Изобретение относится к медицине и лечебной физкультуре, а более конкретно к устройствам для осуществления механотерапии, и может быть использовано для профилактики и лечения заболеваний позвоночника путем разработки движений сгибания и разгибания в поясничном отделе.
Установление предшествующего уровня техники.
На основе анализа материалов фонда патентной и другой медико-технической и научно-технической литературы заявителем установлено следующее.
Механотерапия (кинезитерапия) - метод лечения физическими упражнениями на специальных аппаратах. Часто применяется в сочетании с лечебной гимнастикой при контрактурах, тугоподвижности суставов и т.п. [1]. Механотерапия включает в себя все формы лечения движением, способствует восстановлению у больного имеющихся у него двигательных расстройств.
Известны устройства для механотерапии суставов [2, 3], содержащие кушетку, состоящую из неподвижной и подвижной секций, которые связаны между собой шарнирно и обеспечивают фиксацию сегментов конечностей. Подвижная секция кушетки соединена с электроприводом, двигатель которого подключен к блоку управления. При этом подвижная секция соединена с электроприводом через дополнительную тягу посредством датчика сопротивления движению, а блок управления дополнительно содержит датчик угла, оптимизатор угловой скорости, триггеры Шмидта, задатчики, генератор импульсов и логический блок.
Такие устройства характеризуются сложностью конструкции и не позволяют использовать их для механотерапии позвоночника.
Известно устройство для механотерапии позвоночника [4], содержащее две П-образные стойки, установленную в них раму, пластину для размещения пациента и упоры. При этом рама установлена в стойках с возможностью поворота, упоры закреплены в П-образных стойках. Данное устройство обеспечивает условия для динамического изменения углов между звеньями позвоночника при его сгибании и разгибании в переднезаднем направлениях одновременно в положении лежа в пассивном режиме работы мышц туловища.
Однако оно также характеризуется сложностью конструкции.
Известно также устройство для механотерапии позвоночника [5], содержащее основание, кушетку, состоящую из головной и тазовой секций, направляющие, расположенные на основании, причем основание снабжено двумя стойками, соединенными с секциями кушетки посредством двухостных шарниров, и двумя парами механизмов наклона, кинематически связанных с секциями кушетки и расположенных во взаимно перпендикулярных плоскостях, проходящих через оси шарниров.
Такое устройство обеспечивает относительно ускоренные ротационно-флекционные воздействия на позвоночник, уменьшает физические нагрузки на лечащего врача. Однако оно также характеризуется сложностью конструкции.
Известно устройство для механотерапии позвоночника [6], содержащее
основание, выполненное в виде станины,
кушетку, состоящую из грудной и тазовой секций, шарнирно соединенных между собой и с основанием,
электропривод, состоящий из электродвигателя и трансмиссии,
коленчатый вал, на который насажен ролик-эксцентрик,
разрезной обод, взаимодействующий с нижними концами двух толкателей, верхние концы которых шарнирно соединены с грудной и тазовой секциями кушетки,
винтовую стяжку, взаимодействующую с разрезным ободом
и пульт управления электроприводом.
Такое устройство характеризуется следующими недостатками.
В устройстве отсутствует возможность регулировки такого параметра как «уровень зоны колебаний», что снижает его лечебные возможности, а для регулировки такого параметра как «уровень амплитуды колебаний» используется ручной привод, что усложняет труд медработника.
Во время работы грудная и тазовая секции кушетки меняют свое угловое положение. Следовательно, меняется расстояние между поверхностями данных секций, что приводит к скольжению (трению) головы и спины пациента о поверхность кушетки. В результате пациент во время приема процедур испытывает неприятные ощущения.
В устройстве не предусмотрена возможность прогрева спины пациента во время процедур, что снижает эффективность лечебного механического воздействия на его тело.
Кроме того, в устройстве не предусмотрена возможность оперативной (экстренной) остановки устройства.
Характеристика и критика прототипа.
Наиболее близким изобретением к предлагаемому по наибольшему количеству сходных признаков, технической сущности, схемному решению и достигаемому при использовании результату является устройство для механотерапии позвоночника [7].
Такое устройство, выбранное в качестве прототипа, содержит
основание, выполненное в виде горизонтальной рамы с опорами,
кушетку, состоящую из шарнирно соединенных между собой грудной и тазовой секций,
первую вертикальную раму, нижняя часть которой жестко соединена с горизонтальной рамой, а верхняя часть шарнирно соединена с грудной секцией кушетки,
вторую вертикальную раму, нижняя часть которой жестко соединена с горизонтальной рамой, а верхняя часть шарнирно соединена с тазовой секцией кушетки,
электропривод, корпус которого размещен на платформе,
кривошип, насаженный на выходной вал электропривода и шарнирно соединенный с нижним концом толкателя,
ползун, снабженный направляющим для перемещения вдоль грудной секции кушетки и шарнирно соединенный с верхним концом толкателя,
программный блок, выполненный в виде ПЭВМ, и подключенный к нему пульт управления,
при этом платформа выполнена с возможностью перемещения вдоль первой вертикальной рамы.
Примечание. Выделенные здесь признаки прототипа отсутствуют у заявляемого устройства.
Прототип характеризуется следующими недостатками.
1. В устройстве для регулировки таких параметров как «уровень амплитуды колебаний» и «уровень зоны колебаний» используются ручные приводы, что усложняет труд медработника.
2. Кроме того, в таком устройстве пульт управления размещен на платформе под кушеткой.
По этой причине
медработнику приходится постоянно нагибаться к пульту управления, чтобы обеспечить ввод параметров процедуры;
пациент не имеет, при необходимости, возможности самостоятельно управлять работой устройства во время приема процедур.
3. Во время работы грудная и тазовая секции кушетки меняют свое угловое положение. Следовательно, меняется расстояние между поверхностями данных секций, что приводит к скольжению (трению) головы и спины пациента о поверхность кушетки. В ряде случаев происходит даже своеобразный «захват» волос на затылке пациента поверхностью грудной секции. В результате пациент во время приема процедур вынужден испытывать неприятные ощущения.
4. В устройстве не предусмотрена возможность прогрева спины пациента во время процедур, что снижает эффективность лечебного механического воздействия на его тело.
5. В устройстве не предусмотрена возможность оперативной (экстренной) остановки устройства.
Технический результат и его достижение.
Изобретение направлено на достижение следующих технических результатов.
1. Облегчение труда медработника путем замены ручных (механических) приводов регуляторов амплитуды и зоны механических колебаний электроприводами и выполнением пульта управления выносным.
2. Исключение скольжения (трения) головы и спины пациента о поверхность кушетки во время процедур.
3. Повышение эффективность лечебного механического воздействия на тело пациента путем прогрева его спины до и во время процедур.
4. Наличие возможности экстренной остановки устройства во время проведения процедуры.
5. Наличие возможности у пациента, при необходимости, самостоятельно управлять лечебной процедурой.
Достижение указанных технических результатов обеспечивается тем, что известное устройство для механотерапии позвоночника, содержащее:
основание, выполненное в виде горизонтальной рамы с опорами,
кушетку, состоящую из шарнирно соединенных между собой грудной и тазовой секций,
первую вертикальную раму, нижняя часть которой жестко соединена с горизонтальной рамой, а верхняя часть шарнирно соединена с грудной секцией кушетки,
вторую вертикальную раму, верхняя часть которой шарнирно соединена с тазовой секцией кушетки,
первый электропривод, корпус которого размещен на платформе,
кривошип, насаженный на выходной вал первого электропривода и шарнирно соединенный с нижним концом толкателя,
ползун, снабженный направляющим для перемещения вдоль грудной секции кушетки и шарнирно соединенный с верхним концом толкателя,
программный блок и подключенный к нему пульт управления,
содержит также:
второй электропривод, корпус которого шарнирно соединен с грудной секцией кушетки, а выдвижной шток шарнирно соединен с ползуном,
третий электропривод, корпус которого шарнирно соединен с верхней частью первой вертикальной рамы, а его выдвижной шток шарнирно соединен с одним концом платформы, другой конец которого шарнирно соединен с основанием,
при этом первый, второй и третий электроприводы снабжены датчиками положения, а второй и третий электроприводы дополнительно оснащены концевыми выключателями,
входы программного блока подключены к выходам датчиков положения и концевых выключателей, а выходы программного блока - к входам первого, второго и третьего электроприводов,
пульт управления выполнен выносным,
а нижняя часть второй вертикальной рамы шарнирно соединена с горизонтальной рамой.
Кроме того,
- грудная и тазовая секции кушетки снабжены элементами подогрева, подключенными к программному блоку;
- пульт управления снабжен аварийной кнопкой;
- кушетка содержит головную секцию;
- грудная и тазовая секции кушетки выполнены в виде рамок с размещенными на них панелями;
- панель грудной секции выполнена подвижной относительно панели тазовой секции;
- головная секция снабжена панелью, выполненной с возможностью перемещения вдоль панели грудной секции;
- головная и грудная секции кушетки снабжены ограничителями перемещений соответствующих панелей;
- рамка и панель грудной секции, а также панели головной и грудной секции связаны упругим элементом, например пружиной;
- панели секций кушетки обшиты искусственным покрытием, например кожзаменителем, под которым размещен наполнитель, например поролон.
Проверка соответствия указанной совокупности существенных признаков устройства трем условиям (критериям) патентоспособности.
Проверка соответствия заяеляемого устройство условию патентоспособности «новизна».
Для оценки новизны заявляемого технического решения проанализируем вышеприведенную совокупность существенных признаков заявляемого устройства.
Выделим признаки заявляемого устройства, совпадающие с признаками прототипа. Устройство содержит:
основание, выполненное в виде горизонтальной рамы с опорами,
кушетку, состоящую из шарнирно соединенных между собой грудной и тазовой секций,
первую вертикальную раму, нижняя часть которой жестко соединена с горизонтальной рамой, а верхняя часть шарнирно соединена с грудной секцией кушетки,
вторую вертикальную раму, верхняя часть которой шарнирно соединена с тазовой секцией кушетки,
первый электропривод, корпус которого размещен на платформе,
кривошип, насаженный на выходной вал первого электропривода и шарнирно соединенный с нижним концом толкателя,
ползун, снабженный направляющим для перемещения вдоль грудной секции кушетки и шарнирно соединенный с верхним концом толкателя,
программный блок и подключенный к нему пульт управления.
Выделим признаки заявляемого устройства, не совпадающие с признаками прототипа.
Устройство также содержит:
второй электропривод, корпус которого шарнирно соединен с грудной секцией кушетки, а выдвижной шток шарнирно соединен с ползуном,
третий электропривод, корпус которого шарнирно соединен с верхней частью первой вертикальной рамы, а его выдвижной шток шарнирно соединен с одним концом платформы, другой конец которого шарнирно соединен с основанием,
при этом первый, второй и третий электроприводы снабжены датчиками положения, а второй и третий электроприводы дополнительно - концевыми выключателями,
входы программного блока подключены к выходам датчиков положения и концевых выключателей, а выходы программного блока - к входам первого, второго и третьего электроприводов,
пульт управления выполнен выносным,
а нижняя часть второй вертикальной рамы шарнирно соединена с горизонтальной рамой.
Кроме того,
грудная и тазовая секции кушетки снабжены элементами подогрева, подключенными к программному блоку;
пульт управления снабжен аварийной кнопкой;
кушетка содержит головную секцию;
грудная и тазовая секции кушетки выполнены в виде рамок с размещенными на них панелями;
панель грудной секции выполнена подвижной относительно панели тазовой секции;
головная секция снабжена панелью, выполненной с возможностью перемещения вдоль панели грудной секции;
головная и грудная секции кушетки снабжены ограничителями перемещений соответствующих панелей;
рамка и панель грудной секции, а также панели головной и грудной секции связаны упругим элементом, например пружиной;
панели секций кушетки обшиты искусственным покрытием, например кожзаменителем, под которым размещен наполнитель, например поролон.
Наличие указанных отличительных признаков обеспечивает соответствие всей совокупности признаков условию патентоспособности «новизна». При этом не обнаружены устройства, в которых технический результат достигнут аналогичной совокупностью существенных признаков. Проверка соответствия устройства условию патентоспособности «изобретательский уровень».
Для проверки соответствия требованию изобретательского уровня заявителем проведен дополнительный поиск и анализ решений по патентной и другой научно-технической литературе. При этом не выявлены устройства аналогичного назначения с признаками, сходными с отличительными признаками заявленного объекта. Совокупность его признаков не является очевидной из уровня техники, на основании чего был сделан вывод о том, что предлагаемый объект соответствует условию патентоспособности «изобретательский уровень» по действующему законодательству.
При этом следует отметить, что между совокупностью существенных признаков предлагаемого устройства и достигаемыми техническими результатами существует причинно-следственная связь, поскольку указанные технические результаты достигаются лишь при совместном использовании всех без исключения известных и отличительных признаков.
Сущность изобретения.
Сущность изобретения иллюстрируется чертежами,
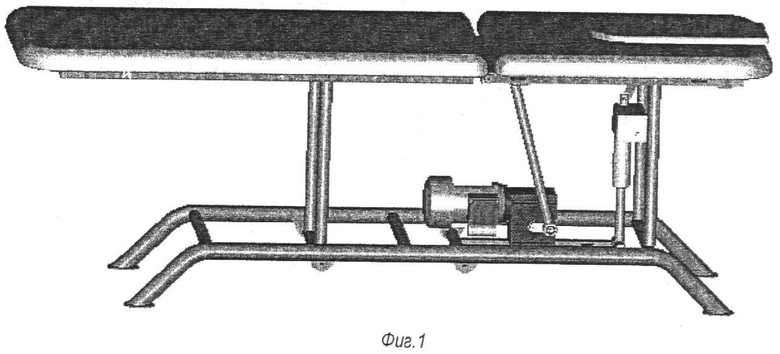
где на фиг.1 показано схематическое изображение внешнего вида заявляемого устройства;
на фиг.2 приведена кинематическая схема устройства (без головной секции);
на фиг.3 и 4 показаны соответственно обобщенная структурная и электрическая схемы устройства;
на фиг.5 показана кинематическая схема головной и грудной секций кушетки;
на фиг.6 показан общий вид кушетки устройства (вид сбоку и сверху).
Фиг.7 поясняет изменение амплитуды колебаний головной секции кушетки при изменении положения ползуна вдоль направляющей.
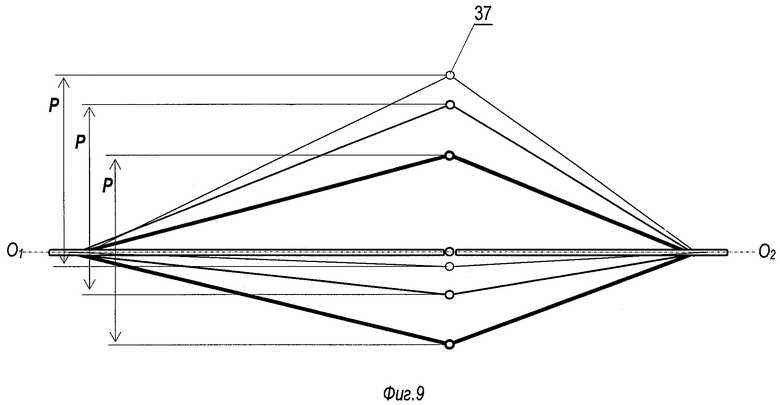
На фиг.8 показаны положения грудной и тазовой секций кушетки при изменении уровня амплитуд колебаний, а на фиг.9 - положения грудной и тазовой секций кушетки при изменении уровня зоны колебаний.
Фиг.10 поясняет изменение расстояния между поверхностями грудной и тазовой секций кушетки во время работы устройства.
Описание конструкции устройства (в статике).
Устройство содержит
основание, выполненное в виде горизонтальной рамы 1 с четырьмя опорами 2 (фиг.2),
кушетку, состоящую из головной 3, грудной 4 и тазовой 5 секций (фиг.6),
первую вертикальную раму 6, нижняя часть которой жестко соединена с горизонтальной рамой 1, а ее верхняя часть через шарниры 7 соединена с грудной секцией 4 кушетки,
вторую вертикальную раму 8, нижняя часть которой через шарниры 9 соединена с горизонтальной рамой 1, а ее верхняя часть через шарниры 10 соединена с тазовой секцией 5 кушетки,
первый электропривод 11, корпус 12 которого размещен на платформе 13,
кривошип 14, насаженный на выходной вал 15 первого электропривода 11 и через шарнир 16 соединенный с нижним концом толкателя 17,
ползун 18, снабженный направляющим 19 для его перемещения вдоль грудной секции 4 кушетки, и через шарнир 20 соединенный с верхним концом толкателя 17,
второй электропривод 21, корпус 22 которого через шарнир 23 соединен с грудной секцией 4 кушетки, а его выдвижной шток 24 через шарнир 25 соединен с ползуном 18,
третий электропривод 26, корпус 27 которого через шарнир 28 соединен с верхней частью первой вертикальной рамы 6, а его выдвижной шток 29 через шарнир 30 соединен с одним концом платформы 13, другой конец которого через шарниры 31 соединен с горизонтальной рамой 1,
программный блок 32 и подключенный к нему выносной пульт 33 (фиг.4).
Электроприводы 11,21 и 26 реализованы на основе электродвигателя и редуктора, кинематически связанного с ротором данного электродвигателя (не показаны).
В электроприводе 11 вращение ротора его электродвигателя преобразуется в соответствующий угол поворота выходного вала 15 и, как следствие, в соответствующее перемещение толкателя 17.
В электроприводах 21 и 26 вращение ротора их электродвигателя преобразуется в соответствующее продольное перемещение штока 24 или 29 («выдвижение» штока из корпуса электропривода, или наоборот, «втягивание» штока в его корпус).
В устройстве все электроприводы 11, 21 и 26 снабжены датчиками 34 положения, а электроприводы 21 и 26 содержат также пары концевых выключателей 35 и 36 (фиг,4). Входы программного блока 32 подключены к выходам соответствующих датчиков 34 положения и концевых выключателей 35 и 36, а выходы программного блока 32 - к входам электроприводов 11, 21 и 26.
Датчики 34 положения реализованы на основе датчика Холла (не показан). У электропривода 11 при каждом обороте его выходного вала 15 на выходе соответствующего датчика Холла формируется импульс, который подсчитывается программным блоком 32. Благодаря этому по количеству подсчитанных импульсов можно судить о промежутке времени, которое прошло с момента начала работы данного электропривода 11.
У электроприводов 21 и 26 при каждом обороте выходного вала редуктора (не показан) на выходе соответствующего датчика Холла формируется импульс, который также подсчитывается программным блоком 32. Благодаря этому по количеству подсчитанных импульсов можно судить о том, насколько «выдвинуты» штоки 24 или 29.
Концевые выключатели 35 формируют на своих выходах импульс в момент, когда шток оказывается полностью «втянутым» в корпус соответствующего электропривода 21 или 26, а концевые выключатели 36 формируют на своих выходах импульс в момент, когда шток оказывается полностью «выдвинутым» из корпуса соответствующего электропривода 21 или 26.
У электропривода 11 электродвигатель, редуктор и датчик 34 положения могут быть выполнены в едином корпусе 12. Возможен вариант, когда датчик 34 выполнен отдельно и кинематически связан с выходным валом 15. В устройстве для механотерапии позвоночника, изготовленном заявителем, электропривод реализован на базе выпускаемого промышленностью электропривода модели Мотор-редуктор ХС40-50-28-В3-0,37-63-380-50(4Р).
У электроприводов 21 и 26 электродвигатель, редуктор, датчик 34 положения и концевые выключатели 35 и 36 также могут быть выполнены в едином корпусе. Например, в устройстве для механотерапии позвоночника, изготовленном заявителем, такие электроприводы реализованы на базе выпускаемого промышленностью электропривода модели Megamat MBZ 6000/150/280.
В описываемом устройстве грудная 4 и тазовая 5 секции кушетки выполнены в виде соединенных между собой через шарниры 37 металлических рамок 38 и 39 с размещенными на них панелями 40 и 41 из фанеры (фиг.6). При этом панель 40 грудной секции 4 выполнена подвижной относительно панели 41 тазовой секции, а головная секция 3 снабжена панелью 42, выполненной с возможностью перемещения вдоль панели 40 грудной секции 4 (фиг.5).
Панели 40 и 42 снабжены соответствующими ограничителями 43 и 44 перемещений.
Рамка 38 и панель 40 грудной секции 4, а также панели 42 и 40 головной 3 и грудной 4 секции соединены между собой упругими элементами, например пружиной (не показаны).
Панели 42, 40 и 41 секций 3-5 кушетки обшиты искусственным покрытием, например кожзаменителем, под которым размещен наполнитель, например поролон (не показаны).
Грудная 4 и тазовая 5 секции кушетки снабжены элементами 45 подогрева, подключенными к программному блоку 32. Элементы 45 подогрева могут быть выполнены в виде полос термоткани (не показаны) на основе электропроводных полимерных тепловолокон [8].
Программный блок 32 выполнен на базе микроконтроллера и представляет собой печатную плату с размещенными на ней элементами микроэлектроники.
Выносной пульт 33 управления представляет собой соединенную через кабель панель с элементами индикации и снабжен кнопками управления: «вкл-выкл», «уровень подогрева», «уровень амплитуды», «уровень зоны», «длительность процедуры», «пуск», «пауза» и другими кнопками (не показаны), а также аварийную кнопку 46 (фиг.4). Устройство может содержать звуковой сигнализатор 47 завершения процедуры, подключенный к программному блоку 32.
Назначение и функции элементов и узлов устройства.
Основание, выполненное в виде горизонтальной рамы 1 с опорами 2, является главным несущим и связующим конструктивным элементом устройства и обеспечивает его устойчивость во время проведения процедур.
Кушетка предназначена для размещения на ней пациента. При этом секции 4 и 5 кушетки обеспечивают непосредственное механическое лечебное воздействие на тело пациента, а секция 3 выполняет функцию подголовника. Благодаря подвижности панелей 40 и 42 исключается трение спины пациента о грудную секцию 4 и его затылка о головную секцию 3 кушетки во время принятия процедур.
Вертикальные стойки 6 и 8 обеспечивают шарнирную кинематическую связь между основанием и секциями 4 и 5 кушетки.
Упругие элементы, например пружины, установленные между рамкой 38 и панелью 40 грудной секции 4, а также между панелями 42 головной 3 и грудной 4 секций, обеспечивают автоматический возврат панелей 40 и 42 в исходное положение по завершении процедуры.
Кинематическая связь, состоящая из последовательно соединенных «электропривод 11» -«выходной вал 15 электропривода 11» - «кривошип 14» - «толкатель 17», образует формирователь механических колебаний 48, представляющий собой электромеханический преобразователь угла поворота ротора электродвигателя электропривода 11 в возвратно-поступательные перемещения толкателя 17 (фиг.3).
Кинематическая связь, состоящая из последовательно соединенных «электропривод 21» - «шток 24» - «ползун 18» - «направляющая 19», образует регулятор амплитуды механических колебаний 49, представляющий собой электромеханический преобразователь угла поворота ротора электродвигателя электропривода 21 в поступательное перемещение ползуна 18 (фиг.3).
Кинематическая связь, состоящая из последовательно соединенных «электропривод 26» - «шток 29» - «платформа 13», образует регулятор зоны механических колебаний 50, представляющий собой электромеханический преобразователь угла поворота ротора электродвигателя электропривода 26 в угловое перемещение платформы 13 (фиг.3), а, следовательно, в перемещение размещенного на ней электропривода 11, толкателя 17, ползуна 18 и угловые смещения секций 4 и 5 кушетки.
Кинематическая связь, состоящая из шарнирно соединенных между собой грудной 4 и тазовой 5 секций кушетки образует узел 51 непосредственного механико-динамического воздействия на позвоночник (фиг.3).
Элементы 45 подогрева предназначены для повышения эффективности механического воздействия на тело пациента путем подогрева его мышц и связок перед выполнением и во время проведения процедур.
Программный блок 32 предназначен для реализации записанной в нем программы лечебной процедуры путем обработки поступающей на ее входы информационных сигналов и выдачи управляющих сигналов на свои выходы.
Выносной пульт 33 управления предназначен для индикации поступающих сигналов и ручного управления работой устройства.
Аварийная кнопка 46 пульта 33 обеспечивает аварийную остановку устройства при выполнении процедуры.
Звуковой сигнализатор 47 сообщает о завершении лечебной процедуры.
Принцип действия и работа устройства.
Перед началом работы устройство должно быть устойчиво размещено на ровной поверхности, а секции 4 и 5 кушетки должны находиться в горизонтальном положении. Желательно также, чтобы перед приемом процедур пациент был одет в спортивный костюм.
По завершении изучения болезни медработник помогает пациенту правильно разместиться на кушетке устройства. Пациент ложится спиной вниз, при этом зона пояса его на спине должна располагаться примерно на стыке между грудной 4 и тазовой 5 секциями, а голова - на секции 3 кушетки (в зависимости от болезни возможны иные варианты размещения пациента).
При нажатии на кнопку «вкл-выкл» на пульте 33 поступает питание в устройство. После этого, нажимая на другие кнопки пульта 33, медработник приступает к вводу в программный блок 32 значения параметров лечебной процедуры.
Нажимая на кнопку «длительность процедуры» пульта 33 медработник записывает в память программного блока 32 код, величина которого соответствует требуемой длительности процедуры.
Если прогрев спины не противопоказан пациенту, медработник путем нажатия на соответствующую кнопку устанавливает необходимый уровень обогрева. В результате на элементы 45 с программного блока 32 поступает питание и спина пациента подвергается тепловому облучению.
При нажатии на кнопку «уровень амплитуды» пульта 33 поступает питание на электропривод 21, в результате его шток 24 «выдвигается» из корпуса 22 (или, наоборот, «втягивается» в корпус 22) на необходимую величину, соответствующую устанавливаемому медработником уровню амплитуды механических колебаний. Движение штока 24 приводит к соответствующему перемещению ползуна 18 вдоль направляющей 19.
На фиг.7 показано, как при изменении положения ползуна 18 вдоль направляющей 19 изменяется амплитуда колебаний секций кушетки, а на фиг.8 показаны положения грудной 4 и тазовой 5 секций кушетки при изменении уровня амплитуд колебаний.
При нажатии на кнопку «уровень зоны колебаний» пульта 33 поступает питание на электропривод 26, в результате чего шток 29 «выдвигается» из корпуса 27 (или, наоборот, «втягивается» в корпус 27) на необходимую величину, соответствующую установленную медработником уровню зоны механических колебаний. Движение штока 29 приводит к соответствующему угловому смещению платформы 13 на шарнирах 31, а следовательно, к такому же угловому смещению размещенного на ней электропривода 11. Последний перемещает толкатель 17 и шарнирно соединенный с ним ползун 18 вверх.
При нажатии на кнопку «пуск» пульта 33 поступает питание на электропривод 11, в результате чего выходной вал 15 и кривошип 14 начинают вращаться, увлекая за собой шарнир 16, ось вращения которого на величину эксцентриситета смещена от оси вращения вала 15. В результате толкатель 17, а следовательно, и ползун 18, начинают совершать возвратно-поступательные перемещения (вверх и вниз), заставляя тем самым периодически менять свои угловые положения (т.е. колебаться) шарнирно соединенные секции 4 и 5 кушетки. При этом данные секции поворачиваются также вокруг соответствующих шарниров 7 и 10, а изменения их углового положения сопровождаются отклонениями от вертикали рамы 8.
На фиг.8 и 9 показаны угловые смещения секций 4 и 5 кушетки относительно исходной горизонтальной плоскости O1-O2, проходящей через шарнир 37, соединяющий данные секции.
Для случая, когда уровень зоны механических колебаний равен нулю (электропривод 26 медработником не включался), угловые смещения секций 4 и 5 абсолютно симметричны относительно данной плоскости O1-O2 (фиг.8). Такие же симметричные угловые перемещения относительно плоскости O1-O2 будут совершать и позвонки позвоночника пациента, т.е. в этом случае позвоночник прогибается вперед и назад в сагиттальной плоскости одинаково.
Амплитуда А колебаний определяется положением ползуна 18 на направляющей 19 (фиг.7). Если ползун 18 сместился на одну и ту же величину Δh от горизонтальной плоскости O1-O2, но при этом положения его вдоль направляющей 19 отличаются на величину ΔI=I1-I2, то и амплитуда колебаний секций 4 и 5 кушетки изменяется на некоторую величину ΔA=A1-A2.
Размах Pi колебаний (расстояние между максимально верхним и максимально нижним положениями (например, шарнира 37) соответствует удвоенному значению амплитуды Ai колебаний, т.е. Pi=2Ai (фиг.8).
Для случая, когда уровень зоны механических колебаний был установлен медработником отличным от нуля, угловые смещения секций 4 и 5 перестают быть симметричными относительно данной плоскости O1-O2 (фиг.9). Чем больший уровень зоны колебаний предварительно был установлен медработником, тем большая часть угловых смещений секций 4 и 5 будет приходиться на зону выше исходной плоскости O1-O2 и тем больше будет прогибаться лежащий на спине пациент назад (соответственно, тем меньше вперед).
При изменении уровня зоны колебаний (при одной и той же установленной амплитуде), так как эксцентриситет кривошипа 14 не меняется, остается неизменным и размах колебаний: Pi=2Ai=const (см. фиг.9).
Медработник, в зависимости от вида болезни позвоночника пациента, может выбирать для его лечения различные описанные выше траектории перемещения секций 4 и 5 кушетки. Параметры процедур могут меняться непосредственно во время работы устройства без предварительной его остановки.
На фиг.10 показано изменение расстояния между поверхностями грудной 4 и тазовой 5 секций кушетки во время работы устройства. Предположим, что при горизонтальном положении данных секций две точки на их поверхности занимают положения а и 6, расстояние между которыми равно, например, L1. С поворотом секций расстояние между указанными точками будет уже другим, например равным L2. Следовательно, во время работы устройства расстояние между этими точками будет периодически меняться на величину Δ=L1-L2. Такое изменение расстояния между поверхностями грудной 4 и тазовой 5 секций устройства будет вызывать во время процедур скольжение (трение) тела и затылка лежащего на нем пациента о поверхность кушетки. Выполнение головной 3 и грудной 4 секций подвижными в продольном направлении исключает такое трение.
Начиная с момента нажатия кнопки «пуск» на пульте 33 программный блок 32 подсчитывает количество импульсов, поступающих на него с датчика 34 электропривода 11, и сравнивает это количество с хранящимся в нем кодом длительности процедуры. При совпадении указанных кодов блок 32 останавливает работу устройства.
Останов устройства происходит также в любой момент при нажатии аварийной кнопки 46. В любом случае его остановка сопровождается возвратом всех механизмов и узлов устройства в исходное состояние. В частности, возвращаются в горизонтальное положение грудная 4 и тазовая 5 секции кушетки.
Таким образом, описываемое устройство может быть использовано для профилактики и лечения заболеваний позвоночника путем разработки движений сгибания и разгибания в поясничном отделе.
При этом оно обладает следующими достоинствами.
1. Облегчается труд медработника. Благодаря замене ручных приводов регуляторов амплитуды и зоны колебаний электроприводами достигается автоматизация ручных операций. Работа медработника сводится к установке на пульте уровней параметров процедуры.
2. Кроме того, у прототипа пульт управления размещен на платформе под кушеткой. Поэтому медработнику приходится постоянно нагибаться к пульту управления, чтобы обеспечить ввод параметров процедуры в устройство. В заявляемом устройстве, благодаря наличию выносного пульта управления, исключен данный недостаток.
3. Наличие у заявляемого устройства дополнительно головной секции позволяет пациенту более удобно расположиться на кушетке путем использования ее в качестве подголовника.
4. Выполнение панели головной секции с возможностью перемещения вдоль панели грудной секции и выполнение панели грудной секции подвижной относительно панели тазовой секции исключает трение головы и тела пациента о поверхность кушетки во время приема процедур.
5. Грудная и тазовая секции кушетки заявляемого устройства содержат элементы подогрева. Благодаря этому повышается эффективность лечебного механического воздействия на тело пациента во время приема процедур.
6. Благодаря выполнению пульта управления выносным у пациента имеется возможность самостоятельно управлять лечебной процедурой.
7. Наличие у пульта управления аварийной кнопки позволяет, при необходимости, обеспечить экстренную остановку устройства.
8. Предлагаемое устройство не требует специалистов высокой квалификации, предварительной их подготовки. Лечебную процедуру может осуществлять медсестра или сам пациент по предписанию врача.
Проверка соответствия устройства условию патентоспособности «промышленная применимость».
По мнению заявителя, сведения, приведенные в описании, достаточны для осуществления устройства. Такое устройство для механотерапии позвоночника не вызывает затруднений при его изготовлении и может быть промышленно освоено. Опытный экземпляр устройства испытан заявителем в течение месяца в эксплуатации.
Совокупность существенных признаков, характеризующих сущность изобретения, в принципе может быть многократно использована при лечении и профилактике болезней позвоночника, Указанное позволяет сделать вывод о соответствии изобретения условию патентоспособности «промышленная применимость» по действующему законодательству.
Таким образом, заявляемое устройство для механотерапии позвоночника отвечает требуемым условиям патентоспособности и обладает значительными преимуществами по сравнению с известными устройствами аналогичного назначения.
Использованные источники
1. Универсальный медицинский справочник. - М.: ЭКСМО, Издательский дом «Прогресс», 2004.
2. Патент РФ №2214211 на изобретение «Способ восстановления функции суставов механотерапией», опубл. 20.10.2003 г.
3. Патент РФ №2214212 на изобретение «Устройство для восстановления функции суставов механотерапией», опубл. 20.10.2003 г.
4. Патент РФ №2071750 на изобретение «Устройство для механотерапии позвоночника», опубл. 20.01.1997 г.
5. Патент РФ №1041112 на изобретение «Устройство для лечения заболеваний позвоночника», опубл. 15.09.1983 г.
6. Авторское свидетельство RU №1584946 на изобретение «Устройство для механотерапии «Ритм», опубл. 15.08.1990 г.
7. Патент РФ №2360659 на изобретение «Устройство для механотерапии при лечении и профилактике заболеваний позвоночника», опубл. 10.07.2009 г. (прототип).
8. Автомобильные электронагреватели Термософт. Журнал «Автомобильный Екатеринбург». №47, 2003 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| МЕХАНОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА ДЛЯ МАССАЖА И ГРАВИТАЦИОННОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2012 |
|
RU2512959C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2006 |
|
RU2320165C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2005 |
|
RU2275941C1 |
| Устройство для вытяжения позвоночника | 2019 |
|
RU2712312C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2008 |
|
RU2386428C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2013 |
|
RU2539421C2 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА | 2006 |
|
RU2308257C1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ГОРИЗОНТАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2011 |
|
RU2465882C2 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2007 |
|
RU2336069C1 |








Изобретение относится к медицине и лечебной физкультуре и может быть использовано для профилактики и лечения заболеваний позвоночника. Устройство содержит основание, выполненное в виде горизонтальной рамы с опорами, кушетку, состоящую из шарнирно соединенных между собой грудной и тазовой секций, первую и вторую вертикальные рамы, нижние части которых жестко соединены с горизонтальной рамой, а верхние части шарнирно соединены соответственно с грудной и тазовой секциями кушетки, первый электропривод, размещенный на платформе, кривошип, насаженный на выходной вал первого электропривода и шарнирно соединенный с нижним концом толкателя, ползун, снабженный направляющим для перемещения вдоль грудной секции кушетки и шарнирно соединенный с верхним концом толкателя, программный блок и подключенный к нему пульт управления. Устройство содержит также второй электропривод, корпус которого шарнирно соединен с грудной секцией кушетки, а выдвижной шток шарнирно соединен с ползуном, третий электропривод, корпус которого шарнирно соединен с верхней частью первой вертикальной рамы, а его выдвижной шток шарнирно соединен с одним концом платформы, другой конец которого шарнирно соединен с основанием. Все электроприводы снабжены датчиками положения, а второй и третий электроприводы дополнительно - концевыми выключателями. Входы программного блока подключены к выходам датчиков положения и концевых выключателей, а выходы программного блока - к входам электроприводов, пульт управления выполнен выносным. Нижняя часть второй вертикальной рамы шарнирно соединена с горизонтальной рамой. Технический результат - расширение арсенала технических средств указанного назначения. 9 з.п. ф-лы, 10 ил.
1. Устройство для механотерапии позвоночника, содержащее основание, выполненное в виде горизонтальной рамы с опорами, кушетку, состоящую из шарнирно соединенных между собой грудной и тазовой секций, первую вертикальную раму, нижняя часть которой жестко соединена с горизонтальной рамой, а верхняя часть шарнирно соединена с грудной секцией кушетки, вторую вертикальную раму, верхняя часть которой шарнирно соединена с тазовой секцией кушетки, первый электропривод, корпус которого размещен на платформе, кривошип, насаженный на выходной вал первого электропривода и шарнирно соединенный с нижним концом толкателя, ползун, снабженный направляющим для перемещения вдоль грудной секции кушетки и шарнирно соединенный с верхним концом толкателя, программный блок и подключенный к нему пульт управления, отличающееся тем, что содержит второй электропривод, корпус которого шарнирно соединен с грудной секцией кушетки, а выдвижной шток шарнирно соединен с ползуном, третий электропривод, корпус которого шарнирно соединен с верхней частью первой вертикальной рамы, а его выдвижной шток шарнирно соединен с одним концом платформы, другой конец которого шарнирно соединен с основанием, при этом первый, второй и третий электроприводы снабжены датчиками положения, а второй и третий электроприводы дополнительно - концевыми выключателями, входы программного блока подключены к выходам датчиков положения и концевых выключателей, а выходы программного блока - к входам первого, второго и третьего электроприводов, пульт управления выполнен выносным, а нижняя часть второй вертикальной рамы шарнирно соединена с горизонтальной рамой.
2. Устройство по п.1, отличающееся тем, что грудная и тазовая секции кушетки снабжены элементами подогрева, подключенными к программному блоку.
3. Устройство по п.1, отличающееся тем, что пульт управления снабжен аварийной кнопкой,
4. Устройство по п.1, отличающееся тем, что кушетка содержит головную секцию.
5. Устройство по п.1, отличающееся тем, что грудная и тазовая секции кушетки выполнены в виде рамок с размещенными на них панелями.
6. Устройство по п.5, отличающееся тем, что панель грудной секции выполнена подвижной относительно панели тазовой секции.
7. Устройство по п.5, отличающееся тем, что головная секция снабжена панелью, выполненной с возможностью перемещения вдоль панели грудной секции.
8. Устройство по п.6 или п.7, отличающееся тем, что головная и грудная секции кушетки снабжены ограничителями перемещений соответствующих панелей.
9. Устройство по п.6 или п.7, отличающееся тем, что рамка и панель грудной секции, а также панели головной и грудной секции связаны упругим элементом, например пружиной.
10. Устройство по п.1 или п.4, отличающееся тем, что панели секций кушетки обшиты искусственным покрытием, например кожзаменителем, под которым размещен наполнитель, например поролон.
| УСТРОЙСТВО ДЛЯ МЕХАНОТЕРАПИИ ПРИ ЛЕЧЕНИИ И ПРОФИЛАКТИКЕ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА | 2007 |
|
RU2360659C1 |
| US 2005010145 A1, 13.01.2005 | |||
| JP 2001333947 A, 04.12.2001 | |||
| JP 2005323945 A, 24.11.2005. | |||

