормозное устройство, которое создает во время экстренного торможения более высокую тормозную силу, нежели во время штатного торможения (см., например, публикацию JP 2007-50751). Известное тормозное устройство включает в себя: средство торможения для обеспечения колесами тормозной силы от трения; и электродвигатель, который обеспечивает создание рекуперативной тормозной силы колесами. Рекуперативная электроэнергия, создаваемая электродвигателем, когда генерируется рекуперативная тормозная сила на колесах, возвращается в аккумулятор. Кроме того, этот электродвигатель служит в качестве источника энергии транспортного средства, который приводит в движение колеса при питании электроэнергией от аккумулятора.
В упомянутом тормозном устройстве, в начале, определяется состояние заряда аккумулятора. Затем, на основании определенного состояния заряда аккумулятора, рассчитывается величина рекуперативной тормозной силы, которая может быть создана электродвигателем, и, во время экстренного торможения, характер тормозной силы от трения меняется в соответствии с рассчитанной величиной рекуперативной тормозной силы. Конкретно, чем меньше рассчитанная рекуперативная тормозная сила, тем больше, во время экстренного торможения, увеличивается величина тормозной силы от трения, или, во время экстренного торможения, увеличивается максимальная тормозная сила. Следовательно, в соответствии с вариантом тормозного устройства, описанного выше, можно предотвратить снижение, во время экстренного торможения, способности к реагированию торможения, вызванное малой величиной рекуперативной тормозной силы, которую может создать электродвигатель.
На сегодняшний день, существуют различные системы управления поведением транспортного средства, которые выполняют свои задачи путем создания разных для каждого из колес тормозных сил и приводных сил, такие как ABS (Антиблокировочная Тормозная Система), которая предотвращает блокирование колес во время торможения, TCS (Система Контроля Тяги или Антипробуксовочная Система), которая предотвращает пробуксовку колес во время ускорения, VSC (Управление Устойчивостью Транспортного средства), которая стабилизирует поведение транспортного средства при движении в повороте и т.д. Такие системы требуют механизма или конструкции, которые способны делать так, чтобы создавались разные для каждого из колес тормозные силы и приводные силы.
В отличие от транспортного средства, оборудованного только одним электродвигателем, способным приводить в действие колеса, как описано в JP 2007-50751, в транспортном средстве, в котором электродвигатели предоставлены отдельно для индивидуальных колес, а колеса приводятся посредством их соответствующих электродвигателей, электродвигатели из индивидуальных электродвигателей способны приводить их соответствующие колеса с разными приводными силами, а также способны вызывать генерирование колесами при торможении разных рекуперативных тормозных сил и возвращаемую в аккумулятор рекуперативную электроэнергию. Вследствие этого, используя электродвигатели индивидуальных колес, можно реализовать системы управления поведением транспортного средства, такие как ABS, VSC и т.д.
Тем не менее, на аккумулятор может совсем не подаваться рекуперативная электроэнергия или подаваться только небольшая величина рекуперативной электроэнергии, когда аккумулятор находится в полностью заряженном состоянии или в состоянии, близком к состоянию полного заряда. Отсюда, если создание рекуперативной тормозной силы на колесах ограничено, принятой во внимание, величиной электричества, накопленного в аккумуляторе, становится необходимым увеличить, с соблюдением требуемой тормозной силы на колесе, тормозную силу от трения на величину падения рекуперативной тормозной силы. Как результат, если реализуется система управления поведением транспортного средства, в которой необходимо добиться от каждого из индивидуальных колес создания разной тормозной силы, становится необходимым предоставить механизм гидравлического управления, который способен создавать отличающиеся друг от друга тормозные силы от трения на индивидуальных колесах, посредством размещения, отдельно для индивидуальных колес, клапанов увеличения давления или клапанов уменьшения давления, или что-либо подобного. В системе, которая не имеет такого механизма гидравлического управления, неизбежно отключается работа системы управления поведением транспортного средства, когда аккумулятор находится в полностью заряженном состоянии или близком к состоянию полного заряда.
Краткое описание изобретения
Согласно изобретению создано устройство управления поведением транспортного средства, способное соответственно осуществлять управление поведением транспортного средства путем использования электродвигателей, которые раположены индивидуально для колес, даже во время полностью заряженного состояния аккумулятора, без необходимости в обеспечении механизмом гидравлического управления, который независимо управляет тормозной силой от трения каждого колеса.
Первый аспект изобретения относится к устройству управления поведением транспортного средства, которое содержит: установленный на транспортном средстве аккумулятор, на который и с которого производится зарядка и разрядка электроэнергии; электродвигатели, расположенные индивидуально для множества колес транспортного средства и прикладывающие приводной момент к соответствующим одним из колес при приложении к ним электроэнергии от установленного на транспортном средстве аккумулятора или передающие рекуперативную электроэнергию к установленному на транспортном средстве аккумулятору от соответствующих одних из колес, генерирующих рекуперативный тормозной момент; и средство управления трением для генерирования колесами тормозного момента от трения, и которое управляет поведением транспортного средства посредством создания тормозных/приводных усилий, прикладываемых индивидуально к колесам, отличных друг от друга. Устройство управления поведением транспортного средства включает в себя средство вычисления требуемого момента для вычисления, основываясь на поведении транспортного средства, требуемых моментов, которые требуется индивидуально генерировать колесам; и средство установки значения момента для установки, согласно требуемому моменту каждого колеса, вычисленному средством вычисления требуемого момента, значения первого момента, предоставляемого одинаково для всех колес, которое составлено из тормозного момента от трения, который генерирует колесо посредством средства управления трением, и значения второго момента, предоставляемого для каждого колеса независимо друг от друга, которое составлено из, по меньшей мере, одного из приводного момента и рекуперативного тормозного момента, которые генерирует колесо посредством соответствующего одного из электродвигателей.
В этом аспекте, требуемые моменты, которые требуется создать каждым колесом, вычисляются на основе поведения транспортного средства. Затем, с соблюдением требуемого момента каждого из колес, значение момента, предоставленное одинаковым для колес, устанавливается как значение тормозного момента от трения, которое создается на колесе средством управления трения, а значение момента, предоставленное для каждого одного из электродвигателей колес независимо друг от друга, устанавливается в качестве значения приводного момента или рекуперативного тормозного момента, которые создаются на колесе. Следовательно, требуемые моменты могут быть соответственно приложены к индивидуальным колесам, в то время как тормозные моменты от трения на колесах одинаковы так, что нет необходимости предоставлять механизм гидравлического управления, способный создавать отличные друг от друга тормозные моменты от трения на колесах. Следовательно, устройство управления поведением транспортного средства способно соответственно управлять поведением транспортного средства путем использования электродвигателей, предоставленных индивидуально для колес, без необходимости предусматривать механизм гидравлического управления, который независимо управляет тормозными моментами от трения индивидуальных колес.
В упомянутом устройстве управления поведением транспортного средства, средство установки значения момента может включать в себя средство измерения величины оставшегося заряда для измерения величины оставшегося заряда установленного на транспортном средстве аккумулятора и средство изменения распределения момента для изменения распределения между значением первого момента и значением второго момента в соответствии с величиной оставшегося заряда, измеренным средством измерения величины оставшегося заряда.
В этой конструкции, пропорция распределения между тормозным моментом от трения каждого колеса, от средства управления трением, и приводным моментом или рекуперативным тормозным моментом колеса, от соответствующего одного из электродвигателей, чьи пропорции установлены с соблюдением требуемого момента этого колеса, изменяется в соответствии с величиной оставшегося заряда, установленного на транспортном средстве, аккумулятора. С соблюдением точного требуемого момента колеса, если размер распределения тормозного момента от трения, от средства управления трением, возросло, необходимо увеличить размер распределения приводного момента, от соответствующего электродвигателя, или понизить размер распределения рекуперативного тормозного момента, от электродвигателя, и, следовательно, может быть выработана б'ольшая электроэнергия, потребляемая электродвигателем, или может быть сгенерирована меньшая рекуперативная электроэнергия, возвращаемая в аккумулятор. Соблюдая это, когда величина оставшегося заряда установленного на транспортном средстве аккумулятора относительно большая, увеличение размера распределения тормозного момента от трения, который одинаково генерируют колеса посредством средства управления трением, может позволить сделать размер распределения момента, созданного на каждом колесе соответствующим одним из электродвигателей, меньше в аспекте рекуперации электроэнергии и больше в аспекте потребления электроэнергии. Отсюда, даже когда установленный на транспортном средстве аккумулятор полностью заряжен, управление поведением транспортного средства может быть соответственно управляемо путем использования электродвигателей, предоставленных для индивидуальных колес, без необходимости в обеспечении механизма гидравлического управления, который управляет тормозным моментом от трения каждого из колес независимо друг от друга.
Кроме того, в упомянутом устройстве управления поведением транспортного средства, средство изменения распределения момента может увеличить размер распределения значения первого момента для величины оставшегося заряда, которая является относительно большой.
Более того, средство изменения распределения момента может увеличивать размер распределения значения второго момента, состоящего из приводного момента, если размер распределение значения первого момента увеличился.
Кроме того, средство изменения распределения момента может снижать размер распределения значения второго момента, состоящего из рекуперативного тормозного момента, если размер распределения значения первого момента увеличился.
В такой конструкции, если размер распределения тормозного момента от трения, который колеса одинаково вызваны создавать средством управления трением, делается больше, чем больше величина оставшегося заряда установленного на транспортном средстве аккумулятора, можно сделать размер распределения момента каждого колеса, созданного соответствующим одним из электродвигателей, меньше в аспекте рекуперации электроэнергии и больше в аспекте потребления электроэнергии. Отсюда, даже когда установленный на транспортном средстве аккумулятор полностью заряжен, поведение транспортного средства может быть соответственно управляемо путем использования электродвигателей, предоставленных для индивидуальных колес, без необходимости в обеспечении механизма гидравлического управления, который управляет тормозным моментом от трения каждого из колес независимо друг от друга.
В упомянутом устройстве управления поведением транспортного средства, средство изменения распределения момента может установить значение второго момента, который состоит только из приводного момента, когда величина оставшегося заряда находится в полностью заряженном состоянии.
Кроме того, в промежутке времени, во время которого величина оставшегося заряда находится, по меньшей мере, в полностью заряженном состоянии, средство изменения распределения момента может изменять распределение между значением первого момента и значением второго момента таким образом, что общее значение значений второго момента, в этот промежуток времени, находится в аспекте приводного момента.
В этой конструкции, когда величина оставшегося заряда находится, по меньшей мере, в полностью заряженном состоянии, общее значение момента, полученное суммированием значений момента, установленных для электродвигателей колес, находится в аспекте приводного момента, так что электроэнергия аккумулятора может целиком потребляться для привода электродвигателей. Отсюда, даже когда установленный на транспортном средстве аккумулятор полностью заряжен, поведение транспортного средства может быть соответственно управляемо путем использования электродвигателей, предоставленных для индивидуальных колес, без необходимости в обеспечении механизма гидравлического управления, который управляет тормозным моментом от трения каждого из колес независимо друг от друга.
В упомянутом устройстве управления поведением транспортного средства, средство управления трением может быть механизмом управления трением, который одновременно прикладывает одинаковые тормозные моменты от трения к, по меньшей мере, двум колесам.
В этой конструкции, так как одинаковые тормозные моменты от трения могут быть одновременно приложены к, по меньшей мере, двум колесам, становится ненужным использование механизма гидравлического управления, который управляет тормозным моментом от трения каждого из колес независимо друг от друга.
Механизм управления трением может включать в себя: главный цилиндр, который подключает к средству работы тормоза колесный цилиндр, который предоставлен отдельно для каждого колеса и который взаимодействует с главным цилиндром посредством трубопровода сообщения, так, чтобы приложить тормозной момент от трения к колесам; насос, способный нагнетать тормозную жидкость под высоким давлением; и линейный клапан, который регулирует давление тормозной текучей среды, которая подается с нагнетающей стороны насоса и выходит в накопительный бак, в каждом колесном цилиндре.
Более того, в устройстве управления поведением транспортного средства, средство вычисления требуемого момента может, основываясь на разнице размера целевого отклонения от курса и размера фактического отклонения от курса транспортного средства, вычислять требуемый момент, который необходимо создать, отдельно для каждого колеса, чтобы стабилизировать поведение транспортного средства при движении в повороте.
Кроме того, средство вычисления требуемого момента может, основываясь на разнице размера целевого отклонения от курса и размера фактического отклонения от курса транспортного средства и ускорения транспортного средства, вычислять требуемый момент, который необходимо создать, отдельно для каждого колеса, чтобы стабилизировать поведение транспортного средства при движении в повороте.
Средство вычисления требуемого момента может определять происходит ли или нет проскальзывание колеса, вызванное приложением приводного момента, в отношении каждого колеса, и может вычислять, основываясь на результатах определения относительно проскальзывания колеса, требуемый момент, который необходимо создать, отдельно для каждого колеса, чтобы удержать каждое колесо от пробуксовки во время ускорения.
Средство вычисления требуемого момента может определять происходит ли или нет скольжение колеса, вызванное приложением тормозного момента, в отношении каждого колеса, и может вычислять, основываясь на результатах определения относительно скольжения, требуемый момент, который необходимо создать, отдельно для каждого колеса, чтобы удержать каждое колесо от блокировки во время торможения.
Второй аспект изобретения относится к способу управления поведением транспортного средства, который содержит: установленный на транспортном средстве аккумулятор, на который и с которого производится зарядка и разрядка электроэнергии; электродвигатели, расположенные индивидуально для множества колес транспортного средства и прикладывающие приводной момент к соответствующим одним из колес при приложении к ним электроэнергии от установленного на транспортном средстве аккумулятора или передающие рекуперативную электроэнергию к установленному на транспортном средстве аккумулятору от соответствующих одних из колес, генерирующих рекуперативный тормозной момент; и средство управления трением для генерирования колесами тормозного момента от трения, и которое управляет поведением транспортного средства посредством создания тормозных/приводных усилий, прикладываемых индивидуально к колесам, отличных друг от друга. Согласно способу управления поведением транспортного средства: вычисляют, основываясь на поведении транспортного средства, требуемые моменты, которые требуется генерировать колесам; и устанавливают, согласно вычисленному требуемому моменту, значение первого момента, которое составлено из тормозного момента от трения, который генерирует каждое колесо посредством средства управления трением, и значение второго момента, которое составлено из, по меньшей мере, одного из приводного момента и рекуперативного тормозного момента, которые независимо генерирует каждое колесо посредством соответствующего одного из электродвигателей.
Кроме того, согласно способу управления поведением транспортного средства дополнительно измеряют величину оставшегося заряда установленного на транспортном средстве аккумулятора и изменяют распределение между значением первого момента и значением второго момента в соответствии с величиной оставшегося заряда.
В соответствии с изобретением, даже когда установленный на транспортном средстве аккумулятор полностью заряжен, поведение транспортного средства может быть соответственно управляемо путем использования электродвигателей, предоставленных для индивидуальных колес, без необходимости в обеспечении механизма гидравлического управления, который управляет тормозным моментом от трения каждого из колес независимо друг от друга.
Краткое описание чертежей
Вышеупомянутые и другие объекты, признаки и преимущества изобретения станут очевидными из последующего описания вариантов осуществления, со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции используются для обозначения идентичных элементов. На чертежах:
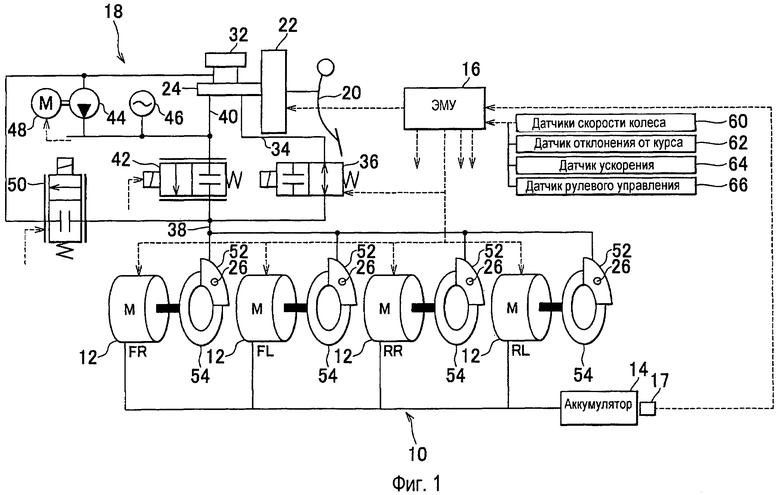
Фиг. 1 - конструктивная схема тормозной/приводной системы, установленной на транспортном средстве, которое оборудовано устройством управления поведением транспортного средства согласно варианту осуществления изобретения;
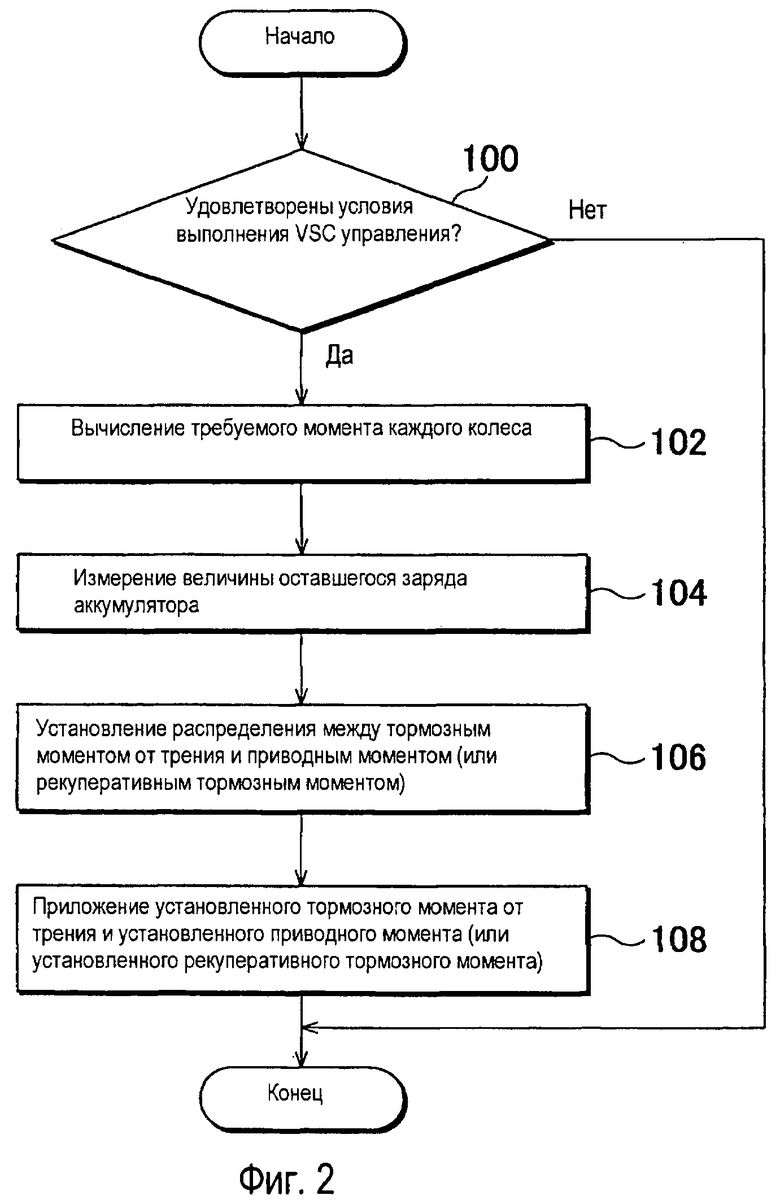
Фиг. 2 - блок-схема примера программы управления, которая выполняется устройством управления поведением транспортного средства согласно этому варианту осуществления для того, чтобы произвести VSC управление;
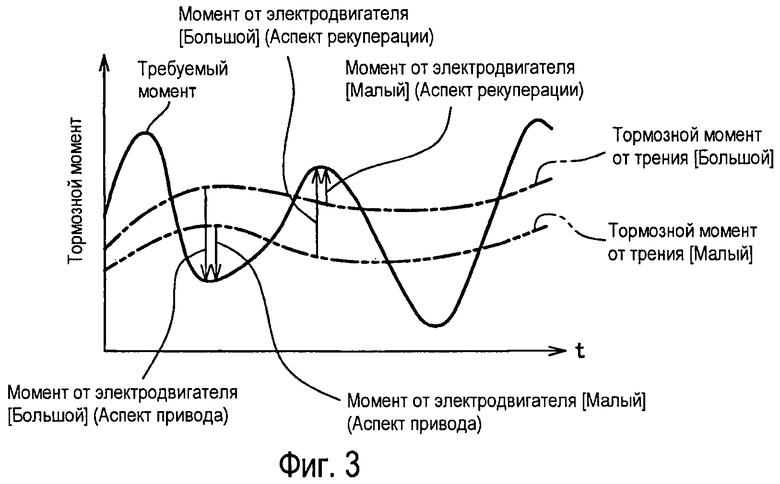
Фиг. 3 - схема, иллюстрирующая то, каким образом приводной момент или рекуперативный тормозной момент, от электродвигателя, изменяется и устанавливается в соответствии с переключением между двумя уровнями тормозного момента от трения, создаваемого механизмом управления трением, которые установлены с соблюдением требуемых моментов, которые требуются на колесах FR, FL, RR, RL (FR - переднее левое, FL - переднее правое, RR - заднее правое, RL - заднее левое) во время выполнения VSC управления; и
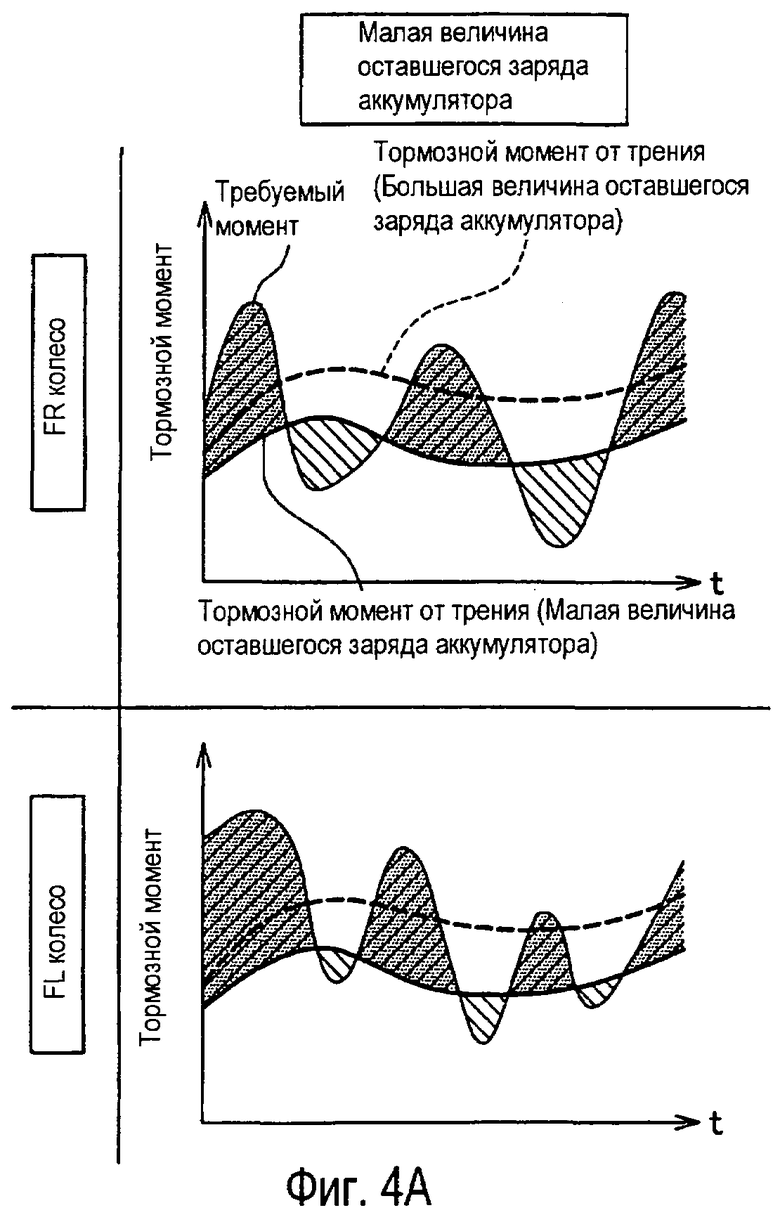
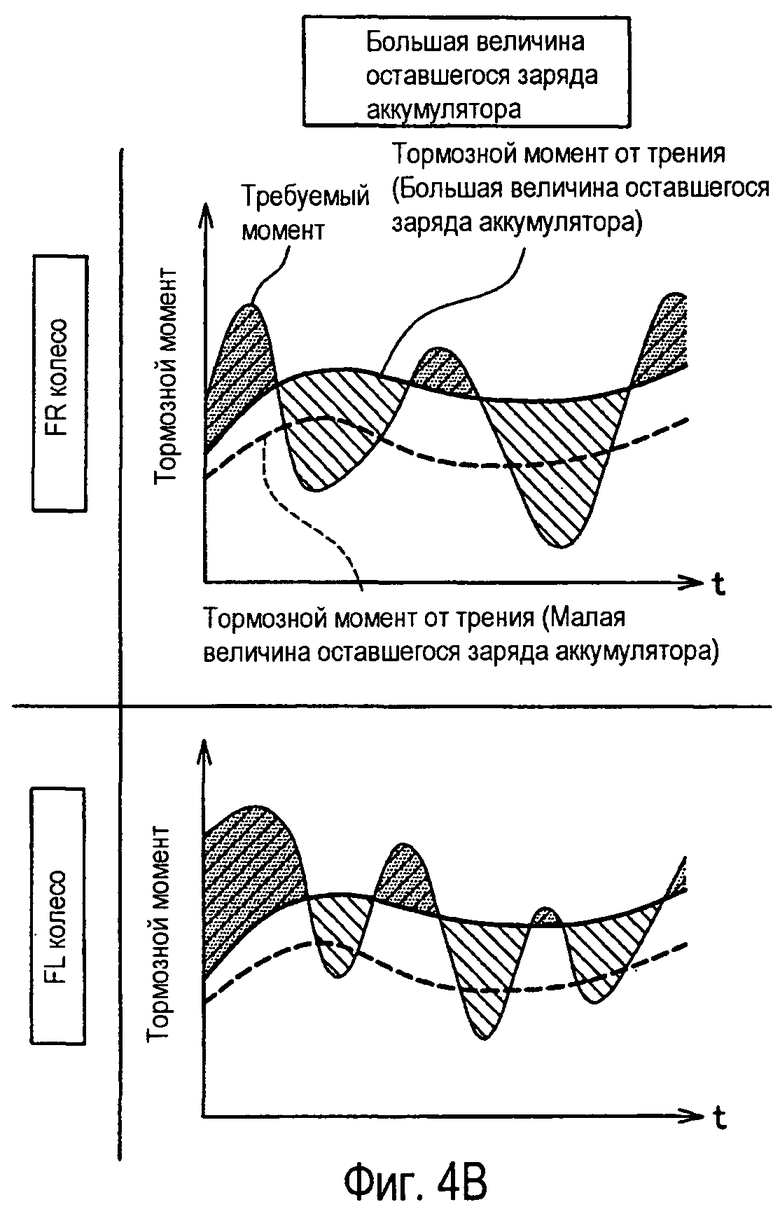
Фиг. 4A и Фиг. 4B - схемы для объяснения того, что в устройстве управления поведением транспортного средства согласно варианту осуществления, распределение между приводным моментом или рекуперативным тормозным моментом, от электродвигателя, колеса и тормозным моментом от трения, от механизма торможения трением, которые установлены с соблюдением требуемых моментов, которые требуются на колесах во время выполнения VSC управления, изменяется в соответствии с величиной оставшегося заряда установленного на транспортном средстве аккумулятора.
Подробное описание вариантов осуществления изобретения
Конкретные варианты осуществления изобретения будут описаны далее со ссылкой на чертежи.
Фиг. 1 иллюстрирует конструктивную схему тормозной/приводной системы 10, установленной на транспортном средстве, оборудованном устройством управления поведением транспортного средства в соответствии с вариантом осуществления изобретения. В этом варианте осуществления, транспортное средство является так называемым транспортным средством с электродвигателем в колесе (мотор-колесо), оборудованным электродвигателями, которые предоставлены индивидуально для колес, в качестве устройств привода, которые приводят соответствующие колеса. Следующее описание будет сделано на примере транспортного средства с четырьмя ведущими колесами, чьи все четыре колеса приводятся посредством электродвигателей.
Тормозная/приводная система 10 имеет электродвигатели 12, которые расположены индивидуально для колес FR, FL, RR, RL. Каждый электродвигатель 12 связан с соответствующим одним из колес FR, FL, RR, RL посредством редуктора скорости или т.п. Кроме того, электродвигатели 12 электрически подключены к установленному на транспортном средстве аккумулятору 14 и подают и принимают электрическую энергию к и от установленного на транспортном средстве аккумулятора 14.
Электродвигатель 12 электрически подключен к электронному модулю 16 управления (ЭМУ) устройства управления поведением транспортного средства. Каждый электродвигатель 12 прикладывает к соответствующему одному из колес FR, FL, RR, RL приводной момент для привода этого колеса посредством электроэнергии, которая подается от установленного на транспортном средстве аккумулятора 14 по управляющему сигналу, посланному от ЭМУ 16. Кроме того, каждый электродвигатель 12 имеет возможность, во время торможения, работать в качестве генератора, то есть имеет возможность подавать рекуперативную электрическую энергию установленного на транспортном средстве аккумулятора 14 во время создания рекуперативного тормозного момента для соответствующего одного из колес FR, FL, RR, RL.
Датчик 17 состояния аккумулятора, который определяет состояния установленного на транспортном средстве аккумулятора 14, такие как: напряжение на контактах, текущая зарядка/разрядка, температура аккумулятора и т.д., электрически подключен к ЭМУ 16. ЭМУ 16 измеряет различные состояния установленного на транспортном средстве аккумулятора 14 на основе выходных данных датчика 17 состояния аккумулятора и, таким образом, измеряет величину оставшегося заряда аккумулятора.
Кроме того, тормозная/приводная система 10 также включает в себя механизм 18 управления трением, который вызывает создание колесами FR, FL, RR, RL тормозного момента от трения за счет действия давления тормозной жидкости (гидравлического давления), отдельно от рекуперативного тормозного момента, предоставляемого посредством электродвигателей 12. Механизм 18 управления трением содержит: педаль 20 тормоза, которая управляется водителем транспортного средства; главный цилиндр 24, который подключен к педали 20 тормоза посредством усилителя 22; и колесные цилиндры 26 колес FR, FL, RR, RL, которые подключены к главному цилиндру 24.
Усилитель 22 электрически подключен к ЭМУ 16. Усилитель 22, по команде от ЭМУ 16, создает вспомогательную силу для усиления, посредством заранее установленной пропорции усиления, исходной силы от педали 20 тормоза, когда педаль 20 тормоза выжата. Кроме того, главный цилиндр 24 преобразует силу выжатой педали 20 тормоза в гидравлическое давление тормозной текучей среды посредством усиления, в заранее установленной пропорции, силы.
Накопительный бак 32, который хранит тормозную жидкость, подключен к камере гидравлического давления главного цилиндра 24. Кроме того, к камере гидравлического давления главного цилиндра 24 подключен первый трубопровод 34 связи. Трубопровод 38 высокого давления подключен к первому трубопроводу 34 связи посредством главного клапана 36 отсечки. Главный клапан 36 отсечки является электромагнитным клапаном нормально-открытого типа, который электрически подключен к ЭМУ 16. Главный клапан 36 отсечки принимает закрытое состояние за счет подачи управляющего сигнала от ЭМУ 16.
Трубопровод 38 высокого давления разделен на отводные трубопроводы 38FR, 38FL, 38RR, 38RL, чьи обозначения идентичны обозначениям колес FR, FL, RR, RL (конкретно, четыре). Каждый из отводных трубопроводов 38FR, 38FL, 38RR, 38RL связан с камерой гидравлического давления колесного цилиндра 26 соответствующего одного из колес FR, FL, RR, RL. То есть главный клапан 36 отсечки имеет функцию открытия и закрытия связи, посредством первого трубопровода 34 связи, между главным цилиндром 24 и колесными цилиндрами 26. Гидравлическое давление, созданное главным цилиндром 24, передается каждому колесному цилиндру 26 через главный клапан 36 отсечки, когда главный клапан 36 отсечки открыт, и не передается колесным цилиндрам 26 через главный клапан 36 отсечки, когда главный клапан 36 отсечки закрыт.
Кроме того, к камере гидравлического давления главного цилиндра 24 подключен второй трубопровод 40 связи. Трубопровод 38 высокого давления подключен во взаимодействие со вторым трубопроводом 40 связи, посредством линейного клапана 42 увеличения давления. Линейный клапан 42 увеличения давления является клапаном нормально-закрытого типа, который электрически подключен к ЭМУ 16, и также является линейным клапаном, чья степень открытия регулируется в соответствии с управляющим сигналом, передаваемым ЭМУ 16. Линейный клапан 42 увеличения давления имеет функцию увеличения и регулирования гидравлического давления тормозной жидкости (давления в колесном цилиндре), которое передается со стороны второго трубопровода 40 связи на сторону трубопровода 38 высокого давления.
Механизм 18 управления трением имеет насос 44 и накопитель 46. Сторона противотока насоса 44 подключена к накопительному баку 32, а его же сторона прямотока подключена ко второму трубопроводу 40 связи. Насос 44 подключен к мотору 48 насоса, который электрически подключен к ЭМУ 16, и работает посредством привода от мотора 48 насоса. Мотор 48 насоса приводится в действие, как только подается управляющий сигнал от ЭМУ 16. Насос 44, когда он приводится в действие мотором 48 насоса, выкачивает тормозную жидкость из накопительного бака 32 и нагнетает тормозную жидкость с высоким давлением во второй трубопровод 40 связи на стороне противотока линейного клапана 42 увеличения давления.
Накопитель 46 подключен ко второму трубопроводу 40 связи, с нагнетающей стороной насоса 44. Накопитель 46 имеет функцию накопления гидравлического давления тормозной текучей среды под высоким давлением, которое создается выжатой педалью 20 тормоза или которое увеличено, приведенным в действие, насосом 44. Также допустимо заимствовать конструкцию, в которой, когда гидравлическое давление тормозной текучей среды (давление в накопителе) в накопителе 46 достигает заранее установленного давления (например, 30 МПа), открывается разгрузочный клапан (не показан), чтобы выпустить тормозную текучую среду под высоким давлением в накопительный бак 32. Кроме того, со стороны противотока, в точке подключения во втором трубопроводе 40 связи, к которой также подключена нагнетающая сторона насоса 44, может быть предоставлен обратный клапан, для того чтобы предотвратить обратный ток тормозной текучей среды под высоким давлением с нагнетающей стороны насоса 44 в главный цилиндр 24 через второй трубопровод 40 связи.
Трубопровод 38 высокого давления подключен во взаимодействие с накопительным баком 32 посредством линейного клапана 50 понижения давления. Линейный клапан 50 понижения давления является клапаном нормально-закрытого типа, который электрически подключен к ЭМУ 16 и является линейным клапаном, чья степень открытия регулируется, в соответствии с управляющим сигналом, передаваемым ЭМУ 16. Линейный клапан 50 понижения давления имеет функцию снижения и регулирования гидравлического давления (давления в колесном цилиндре) тормозной жидкости в трубопроводе 38 высокого давления.
Колесный цилиндр 26, каждого из колес FR, FL, RR, RL, прижимает, посредством гидравлического давления тормозной жидкости передаваемого трубопровода 38 высокого давления, тормозные колодки соответствующего суппорта 52 к тормозному диску 54, который вращается совместно с соответствующим одним из колес FR, FL, RR, RL. Таким образом, на каждом соответствующем одном из колес FR, FL, RR, RL создается тормозной момент от трения в соответствии с гидравлическим давлением в каждом из колесных цилиндров 26, посредством работы этого колесного цилиндра 26.
Множество других датчиков и т.п. также электрически подключено к ЭМУ 16, включая датчики 60 скорости колеса, датчик 62 отклонения от курса, датчик 64 ускорения и датчик 66 рулевого управления. Датчик 60 скорости колеса расположен на каждом из колес FR, FL, RR, RL и снабжает ЭМУ 16 сигналом, соизмеримым со скоростью соответствующего одного из колес. Датчик 62 отклонения от курса снабжает ЭМУ 16 сигналом, соизмеримым с размером отклонения от курса кузова транспортного средства. Датчик 64 ускорения снабжает ЭМУ 16 сигналами, соизмеримыми с ускорениями кузова транспортного средства в направлениях: по ходу движения, против хода движения, слева по ходу движения и справа по ходу движения. Кроме того, датчик 66 рулевого управления снабжает ЭМУ 16 сигналом, соизмеримым с углом поворота и направлением поворота рулевого управления, которым управляет водитель.
ЭМУ 16 определяет скорость каждого из колес FR, FL, RR, RL, а также определяет скорость кузова транспортного средства, на основе выходных данных датчиков 60 скорости колеса. Кроме того, ЭМУ 16 определяет фактический размер отклонения от курса кузова транспортного средства на основе выходных данных датчика 62 размера отклонения от курса и определяет ускорения кузова транспортного средства в направлениях: по ходу движения, против хода движения, слева по ходу движения и справа по ходу движения, на основе выходных данных датчика 64 ускорения, и определяет угол поворота и направление поворота рулевого управления на основе выходных данных датчика 66 рулевого управления.
Далее будет описана работа тормозной/приводной системы согласно варианту осуществления изобретения.
В тормозной/приводной системе варианта осуществления, во время движения транспортного средства, ЭМУ 16 вычисляет, на основе положения педали газа, приводные моменты, которыми колеса FR, FL, RR, RL индивидуально приводятся в действие, и управляет электродвигателями 12 колес FR, FL, RR, RL так, что каждому колесу передается соответствующий один из вычисленных приводных моментов. В этом случае, электроэнергия передается из установленного на транспортном средстве аккумулятора 14 электродвигателям 12 колес FR, FL, RR, RL так, что приводные моменты передаются колесам FR, FL, RR, RL. Следовательно, колеса FR, FL, RR, RL приводятся в действие электродвигателями 12, работающими в качестве источников приводной силы.
Кроме того, ЭМУ 16 определяет, происходит ли или нет проскальзывание колеса, что касается каждого из колес FR, FL, RR, RL, из-за приложения приводных моментов, вычисленных как описано выше. В случае, когда имеет место проскальзывание, ЭМУ 16 выполняет управляющую функцию для устранения проскальзывания (TCS управление). В частности, в случае, когда происходит проскальзывание на любом из колес FR, FL, RR, RL, из-за приложения приводного момента к этому колесу, ЭМУ 16 снижает приводной момент, приложенный к колесу посредством соответствующего электродвигателя 12 так, чтобы устранить проскальзывание. Когда снижается приводной момент, приложенный посредством электродвигателя 12, меняется привод только колеса, соответствующего электродвигателя 12, так чтобы устранить проскальзывание. Следовательно, даже если на любом из колес FR, FL, RR, RL, приложенным к нему приводным моментом вызвано проскальзывание, проскальзывание колеса может быть устранено путем снижения только приводного момента, который приложен к этому колесу.
Кроме того, во время штатного торможения транспортного средства ЭМУ 16 открывает главный клапан 36 отсечки и закрывает как линейный клапан 42, повышающий давления, так и линейный клапан 50, понижающий давление (состояние показано на Фиг.1). В этом случае, колесные цилиндры 26 колес FR, FL, RR, RL связываются с главным цилиндром 24 через трубопровод 34 связи так, что давление колесного цилиндра, равное давлению главного цилиндра 24, передается к каждому колесному цилиндру 26. Следовательно, во время штатного торможения транспортного средства каждое из колес FR, FL, RR, RL может создать тормозной момент от трения, соизмеримый с выжимом педали 20 тормоза, посредством механизма 18 управления трением. Между прочим, в это время давления в колесных цилиндрах колес FR, FL, RR, RL равны друг другу.
Кроме того, ЭМУ 16 оценивает намерение водителя произвести экстренное торможение на основе скорости процесса выжимания педали 20 тормоза. Если намерение расценено как намерение произвести экстренное торможение, ЭМУ 16 увеличивает пропорцию усиления усилителя 22. В этом случае, каждый колесный цилиндр 26 обеспечивается большим давлением колесных цилиндров, нежели во время штатного торможения. Следовательно, во время экстренного торможения транспортного средства, механизм 18 управления трением имеет возможность вызвать создание колесами FR, FL, RR, RL большого тормозного момента от трения, соизмеримого с выжимом педали 20 тормоза и вспомогательной силой. Между прочим, в это время, давления в колесных цилиндрах колес FR, FL, RR, RL равны друг другу.
Кроме того, ЭМУ 16 определяет, происходит ли или нет скольжение, что касается каждого из колес FR, FL, RR, RL, из-за приложения механизмом 18 управления трением тормозного момента от трения. В этом случае, когда имеет место быть скольжение, ЭМУ 16 выполняет управляющую функцию для устранения скольжения (ABS управление). В частности, в случае, когда происходит скольжение любого из колес FR, FL, RR, RL, из-за приложения одинаковых тормозных моментов от трения, ЭМУ 16 приводит в действие электродвигатель 12 этого колеса, так что скольжение устраняется. В этом случае, приводной момент прикладывается к этому колесу посредством подачи электроэнергии от установленного на автомобили аккумулятора 14 к электродвигателю 12, то есть потреблением электроэнергии установленного на транспортном средстве аккумулятора 14. Следовательно, даже если приложением тормозного момента от трения было вызвано скольжение любого из колес FR, FL, RR, RL, скольжение может быть устранено приложением приводного момента к этому колесу от соответствующего электродвигателя 12.
Фиг. 2 показывает блок-схему примера программы управления, согласно которой ЭМУ 16 в устройстве управления поведением транспортного средства выполняет VSC управление. Фиг. 3 является схемой, иллюстрирующей, каким образом приводной момент или рекуперативный тормозной момент, от электродвигателя 12, меняется и устанавливается в соответствии с переключением между двумя уровнями тормозного момента от трения, от механизма 18 управления трением, который установлен с соблюдением требуемых моментов, которые требуются на колесах FR, FL, RR, RL во время выполнения VSC управления. Фиг. 4A и 4B являются схемами для объяснения того, что в устройстве управления поведением транспортного средства варианта осуществления, распределение между приводным моментом или рекуперативным тормозным моментом, от электродвигателя колеса, и тормозного момента от трения, от механизма 18 торможения трением, которые установлены с соблюдением требуемых моментов, которые требуются от колес FR, FL, RR, RL во время выполнения VSC управления, изменяется в соответствии с величиной оставшегося заряда в установленном на транспортном средстве аккумуляторе 14. Между прочим, Фиг. 4A и 4B иллюстрируют случай, относящийся только к передним колесам FR, FL.
Более того, в устройстве управления поведением транспортного средства варианта осуществления, ЭМУ 16 выполняет определение, относящееся к поведению транспортного средства (поведение при движении в повороте или тенденции во время торможения при движении по прямой), используя выходные данные датчиков 60 скорости колеса, датчика 62 отклонения от курса, датчика 64 ускорения и датчика 66 рулевого управления. В случае, когда поведение транспортного средства нестабильно, ЭМУ 16 выполняет управление для стабилизации поведения транспортного средства (VSC управление).
В частности, во-первых, ЭМУ 16 вычисляет, например, угол увода и угловую скорость увода кузова транспортного средства на основе фактического размера отклонения от курса посредством датчика 62 отклонения от курса и ускорений, по, против, слева и справа по ходу движения, посредством датчика 64 ускорения, и определяет наличие/отсутствие тенденции к скольжению заднего колеса кузова транспортного средства на основе результатов вычисления. Кроме того, ЭМУ 16 вычисляет размер отклонения от курса кузова транспортного средства, который используется в качестве целевого значения, на основе угла поворота рулевого управления, посредством датчика 66 рулевого управления, и скорости кузова транспортного средства, посредством датчиков 60 скорости колес, и затем определяет наличие/отсутствие тенденции к скольжению переднего колеса кузова транспортного средства на основе целевого размера отклонения от курса и фактического размера отклонения от курса посредством датчика 62 размера отклонения от курса. На основе наличия/отсутствия тенденции к скольжению задних колес и передних колес кузова транспортного средства, ЭМУ 16 определяет, удовлетворяются ли или нет условия для выполнения VSC управления (этап 100). В частности, если угол увода кузова транспортного средства большой и угловая скорость увода большая, ЭМУ 16 определяет, что кузов транспортного средства имеет тенденцию к скольжению заднего колеса, и, следовательно, условия выполнения VSC управления удовлетворены. Если фактический размер отклонения от курса меньше целевого размера отклонения от курса, ЭМУ 16 определяет, что кузов транспортного средства имеет тенденцию к скольжению переднего колеса, и, следовательно, что условия выполнения VSC управления удовлетворены.
В случае, когда было определено, что условия выполнения VSC управления удовлетворены, ЭМУ 16 вычисляет требуемые моменты, которые необходимо создать колесами FR, FL, RR, RL для того, чтобы исключить нестабильность, на основе тенденции нестабильного поведения транспортного средства (этап 102). Например, в случае, когда определено, что кузов транспортного средства имеет тенденцию к скольжению заднего колеса, ЭМУ 16 вычисляет, на основе угла увода кузова транспортного средства и угловой скорости увода кузова транспортного средства, требуемые тормозные моменты, которые должны быть созданы передними и задними колесами наружной стороны во время движения в повороте, так чтобы создать момент вокруг центра тяжести транспортного средства, который ограничит тенденцию к скольжению заднего колеса, в соответствии со степенью тенденции к скольжению заднего колеса. Кроме того, в случае, когда определено, что кузов транспортного средства имеет тенденцию к скольжению переднего колеса, ЭМУ 16 вычисляет, на основе разности между образцовым размером отклонения от курса и фактическим размером отклонения от курса, требуемые моменты (требуемые тормозные моменты или требуемые приводные моменты), которые должны быть созданы передними и задними колесами, так чтобы создать момент вокруг центра тяжести транспортного средства, который ограничит тенденцию к скольжению переднего колеса в соответствии со степенью тенденции к скольжению переднего колеса.
В тормозной/приводной системе этого варианта осуществления тормозной момент каждого из колес FR, FL, RR, RL создается, используя, по меньшей мере, один механизм 18 управления трением, который создает одинаковые тормозные моменты от трения на всех колесах, и соответствующий один из электродвигателей 12, которые создают рекуперативные тормозные моменты на их соответствующих колесах независимо друг от друга. Кроме того, используя электродвигатели 12, создаются приводящие моменты колес FR, FL, RR, RL. Следовательно, для того чтобы вызвать создание каждым из колес FR, FL, RR, RL требуемого момента, который рассчитан как описывалось выше, необходимо установить распределение между тормозным моментом от трения, от механизма 18 управления трением, и рекуперативным моментом или приводным моментом, от соответствующего электродвигателя 12.
В случае, когда во время выполнения VSC управления, тормозной момент от трения, который механизм 18 управления трением вызывает создание колесами FR, FL, RR, RL, всегда постоянный или изменяется, в соответствии с регулированием давления, выполняемым линейными клапанами 42, 50, иногда происходит, что рекуперативный тормозной момент, создаваемый на колесе FR, FL, RR, RL его соответствующим электродвигателем 12, который установлен, соблюдая требуемый момент колеса, становится относительно большим, так как требуемый момент любого из колес FR, FL, RR, RL может время от времени меняться более быстро, чем возможная скорость регулирования давления линейными клапанами 42, 50. Когда величина оставшегося заряда, установленного на транспортном средстве аккумулятора 14, мала, создание больших рекуперативных тормозных моментов не вызывает неудобство, так как рекуперативная электроэнергия, созданная посредством создания больших рекуперативных тормозных моментов, может быть возвращена в установленный на транспортном средстве аккумулятор 14. Несмотря на это, когда величина оставшегося заряда установленного на транспортном средстве аккумулятора 14 является большой, или установленный на транспортном средстве аккумулятор 14 находится в полностью заряженном состоянии, создание больших рекуперативных тормозных моментов вызывает неудобство, связанное с тем, что рекуперативная электроэнергия не может быть возвращена в установленный на транспортном средстве аккумулятор 14.
В целях исключить это неудобство, можно использовать механизм управления трением, способный вызывать генерирование колесами FR, FL, RR, RL тормозных моментов от трения, отличающихся друг от друга. Более того, в системах, в которых такой механизм управления трением не предоставлен, можно отключить выполнение VSC управления, когда установленный на транспортном средстве аккумулятор 14 находится в полностью заряженном состоянии или в состоянии, близком к полностью заряженному. Несмотря на это, формальная методика требует увеличенных и усложненных конструкций для индивидуальных колес FR, FL, RR, RL в тормозной/приводной системе. Последняя методика вызывает событие, при котором выполнение VSC управления ограничено, когда величина оставшегося заряда, установленного на транспортном средстве аккумулятора 14, является большой.
В случае, когда требуемый момент, который одному из колес FR, FL, RR, RL требуется создать, показан на Фиг.3, когда значение распределения тормозного момента от трения от механизма 18 управления трением является относительно низким (как показано штрихпунктирной линией с двумя точками), размер распределения рекуперативного тормозного момента от электродвигателя 12 становится значительно высоким и, следовательно, рекуперативная электроэнергия, возвращаемая в установленный на транспортном средстве аккумулятор 14, становится большой, или размер распределения приводного момента от электрического двигателя 12 становится значительно ниже и, следовательно, отбираемая электроэнергия из установленного на транспортном средстве аккумулятора 14 становится малой. С другой стороны, когда размер распределения тормозного момента от трения от механизма 18 управления трением относительно является большим (как показано штрихпунктирной линией), размер распределения рекуперативного тормозного момента от электродвигателя 12 становится значительно меньше и, следовательно, рекуперативная электроэнергия, возвращаемая в установленный на транспортном средстве аккумулятор 14 становится малой, или размер распределения приводного момента от электродвигателя 12 становится значительно больше и, следовательно, электроэнергия, отбираемая из установленного на транспортном средстве аккумуляторе 14, увеличивается.
Тогда, в случае, когда размер распределения рекуперативного тормозного момента, от электродвигателя 12 каждого из колес FR, FL, RR, RL, относительно является низким, или размер распределения приводного момента от электродвигателя 12 одного из них является относительно высоким, если общее значение момента, полученное суммированием рекуперативных тормозных моментов и приводных моментов, которые установлены для индивидуальных электродвигателей 12 колес FR, FL, RR, RL, находится в аспекте приводного момента (аспект, когда потребляется электроэнергия), электроэнергия, передаваемая от установленного на транспортном средстве аккумулятора 14 к электродвигателям 12 и потребляемая ими, превышает рекуперативную электроэнергию, возвращаемую от электродвигателей 12 в установленный на транспортном средстве аккумулятор 14, так что общая величина W потребляемой/принимаемой электроэнергии между установленным на транспортном средстве аккумулятором 14 и всеми электродвигателями 12 находится в аспекте потребления электроэнергии (см. следующее Уравнение (1)).

 (1),
(1),
где W - величина регенерированной электроэнергии, с ее положительным знаком, означающим аспект рекуперации электроэнергии, и отрицательным знаком, означающим аспект потребления электроэнергии. Кроме того, в вышеописанном уравнении, T - тормозной момент, с его положительным знаком, означающим аспект тормозного момента, и его отрицательным знаком, означающим аспект приводного момента. Далее, ω - скорость вращения каждого из колес FR, FL, RR, RL.
Следовательно, если распределение между тормозным моментом от трения, от механизма 18 управления трением, и рекуперативным тормозным моментом или приводным моментом, от электродвигателей 12, изменено в соответствии с величиной оставшегося заряда установленного на транспортном средстве аккумулятора 14, становится ненужным предоставлять механизм управления трением, который вызывает создание колесами FR, FL, RR, RL тормозных моментов от трения, отличающихся друг от друга, и, в то же время, можно соответственно выполнить VSC управление даже тогда, когда установленный на транспортном средстве аккумулятор 14 находится в полностью заряженном состоянии или в состоянии, близком к полностью заряженному.
Обращаясь назад к Фиг. 2, в этом варианте осуществления, после вычисления требуемого момента для каждого из колес FR, FL, RR, RL, посредством выполнения VSC управления, ЭМУ 16 измеряет величину оставшегося заряда установленного на транспортном средстве аккумулятора 14 на основании выходных данных датчика 17 состояния аккумулятора (этап 104). Затем, ЭМУ 16 изменяет, в соответствии с величиной оставшегося заряда установленного на транспортном средстве аккумулятора 14, распределение между тормозным моментом от трения, от механизма 18 управления трением, и рекуперативным тормозным моментом или приводным моментом, от каждого электродвигателя 12, которые установлены согласно требуемому моменту, вычисленному в отношении соответствующего каждого из колес FR, FL, RR, RL (этап 106).
В частности, согласно требуемым моментам, вычисленным для каждого из колес FR, FL, RR, RL, чем меньше величина оставшегося заряда установленного на транспортном средстве аккумулятора 14, тем ниже делается размер распределения тормозного момента от трения, от механизма 18 управления трением, и тем выше делается размер распределения рекуперативного тормозного момента, от электродвигателя 12, или делается ниже размер распределения приводного момента, от электродвигателя 12, как показано на Фиг. 4(A). Затем, как показано на Фиг. 4(B), чем выше величина оставшегося заряда установленного на транспортном средстве аккумулятора 14, тем выше делается размер распределения тормозного момента от трения, от механизма 18 управления трением, и тем ниже делается размер распределения рекуперативного тормозного момента, от электродвигателя 12, или делается выше размер распределения приводного момента от электродвигателя 12.
Когда установленный на транспортном средстве аккумулятор 14 находится, по меньшей мере, в полностью заряженном состоянии, распределение между тормозным моментом от трения, от механизма 18 управления трением, и рекуперативным тормозным моментом или приводным моментом, от электродвигателя 12, установлено так, что общее значение, полученное суммированием значений момента, установленных отдельно для индивидуальных электродвигателей 12 колес FR, FL, RR, RL, находится в аспекте приводного момента (аспект, в котором электроэнергия потребляется), то есть, по меньшей мере, электродвигатель 12 одного из колес вызывает создание колесом приводного момента.
Затем, ЭМУ 16 вызывает создание, в соответствии с одной из установленных пропорций распределения, на каждом из колес FR, FL, RR, RL, тормозного момента от трения и рекуперативного тормозного момента или приводного момента (этап 108). В частности, ЭМУ 16 закрывает главный клапан отсечки и приводит в действие мотор 48 насоса и открывает линейный клапан 42 увеличения давления или линейный клапан 50 понижения давления так, что установленный тормозной момент от трения прикладывается одинаково к колесам FR, FL, RR, RL. В этом случае, тормозной момент от трения, регулируемый работой насоса 44 и линейных клапанов 42, 50, прикладывается одинаково к колесам FR, FL, RR, RL. Кроме того, ЭМУ 16 приводит в действие электродвигатели 12 так, что электродвигатель 12, каждого из колес FR, FL, RR, RL, создает установленный рекуперативный тормозной момент на этом колесе или прикладывает установленный приводной момент к этому колесу. В этом случае, рекуперативная электроэнергия передается от электродвигателей 12 к установленному на транспортном средстве аккумулятору 14, вызывая создание одним или более электродвигателями 12 установленных рекуперативных тормозных моментов в соответствующих одном или более из колес FR, FL, RR, RL, или, к одному или более из колес FR, FL, RR, RL, прикладывается, посредством передачи электричества от установленного на транспортном средстве аккумулятора 14 к соответствующим одному или более из электродвигателей 12, установленный приводной момент.
Таким образом, в устройстве управления поведением транспортного средства согласно варианту его осуществления, тормозные моменты, необходимые для выполнения VSC управления, создаются на колесах FR, FL, RR, RL независимо друг от друга. Эта конструкция может быть реализована путем установки соответствующей пропорции распределения между тормозным моментом от трения, от механизма 18 управления трением, который способен прикладывать одинаковые моменты к колесам, и рекуперативным тормозным моментом или приводным моментом, от каждого из электродвигателей 12, которые способны прикладывать моменты к соответствующим колесам независимо друг от друга.
То есть во время VSC управления, с соблюдением требуемых моментов, которые требуется создать индивидуальным колесам FR, FL, RR, RL, тормозные моменты от трения, от механизма 18 управления трением, установлены как одинаковые значения для всех колес, а для индивидуальных электродвигателей 12 колес, рекуперативный тормозной момент или приводной момент, установлены в значения моментов, которые независимы друг от друга.
В этой конструкции можно прикладывать рекуперативные тормозные моменты или приводные моменты отдельно к каждому из колес FR, FL, RR, RL посредством электродвигателей, при этом прикладывая одинаковые тормозные моменты от трения к колесам FR, FL, RR, RL, так что колеса FR, FL, RR, RL могут быть соответственно обеспечены их соответствующими требуемыми моментами. Следовательно, в соответствии с этим вариантом осуществления, нет необходимости предоставлять механизм управления трением, который способен делать тормозные моменты от трения, создаваемые на колесах FR, FL, RR, RL отличными друг от друга.
Кроме того, в устройстве управления поведением транспортного средства этого варианта осуществления, во время выполнения VSC управления, изменяется, в соответствии с величиной оставшегося заряда, установленного на транспортном средстве аккумулятора 14, распределение между установленными согласно требуемому моменту каждого из колес FR, FL, RR, RL тормозным моментов от трения, от механизма 18 управления трением, и рекуперативным тормозным моментом или приводным моментом, от каждого электродвигателя 12. В частности, чем больше величина оставшегося заряда, тем больше становится размер распределения тормозного момента от трения, от механизма 18 управления трением, и тем ниже становится размер распределения рекуперативного тормозного момента, от каждого электродвигателя 12, или тем выше становится размер распределения приводного момента, от каждого электродвигателя 12. Затем, в частности, по меньшей мере, во время полностью заряженного состояния установленного на транспортном средстве аккумулятора 14, распределение между соответствующими размерами, установлено так, что общее значение момента, полученное суммированием значений момента, предоставленных электродвигателями 12 колес FR, FL, RR, RL, находится в аспекте приводного момента.
В вышеупомянутой конструкции, даже когда установленный на транспортном средстве аккумулятор 14 находится в полностью заряженном состоянии или в состоянии около полностью заряженного состояния, можно приводить в движение электродвигатели 12 всех колес FR, FL, RR, RL, находясь в общем в аспекте потребления электроэнергии, в то же время предоставляя требуемые моменты, которые требуются индивидуально от колес FR, FL, RR, RL. В этом случае, не возникает событие, когда рекуперативная электроэнергия возвращается обратно в установленный на транспортном средстве аккумулятор 14, и электроэнергия установленного на транспортном средстве аккумулятора 14 может расходоваться. Следовательно, даже когда величина оставшегося заряда установленного на транспортном средстве аккумулятора 14 является большой, требуемые моменты могут быть приложены к колесам FR, FL, RR, RL, используя электродвигатели 12, расположенные в колесах FR, FL, RR, RL.
Следовательно, в соответствии с устройством управления поведением транспортного средства этого варианта осуществления, можно соответственно приложить требуемые моменты индивидуально к колесам FR, FL, RR, RL, используя электродвигатели 12, расположенные в колесах FR, FL, RR, RL, и выполнять VSC управление даже во время полностью заряженного состояния установленного на транспортном средстве аккумулятора 14, без необходимости предоставить механизм управления трением, способный делать тормозные моменты от трения, создаваемые на колесах FR, FL, RR, RL, отличными друг от друга. То есть для того, чтобы соответственно выполнить VSC управление, достаточно независимо друг от друга управлять электродвигателями колес FR, FL, RR, RL, и нет необходимости предоставлять механизм управления трением, который способен делать тормозные моменты от трения, создаваемые на колесах FR, FL, RR, RL, отличными друг от друга. Более того, VSC управление, используя электродвигатели 12, может быть надежно выполнено без остановки VSC управления во время полностью заряженного состояния установленного на транспортном средстве аккумулятора 14.
В вышеописанном варианте осуществления линейный клапан 42 увеличения давления и линейный клапан 50 понижения давления представляют собой «линейные клапаны». ЭМУ 16 реализует «средство вычисления требуемого момента» посредством выполнения процесса этапа 102 в программе, показанной на Фиг. 2, реализует «средство установки значения момента» посредством выполнения процессов на этапах 104, 106, реализует «средство измерения величины оставшегося заряда» посредством выполнения процессов этапа 104, и реализует «средство изменения распределения момента» посредством выполнения процесса этапа 106.
Несмотря на то, что в вышеописанном варианте осуществления все колеса FR, FL, RR, RL транспортного средства приводятся и тормозятся посредством их соответствующих электродвигателей 12, также допустимо принять конструкцию, в которой только передние колеса FR, FL или только задние колеса RR, RL приводятся и тормозятся электродвигателями. В этой конструкции становится ненужным предоставлять механизм управления трением, который способен делать тормозные моменты от трения только передних колес или только задних колес отличными друг от друга.
Кроме того, в вышеупомянутом варианте осуществления, во время выполнения VSC управления, распределение между тормозным моментом от трения, от механизма 18 управления трением, и рекуперативным тормозным моментом или приводным моментом, от электродвигателя 12, которые установлены с соблюдением требуемого момента соответствующего одного из колес FR, FL, RR, RL, изменяется в соответствии с величиной оставшегося заряда установленного на транспортном средстве аккумулятора 14 по такому принципу, что чем выше величина оставшегося заряда, тем выше делается размер распределения тормозного момента от трения, от механизма 18, и тем ниже делается размер распределения рекуперативного тормозного момента, от электродвигателя 12, или тем выше делается размер распределения приводного момента, от этого же электродвигателя. Несмотря на это, изобретение не ограничено такими конструкциями, в которых распределение изменяется линейно, но и распределение также может быть изменено, по меньшей мере, двумя уровнями, в соответствии с величиной оставшегося заряда аккумулятора. Однако, в этом случае, также, когда величина оставшегося заряда установленного на транспортном средстве аккумулятора 14 находится, по меньшей мере, в полностью заряженном состоянии, распределение между тормозным моментом от трения, от механизма 18 управления трением, и рекуперативным тормозным моментом или приводным моментом, от электродвигателя 12, установлено так, что общее значение момента, полученное суммированием значений момента, установленного отдельно для каждого из электродвигателей 12 колес FR, FL, RR, RL, находится в аспекте приводного момента (аспект, при котором потребляется электроэнергия).
В то время как изобретение было описано со ссылкой на то, что рассматривается в качестве его предпочтительных вариантов осуществления, должно быть понятно, что изобретение не ограничивается раскрытыми вариантами осуществления или конструкциями. Напротив, изобретение подразумевает различные модификации и эквивалентные компоновки. Кроме того, хотя различные элементы изобретения показаны в различных комбинациях и конфигурациях, которые являются характерными, в объем прилагаемой формулы изобретения попадают и другие комбинации и конфигурации, включающие в себя больше, меньше или только один из описанных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНЫМ/ТЯГОВЫМ УСИЛИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2372227C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С НЕЗАВИСИМЫМ ПРИВОДОМ МОДУЛЕЙ КОЛЕС | 2006 |
|
RU2389617C2 |
| ТОРМОЗНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2456183C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2405693C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2405692C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОЙ ТОРМОЖЕНИЯ/ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2357882C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НЕОБХОДИМОЙ СТЕПЕНИ ЗАРЯЖЕННОСТИ ДЛЯ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ | 2012 |
|
RU2607469C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГАШЕНИЕМ КОЛЕБАНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2412839C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2670503C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657658C1 |
Группа изобретений относится к устройству управления поведением транспортного средства и к способу управления поведением транспортного средства. Устройство содержит средство вычисления требуемых моментов для генерирования колесам, средство установки значений первого момента и второго момента. Значение первого момента составлено из тормозного момента от трения, который генерирует колесо посредством средства управления трением. Значение второго момента составлено из приводного момента и рекуперативного тормозного момента, которые генерирует колесо посредством одного из электродвигателей. Способ заключается в том, что вычисляют требуемые моменты для генерирования колесам и устанавливают значения первого момента и значение второго момента. Технический результат заключается в обеспечении управления поведением транспортного средства путем использования электродвигателей каждого колеса. 2 н. и 13 з.п. ф-лы, 5 ил.
1. Устройство управления поведением транспортного средства, которое содержит установленный на транспортном средстве аккумулятор (14), на который и с которого производится зарядка и разрядка электроэнергии, электродвигатели (12), расположенные индивидуально для множества колес транспортного средства и прикладывающие приводной момент к соответствующим одним из колес при приложении к ним электроэнергии от установленного на транспортном средстве аккумулятора (14) или передающие рекуперативную электроэнергию к установленному на транспортном средстве аккумулятору (14) от соответствующих одних из колес, генерирующих рекуперативный тормозной момент, и средство (18) управления трением для генерирования колесами тормозного момента от трения, и которое управляет поведением транспортного средства посредством создания тормозных/приводных усилий, прикладываемых индивидуально к колесам, отличных друг от друга, отличающееся тем, что оно содержит средство вычисления требуемого момента для вычисления, основываясь на поведении транспортного средства, требуемых моментов, которые требуется индивидуально генерировать колесам, и средство установки значения момента для установки согласно требуемому моменту каждого колеса, вычисленному средством вычисления требуемого момента, значения первого момента, предоставляемого одинаково для всех колес, которое составлено из тормозного момента от трения, который генерирует колесо посредством средства (18) управления трением, и значения второго момента, предоставляемого для каждого колеса независимо друг от друга, которое составлено из, по меньшей мере, одного из приводного момента и рекуперативного тормозного момента, которые генерирует колесо посредством соответствующего одного из электродвигателей.
2. Устройство по п.1, отличающееся тем, что средство установки значения момента содержит средство измерения величины оставшегося заряда для измерения величины оставшегося заряда установленного на транспортном средстве аккумулятора (14) и средство изменения распределения момента для изменения распределения между значением первого момента и значением второго момента в соответствии с величиной оставшегося заряда, измеренной средством измерения величины оставшегося заряда.
3. Устройство по п.2, отличающееся тем, что средство изменения распределения момента увеличивает размер распределения значения первого момента для величины оставшегося заряда, которое является относительно большим.
4. Устройство по п.3, отличающееся тем, что средство изменения распределения момента увеличивает размер распределения значения второго момента, составленного из приводного момента, если размер распределения значения первого момента увеличен.
5. Устройство по п.3, отличающееся тем, что средство изменения распределения момента уменьшает размер распределения значения второго момента, составленного из рекуперативного тормозного момента, если размер распределения значения первого момента увеличен.
6. Устройство по п.4, отличающееся тем, что средство изменения распределения момента уменьшает размер распределения значения второго момента, составленного из рекуперативного тормозного момента, если размер распределения значения первого момента увеличен.
7. Устройство по п.3, отличающееся тем, что в промежутке времени, во время которого величина оставшегося заряда находится, по меньшей мере, в полностью заряженном состоянии, средство изменения распределения момента изменяет распределение между значением первого момента и значением второго момента так, что суммарное значение значений второго момента в этом промежутке времени находится в аспекте приводного момента.
8. Устройство по любому из пп.1-7, отличающееся тем, что средство (18) управления трением является механизмом управления трением, который одновременно прикладывает одинаковые тормозные моменты от трения к, по меньшей мере, двум колесам.
9. Устройство по п.8, отличающееся тем, что механизм управления трением содержит главный цилиндр (24), который подключает к средству работы тормоза колесный цилиндр (26), который выполнен отдельно для каждого колеса и который взаимодействует с главным цилиндром (24) посредством трубопровода сообщения так, чтобы приложить тормозной момент от трения к колесам; насос (44), нагнетающий тормозную текучую среду под высоким давлением, и линейный клапан (42), который регулирует давление тормозной текучей среды в каждом колесном цилиндре, которая подается с нагнетающей стороны насоса (44) и выпускается в накопительный бак (32).
10. Устройство по п.1, отличающееся тем, что средство вычисления требуемого момента вычисляет, основываясь на разнице величины целевого отклонения от курса и величины фактического отклонения от курса транспортного средства, требуемый момент, который необходимо создать отдельно для каждого колеса так, чтобы стабилизировать поведение транспортного средства при движении в повороте.
11. Устройство по п.1, отличающееся тем, что средство вычисления требуемого момента вычисляет, основываясь на разнице величины целевого отклонения от курса и величины фактического отклонения от курса и ускорения транспортного средства, требуемый момент, который необходимо создать отдельно для каждого колеса так, чтобы стабилизировать поведение транспортного средства при движении в повороте.
12. Устройство по п.1, отличающееся тем, что средство вычисления требуемого момента определяет в отношении каждого колеса, происходит ли или нет проскальзывание колеса, вызванное приложением приводного момента, и вычисляет отдельно для каждого колеса требуемый момент, который необходимо создать так, чтобы удержать каждое колесо от пробуксовки во время ускорения, на основе результата определения, относящегося к проскальзыванию колеса.
13. Устройство по п.1, отличающееся тем, что средство вычисления требуемого момента определяет в отношении каждого из колес происходит ли или нет скольжение колеса, вызванное приложением тормозного момента от трения, и вычисляет отдельно для каждого колеса требуемый момент, который необходимо создать так, чтобы удержать каждое колесо от блокировки во время торможения, на основе результата определения, относящегося к скольжению колеса.
14. Способ управления поведением транспортного средства, которое содержит установленный на транспортном средстве аккумулятор (14), на который и с которого производится зарядка и разрядка электроэнергии; электродвигатели (12), расположенные индивидуально для множества колес транспортного средства и прикладывающие приводной момент к соответствующим одним из колес при приложении к ним электроэнергии от установленного на транспортном средстве аккумулятора (14) или передающие рекуперативную электроэнергию к установленному на транспортном средстве аккумулятору (14) от соответствующих одних из колес, генерирующих рекуперативный тормозной момент, и средство (18) управления трением для генерирования колесами тормозного момента от трения, и которое управляет поведением транспортного средства посредством создания тормозных/приводных усилий, прикладываемых индивидуально к колесам, отличных друг от друга, отличающийся тем, что вычисляют, основываясь на поведении транспортного средства, требуемые моменты, которые требуется генерировать колесам, и устанавливают согласно вычисленному требуемому моменту значение первого момента, которое составлено из тормозного момента от трения, который одинаково генерирует каждое колесо посредством средства управления трением, и значение второго момента, которое составлено из, по меньшей мере, одного из приводного момента и рекуперативного тормозного момента, которые независимо генерирует каждое колесо посредством соответствующего одного из электродвигателей (12).
15. Способ по п.14, отличающийся тем, что дополнительно измеряют величину оставшегося заряда установленного на транспортном средстве аккумулятора (14) и изменяют распределение между значением первого момента и значением второго момента в соответствии с величиной оставшегося заряда.
| JP 2006034053 А, 02.02.2006 | |||
| JP 2006025485 А, 26.01.2006 | |||
| JP 2006238528 А, 07.09.2006 | |||
| US 2004176899 А1, 09.09.2004 | |||
| US 2003230933 A1, 18.12.2003 | |||
| Центрифуга | 1988 |
|
SU1555184A1 |
| WO 2004080774 A1, 23.09.2004 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ЭЛЕКТРОПРИВОДОМ (ВАРИАНТЫ) | 2000 |
|
RU2192974C2 |

