Изобретение относится к медицинской технике, а более конкретно - к средствам для лечебного механического воздействия на позвоночник.
Установление предшествующего уровня техники
Известно устройство для вытяжения позвоночника, содержащее исполнительный механизм, кинематически связанный с элементом фиксации тела пациента, причем кинематическая цепь включает в себя вибратор, выполненный, например, в виде электромагнита [1].
Его конструкция не обладает достаточной жесткостью и устойчивостью, удобством при эксплуатации. Кроме того, к причинам, препятствующим достижению требуемого технического результата, относится то, что известное устройство не обладает возможностью обеспечения линейного медленно-изменяющегося нагружения позвоночника.
Известно также устройство для вытяжения позвоночника, содержащее корпус, исполнительный механизм, манжету, элемент фиксации пациента, кинематически связанную с исполнительным механизмом при помощи гибкой связи, систему управления исполнительным механизмом, включающую последовательно соединенные блок питания, программно-временное устройство и блок коммутации [2].
Его конструкция также не обладает достаточной жесткостью и устойчивостью, удобством при эксплуатации. Кроме того, к причинам, препятствующим достижению требуемого технического результата, относится также то, что известное устройство не обладает возможностью обеспечения линейного медленно изменяющегося нагружения позвоночника.
Известно устройство для механизированного массажа и вытяжения, содержащее кушетку с приспособлениями для фиксации тела пациента, станину, массажные элементы, выполненные в виде группы вращающихся и перемещающихся вдоль корпуса роликов, нагревательный элемент и программный блок, при этом кушетка установлена на станине с возможностью поворота вокруг горизонтальной оси посредством привода [3].
Недостатки такого устройства:
- велика вероятность опрокидывания устройства, вызванная его неустойчивостью в наклонном положении его кушетки (особенно при наличии на нем пациента). При наклоне кушетки центр тяжести устройства смещается вверх, а площадь опоры ограничена неподвижной станиной, на которую кушетка опирается лишь одним концом;
- относительно низкая эффективность вытяжения позвоночника, обусловленная наличием трения между тазобедренным участком тела пациента и поверхностью кушетки.
Известно также устройство для массажа и вытяжения позвоночника, содержащее полый корпус, установленный одним концом на неподвижных, например резиновых, опорах, а другим концом - на подвижной раме, шарнирно соединенной с корпусом и снабженной роликами перемещения по опорной поверхности, кушетку с прорезью, размещенную на корпусе и образованную из неподвижной секции, снабженной фиксаторами тела пациента и тепловыми пластинами, и подвижной секции, выполненной с возможностью продольного возвратно-поступательного перемещения по направляющим на роликах, размещенные внутри корпуса первую тележку, установленную на направляющих и снабженную механизмом перемещения с электроприводом перемещения, первый подъемный механизм, установленный на первой тележке и снабженный электроприводом подъема, первую платформу, установленную на первом подъемном механизме и снабженную размещенными в прорезях кушетки роликами-массажерами, вибратор, установленный на первой платформе и снабженный электроприводом вибрации, механизм наклона корпуса, шарнирно соединенный с корпусом и подвижной рамой и снабженный электроприводом наклона корпуса, датчики уровня подъема и угла наклона корпуса, и программный блок с панелью управления, входы которого соединены с выходами датчиков уровня подъема и угла наклона корпуса, а выходы - с электроприводами перемещения, подъема, вибрации, наклона корпуса и тепловыми пластинами, которое содержит также подколенник, выполненный в виде второй платформы, установленной над подвижной секцией кушетки и снабженной вертикальными стойками, проходящими через продольный паз, выполненный в подвижной секции кушетки, размещенные внутри корпуса вторую тележку, установленную на направляющих, второй подъемный механизм, установленный на второй тележке и снабженный электроприводом подъема и втулками, внутри которых размещены вертикальные стойки второй платформы, при этом электропривод второго подъемного механизма соединен с выходом программного блока [4].
Данное устройство характеризуется такими недостатками, как относительно низкая жесткость и устойчивость конструкции устройства, отсутствие удобства его эксплуатации.
Характеристика и критика прототипа
Наиболее близким изобретением к предлагаемому по наибольшему количеству сходных признаков, технической сущности, схемному решению и достигаемому при использовании медико-техническому результату является устройство для массажа и вытяжения позвоночника, описанное в [5].
Такое устройство, выбранное в качестве прототипа, содержит:
- полый корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена элементами фиксации, гибкими связями и нагревательным элементом,
размещенные внутри корпуса:
- узлы массажа, поджатия, перемещения, наклона и датчик угла наклона, а также программный блок и опорную раму,
при этом:
- корпус размещен одним концом на неподвижных, например резиновых, опорах, а другим концом - на опорной раме, шарнирно соединенной с корпусом и снабженной роликами перемещения (по полу),
- кушетка образована неподвижной и подвижной секциями, причем в неподвижной секции выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой, а подвижная секция выполнена с возможностью продольного возвратно-поступательного перемещения по направляющим,
- узел массажа выполнен в виде верхней тележки, снабженной роликами-массажерами и электровибратором,
- узел перемещения снабжен электроприводом и выполнен в виде нижней тележки, ролики которого установлены сверху на направляющих, прикрепленных внутри к корпусу, и цепной передачей, обеспечивающей через кулачковый элемент, жестко соединенный с нижней тележкой, гибкую кинематическую связь между ней и электроприводом данного узла,
- узел поджатия установлен на нижней тележке, размещенной на рельсах, и выполнен в виде подъемного механизма, верхний конец которого шарнирно соединен с верхней тележкой,
- узел наклона снабжен электроприводом, первый и второй концы которого шарнирно соединены соответственно с опорной рамой и корпусом,
- датчик угла наклона выполнен в виде потенциометра, основание которого закреплено на корпусе, а вал кинематически связан с опорной рамой,
- входы программного блока подключены к выходу датчика угла наклона, а его выходы - к нагревательныму элементу, электровибратору и электроприводам узлов перемещения, поджатия и наклона.
Прототип характеризуется следующими недостатками:
а) относительно низкая жесткость и устойчивость конструкции устройства;
б) отсутствие удобства его эксплуатации.
Медико-технические результаты и их достижение
Изобретение направлено на достижение таких медико-технических результатов, как
- повышение жесткости и устойчивости устройства;
- обеспечение удобства его эксплуатации.
Достижение указанных технических результатов обеспечивается тем, что известное устройство для массажа и вытяжения позвоночника, содержащее:
- полый корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена элементами фиксации, гибкими связями и нагревательным элементом,
размещенные внутри корпуса:
- узлы массажа, поджатия, перемещения, наклона и датчик угла наклона, а также программный блок и опорную раму,
при этом:
- кушетка образована неподвижной и подвижной секциями, причем в неподвижной секции выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой, а подвижная секция выполнена с возможностью продольного возвратно-поступательного перемещения по направляющим,
- узел массажа выполнен в виде верхней тележки, снабженной роликами-массажерами и электровибратором,
- узел перемещения выполнен в виде нижней тележки и снабжен электроприводом,
- узел поджатия установлен на нижней тележке и выполнен в виде подъемного механизма, шарнирно соединенного с верхней тележкой,
- узел наклона снабжен электроприводом, первый конец которого шарнирно соединен с опорной рамой,
- входы программного блока подключены к выходу датчика угла наклона, а его выходы - к нагревательному элементу, электровибратору и электроприводам узлов перемещения и наклона,
отличается тем, что:
- узел наклона и датчик угла наклона размещены под корпусом,
- корпус закреплен на опорной раме и снабжен парой С-образных опор, жестко соединенных между собой двумя верхними перемычками и одной нижней перемычкой, шарнирно соединенной со вторым концом электропривода узла наклона,
- узел перемещения снабжен также ремнем, размещенным на двух шкивах и обеспечивающим гибкую кинематическую связь между нижней тележкой и электроприводом данного узла,
- нижняя тележка выполнена в виде рамы с продольными и поперечными участками и снабжена роликами, установленными на направляющих С-образного сечения, прикрепленных к кушетке снизу, а также ограничителем перемещений, состоящим из жестко соединенного с ней поперечного кронштейна и прикрепленных к кушетке двух сигнализаторов крайнего положения, электрические выходы которых подключены к входам программного блока,
- узел поджатия выполнен в виде четырехзвенного шарнирно-рычажного механизма, одни концы всех звеньев которого шарнирно соединены с верхней тележкой, другие концы первого и второго звеньев снабжены роликами, установленными на боковых участках нижней тележки, а другие концы третьего и четвертого звеньев шарнирно связаны с задним участком нижней тележки,
при этом:
- узел поджатия снабжен также механизмом регулировки высоты роликов-массажеров, состоящим из гайки, закрепленной на переднем участке нижней тележки, вилки, шарнирно соединенной с четырехзвенным шарнирно-рычажным механизмом и снабженной резьбовым участком, находящимся в зацеплении с указанной гайкой, и нажимного вала с рукояткой, установленного на корпусе и выполненного с возможностью зацепления с данной вилкой.
Кроме того:
- подвижная секция кушетки снабжена стопором перемещения;
- датчик угла наклона выполнен в виде элемента Холла, встроенного в электропривод узла наклона.
Заявителем не обнаружены устройства, в которых медико-технический результат достигнут аналогичной совокупностью существенных признаков. При этом проведенный анализ уровня техники, включающий поиск по патентным и другим научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах изобретения, позволили установить, что не имеются аналоги, характеризующиеся признаками, идентичными всем существенным признакам изобретения, а выделение из перечня аналогов прототипа [5] выявило совокупность существенных по отношению к техническим результатам отличительных признаков заявленного изобретения.
Другими словами, по имеющимся у заявителя сведениям аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного устройства, отсутствуют.
Заявителем проведена также проверка соответствия указанной совокупности существенных признаков устройства трем условиям патентоспособности.
Соответствие условию патентоспособности «новизна»
Для оценки новизны заявляемого технического решения проанализирована вышеприведенная совокупность существенных признаков заявляемого устройства и выделены признаки заявляемого устройства, совпадающие с признаками прототипа.
Устройство содержит:
- полый корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена элементами фиксации, гибкими связями и нагревательным элементом, размещенные внутри корпуса узлы массажа, поджатия, перемещения, наклона и датчик угла наклона, а также программный блок и опорную раму, при этом кушетка образована неподвижной и подвижной секциями, причем в неподвижной секции выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой, а подвижная секция выполнена с возможностью продольного возвратно-поступательного перемещения по направляющим, узел массажа выполнен в виде верхней тележки, снабженной роликами-массажерами и электровибратором, узел перемещения выполнен в виде нижней тележки и снабжен электроприводом, узел поджатия установлен на нижней тележке и выполнен в виде подъемного механизма, шарнирно соединенного с верхней тележкой, узел наклона снабжен электроприводом, первый конец которого шарнирно соединен с опорной рамой, а входы программного блока подключены к выходу датчика угла наклона, а его выходы - к нагревательному элементу, электровибратору и электроприводам узлов перемещения и наклона.
Признаки заявляемого устройства, не совпадающие с признаками прототипа:
- узел наклона и датчик угла наклона размещены под корпусом,
- корпус закреплен на опорной раме и снабжен парой С-образных опор, жестко соединенных между собой двумя верхними перемычками и одной нижней перемычкой, шарнирно соединенной со вторым концом электропривода узла наклона,
- узел перемещения снабжен также ремнем, размещенным на двух шкивах и обеспечивающим гибкую кинематическую связь между нижней тележкой и электроприводом данного узла,
- нижняя тележка выполнена в виде рамы с продольными и поперечными участками и снабжена, роликами, установленными на направляющих С-образного сечения, прикрепленных к кушетке снизу, а также ограничителем перемещений, состоящим из жестко соединенного с ней поперечного кронштейна и прикрепленных к кушетке двух сигнализаторов крайнего положения, электрические выходы которых подключены к входам программного блока,
- узел поджатия выполнен в виде четырехзвенного шарнирно-рычажного механизма, одни концы всех звеньев которого шарнирно соединены с верхней тележкой, другие концы первого и второго звеньев снабжены роликами, установленными на боковых участках нижней тележки, а другие концы третьего и четвертого звеньев шарнирно связаны с задним участком нижней тележки,
при этом:
- узел поджатия снабжен также механизмом регулировки высоты роликов-массажеров, состоящим из гайки, закрепленной на переднем участке нижней тележки, вилки, шарнирно соединенной с четырехзвенным шарнирно-рычажным механизмом и снабженной резьбовым участком, находящимся в зацеплении с указанной гайкой, и нажимного вала с рукояткой, установленного на корпусе и выполненного с возможностью зацепления с данной вилкой.
Кроме того:
- подвижная секция кушетки снабжена стопором перемещения;
- датчик угла наклона выполнен в виде элемента Холла, встроенного в электропривод узла наклона.
Наличие данных признаков обеспечивает соответствие всей совокупности признаков условию патентоспособности «новизна». При этом не обнаружены устройства, в которых технический результат достигнут аналогичной совокупностью существенных признаков.
Соответствие условию патентоспособности «изобретательский уровень»
Для проверки соответствия требованию изобретательского уровня заявителем проведен дополнительный поиск и анализ решений по патентной и другой научно-технической и медико-технической литературе. При этом не выявлены устройства аналогичного назначения с признаками, сходными с отличительными признаками заявленного объекта. Совокупность его признаков не является очевидной из уровня техники, на основании чего был сделан вывод о том, что предлагаемый объект соответствует условию патентоспособности «изобретательский уровень» по действующему законодательству.
При этом следует отметить, что между совокупностью существенных признаков настоящего изобретения и достигаемым техническим результатом существует причинно-следственная связь, поскольку указанный технический результат достигается лишь при совместном использовании всех без исключения известных и отличительных признаков.
Настоящее изобретение поясняется конкретным примером исполнения, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения требуемого медико-технического результата.
Сущность изобретения
Сущность данного изобретения поясняется чертежами, представленными на фиг.1-15, где:
- на фиг.1 - конструктивная схема устройства;
- на фиг.2 - структурная схема устройства;
- на фиг.3 - упрощенная кинематическая схема узлов массажа, поджатия и перемещения;
- на фиг.4 - электромеханическая схема узлов массажа, поджатия и перемещения (вид снизу);
- на фиг.5 - узлы массажа, поджатия и перемещения (упрощенная конструктивная схема, вид сверху);
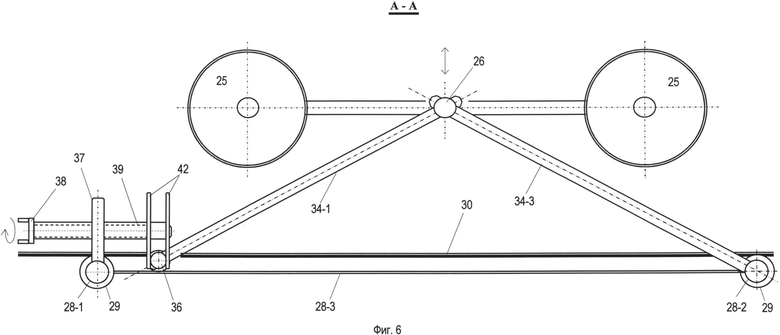
- на фиг.6 - узлы массажа, поджатия и перемещения (упрощенная конструктивная схема, вид спереди);
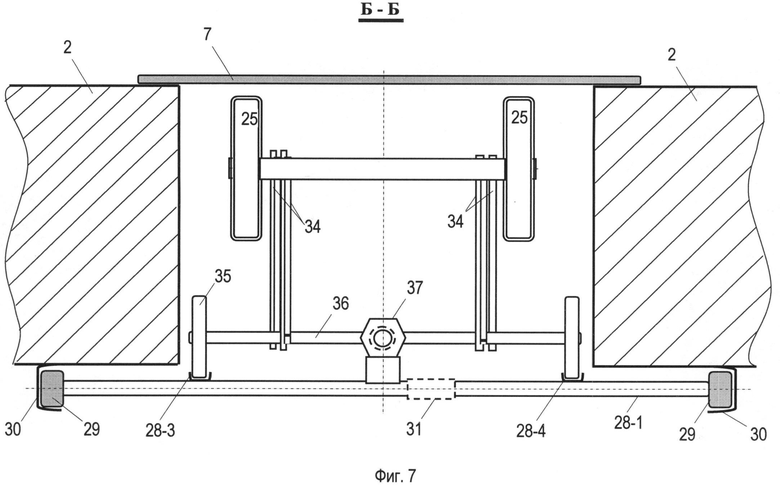
- на фиг.7 - узлы массажа, поджатия и перемещения (упрощенная конструктивная схема, вид с торца);
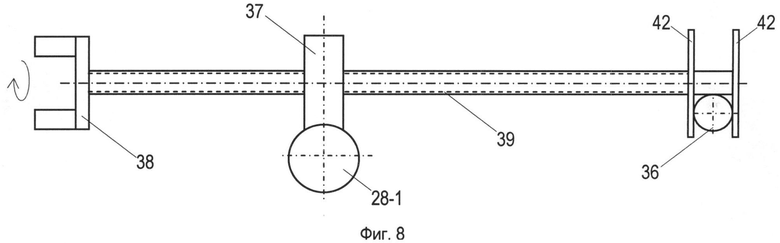
- на фиг.8 - механизм регулировки высоты роликов-массажеров (упрощенная конструктивная схема);
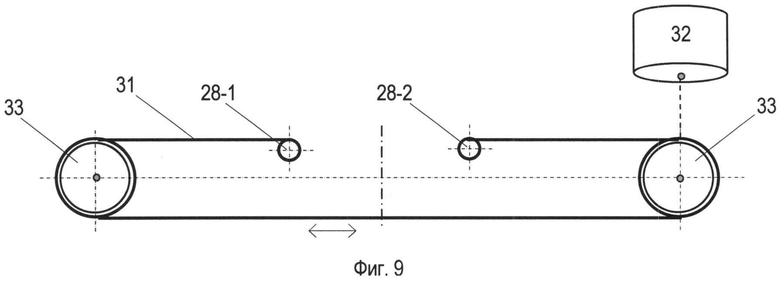
- на фиг.9 - схема размещения зубчатого ремня;
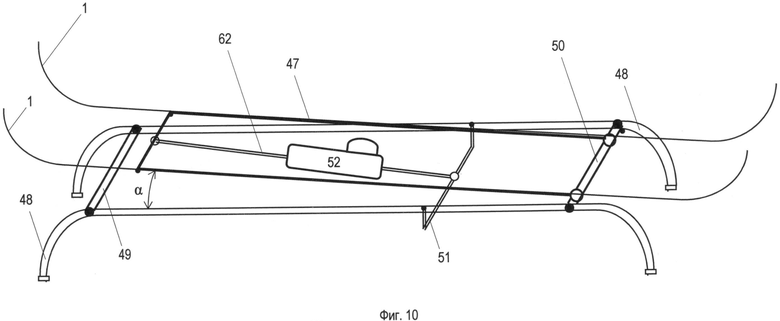
- на фиг.10 - упрощенная кинематическая схема узла наклона;
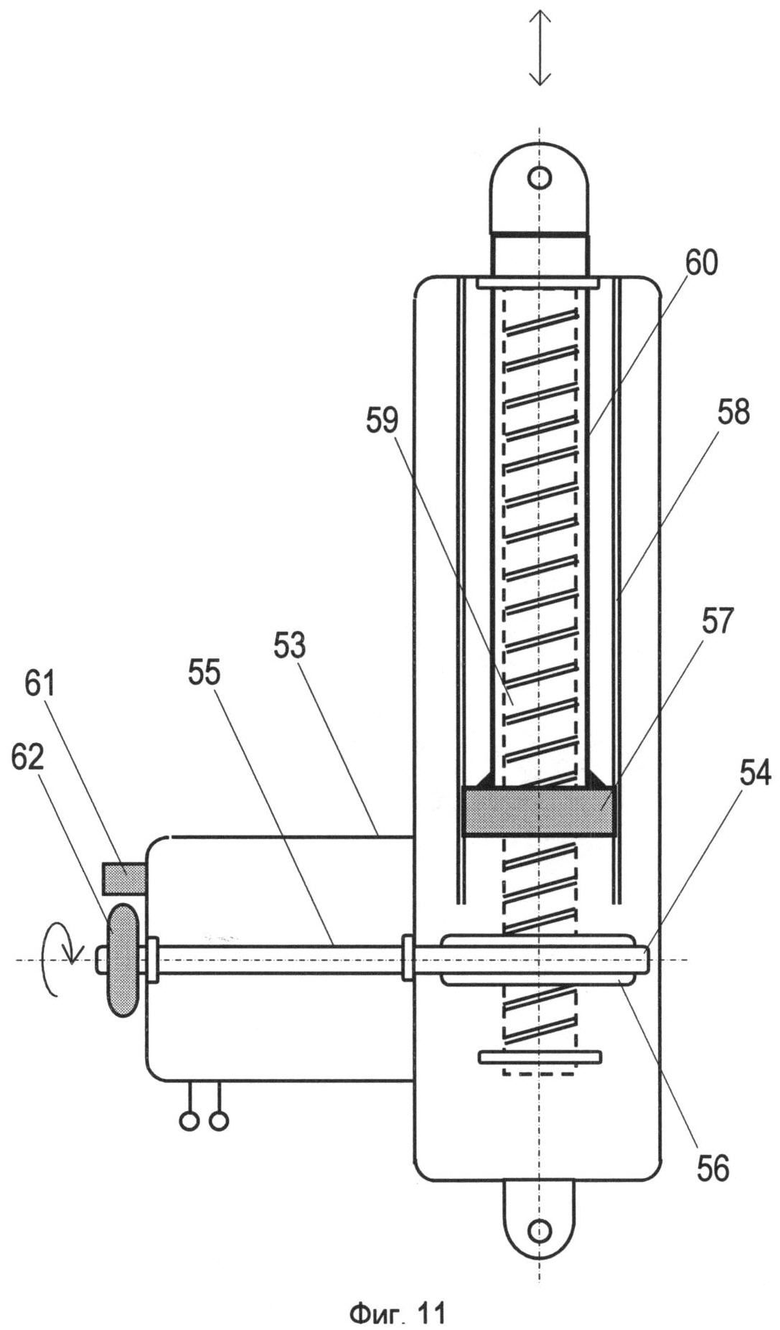
- на фиг.11 - электропривод узла наклона;
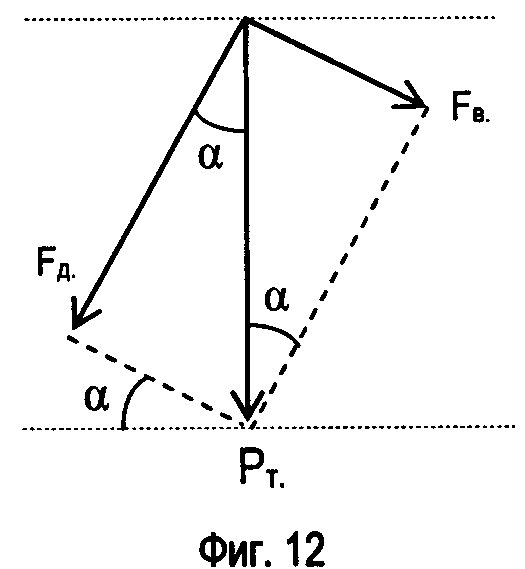
- на фиг.12 - схема, поясняющая формирование сил вытяжения ШОП и ГОП;
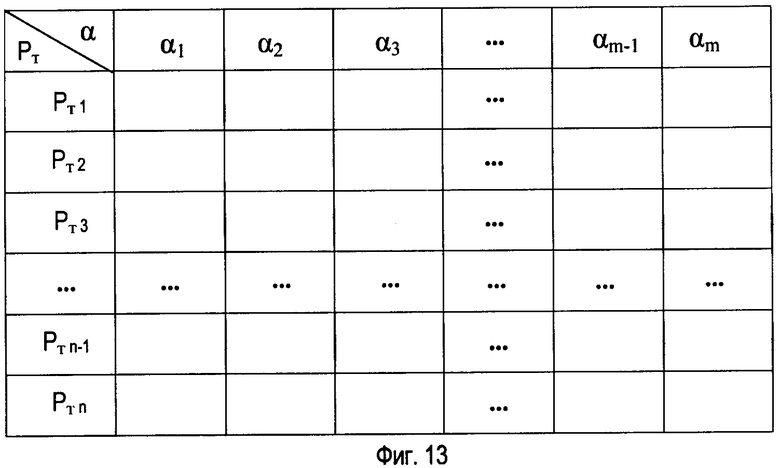
- на фиг.13 - таблица значений сил вытяжения;
- на фиг.14 - внешний вид устройства;
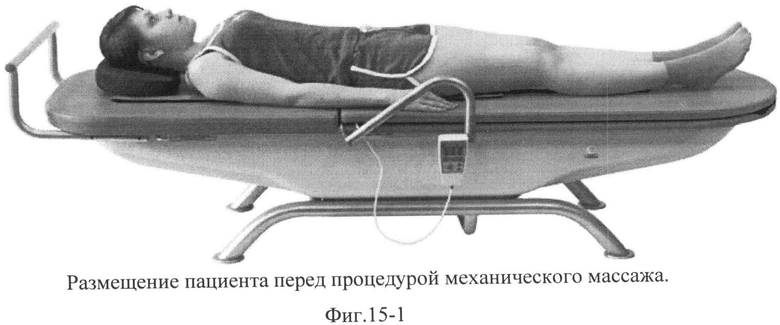
- на фиг.15-1 - размещение пациента на кушетке перед процедурой вибромеханического массажа;
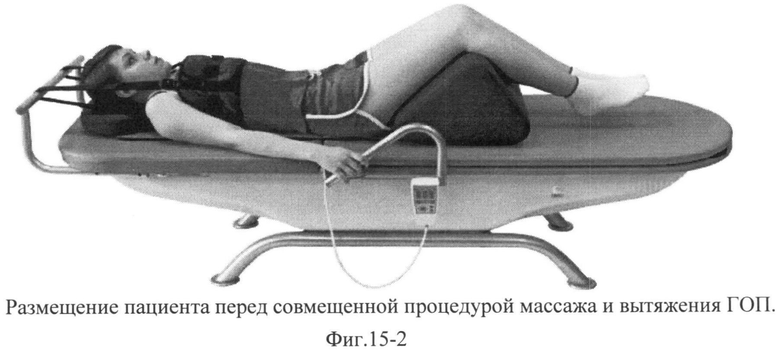
- на фиг.15-2 - размещение пациента на кушетке перед выполнением совмещенной процедуры вибромеханического массажа и вытяжения ГОП;
- на фиг.15-3 - выполнение совмещенной процедуры (вибро)механического массажа и вытяжения ГОП.
Описание конструкции устройства (в статике)
Устройство для массажа и вытяжения позвоночника содержит (фиг.1) полый стеклопластиковый корпус 1, верхняя (рабочая) поверхность которого выполнена в виде кушетки, состоящей из панели, обшитой искусственным покрытием (кожзаменителем), под которым размещен наполнитель (поролон, изолон).
Кушетка состоит из неподвижной «грудной» 2 и подвижной «тазобедренной» 3 секций. Последняя снабжена роликами 4, которые позволяют совершать ей продольные возвратно-поступательные перемещения по направляющим, прикрепленным к кушетке сверху (не показаны).
В кушетке, кроме того, выполнена продольная прямоугольная прорезь 5, соответствующая расположению позвоночника пациента 6 (фиг.2) на кушетке и закрытая сверху накидкой 7 (фиг.1,7). Последняя снабжена для ее крепления на кушетке «липучками» (не показаны). В накидку 7 вшиты нагревательные элементы 8 (фиг.2), выполненные из полос термоткани на основе электропроводных полимерных тепловолокон [6].
Кушетка имеет также элементы 9 фиксации (петля Глиссона 9-1 и грудной пояс 9-2) и гибкие связи 10 (фиг.2).
Корпус 1 устройства снабжен двумя боковыми поручнями 11 (фиг.1), размещенными параллельно по разные стороны от продольной оси кушетки, а также передним поручнем 12 и рукояткой 13, размещенными на торце корпуса 1 со стороны неподвижной секции 2.
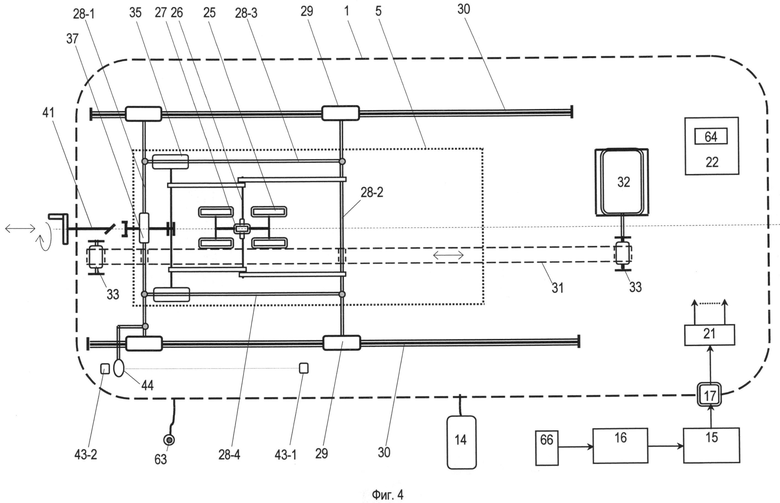
Устройство имеет также выносной пульт 14 управления, размещенный, когда не используется, на перемычке одного из поручней 11 (фиг.1), сетевой кабель 15 с электрической вилкой 16 и кнопочный выключатель 17 «Сеть» (фиг.4).
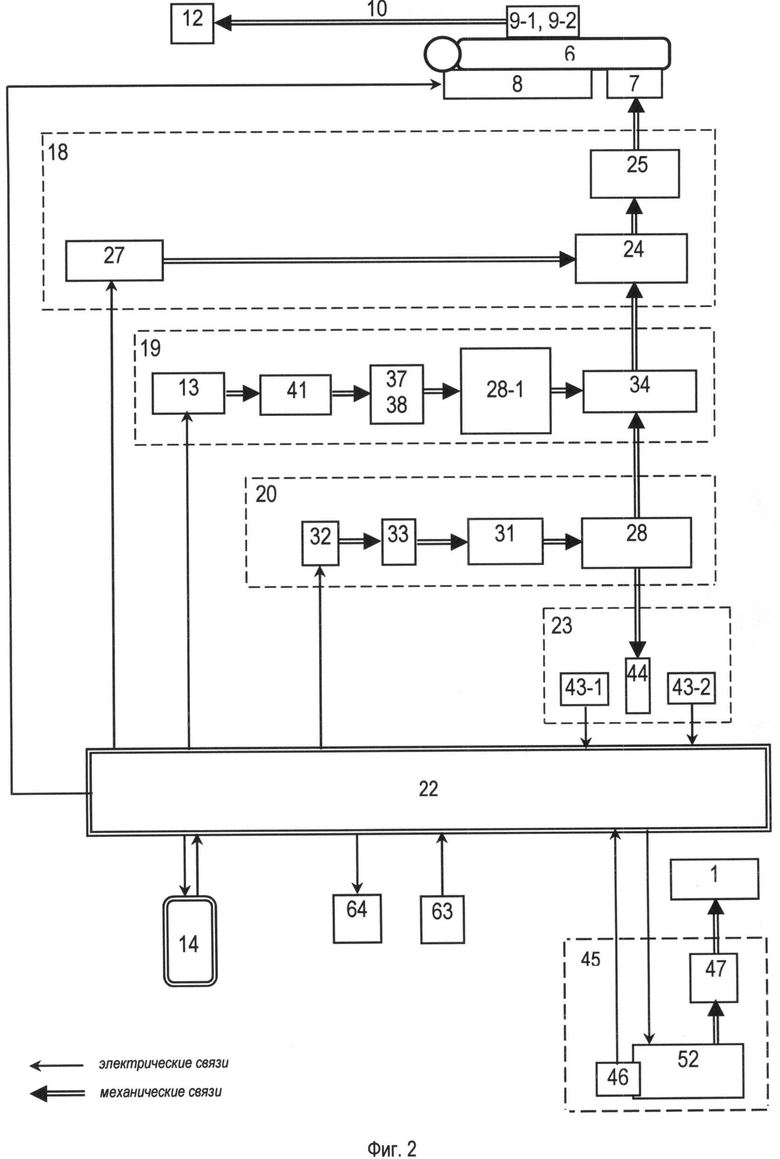
Внутри корпуса 1 устройства размещены узлы массажа 18, поджатия 19, перемещения 20, блок 21 питания (фиг.4), программный блок 22, а также ограничитель перемещений 23 (фиг.2).
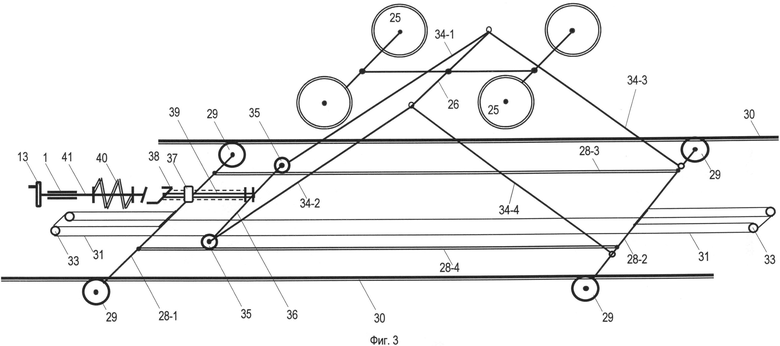
Узел 18 массажа выполнен в виде верхней тележки 24, снабженной роликами-массажерами 25, центральной осью 26 (фиг.3) и электровибратором 27. Последний выполнен на основе электродвигателя постоянного тока, на вал которого насажен эксцентрик (не показаны).
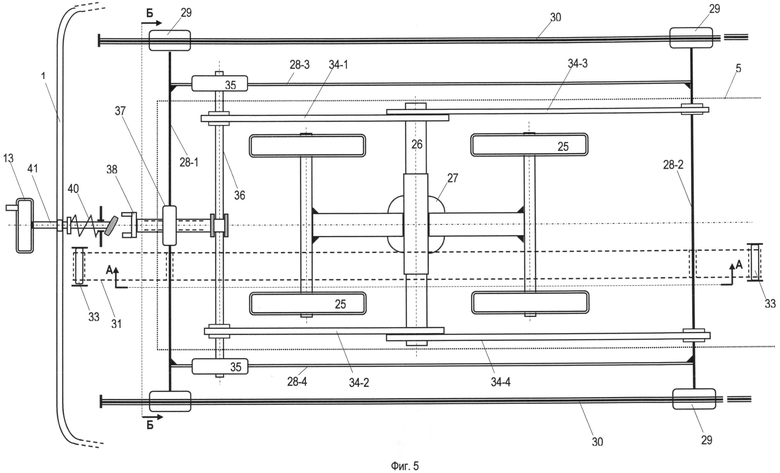
Узел 20 перемещения выполнен в виде нижней тележки 28, ролики 29 которого установлены на направляющих 30 с сечением С-образной формы, прикрепленных к кушетке снизу (фиг.7), и снабжен зубчатым ремнем 31, концы которого соединены с поперечными участками 28-1 и 28-2 нижней тележки 28 и электроприводом 32. Данный ремень 31 размещен на двух зубчатых шкивах 33, установленных на кушетке снизу, и предназначен для обеспечения гибкой кинематической связи между нижней тележкой 28 и электроприводом 32 (фиг.9).
Узел 19 поджатия установлен на нижней тележке 28 и выполнен в виде четырехзвенного шарнирно-рычажного подъемного механизма, одни концы всех звеньев 34 которого шарнирно соединены с центральной осью 26 верхней тележки 24, другие концы первого 34-1 и второго 34-2 звеньев снабжены роликами 35, установленными на продольных участках 28-3 и 28-4 нижней тележки 28 и имеющими общую ось 36, а другие концы третьего 34-3 и четвертого 34-4 звеньев шарнирно соединены с задним поперечным участком 28-2 нижней тележки 28 (фиг.5).
Узел 19 поджатия снабжен также механизмом регулировки высоты роликов-массажеров 25, состоящим из гайки 37, закрепленной на переднем участке 28-1 нижней тележки 28, вилки 38, шарнирно соединенной с четырехзвенным шарнирно-рычажным механизмом и снабженной резьбовым участком 39, находящимся в зацеплении с указанной гайкой 37, возвратной пружины 40 (фиг.3, 5) и нажимного вала 41 с рукояткой 13, установленного на корпусе 1 и выполненного с возможностью зацепления с вилкой 38.
Шарнирность соединения между вилкой 38 и четырехзвенным шарнирно-рычажным механизмом обеспечивается благодаря двум дискам 42, закрепленным соосно и жестко на вилке 38 (фиг.3,6,8). Вилка 38 может свободно проворачиваться вокруг своей продольной оси, не теряя при этом механической связи с общей осью 36 роликов 35.
Ограничитель 23 перемещений выполнен на основе левого 43-1 и правого 43-2 сигнализаторов крайнего положения и поперечного кронштейна 44, закрепленного на нижней тележке 28 (рис.2,4).
Под корпусом 1 размещены узел 45 наклона (фиг.2), датчик 46 угла наклона и опорная рама 47 (фиг.10). При этом корпус 1 закреплен на опорной раме 47 и снабжен парой опор 48 C-образной формы, жестко соединенных между собой двумя верхними 49, 50 и одной нижней 51 перемычками.
Узел 45 наклона образует подъемник, снабженный электроприводом 52, первый и второй концы которого шарнирно соединены соответственно с опорной рамой 47 и нижней перемычкой 51 (фиг.10).
Электропривод 52 (фиг.11) образован электродвигателем 53 постоянного тока, червячным механизмом и механизмом «винт-гайка». Червячный механизм состоит из червяка 54, соединенного соосно с валом 55 и находящегося в зацеплении с ним червячного колеса 56. Механизм «винт-гайка» состоит из гайки 57, размещенной на направляющих 58, и винта 59, который находится в зацеплении с данной гайкой 57 и жестко соединен с червячным колесом 56. Последняя жестко соединена со втулкой 60.
Датчик 46 угла наклона (фиг.2) встроен в электропривод 52 и выполнен на основе элемента Холла, причем полупроводниковый преобразователь 61 элемента Холла установлен на основании (статоре) электродвигателя 53, а его постоянный магнит 62 - на валу 55 данного электродвигателя (фиг.11).
Входы программного блока 22 подключены к электрическим выходам датчика 46 угла наклона и сигнализаторов 43-1 и 43-2 крайнего положения, а его выходы - к нагревательному элементу 8 и электроприводу 32 узла 20 перемещения, электроприводу 52 узла 45 наклона и электровибратору 27 (фиг.2.).
Устройство может быть снабжено дополнительно аварийной кнопкой 63 пациента и звуковым сигнализатором 64, подключенными к программному блоку 22, а также стопором 65 перемещения подвижной секции 3 кушетки (фиг.1).
Назначение и функции конструктивных элементов устройства
Корпус 1 является основным несущим и связующим конструктивным элементом устройства, главным назначением которого является обеспечение его жесткости и устойчивости при выполнении лечебных процедур, защита его «внутренностей» от механических повреждений.
Кушетка предназначена для непосредственного размещения на ней пациента 6 во время выполнения процедур. При этом подвижность ее секции 3 снижает трение между телом пациента 6 и кушеткой при выполнении процедуры вытяжения позвоночника.
Накидка 7 предназначена для исключения непосредственного контакта роликов-массажеров 25 со спиной пациента.
Нагревательные элементы 8 вшиты в накидку 7 и обеспечивают повышение эффективности механического массажа путем подогрева мышц и связок спины пациента при выполнении лечебных процедур.
Элементы 9 фиксации (петля Глиссона 9-1 и грудной пояс 9-2) вместе с гибкими связями 10 предназначены для приложения усилий вытяжения к соответствующим участкам тела пациента.
Боковые поручни 11 могут быть использованы при переноске (перемещении) устройства. Кроме того, пациент может держаться за них руками при размещении на кушетке, во время выполнения процедур и при вставании с кушетки.
Передний поручень 12 предназначен для закрепления на нем концов гибких связей 10 при выполнении процедур вытяжения.
Выносной пульт 14 управления предназначен для задания режимов работы устройства при выполнении процедур.
Узел 18 предназначен для обеспечения непосредственного механического массажного воздействия на тело пациента.
Узел 19, реализующий функцию домкрата, обеспечивает необходимое прижатие роликов-массажеров 25 к спине пациента. Регулировка усилия поджатия осуществляется с помощью рукоятки 13.
Узел 20 предназначен для формирования продольных возвратно-поступательных перемещений верхней тележки 24 при выполнении процедуры массажа.
Блок 21 обеспечивает формирование необходимых уровней напряжения для электрической схемы устройства.
Блок 22 предназначен для хранения и реализации записанных в нем программ лечебных процедур.
Ограничитель 23 предназначен для остановки и изменения направления перемещения нижней тележки 28. Используемые при этом сигнализаторы 43-1 и 43-2 крайнего положения могут быть реализованы на основе элементов Холла.
Электровибратор 27 предназначен для формирования вибрационных колебаний роликов-массажеров 25.
Продольные участки 28-3 и 28-4 нижней тележки 28 служат направляющими для роликов 35 (фиг.7).
Узел 45 предназначен для формирования дозированной гравитационной силы вытяжения позвоночника путем наклона (поворота) корпуса 1.
С-образные опоры 48 предназначены для обеспечения устойчивости корпуса 1 на полу во время выполнения процедур (фиг.1).
Червячный механизм, состоящий из червяка 54 и червячного колеса 56, выполняет функцию понижающего (обороты) редуктора.
Направляющие 58 предназначены для исключения проворота гайки 57 вокруг своей оси во время работы электропривода 52 (фиг.11).
Механизм, состоящий из винта 59 и гайки 57, выполняет функцию механического преобразователя вращательного движения вала 55 в поступательное перемещение втулки 60.
Выносная аварийная кнопка 63 пациента предназначена для экстренной остановки работы устройства.
Звуковой сигнализатор 64 предназначен для звукового информирования медперсонала и пациента о работе устройства. Конструктивно он может быть размещен на печатных платах программного блока 22 или пульта 14 управления.
Стопор 65 предназначен для блокировки перемещения подвижной секции 3 во время размещения пациента на кушетке.
Описание устройства (в динамике)
Устройство позволяет реализовать следующие процедуры:
- механический (вибромеханический) массаж околопозвоночных мышц и связок;
- вытяжение шейного отдела позвоночника (ШОП);
- вытяжение грудного отдела позвоночника (ГОП);
- процедура «ручной массаж» или «мануальная терапия».
Указанные процедуры проводятся в несколько этапов:
- подготовка устройства к процедуре;
- подготовка пациента к процедуре;
- ввод параметров процедуры;
- непосредственное выполнение процедуры;
- послепроцедурные мероприятия.
Подготовка устройства к процедуре
Перед выполнением процедур:
- устройство должно устойчиво стоять на ровной горизонтальной поверхности (пола),
- подвижная секция 3 кушетки должна быть заблокирована от перемещения стопором 65.
Подготовка пациента к процедуре
Желательно, чтобы перед выполнением процедур пациент 6 был одет в легкий спортивный костюм. С помощью, например, напольного измерителя веса (не показан) определяется вес Рт тела пациента. Далее оператор помогает пациенту правильно разместиться на кушетке. При этом пациент ложится спиной вниз так, чтобы:
- линия его позвоночника совпадала с продольной осью кушетки,
- массажируемая зона спины пациента размещалась над прорезью 5.
По просьбе пациента под его голову оператор может подложить подголовник, а под колени - подколенник (фиг.15-2). В качестве подголовника (подколенника) может быть использовано, в частности, сложенное в рулон полотенце.
После этого оператор вставляет вилку 16 в розетку 66 (фиг.4) и, нажимая на кнопочный выключатель 17 «Сеть», включает электропитание устройства.
Ввод параметров процедуры (массажа)
По завершении изучения предписания лечащего врача оператор записывает через пульт 14 в блок 22 программу лечения. Такая программа может включать в себя, в частности:
- дату проведения процедуры и ФИО пациента;
- уровень обогрева;
- уровень вибрации роликов-массажеров 25;
- длительность процедуры;
- другие данные.
Далее оператор, нажимая на рукоятку 13, вводит вал 41 в зацепление с вилкой 38 и начинает вращать рукоятку 13 по часовой или против часовой стрелки, что приводит к сближению или удалению оси 36 от заднего поперечного участка 28-2 нижней тележки 28.
В результате все звенья 34 начинают вращаться на своих шарнирах вокруг оси 36 и участка 28-2, а ролики 35 - прокатываться также по направляющим 28-3 и 28-4. В итоге верхняя тележка 24 поднимается (опускается), устанавливая тем самым необходимый уровень (высоту) роликов-массажеров 25, а следовательно, степень прижатия последних к спине пациента.
С отпусканием рукоятки 13 вал 41 под действием пружины 40 выходит из зацепления с вилкой 38.
Далее он вручает пациенту аварийную кнопку 63 и, нажимая на кнопки «Массаж» или «Вибромассаж» (не показаны) на пульте 14, запускает в устройстве данную лечебную процедуру.
Процедура «механический (вибромеханический) массаж околопозвоночных мышц и связок»
С нажатием кнопок «Массаж» или «Вибромассаж» блок 34 включает нагревательный элемент 8, электропривод 32 и не запускает/запускает электровибратор 27, что сопровождается двухкратным звуковым сигналом сигнализатора 64. Электропривод 32 через шкивы 33 и зубчатый ремень 31 приводит в движение нижнюю тележку 28, которая, в свою очередь, через звенья 34 начинает перемещать верхнюю тележку 24. Ролики 25 последней, перекатываясь по спине пациента 6, осуществляют механический (вибромеханический) массаж его околопозвоночных мышц и связок.
В момент появления кронштейна 44, например, над сигнализатором 43-2, последний формирует сигнал, поступающий в программный блок 22, который воспринимает его как сигнал на переключение полярности питающего напряжения электропривода 32. Последний в результате этого начинает вращаться в обратном направлении, меняя тем самым направление перемещения верхней тележки 24.
Описанное выше изменение направления перемещения верхней тележки 24 осуществляется аналогичным образом, когда кронштейн 44 появляется над сигнализатором 43-1.
Таким образом, осуществляя возвратно-поступательное перемещение, ролики-массажеры 25 проводят продольный механический (вибро)массаж спины пациента. Во время такого массажа в результате изменения межпозвонкового расстояния имеет место микровытяжение локальных участков позвоночника. Под влиянием массажных воздействий происходит некоторое растяжение позвоночника, его выравнивание и выпрямление, исчезновение ущемления (сдавливания) нервных окончаний, расположенных возле позвонков, снимается мышечный спазм, восстанавливается нормальная подвижность позвонков, улучшается проводимость нервных импульсов к мышцам, внутренним органам и тканям.
Кроме того, во время массажа каждый позвонок позвоночника совершает локальные перемещения в сагиттальной плоскости. Работа электровибратора 27 накладывает дополнительно на такие движения позвонков вибрационные колебания. В результате позвонки осуществляют более сложные периодические «вибромассажные» колебания.
Если в процессе проведения процедуры возникает необходимость в экстренной остановке работы устройства, пациенту достаточно нажать на кнопку 63. При этом автоматически прекращается перемещение верхней тележки 24 и отключается нагревательный элемент 8, а сигнализатор 64 формирует многократный звуковой сигнал.
Если же во время массажа установленное время данной процедуры истекло, программный блок 22 также производит автоматический останов электропривода 32, вибратора 27, отключает нагревательный элемент 8 и включает сигнализатор 64, формирующий однократный звуковой сигнал.
Примечание. Регулировка уровня подъема роликов-масажеров 25 проводится только при неподвижной нижней тележке 28, причем находящейся в крайнем левом положении (у головного участка кушетки). Программа в блоке 22 работает таким образом, что такое положение тележки 28 обеспечивается тем, что сигнал на отключение проходит на электропривод 32 только с появлением очередного сигнала с левого сигнализатора 43-2.
Примечание. Процедуру (вибро)механического массажа рекомендуется начинать с минимального уровня подъема роликов-массажеров 25, постепенно увеличивая степень их прижатия к спине пациента при последующих процедурах.
Далее следуют послепроцедурные мероприятия, описанные ниже.
Процедура «вытяжение шейного отдела позвоночника (ШОП)»
Все лечебные процедуры вытяжения в устройстве могут проводиться двумя методами. По первому методу нагрузка на позвоночник в течение одного сеанса возрастает во время процедуры и снижается к ее концу («постоянный» режим). По второму методу нагрузка периодически возрастает и снижается в течение одного проводимого сеанса («переменный» режим). Конкретный метод вытяжения выбирает лечащий врач.
С помощью, например, напольного измерителя веса (не показан) оператор измеряет вес Рт тела пациента. После этого пациент размещается на кушетке. Далее на его голову надевается элемент фиксации, выполненный, например, в виде петли 9-1 Глиссона, которая с помощью с гибких связей 10 соединяется с передним поручнем 12 (фиг.2).
По завершении изучения предписания лечащего врача оператор записывает через пульт 14 в блок 22 программу лечения ШОП. Такая программа может включать в себя, в частности, следующие данные:
- ФИО пациента;
- дата проведения процедуры;
- наименование процедуры;
- уровень обогрева;
- программа изменения силы вытяжения ШОП в течение одного сеанса лечения;
- другие данные.
Подготовка к процедуре завершается разблокировкой стопора 65 подвижной секция 3 кушетки и вручением пациенту аварийной кнопки 63.
Далее, нажимая на кнопку «Вытяжение» на пульте 14, оператор запускает в установке лечебную процедуру «вытяжение», что сопровождается двухкратным звуковым сигналом сигнализатора 64.
По сигналу «Вытяжение» программный блок 22 включает нагревательный элемент 8 и запускает электропривод 52 наклона (фиг.10). Вращение его ротора 55 через червяк 54 и червячное колесо 56 передается на винт 59. Вращение последнего преобразуется в поступательное перемещение гайки 57 вместе с втулкой 60, которая, выдвигаясь из привода 52, толкает опорную раму 47 и наклоняет тем самым (поворачивает по часовой стрелке) корпус 1.
При этом тело пациента воздействует на кушетку, в результате чего вертикально (вниз) направленный его вес Рт раскладывается на две составляющие: нормальную силу Fд давления на поверхность кушетки и силу Fв. вытяжения ШОП, действующую вдоль данной поверхности (фиг.12). В связи с тем, что секция 3 выполнена подвижной, величина коэффициента трения между телом и кушеткой близка к «1» и сила вытяжения ШОП будет пропорциональна углу α наклона корпуса:

Измерение угла α в устройстве происходит с помощью датчика 46 угла наклона, выполненного на основе элемента Холла. При каждом обороте вала 55 привода 52 постоянный магнит 62 наводит на полупроводниковом преобразователе 61 элемента Холла электрический, импульс, который подсчитывается блоком 22. При этом количество подсчитанных импульсов оказывается пропорциональным соответствующему углу α.
На основе формулы (1) могут быть заранее подсчитаны силы Fв вытяжения для различных значений Рт и α (фиг.13). Например, это может быть сделано для весов Рт тела в диапазоне 40-100 кг через каждые 5 кг, а для углов α наклона в диапазоне 0°-60° через каждые 5° или 10°. На пересечении строк и столбцов таблицы (фиг.13) записываются соответствующие значения сил Fв. вытяжения. Эти значения могут служить ориентирами при составлении программы вытяжения ШОП.
Если в процессе проведения процедуры возникает необходимость в экстренной остановке работы устройства, пациенту достаточно нажать на кнопку 63. При этом автоматически прекращается работа электропривода 52 и отключается нагревательный элемент 8, а сигнализатор 64 формирует многократный звуковой сигнал.
По истечении времени процедуры вытяжения ШОП программный блок 22 также производит останов электропривода 52 (с автоматическим возвратом нижней тележки 28 в ее исходное «левое» положение), отключает нагревательный элемент 8 и включает сигнализатор 64, формирующий однократный звуковой сигнал.
Далее следуют послепроцедурные мероприятия, описанные ниже.
Процедура «вытяжение грудного отдела позвоночника (ГОП)»
Выполнение данной процедуры практически не отличается от выполнения процедуры вытяжения ШОП. Элемент фиксации (грудной пояс 9-2) размещается на груди пациента на уровне подмышечных впадин. Он с помощью с гибких связей 10 соединяется с передним поручнем 12.
По завершении изучения предписания лечащего врача оператор записывает через пульт 14 в блок 22 программу лечения ГОП. Такая программа может включать в себя, в частности, следующие данные:
- ФИО пациента;
- дата проведения процедуры;
- наименование процедуры;
- уровень обогрева;
- программа изменения силы вытяжения ГОП в течение одного сеанса лечения;
- другие данные.
Далее, нажимая на кнопку «Вытяжение» на пульте 14, оператор запускает в устройстве лечебную процедуру «вытяжение», что сопровождается двухкратным звуковым сигналом сигнализатора 64.
В этом случае величина силы вытяжения ГОП также будет пропорциональна углу α наклона корпуса 1 и определяться формулой (1).
Дальнейшая работа установки аналогична ее работе при вытяжении ШОП.
Если в процессе проведения процедуры возникает необходимость в экстренной остановке работы устройства, пациенту 6 достаточно нажать на кнопку 63. При этом автоматически прекращается работа электропривода 52 и отключаются нагревательный элемент 8, а сигнализатор 64 формирует многократный звуковой сигнал.
По истечении времени процедуры вытяжения ГОП программный блок 22 также производит останов электропривода 52 (с автоматическим возвратом нижней тележки 28 в ее исходное «левое» положение), отключает нагревательный элемент 8 и включает сигнализатор 64, формирующий однократный звуковой сигнал.
Описанные выше процедуры вытяжения ШОП и ГОП могут совмещаться во времени с описанной выше процедурой массажа (совмещенные процедуры).
Работа в режиме «ручной массаж» или «мануальная терапия»
Данная процедура предназначена для выполнения оператором ручного массажа или мануальной терапии.
Исходное положение корпуса 1 (кушетки) - горизонтальное. Обычно пациент ложится на кушетку лицом вниз. Далее оператор наклоняет корпус 1 вместе с пациентом на некоторый (удобный ему) угол, после чего начинается непосредственное выполнение процедуры ручного массажа или мануальной терапии.
В процессе выполнении данной процедуры оператор может, при необходимости, с помощью пульта 14 оперативно менять угол наклона корпуса 1.
Послепроцедурные мероприятия
Послепроцедурные мероприятия начинаются с осмотра пациента лечащим врачом. После этого пациента отправляют в комнату отдыха для 15-20-минутного послепроцедурного покоя и закрепления тем самым достигнутого эффекта массажа и растяжения позвонковых дисков, высвобождения нервных окончаний.
В ряде случаев целесообразно провести дополнительно релаксационный массаж с элементами пассивной гимнастики, медикаментозную терапию, физиотерапию и др., что определяется лечащим врачом.
Достигаемые результаты
У прототипа такие его конструктивные элементы, как электропривод узла наклона, опорная рама и датчик угла наклона, размещены внутри корпуса.
У заявляемого устройства они выведены за корпус 1 и установлены под ним. Благодаря этому центр его тяжести (во время выполнения процедур) существенно ниже, чем у прототипа, что повышает устойчивость устройства. Кроме того, облегчается доступ к узлу наклона, достигается удобство его эксплуатации.
У прототипа корпус размещен одним концом на неподвижных, например резиновых, опорах, а другим концом - на опорной раме, шарнирно соединенной с корпусом и снабженной роликами перемещения. Конструкция устройства такова, что в процессе наклона корпуса ролики опорной рамы прокатываются по полу в направлении неподвижных опор (справа) или наоборот. В результате неровности пола отражаются на его устойчивости. Кроме того, постоянно прокатываясь по одному и тому же участку пола, данные ролики часто портят покрытие пола (отзывы от пользователей прототипа).
Кроме того, размещение корпуса на нежестких опорах (подвижных роликах и резиновых элементах) снижает устойчивость устройства при выполнении процедур.
У заявляемого устройства корпус закреплен на опорной раме и снабжен парой С-образных опор 48, жестко соединенных между собой перемычками. При этом в процессе вытяжения данные опоры не перемещаются (остаются неподвижными).
В результате данное устройство отличается простотой и жесткостью конструкции узла наклона, устойчивостью при выполнении процедур, что создает для пациента дополнительно более комфортные, благоприятные условия.
Благодаря стопору 65 в устройстве имеется возможность блокировки подвижности секции 3 и обеспечения тем самым удобства при размещении пациента на кушетке.
Выполнение датчика 46 угла наклона встроенным в электропривод 52 существенно упрощает конструкцию узла 45 наклона, облегчает его ремонт и эксплуатацию.
Наличие выносного пульта 14 управления облегчает оператору ввод параметров процедур.
Устройство в целом существенно облегчает труд врача, оператора (медсестры).
Соответствие условию патентоспособности «промышленная применимость»
По мнению заявителя, сведения, приведенные в описании, достаточны для осуществления устройства. Такое устройство для массажа и вытяжения позвоночника не вызывает затруднений при его реализации. Заявителем изготовлен опытный экземпляр заявляемого устройства (фиг.14).
Совокупность существенных признаков, характеризующих сущность изобретения, в принципе может быть многократно использована.
Таким образом, вышеизложенные сведения свидетельствуют для заявленного изобретения, как оно охарактеризовано в независимом пункте формулы, о возможности его осуществления с помощью известных методов и средств.
Изобретение может найти применение в лечебно-профилактических и санаторно-курортных медицинских учреждениях широкого профиля для массажа и постоянного или периодического вытяжения позвоночника (механический массаж и тракционная терапия). Оно пригодно для эксплуатации в условиях практически любого медучреждения, профилактория, санатория.
Указанное позволяет сделать вывод о соответствии изобретения условию патентоспособности «промышленная применимость» по действующему законодательству.
В заключение следует отметить, что вышеизложенные сведения свидетельствуют также о том, что заявляемое изобретение отвечает всем требуемым критериям (условиям) патентоспособности и обладает при этом значительными преимуществами по сравнению с известными аналогами.
Источники информации
1. Авторское свидетельство СССР №709084. Устройство для вытяжения позвоночника. МПК A61F 5/04.
2. Авторское свидетельство СССР №770494. Устройство для вытяжения позвоночника. МПК A61H 1/02.
3. Патент РФ №2026051 на изобретение «Устройство для механизированного массажа». МПК A61H 1/02, A61H 15/00.
4. Патент РФ №50412 на полезную модель «Устройство массажа и вытяжения позвоночника». МПК A61H 1/00.
5. Патент РФ №2262915 на изобретение «Устройство для массажа и вытяжения позвоночника. МПК A61H 1/02 (прототип).
6. Автомобильные электронагреватели ТермоСофт. Журнал «Автомобильный Екатеринбург». №47, 2003 год.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА ДЛЯ МАССАЖА И ГРАВИТАЦИОННОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2012 |
|
RU2512959C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2007 |
|
RU2336069C1 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2008 |
|
RU2386428C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2262915C1 |
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2006 |
|
RU2320165C1 |
| Тренажер для растяжения соединений костей ног и позвоночника человека | 2020 |
|
RU2773794C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2005 |
|
RU2275941C1 |
| СПОСОБ ЛЕЧЕНИЯ ЗАБОЛЕВАНИЙ ПОЗВОНОЧНИКА | 2006 |
|
RU2308257C1 |
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЗИРОВАННОГО МАССАЖА ПОЗВОНОЧНИКА | 2013 |
|
RU2549674C1 |

Изобретение относится к медицинской технике, а более конкретно - к средствам для лечебного механического воздействия на позвоночник. Устройство для массажа и вытяжения позвоночника содержит полый корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена элементами фиксации, гибкими связями и нагревательным элементом, размещенные внутри корпуса узлы массажа, поджатия, перемещения, наклона и датчик угла наклона, а также программный блок и опорную раму. Кушетка образована неподвижной и подвижной секциями. В неподвижной секции выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой. Подвижная секция выполнена с возможностью продольного возвратно-поступательного перемещения по направляющим. Узел массажа выполнен в виде верхней тележки, снабженной роликами-массажерами и электровибратором. Узел перемещения выполнен в виде нижней тележки и снабжен электроприводом. Узел поджатия установлен на нижней тележке и выполнен в виде подъемного механизма, шарнирно соединенного с верхней тележкой. Узел наклона снабжен электроприводом, первый конец которого шарнирно соединен с опорной рамой. Входы программного блока подключены к выходу датчика угла наклона, а его выходы - к нагревательному элементу, электровибратору и электроприводам узлов перемещения и наклона. Узел наклона и датчик угла наклона размещены под корпусом. Корпус закреплен на опорной раме и снабжен парой С-образных опор, жестко соединенных между собой двумя верхними перемычками и одной нижней перемычкой, шарнирно соединенной со вторым концом электропривода узла наклона. Узел перемещения снабжен также ремнем, размещенным на двух шкивах и обеспечивающим гибкую кинематическую связь между нижней тележкой и электроприводом данного узла. Нижняя тележка выполнена в виде рамы с продольными и поперечными участками и снабжена роликами, установленными на направляющих С-образного сечения, прикрепленных к кушетке снизу,
а также ограничителем перемещений, состоящим из жестко соединенного с ней поперечного кронштейна и прикрепленных к кушетке двух сигнализаторов крайнего положения, электрические выходы которых подключены к входам программного блока. Узел поджатия выполнен в виде четырехзвенного шарнирно-рычажного механизма, одни концы всех звеньев которого шарнирно соединены с верхней тележкой, другие концы первого и второго звеньев снабжены роликами, установленными на боковых участках нижней тележки, а другие концы третьего и четвертого звеньев шарнирно связаны с задним участком нижней тележки. Узел поджатия снабжен также механизмом регулировки высоты роликов-массажеров, состоящим из гайки, закрепленной на переднем участке нижней тележки, вилки, шарнирно соединенной с четырехзвенным шарнирно-рычажным механизмом и снабженной резьбовым участком, находящимся в зацеплении с указанной гайкой, и нажимного вала с рукояткой, установленного на корпусе и выполненного с возможностью зацепления с данной вилкой. Подвижная секция кушетки снабжена стопором перемещения, а датчик угла наклона выполнен в виде элемента Холла, встроенного в электропривод узла наклона. Изобретение позволяет повысить жесткость и устойчивость устройства, а также обеспечение удобства его эксплуатации. 2 з.п. ф-лы, 15 ил.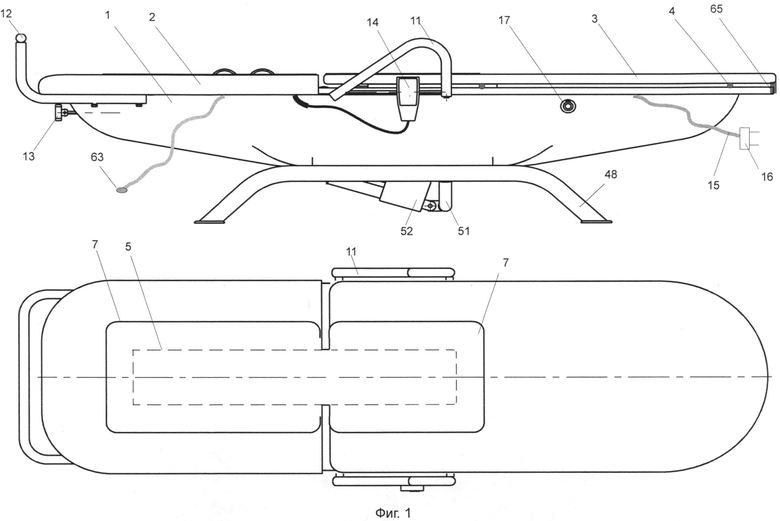
1. Устройство для массажа и вытяжения позвоночника, содержащее:
- полый корпус, рабочая поверхность которого выполнена в виде кушетки и снабжена элементами фиксации, гибкими связями и нагревательным элементом,
размещенные внутри корпуса:
- узлы массажа, поджатия, перемещения, наклона и датчик угла наклона, а также программный блок и опорную раму,
причем
- кушетка образована неподвижной и подвижной секциями, причем в неподвижной секции выполнена продольная прямоугольная прорезь, соответствующая расположению позвоночника пациента на кушетке и закрытая сверху накидкой, а подвижная секция выполнена с возможностью продольного возвратно-поступательного перемещения по направляющим,
- узел массажа выполнен в виде верхней тележки, снабженной роликами-массажерами и электровибратором,
- узел перемещения выполнен в виде нижней тележки и снабжен электроприводом,
- узел поджатия установлен на нижней тележке и выполнен в виде подъемного механизма, шарнирно соединенного с верхней тележкой,
- узел наклона снабжен электроприводом, первый конец которого шарнирно соединен с опорной рамой,
- входы программного блока подключены к выходу датчика угла наклона, а его выходы - к нагревательному элементу, электровибратору и электроприводам узлов перемещения и наклона, отличающееся тем, что
- узел наклона и датчик угла наклона размещены под корпусом,
- корпус закреплен на опорной раме и снабжен парой С-образных опор, жестко соединенных между собой двумя верхними перемычками и одной нижней перемычкой, шарнирно соединенной со вторым концом электропривода узла наклона,
- узел перемещения снабжен также ремнем, размещенным на двух шкивах и обеспечивающим гибкую кинематическую связь между нижней тележкой и электроприводом данного узла,
- нижняя тележка выполнена в виде рамы с продольными и поперечными участками и снабжена роликами, установленными на направляющих С-образного сечения, прикрепленных к кушетке снизу, а также ограничителем перемещений, состоящим из жестко соединенного с ней поперечного кронштейна и прикрепленных к кушетке двух сигнализаторов крайнего положения, электрические выходы которых подключены к входам программного блока,
- узел поджатия выполнен в виде четырехзвенного шарнирно-рычажного механизма, одни концы всех звеньев которого шарнирно соединены с верхней тележкой, другие концы первого и второго звеньев снабжены роликами, установленными на боковых участках нижней тележки, а другие концы третьего и четвертого звеньев шарнирно связаны с задним участком нижней тележки,
при этом
- узел поджатия снабжен также механизмом регулировки высоты роликов-массажеров, состоящим из гайки, закрепленной на переднем участке нижней тележки, вилки, шарнирно соединенной с четырехзвенным шарнирно-рычажным механизмом и снабженной резьбовым участком, находящимся в зацеплении с указанной гайкой, и нажимного вала с рукояткой, установленного на корпусе и выполненного с возможностью зацепления с данной вилкой.
2. Устройство по п.1, отличающееся тем, что подвижная секция кушетки снабжена стопором перемещения.
3. Устройство по п.1, отличающееся тем, что датчик угла наклона выполнен в виде элемента Холла, встроенного в электропривод узла наклона.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| WO 03059216 A1, 24.07.2003 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 4995378 A, 26.02.1991 | |||

