Настоящее изобретение относится к системе и процессу автоматического управления полетом аэродинамических поверхностей силового крыла, в частности для оптимизации генерирования электроэнергии посредством полета аэродинамических поверхностей силового крыла, подключенных к системе "карусельного" типа.
Как известно, имеется обширная литература и значительное число технических решений, связанных с автоматическим управлением в полете автономных воздушных судов (UAV). Как известно, возможность того, что человек управляет полетом аэродинамической поверхности крыла, такого как, к примеру, воздушный змей, главным образом появляется из оценки за счет видения положения и ориентации аэродинамической поверхности крыла в пространстве, что предоставляет набор данных восприятия, которые обеспечивают возможность корректирования маневра тросов тяги. Автоматизация маневра аэродинамических поверхностей крыла неизбежно проходит посредством точного воспроизведения этой человеческой чувствительности.
Тем не менее, справочные материалы и литература, относящаяся к данному уровню техники, не показывают решений или исследований, которые обращены на автоматическое управление полетом аэродинамических поверхностей силового крыла, в частности, реализованных как "силовой воздушный змей". Фактически предполагается, что проблемы этого надлежащего управления являются множественными и сложными, так, что требуют наиболее подходящего применения самых передовых методологий и алгоритмов управления. Полет аэродинамической поверхности силового крыла и его моделирование, фактически, обращено на использование нелинейных систем со многими переменными, при этом спецификации функций управления должны анализироваться с использованием надлежащих требований по надежности относительно параметрических изменений и динамики, которая не может моделироваться с достаточной точностью. В зависимости от таких характеристик система управления также может обеспечивать функциональность точного определения управления, спроектированную на виртуальном прототипе с использованием экспериментальных измерений реальной системы при ее реализации. Проблемы, сформулированные для управления реальными системами посредством аппроксимации математических моделей системы, используемых для проектирования системы управления, всегда принимались во внимание исследователями в данной области техники исходя из главных трудов Найквиста и Боде. Тем не менее, только начиная с 70-80-х годов появилось соответствующее развитие результатов, позволяющее систематически и количественно обращаться к эффекту неопределенности моделей, используемых для анализа и синтеза систем управления, что привело к обширному развитию области робастного управления. Поскольку эти методологии могут быть использованы для разрешения значительной части действительных проблем, необходимо, чтобы такие характеристики получались посредством надлежащих способов идентификации, которые оперируют измерениями, выполняемыми в реальной системе, которая должна управляться, называемых в ссылочной литературе робастной идентификацией, ориентированной на управление идентификацией или идентификацией по принадлежности множеству. Эти аспекты были преимущественно рассмотрены в следующих работах:
Horowitz, "Synthesis of Feedback Control Systems", Academic Press, 1963;
Menga G., Milanese M., Negro A., "Min-max quadratic cost control of systems described by approximate models", IEEE Trans. Aut. Contr, 1976;
J.C. Doyle, "Guaranteed margins for LQG regulators", IEEE Trans. Aut. Contr, 1978;
V.L. Kharitonov, "Asymptotic stability of an equilibrium position of a family of systems of linear differential equations", Differential Equations, 1979;
G. Zames, "Feedback and optimal sensitivity", IEEE Trans. Aut. Contr, 1981-1982;
H. Kimura, "Robust stabilizability for a class of transfer functions", IEEE Trans. Aut. Contr, 1984;
J.C. Doyle, K. Glover, P.P. Khargonekar, B.A. Francis, "State space solution to standard H-2 and H-inf control problems", IEEE Trans. Aut. Contr, 1989;
S.P. Bhattacharyya, H. Chapellat, L.H. Keel, "Robust Control: The Parametric Approach", Prentice Hall, 1995;
K. Zhou, J. C. Doyle, K. Glover, "Robust and Optimal Control", Prentice Hall, 1996;
M. Milanese, R. Tempo, A. Vicino (Eds), "Robustness in Identification and Control", Plenum, London, 1989;
IEEE Trans, on Aut. Contr., "Special Issue on System Identification for Robust Control Design", 1992;
A.B. Kurzhanski, V.M. Veliov (Eds), "Modeling Techniques for Uncertain Systems", Birkhauser, 1994;
B. Ninness and G. C. Goodwin, "Estimation of model quality", Automatica, 1995;
M. Milanese, J. Norton, H. Piet-Lahanier, E. Walter (Eds), "Bounding Approaches to System Identification", Plenum Press, 1996;
J. R. Partington, "Interpolation, Identification, and Sampling", Clarendon Press, 1997;
H. Kimura, M. Milanese (Org.), Invited Session "Model Set Theory in Identification and Control", 38th IEEE CDC, Phoenix, 1999;
J. Chen, G. Gu, "Control-oriented system identification: an H-infinity approach", John Wiley, 2000;
Int. J. of Robust and Nonlinear Control, Special Issue on "Robust control from data", M. Milanese, M. Taragna Eds., 2004.
В дополнение к вышеупомянутым статьям и книгам, вклады на международном уровне в развитие инновационных методик и алгоритмов по робастной идентификации и тематики управления задокументированы в дополнительной международной литературе; в частности, способы идентификации аппроксимируемых моделей сложных линейных и нелинейных систем рассмотрены в:
M. Milanese, G. Belforte: "Estimation theory and uncertainty intervals evaluation in presence of unknown but bounded errors: linear families of model and estimators", IEEE Transactions on Automatic Control, vol. 27, n. 2, April 1982;
M. Milanese, R. Tempo: "Optimal Algorithms Theory for robust estimation and prediction", IEEE Trans. AC, August 1985;
B.Z. Kacewicz, M. Milanese, A. Vicino: "Conditionally optimal algorithms and estimation of reduced order models" Invited paper 2nd Int. Symposium on Optimal Algorithms, New York, 1987. Also Journal of Complexity ol. 4, pp. 73-85, 1988;
M. Milanese, A. Vicino, "Optimal estimation theory for dynamic systems with set membership uncertainty: an overview", Automatica, vol. 27, 997-1009, 1991;
L. Giarre, B. Z. Kacewicz, M. Milanese, "Model quality evaluation in set membership identification", Automatica, vol. 33, no. 6, pp. 1133-1139, 1997;
M. Milanese, M. Taragna, "Optimality, approximation, and complexity in Set Membership H-inf identification", IEEE Transactions on Automatic Control, vol. AC-47(10), pp. 1682-1690,2002;
M. Milanese, C. Novara, "Set Membership Identification of Nonlinear Systems", Automatica, Vol. 40/6, pp. 957-975, 2004;
K. Hsu, M. Claassen, C. Novara, P. Khargonekar, M. Milanese, K. Poolla, "Non-Parametric Identification of Static Nonlinearities in a General Interconnected System", International Federation Automatic Control World Conference, Prague, 2005.
Робастное управление, начинающееся с экспериментальных данных, рассмотрено в:
M. Milanese, G. Fiorio, S. Malan, "Robust performances control design for a high accuracy calibration device", Automatica, Special Issue on Robust Control, vol. 29, pp. 147-156, 1993;
S. Malan, M. Milanese, D. Regruto and M. Taragna, "Robust control from data via uncertainty model sets identification", International Journal of Robust and Nonlinear Control, Special Issue on "Robust control from data", 2004.
Робастное управление в случаях, когда присутствуют насыщения с методиками предотвращения скручивания рассмотрено в:
M. Canale, M. Milanese, "Robust design of predictive controllers in presence of unmodeled dynamics", European Journal of Control, vol. 9, no. 5, 2003;
M. Canale, M. Milanese, Z. Ahmad, E. Matta, "An Improved Semi-Active Suspension Control Strategy Using Predictive Techniques", Proc. IEEE International Conference on Information & Communication Technologies, Damasco, 2004; and their applications to different application sectors are dealt with by:
M. Milanese, C. Novara, P. Gabrielli, L. Tenneriello, "Experimental Modelling of vertical dynamics of vehicles with controlled suspensions", SAE World Congress, Detroit, Michigan, 2004;
M. Milanese, C. Novara, "Set Membership Prediction of River Flow", Systems and Control Letters, Vol. 53/1, pp. 31-39, 2004;
A. Chiesa, "Tecniche di controllo Fault Tolerant per velivoli senza pilota (UAV)" Graduating Paper, responsible M. Milanese, Politecnico di Torino, 2004;
M. Milanese, C. Novara, L. Pivano, "Structured SM identification of vehicles vertical dynamics", Mathematical and Computer Modelling of Dynamical Systems (Special Issue), 2005.
Тем не менее, из того, что заявлялось выше, неизвестны системы и/или процессы для автоматического управления полетом аэродинамических поверхностей силового крыла, которые работают прогнозируемо, а именно в зависимости от наблюдения и предвидения будущих условий полета самих аэродинамических поверхностей крыла, и которые позволяют учитывать критические ситуации и ошибки, обусловленные прогнозированием.
Патентная заявка (Италия) номер TO2003A000945 и Патентная заявка (Европа) EP 04028646.0, которая притязает на приоритет заявителя, раскрывают систему для преобразования кинетической энергии ветровых потоков в электрическую энергию посредством прогнозируемого и адаптивного управления полетом аэродинамических поверхностей силового крыла, подключенных к системе "карусельного" типа. В такой системе должно быть желательным использование системы и процесса для автоматического управления полетом используемых аэродинамических поверхностей силового крыла, которые предоставляют возможность приведения в движение в реальном времени самих аэродинамических поверхностей крыла согласно режимам, описанным в вышеупомянутых заявках. Тем не менее, в предшествующем уровне техники не известны системы, которые предоставляют возможность управления полетом аэродинамических поверхностей крыла, эффективно используемых в системе "карусельного" типа.
Следовательно, цель настоящего изобретения заключается в разрешении проблем предшествующего уровня техники посредством предоставления системы и процесса автоматического управления полетом аэродинамических поверхностей силового крыла в прогнозируемом режиме согласно "предпочтительной стратегии управления" на основе наблюдения и предвидения будущих условий полета аэродинамических поверхностей крыла с учетом критических ситуаций и ошибок, обусловленных прогнозированием, позволяющей избегать локальных максимумов, колебаний и нестабильностей управления.
Другая цель настоящего изобретения заключается в предоставлении системы и процесса автоматического управления полетом аэродинамических поверхностей силового крыла, используемых в системе "карусельного" типа, описанной в Патентной заявке (Италия) номер TO2003A000945 и Патентной заявке (Европа) номер EP 04028646.0.
Вышеуказанные и другие цели и преимущества настоящего изобретения, очевидные из последующего описания, достигаются с помощью системы автоматического управления полетом аэродинамических поверхностей силового крыла по п. 1 формулы изобретения.
Более того, вышеуказанные и другие цели и преимущества настоящего изобретения достигаются с помощью процесса автоматического управления полетом аэродинамических поверхностей силового крыла по п. 27 формулы изобретения.
Предпочтительные варианты осуществления и нетривиальные варианты настоящего изобретения являются предметом зависимых пунктов формулы изобретения.
Настоящее изобретение должно быть лучше описано посредством некоторых его предпочтительных вариантов осуществления, предоставляемых в качестве неограничивающего примера, со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - это блок-схема, иллюстрирующая основные компоненты системы автоматического управления полетом аэродинамических поверхностей силового крыла согласно настоящему изобретению;
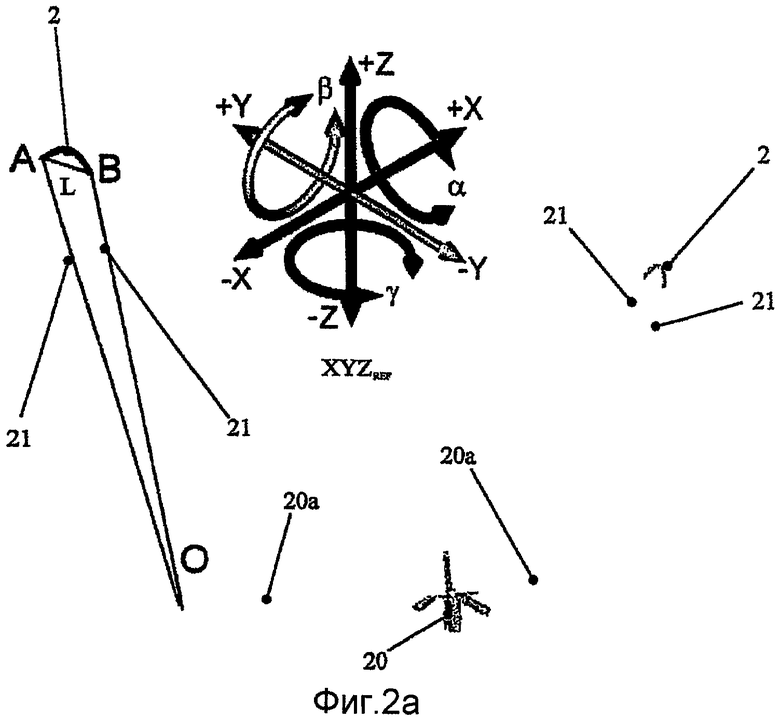
фиг.2a - это схема, показывающая эталонную систему, связанную с аэродинамической поверхностью силового крыла, ограниченную известной системой "карусельного" типа;
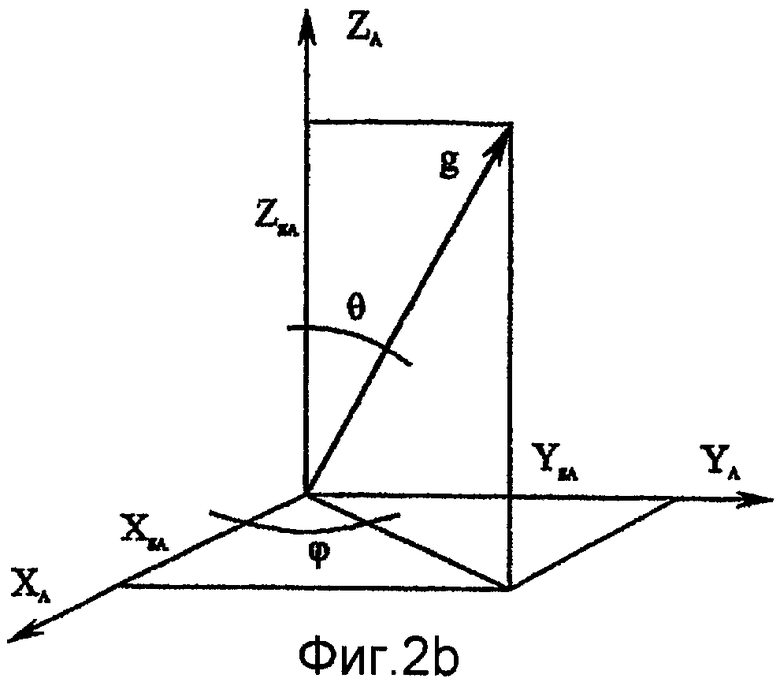
фиг.2b - это график, показывающий векторное разложение вектора, показывающего ускорение силы тяжести;
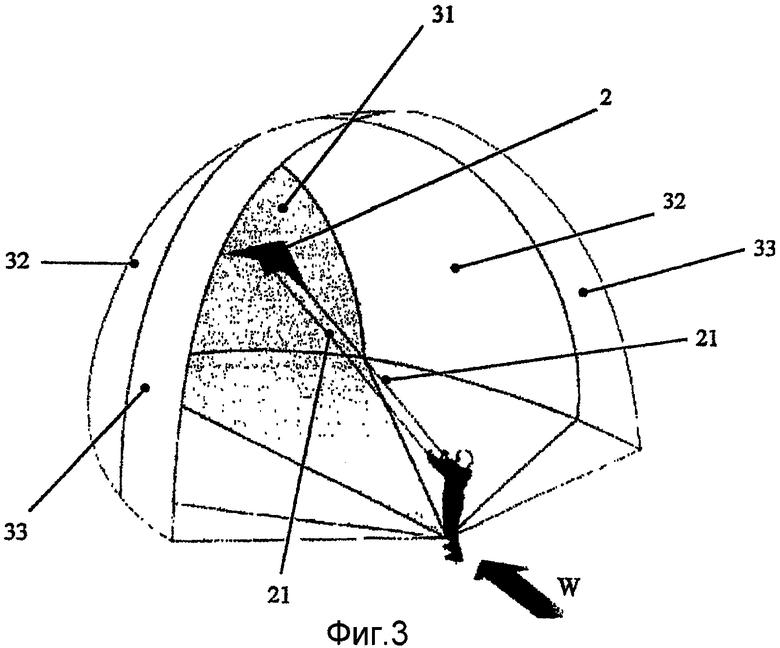
фиг.3 - это схема, показывающая область аэронавигации аэродинамической поверхности силового крыла относительно направления и ориентации ветрового потока;
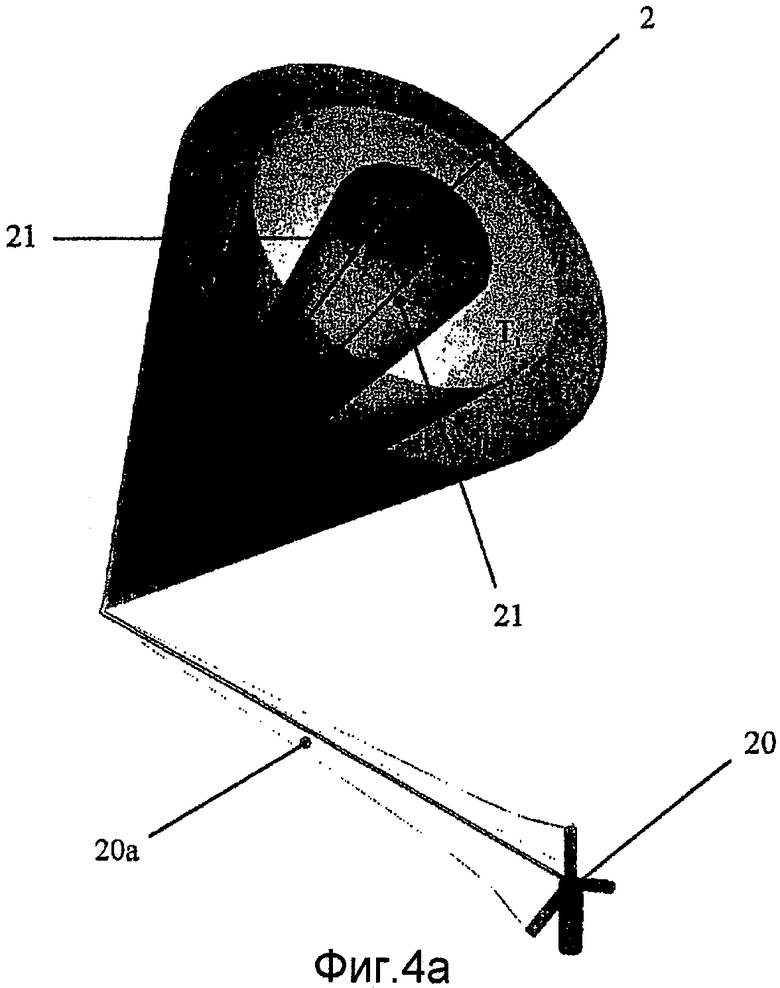
фиг.4a - это схема, показывающая трехмерную полетную цель аэродинамической поверхности силового крыла в соответствии с процессом согласно настоящему изобретению;
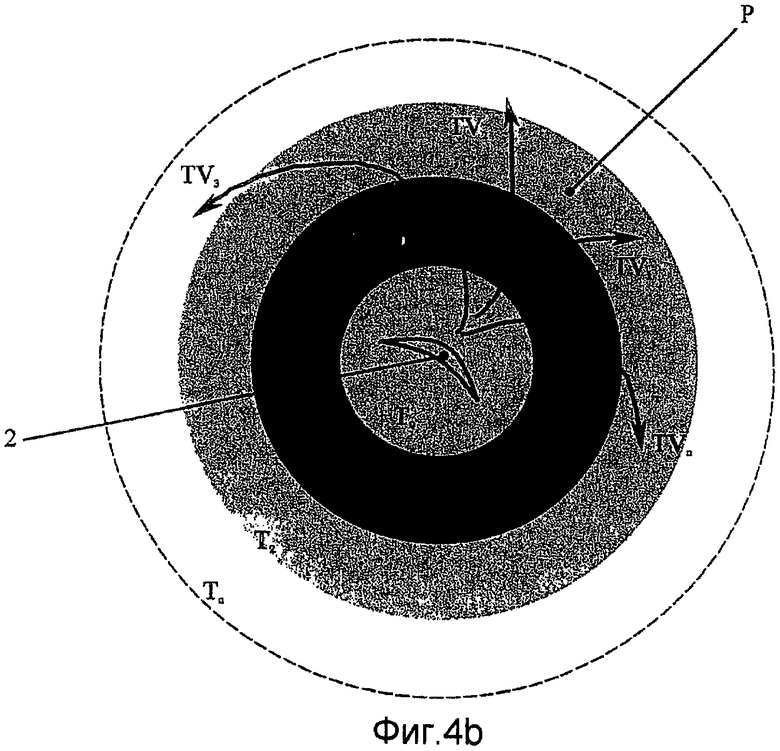
фиг.4b показывает вид сверху схемы по фиг.4a;
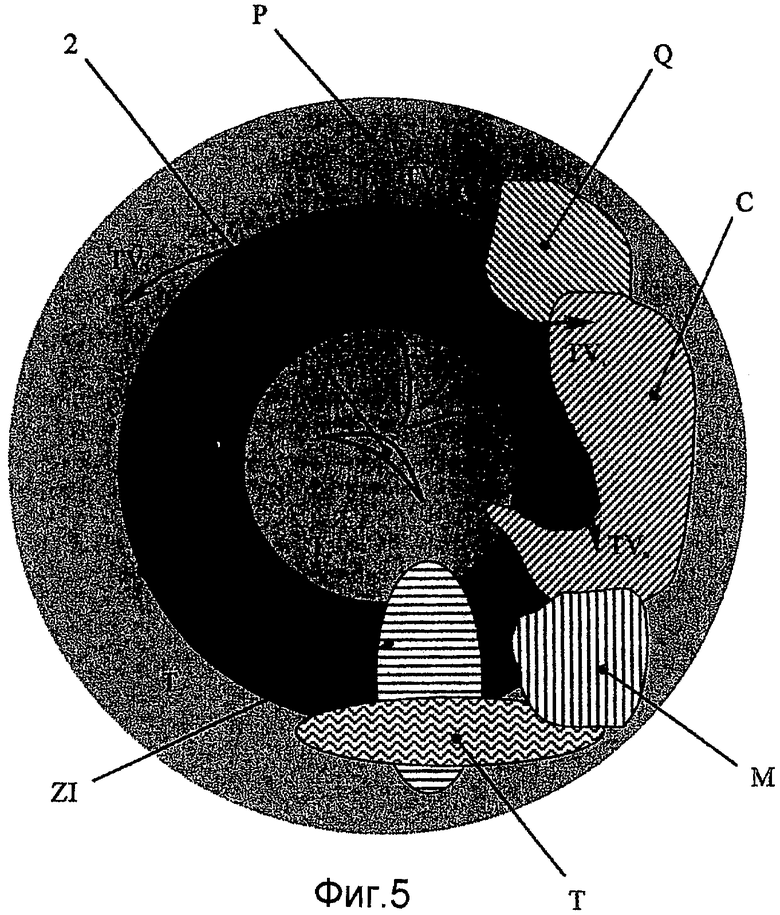
фиг.5 показывает схему по фиг.4, снабженную определенными параметрами процесса согласно настоящему изобретению; и
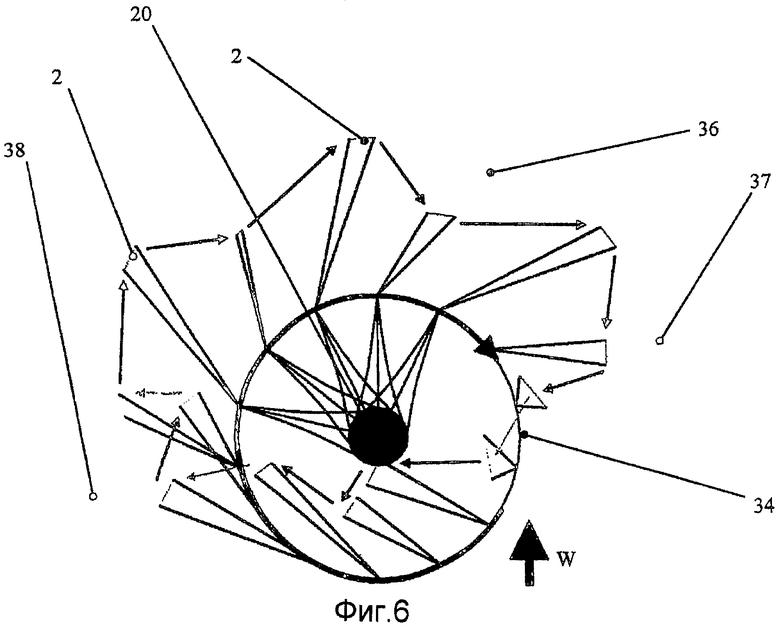
фиг.6 показывает вид сверху известной системы "карусельного" типа на некоторых этапах полета аэродинамической поверхности крыла, приводимой в движение посредством системы и/или процесса согласно настоящему изобретению.
В нижеследующем описании система и процесс согласно настоящему изобретению описывается как предпочтительно применяемая, просто в качестве примера, к автоматическому управлению полетом аэродинамических поверхностей силового крыла, используемых согласно тому, что описано в Патентной заявке (Италия) номер TO2003A000945 и в Патентной заявке (Европа) номер EP 04028646.0. Следовательно, вследствие очевидных вопросов краткости, для подробного описания компонентов, которые упоминаются выше и являются общими с известной системой "карусельного" типа, ссылка должна быть сделана на вышеуказанные заявки. Тем не менее, полностью очевидно, что система и процесс согласно настоящему изобретению также могут быть использованы также для других применений, отличных от системы "карусельного типа", посредством выполнения модификаций, которые в любом случае находятся в пределах понимания специалистов в данной области техники.
В таком контексте предполагается, что полет, по меньшей мере, одной аэродинамической поверхности силового крыла управляется посредством приводного блока, оснащенного попеременно приводимыми в движение мотором лебедками, с которыми соединена сама аэродинамическая поверхность посредством двух соответствующих приводных тросов, как описано в TO2003A000945 и EP 04028646.0.
Со ссылкой на фиг.1a можно отметить, что система 1 автоматического управления полетом, по меньшей мере, одной аэродинамической поверхности 2 силового крыла согласно настоящему изобретению содержит:
- первое средство 3 обнаружения на борту аэродинамической поверхности 2 силового крыла, выполненное с возможностью обнаруживать первые порции информации 3a, относящиеся, по меньшей мере, к одному положению и одной ориентации в пространстве самой аэродинамической поверхности и трехмерным ускорениям, которым она подвергается;
- второе средство 5 обнаружения на земле, выполненное с возможностью обнаруживать вторые порции информации 5a, относящиеся, по меньшей мере, к одной величине натяжения приводных тросов аэродинамической поверхности 2 крыла и к положению противовеса приводного блока 9;
- средство 7 обработки и управления первыми 3a и вторыми 5a порциями информации, выполненные с возможностью преобразовывать содержимое этих порций информации в механический привод, оперирующий лебедками приводного блока 9, чтобы приводить в движение аэродинамическую поверхности 2 крыла по траектории полета, которая максимизирует эффект "подъема", создаваемый на аэродинамическую поверхность 2 крыла посредством ветрового потока, в который он погружен, и максимизирует величину кинетической энергии, вычитаемой из ветрового потока; фактически, можно продемонстрировать, что если аэродинамическая поверхность силового крыла свободна от сканирования фронта ветра в ветровом потоке в режиме "подъема", не только тяга, которую он может прилагать на приводные тросы (и как следствие, возможно, на рычаги "карусельной" системы), намного превышает тягу, прилагаемую посредством удержания аэродинамической поверхности крыла неподвижным в точке максимального ветрового сопротивления за счет использования эффекта "увлечения", но и область, в которой аэродинамические поверхности крыла имеют тормозящий эффект на вращение возможной "карусельной" системы, полностью исключается; в частности, средство 7 обработки и управления содержит геометрический мотор 7a, выполненный с возможностью обрабатывать эти первые порции информации 3a, чтобы возвращать информацию 7c о положении, ускорении и ориентации аэродинамической поверхности 2 крыла в блок 7b числового управления, по сути, традиционного типа, выполненный с возможностью оперировать 9a лебедками приводного блока 9 для управления силой тяги на приводных тросах; и
- систему передачи первых порций информации 3a в средство 7 обработки и управления и, в частности, в геометрический мотор 7a.
Более того, система 1 согласно настоящему изобретению может содержать привод с нестабильным рассеянием реализованный согласно теории робастного управления.
Чтобы лучше понять режимы, в которых первые порции информации 3a непосредственно собираются посредством первого средства 3 обнаружения, то какие другие порции информации могут быть косвенно получены из первых порций информации 3a, и затем то, какие типы первого средства 3 обнаружения могут быть использованы в системе 1 согласно настоящему изобретению, должно быть полезным вкратце проанализировать геометрическую порцию информации, которая характеризует положение аэродинамической поверхности 2 крыла в пространстве. Следовательно, со ссылкой на фиг.2a можно отметить, что каждая аэродинамическая поверхность 2 крыла, которая выходит из-под рычага 20a системы 20 "карусельного" типа по заявкам TO2003A000945 и EP 04028646.0, описывает посредством двух приводных тросов 21, прижимающих его к земле, и воображаемой линии L, которая соединяет его концы, треугольник OAB, лежащий на плоскости в пространстве. Исследования в области аэродинамики вводят понятия крена, тангажа и отклонения от курса в общем положении в пространстве воздушного судна. В случае аэродинамической поверхности 2 крыла имеется ограничение, представленное посредством выпускной насадки приводных тросов 21, от рычага 20a, которое заставляет отказаться от классической терминологии (отклонение от курса, крен, тангаж). Рассмотрим далее идеальную базовую систему координат XYZref, общую с рычагом 20a системы 20, так что ускорение силы тяжести имеет компонент вдоль только одной оси Z. Давайте дополнительно рассматривать воображаемую линию, которая соединяет конец рычага 20a со средней точкой аэродинамической поверхности 2 крыла. Этот сегмент, указанный выше, описывает угол α с горизонтальной плоскостью XYref, и угол γ, который может находиться, начиная с оси Xref, посредством проецирования сегмента на горизонтальную плоскость XYref. Углы α и γ определяют положение аэродинамической поверхности 2 крыла в пространстве. Тем не менее, геометрическая порция информации является полной, только когда понятие ориентации также введено. Чтобы определить его, давайте снова рассматривать вышеописанный треугольник. Треугольник OAB лежит на плоскости, положение которой относительно наземной системы координат изменяется во времени в зависимости от полета аэродинамической поверхности 2 крыла. Термин ориентация аэродинамической поверхности 2 крыла, следовательно, определяет угол β, описываемый посредством плоскости, на которой лежат треугольник и горизонтальная плоскость Xyref, не считая углов α и γ. Хотя для того, чтобы логически определить положение и ориентацию аэродинамической поверхности 2 крыла в пространстве, может быть приспособлена искусственная наземная оптическая система видения, что может постоянно ухудшаться за счет возможного прохождения туч или отсутствия прозрачной атмосферы, причем эти проблемы ощущаются еще в большей степени, если система 1 используется совместно с системой 20 "карусельного" типа, отличающейся большими рабочими высотами полета аэродинамической поверхности 2 крыла.
Следовательно, предпочтительно для того, чтобы логически определить положение и ориентацию аэродинамической поверхности 2 крыла в пространстве и ускорения, которым она подвергается, первое средство 3 обнаружения содержит трехмерные акселерометры MEMS-типа в комбинации, по меньшей мере, с одним электронным компасом. Последнее может быть реализовано с помощью магнитометра феррозондового типа или другого типа, позволяющего предоставлять надежное решение, гораздо более точное, чем могло бы быть получено посредством искусственного просмотра даже в условиях идеальной видимости. В частности, аэродинамическая поверхность 2 крыла оснащена, по меньшей мере, одним магнитометром и, по меньшей мере, двумя трехмерными акселерометрами, размещенными на концах аэродинамической поверхности крыла, предпочтительно рядом с тем местом, где приводные тросы соединяются со стенками аэродинамической поверхности крыла. Акселерометры на борту аэродинамической поверхности крыла, следовательно, решают функции:
- предоставления системы 1 с возможностью распознавания положения и ориентации аэродинамической поверхности крыла в пространстве;
- обеспечения многомерными и мгновенными данными ускорения, полезными для корректной обратной связи контура управления процесса согласно настоящему изобретению, описанному ниже, реализованному посредством системы 1;
- корректировки возможного ложного восприятия вектора силы тяжести, вызываемого посредством сильных аэродинамических ускорений.
Магнитометры выполняют обеспечение только одной из порций информации, которая не обязательно находится вблизи системы акселерометров, а именно вращения аэродинамической поверхности 2 крыла вокруг оси центра тяжести.
Акселерометры типа, используемого в системе 1, чувствительны к широкому спектру ускорений, которые имеют диапазон от статического ускорения, такого как ускорение силы тяжести, до явления с частотными характеристиками в несколько кГц.
Трехмерный акселерометр, очевидно, определяет собственную декартову систему координат XYZA, как показано на фиг.2b. Посредством отображения момента, в который эта система координат совпадает с идеальной декартовой системой координат XYZref, чувствительность к ускорению силы тяжести (статическому) позволяет де-факто отличать изменение ускорения вследствие только наклона акселерометра (который подразумевает изменение направления ZA относительно Zref) от изменения вследствие фактического смещения начала системы координат XYZA, определяемого как аэродинамическое ускорение, которое представляет полет аэродинамической поверхности крыла.
В общем, трехмерный акселерометр будет иметь случайное положение в пространстве. Вектор g, который описывает ускорение силы тяжести с постоянным модулем, направлением и знаком, следовательно, может быть разложен на три своих компонента вдоль версоров параллельно трем осям XA, YA, ZA. Очевидно, что положение вектора g силы тяжести в системе координат XYZA также может быть выражено в сферических координатах в зависимости от углов φ и θ и модуля g (9,8 м/с2) посредством следующего изменения координат:
XgA = g * cos φ * sin θ
YgA = g * sin φ * cos θ
ZgA = g * cos θ
из которого получается следующее:
φ = atan2 (XgA, YgA)
θ = asin (XgA)
где atan2 - это функция арктангенса (x) с разрешением неопределенности(+/-)π/2.
Каждый акселерометр подвержен двум составляющим ускорения. Ускорение силы тяжести, описанное выше, векторно суммируется с аэродинамическим ускорением вследствие фактического движения аэродинамической поверхности крыла относительно фиксированной системы координат XYZref. Первое средство 3 обнаружения, следовательно, может быть выполнено с возможностью осуществления, со своей собственной интеллектуальностью на борту аэродинамической поверхности крыла, соответствующих алгоритмов, назначение которых состоит в различении ускорения силы тяжести от аэродинамического ускорения, передачи, с одной стороны, сферических координат, которые указывают разложение вектора силы тяжести относительно системы координат акселерометра (и, следовательно, наклон акселерометра относительно фиксированной системы координат), а с другой стороны, оценки аэродинамического ускорения в реальном времени. Измерение такого ускорения позволяет, во-первых, осуществлять методики управления в реальном времени, которые являются предпочтительными для быстрого управления полетом аэродинамических поверхностей крыла, как будет показано далее при описании процесса управления согласно настоящему изобретению. Это измерение дополнительно предоставляет возможность мгновенной корректировки требуемых углов φ и θ для оценки ориентации акселерометра, тогда как интеграция данных ускорения предоставляет возможность дополнительной оценки траектории полета аэродинамической поверхности крыла, де-факто завершая всю информацию, связанную с этим знанием.
Необходимость обеспечения аэродинамической поверхности крыла, по меньшей мере, двумя акселерометрами проистекает из того факта, что это необходимо для того, чтобы отличать эти перемещения аэродинамической поверхности крыла, которые могут рассматриваться как вращения вокруг одного из его концов. В этом случае только один акселерометр, собранный, например, в центре аэродинамической поверхности крыла, должен воспринимать тангенциальную скорость, которая может быть аппроксимирована с помощью υt=ω•r, где ω - это скорость вращения соответствующего кругового движения, тогда как r представляет собой расстояние акселерометра от центра вращения (в этом случае половину ширины аэродинамической поверхности крыла). Такая скорость не описывает корректно движение аэродинамической поверхности крыла, свободный конец которого описывает круговую траекторию с двойной тангенциальной скоростью υt= ω•r и центростремительным ускорением, равным ac=υt 2/r. Два акселерометра, размещающихся на аэродинамической поверхности крыла, следовательно, реализуют инерциальную платформу с шестью осями с высокой производительностью и высокой частотой отсечки, которая позволяет распознавать перемещения на шести осях и описывать положение и ориентацию самой аэродинамической поверхности крыла.
Повороты вокруг оси, которые не подразумевают изменений в направлении оси, которая параллельна Zref, тем не менее, могут восприниматься посредством этой конфигурации акселерометров только во взаимодействии. Следовательно, необходимо обеспечить аэродинамическую поверхность крыла, по меньшей мере, одним магнитометром для компенсации дрейфа вследствие двойной интеграции. Два акселерометра совместно с точкой выхода тросов 21 из рычага 20a описывают полностью известный треугольник, длина каждой стороны которого известна. Единственными неизвестными данными является угол, включенный между рычагом и парой тросов 21 (рассмотрим биссектрису острого угла, включенного между двумя тросами 21), спроецированный на горизонтальную плоскость XYref. Этот угол более удобно может быть оценен с земли посредством прямого его измерения на точке выхода тросов из рычага.
Как упоминалось, второе средство 5 обнаружения выполнено с возможностью обнаруживать вторые порции информации 5a, относящиеся, по меньшей мере, к величине натяжения приводных тросов аэродинамической поверхности 2 крыла и положению, фактическому или имитированному посредством лебедок приводного блока 9, противовеса; в частности, функция противовеса потенциально или электрически поглощает и сохраняет избыточную энергию, которая может быть образована вследствие слишком сильного ветра, и возвращает ее на этапах, при которых аэродинамическая поверхность крыла находится в состоянии потери скорости относительно ветра. Второе средство 5 обнаружения, следовательно, может содержать "тензодатчики" для измерения отклонения приводных тросов и кодеры на лебедках приводного блока; эти кодеры, возможно, связанные с возвратно-поступательным мотором, также могут быть использованы для обнаружения длины приводного троса, отмотанной от лебедок, и затем расстояния от аэродинамической поверхности крыла до приводного блока и дифференциальной длины между двумя приводными тросами одной аэродинамической поверхности крыла. Более того, второе средство 5 обнаружения также может содержать бесконтактные датчики, выполненные с возможностью обнаруживать угол между приводными тросами на выходе насадки рычага "карусельной" системы.
Второе средство 5 обнаружения также может содержать оптическую или микроволновую наземную искусственную систему видения для положения аэродинамической поверхности крыла. Наземный оптический просмотр, по сравнению с микроволновым, имеет непренебрежимый недостаток зависимости от прохождения туч, которые скрывают аэродинамическую поверхность крыла из вида. Эффективная искусственная система видения, тем не менее, предоставляет важный вклад в отношении безопасности, снабжая необходимой информацией для того, чтобы избежать столкновений с вертолетами и небольшими воздушными судами в целом.
Из первой 3a и второй 5a порций информации, соответственно измеренных посредством первого 3 и второго 5 средства обнаружения, положение аэродинамической поверхности крыла в пространстве в любом случае может быть получено, по меньшей мере, тремя различными способами:
a) обработка данных, поступающих от акселерометров и магнитометров через геометрический мотор; в частности, длина вектора положения аэродинамической поверхности крыла может быть получена через двойную интеграцию сигнала ускорения;
b) комбинирование данных, которые могут быть получены из кодеров лебедки при измерении углов между тросами и рычагом, которые могут быть получены на конце рычага; следует отметить, что из конца рычага могут быть оценены только углы, которые, в целом, формирует с помощью самого рычага пара приводных тросов;
c) использование искусственной системы видения: в этом случае, тем менее, к задержке на извлечение информации должна быть добавлена задержка, обусловленная сбором и составлением изображений.
Аналогично, ориентация аэродинамической поверхности крыла в пространстве может быть получена посредством обработки данных акселерометра и посредством искусственной системы видения.
Ускорение, вместо этого, обязательно должно получаться на борту аэродинамической поверхности крыла вследствие того факта, что задержка, вводимая посредством вычисления второй производной от положения, несовместима с методиками управления в реальном времени, которые являются предпочтительными для управления полетом аэродинамических поверхностей крыла. Это подразумевает, что интеллектуальность на борту аэродинамической поверхности крыла становится неотъемлемой частью системы 1 управления.
В альтернативном варианте осуществления также можно предусмотреть использование реологических полимеров в структуре аэродинамической поверхности крыла с целью реализации движущихся систем непосредственно на борту; в таком случае можно обеспечить то, что первое средство обнаружения содержит другие датчики, которые могут обеспечивать сигналы, извлекаемые посредством обратной связи из композитных материалов, чтобы способствовать или обнаруживать положение аэродинамической поверхности крыла в пространстве.
Исходя из того, что описано выше, измерение положения и ориентации аэродинамической поверхности крыла, как результат, вероятно, будет излишним; в частности, оценка ускорения, исходя из информации непосредственного положения и ориентации, хотя не является эффективной в отношении избыточности в реальном времени, может способствовать формированию диагностической избыточности системы для оценки характеристик полета аэродинамической поверхности крыла.
В этом контексте особая значимость может быть отдана изобретаемым методологиям проектирования виртуальных датчиков, размещаемых совместно с первым и/или вторым средством обнаружения системы 1. Фактически, многие из количественных величин, измеряемых посредством датчиков первого и второго средства обнаружения, могут, в случае сбоя конкретного датчика, также быть оценены из измерений других датчиков посредством экспертов/фильтров Калмана, конструируемых согласно адекватной модели динамического поведения аэродинамических поверхностей крыла. Преимущества возможности осуществления требуемых уровней избыточности посредством использования виртуальных датчиков вместо некоторых реальных датчиков очевидно, в общем, в зависимости от стоимости физических датчиков и проблем в установке и обмене данными с системой управления. Эти преимущества особенно значимы для датчиков на борту аэродинамических поверхностей крыла, в которых преимущества добавляются в отношении веса и потребления энергии. В этом смысле могут быть интегрированы опыты, извлеченные из применения виртуальных датчиков в авиационной области, как описано в "Rilevazione, isolamento e recupero of the guasti of the sensori di assetto di aeromobili", Graduation Thesis, Responsibles: M. Milanese (Dip. Automatica e Informatica), S. Chiesa (Dip. Ingegneria Aerospaziale), M. Birindelli (Alenia), Politecnico di Torino, 2003 by E. Corigliano, и в автомобильной области, как описано в "Experimental results in vehicle sideslip angle estimation" SAE 2006, Detroit di M. Milanese, D. Regruto, e A. Fortina.
Блок 7b числового управления, который приводит в движение аэродинамические поверхности крыла, требует надежной и получаемой в реальном времени информации ускорения и положения. В частности, трехмерные ускорения, которые описывают поведение, в трехмерном пространстве, аэродинамической поверхности крыла, обязательно должны получаться на борту самой аэродинамической поверхности крыла, т.е. на высоте.
Отсюда следует необходимость того, чтобы система передачи первых порций информации 3a между аэродинамической поверхностью крыла и средством 7 обработки и управления удовлетворяла строгим спецификациям в отношении производительности и поглощения энергии. Чтобы соответствовать этим требованиям и, предпочтительно исключая наиболее очевидное гальваническое соединение между аэродинамической поверхности крыла и средством 7 обработки и управления для того, чтобы не предоставлять благоприятный путь для возможных атмосферных разрядов, система передачи может быть интегрирована в приводные тросы аэродинамической поверхности крыла посредством, по меньшей мере, одного оптоволокна передачи данных.
Вставка оптоволокон в тросы, тем не менее, должна учитывать то, что приводные тросы, как правило, имеют высокомодульное волокно, и что рабочее окружение является сложным как для кевлара, так и для полиэтилена UHMW. Как известно, кевлар может иметь утечки и имеет тенденцию к поглощению воды, что может привести к повышению электропроводности в случае кислотных дождей или локальных загрязнений, приводя к необходимости использования защитных кожухов или оплеток, например, изготовленных из THFT, которые также выполняют функцию предотвращения истиранию. В этом случае естественное размещение оптоволокна должно быть между кожухом и пучком волокон, обращая внимание на предоставление определенной свободы по длине, чтобы не подвергать оптический компонент тому же упругому искривлению троса.
В случае UHMW-полиэтилена соображения, данные для кевлара, остаются в силе, но должна быть добавлена проблема его применения: так называемая "ползучесть", т.е. необратимое удлинение со временем под действием сил, что приводит к частой замене тросов, снабженных оптоволокнами, тем самым сокращая фактическое рабочее время. Тем не менее, имеются материалы, связанные с полиэтиленом, которые уменьшают проблему, которая может быть рассмотрена в комбинации с возможным сплетением оптоволокна внутри самого UHMW-пучка. Тем не менее, необходимо подчеркнуть, что сечение повышается с квадратом диаметра, и поэтому рабочая нагрузка на тросы должна быть легко измерена в зависимости от максимального требуемого усилия, без подвергания ползучести и без увеличения силы аэродинамического сопротивления, т.е. сопротивления, которое тросы оказывают при проникании воздуха. Более того, геометрическое моделирование аэродинамической поверхности крыла по сечению троса может быть полезным решением для принятия формы с меньшим сопротивлением и большим подъемом.
Другие оптоволокна в тросах могут быть использованы для питания энергией первого средства обнаружения на борту аэродинамической поверхности крыла. При введении, в многорежимном волокне с малыми потерями, достаточной величины света на стороне земли свет может быть реконвертирован через микрофотоэлектрический модуль, например, изготовленный из GaAS, на стороне аэродинамической поверхности крыла.
Альтернативно, система передачи может предоставлять передачу первых порций информации по радиочастоте, причем это решение, разумеется, считается наиболее естественным способом обмена данными, который требует исключения электрических соединений, но может быть затратным с энергетической точки зрения.
Даже если оптоволокна разрешают передачу информации, в любом случае предпочтительно держать дополнительный ресурс, представленный посредством радиочастотной передачи, для целей резервирования. Если радиосвязь, таким образом, представляет запасное решение относительно обмена данными по оптоволокнам, схема безопасности может подать сигнал на ее активацию, будучи внимательной к возможным прерываниям подтверждения приема оптических потоков.
Очевидно, что радиочастотная система передачи может использовать огромное множество протоколов связи для того, чтобы отправлять первые порции информации в наземное средство обработки и управления. При использовании, например, протокола управления однонаправленным непрерывным потоком, нижним уровнем связи, физическим уровнем, должен быть радиочастотный переносчик, который может быть простым FSK-модулятором цифровой информации, предоставляемой посредством датчиков и всегда активным, тем не менее, подразумевая непрерывное поглощение энергии. Тем не менее, можно предоставить некоторые решения для уменьшения необходимого времени и мощности для передачи информации, к примеру, следующие:
- направленные антенны с большим усилением: антенна, которая не добавляет сопротивления в воздушный поток, может быть получена с помощью выводов, соответствующих существующей геометрии: подходящими местами может быть отрезок троса рядом с аэродинамической поверхностью крыла или стенка аэродинамической поверхности крыла. Эти два размещения должны иметь преимущества постоянной направленности к приводному блоку, который может вмещать соответствующую приемную антенну, обменивающуюся данными со средством обработки и управления;
- подавление несущей: это решение, известное как передача в одной боковой полосе частот, которая обеспечивает большую экономию энергии, тем не менее, уменьшая скорость передачи битов, на которой может вестись передача;
- асинхронная активация: это решение требует специального программного обеспечения на борту передающего устройства, которое оценивает содержание потока данных, передавая информацию только в наиболее значимые моменты времени за счет принятия концепции ключевых кадров видеосжатия. Данное преимущество является важным, поскольку могут быть получены факторы уменьшения потребности в энергии, которые могут быть вычислены аналогично факторам сжатия данных.
Альтернативно, протокол пакетной передачи дейтаграмм может быть использован, например, тот, который используется в Интернете для передачи потоков данных без характеристической последовательности и проверок достоверности, подходящий для видео- и радиовещания. Поскольку протокол является двунаправленным, нагрузка от проверки ритма обмена данными и связанного электрического поглощения может быть передана в блок управления приемной станции, которая может опрашивать датчики только в случае необходимости или перестраивать динамическую модель системы управления согласно реальному состоянию.
Альтернативно, может быть использован транспортный протокол асинхронного согласования, который более сложно выполнить, но он может объединить все преимущества вышеописанных решений. Он, в сущности, является очень легким и восприимчивым двунаправленным протоколом, который позволяет начинать обмен данными как со стороны первого средства обнаружения, так и со стороны средства обработки и управления. Отсутствие стека приводит к факту отсутствия задержек, которые могут снижать скорость передачи битов.
В дополнительной альтернативе возможно предоставление использования ультразвуковой системы передачи.
В любом случае, два акселерометра вместе с магнитометром на борту аэродинамической поверхности крыла формируют семь информационных потоков по тысячи выборок в секунду. Этот поток необработанных данных от аэродинамической поверхности крыла к земле, помимо того, что является непомерным для передачи, практически бесполезен для геометрического мотора: геометрический мотор на практике должен делать оборот с частотой, согласующейся с размером системы и постоянными времени, непрерывно обеспечивая обновленные данные положения в блок числового управления, и претендует на более обоснованные данные в качестве ввода. Для этой цели может быть предоставлено использование средства 11 предварительной обработки, выполненное с возможностью осуществления предварительной обработки всех или части первых порций информации 3a на борту аэродинамической поверхности крыла для предоставления предварительно обработанных первых порций информации 3a', выполненных с возможностью передачи и упрощенной обработки посредством геометрического мотора 7a. Для этой цели акселерометры могут быть оснащены интегрированным средством 11 предварительной обработки DSP (обработки цифровых сигналов).
Кроме того, как ранее указывалось, акселерометры MEMS-типа, используемые для сбора полезной информации для получения сведений о траектории полета аэродинамической поверхности крыла, чувствительны и к статическим ускорениям (сила тяжести), и к динамическим ускорениям. Вследствие необходимости использовать (статическое) ускорение силы тяжести для измерения полезных углов для получения положения и ориентации аэродинамической поверхности крыла возникает проблема изоляции статического ускорения от интенсивных аэродинамических ускорений, которым подвергается аэродинамическая поверхность крыла. Эта работа может быть выполнена посредством соответствующего алгоритма, который обязательно должен быть циклическим на скоростях, которые несовместимы со скоростью передачи, доступной посредством системы передачи, и, следовательно, должен быть выполнен средством 11 предварительной обработки на борту аэродинамической поверхности крыла.
Система 1 согласно настоящему изобретению дополнительно содержит, по меньшей мере, одну систему питания первого средства обнаружения и компонентов системы передачи на борту аэродинамической поверхности крыла; очевидно, что это первое средство и компоненты могут иметь автономное питание посредством собственных аккумуляторов.
Тем не менее, необходимо учитывать тот факт, что система 1 согласно настоящему изобретению, прежде всего, если используется в связи с "карусельной" системой, может требовать очень высокой энергетической автономности для того, чтобы исключить необходимость направлять аэродинамическую поверхность крыла к земле с излишней частотой, чтобы заменять или перезаряжать батареи, с вытекающими накладными расходами, связанными с необходимостью останавливать работу "карусельной" системы. Более того, полезно учитывать то, что система 1 должна иметь возможность работать во взаимодействии с естественными силами и событиями, такими как дождь, снег, лед, серьезные изменения ветра, атмосферные разряды, день, ночь, солнце. Чтобы сделать доступной ограниченную потребность в энергии на борту аэродинамической поверхности крыла, предусмотрены альтернативные решения по автономному питанию, которые используют солнечные и видимые ветровые элементы. Система питания, фактически, может содержать фотоэлектрические тонкопленочные модули на пластиковой основе, которые могут преимущественно применяться в аэродинамической поверхности крыла без модификации ее аэродинамических характеристик и веса. Эти модули, очевидно, должны создавать достаточное количество энергии для питания бортовой электроники, увеличивая способность подзарядки возможных аккумуляторов в течение ночи.
Альтернативно, можно использовать явный ветровой поток, который всегда доступен вокруг аэродинамической поверхности крыла; система питания, следовательно, может содержать, по меньшей мере, одну ветровую микротурбину, подключенную к небольшому генератору с постоянными магнитами и питаемую ветром.
Настоящее изобретение дополнительно относится к процессу автоматического управления полетом аэродинамических поверхностей силового крыла, предпочтительно посредством системы 1, аналогичной описанной ранее. В частности, процесс согласно настоящему изобретению работает в прогнозирующем режиме согласно "предпочтительной стратегии управления" на основе наблюдения и прогнозирования будущих условий полета аэродинамических поверхностей крыла с учетом критических ситуаций и ошибок, обусловленных прогнозированием, позволяющей не допускать локальных максимумов, колебаний и нестабильностей управления аэродинамических поверхностей крыла. Как описано выше, система 1 согласно настоящему изобретению выполнена так, что средство 7 обработки и управления получает в качестве входной информации: положение, ускорения, силы и другие геометрически заданные количественные величины, обрабатывает их и в качестве выхода работает с лебедками, которые управляют траекторией полета аэродинамической поверхности крыла.
Чтобы лучше описать логику выполнения процесса согласно настоящему изобретению, полезно снова обратиться к динамическому поведению аэродинамической поверхности крыла. Со ссылкой, в частности, на фиг.3 можно схематично отметить условия ветрового фронта или ветрового потока W, который аэродинамическая поверхность 2 крыла способна перехватывать, в следующие моменты, относительно эталонного, общего с точкой ограничения приводных тросов 21, к земле. Фиг.3 описывает, по сути, четверть сферы, которая является навигационной областью аэродинамической поверхности 2 крыла, в центре которой задана так называемая "силовая зона" 31, в которой аэродинамическая поверхность 2 крыла выдает максимальную тягу на приводные тросы 21. При уходе из "силовой зоны" 31 через зону 32 окна, в котором может перемещаться аэродинамическая поверхность 2 крыла, в которой тяга на приводные тросы 21 постепенно снижается, достигается край 22 окна, в котором может перемещаться аэродинамическая поверхность 2 крыла, при этом тяга на приводные тросы 21 существенно снижается.
Со ссылкой на фиг.4a и 4b, представим теперь, чтобы рассмотреть в данном случае аэродинамическую поверхность 2 крыла, помещенную в центр идеальной "целевой" плоскости P, однозначно заданной как нормаль к биссектрисе угла, сформированного посредством двух приводных тросов 21. Процесс согласно настоящему изобретению посредством работы с системой 1 может решать, должна ли аэродинамическая поверхность 2 крыла выполнять любую из возможных траекторий полета TV1, TV2, TV3,..., TVn, исходя из текущего положения в центре плоскости P. На этой плоскости P можно разделить траектории полета, которым может следовать аэродинамическая поверхность 2 крыла, в зависимости от необходимого времени T0, T1, T2,..., Tn, чтобы достичь каждой точки. В частности, можно рассматривать следующие временные интервалы, которые соответствуют следующим угловым положениям рычага 20a "карусельной" системы 20. Траектория полета аэродинамической поверхности 2 крыла посредством этого возникает синхронно с движением рычага 20a.
Для простоты рассмотрим, в частности, фиг.4b с координатами, связанными с аэродинамической поверхностью 2 крыла. Декартовая система координат является общей с аэродинамической поверхностью 2 крыла, и вместе с ней она перемещается в пространстве. Следовательно, аэродинамическая поверхность 2 крыла всегда находится в центре плоскости P. Течет только время. Схема не показывает точку, в которую он должен прийти, поскольку это будущая оценка. Когда первый временной интервал T0 истекает, система координат, общая с аэродинамической поверхностью крыла, снова чертит "цель", которая полностью аналогична предыдущей с единственной разницей в том, что время T1 стало T0 и т.д. T1 представляет, таким образом, набор точек, которые могут быть достигнуты посредством аэродинамической поверхности 2 крыла в своей траектории полета за 1 шаг, T2 - набор точек, которые могут быть достигнуты за 2 шага, и т.п. Аэродинамическая поверхность 2 крыла в любом случае всегда находится в центре "целевой" плоскости P.
Для простоты фиг.2a и 2b показывают в качестве примера "целевую" плоскость P до времени T2, но очевидно, что число n шагов, которые могут наблюдаться, может быть другим.
Чтобы оценить собственные стратегии управления и выбрать траекторию полета, которую должна выполнять аэродинамическая поверхность 2 крыла, процесс согласно настоящему изобретению использует параметры полета и управления.
Поэтому, со ссылкой на фиг.5, можно отметить "целевую" плоскость P, на которой графически включены для процесса некоторые параметры полета и управления согласно настоящему изобретению.
Фиг.5 показывает то, как параметры в упрощенной форме изменяются в пространстве, снижая сложность поворотных перемещений "карусельной" системы в модели, общей с системой координат аэродинамической поверхности 2 крыла. Морфология и характеристики этих параметров являются важнейшей частью информации, которая обеспечивает управление для принятия решения о стратегии полета аэродинамической поверхности 2 крыла. Фактически можно таким образом представлять оптимальное движение, направление и положение для достижения идеальной высоты Q, чтобы иметь наилучший ветер, или с наилучшим углом атаки относительно ветра, но в то же время можно представить другие параметры, такие, к примеру, как требуемая максимальная область тяги T, запрещенные области ZI (области, в которых имеются, к примеру, ситуации недопустимых структурных нагрузок, нестабильность, избыточные силы), и функциональные параметры системы 1, например области, в которых противовес C, который используется для поддержания параметров полета аэродинамической поверхности 2 крыла постоянными и для быстрого регулирования длины приводных тросов (динамической длины), поддерживается на половине их собственной динамики. График C, соответствующий противовесу, например, может допускать пригодные положения для подъема противовеса или для его опускания. Кроме того, лебедки приводного блока могут подчиняться параметрам, поскольку они показывают абсолютную длину тросов. График параметра Q высоты, наоборот, представляет оптимальную область для задач высоты. График параметра M маневра, наоборот, представляет оптимальную область для осуществления наиболее важного маневра в полете аэродинамической поверхности 2 крыла, заданного как азимутальный поворот через фортевинд, который состоит во внезапном маневре, в ходе которого аэродинамическая поверхность 2 крыла проходит быстрый переход между траверзами полета. С конкретной ссылкой на фиг.6, можно отметить, что в общем, если аэродинамическая поверхность 2 силового крыла свободна от сканирования фронта ветра, не только тяга, которой он может приводить в действие приводные тросы (и как следствие, рычаги "карусельной" системы 20), намного превышает тягу, прилагаемую для удержания аэродинамической поверхности крыла неподвижной в точке максимального ветрового сопротивления (аэродинамического сопротивления), но и область, в которой аэродинамические поверхности 2 крыла имеют эффект торможения при вращении "карусельной" системы 20, полностью исключается. В области 37 против ветра или булиня способности управления полетом аэродинамической поверхности 2 крыла позволяют выполнять азимутальный поворот через фортевинд, который состоит в быстром переходе между двумя траверзами 36 и 38, в ходе которого аэродинамическая поверхность 2 крыла проходит в воздухе расстояние, по меньшей мере, в три раза превышающее дугу окружности 34, затрачиваемую во времени, за которое "карусельная" система 20 проходит вдоль этой дуги. Управление полетом должно учитывать, что маневр, помимо того, что должен быстро выполняться, не имеет никакого отрицательного влияния при генерировании энергии. На фиг.6 положение каждой аэродинамической поверхности крыла случайное, т.е. изображение должно рассматриваться как верхний снимок работы "карусельной" системы. В этой конфигурации каждая аэродинамическая поверхность крыла свободна от поиска максимальной интенсивности ветра, избегая истощенных областей фронта ветра для прохождения непосредственно предшествующей аэродинамической поверхности крыла.
Размер каждого графика (вес, противовес и т.д.) пропорционален разрешенному допуску для соответствующего параметра. Каждый параметр, в свою очередь, имеет относительный вес PQ, PC, PM, PZI, PT, относительную высоту относительно всех высот, которая описывается ниже.
Из плоскости, показанной на фиг.5, после выполнения маневра и истечения временного интервала T0, переходим к новой плоскости P, пересчитанной для следующего решения. Если глобальные ситуации неизменны, графики, относящиеся к каждому параметру, стремятся к концентрированию. Выбор графического представления оптимальных областей для каждого рассматриваемого параметра является способом разрешения неопределенностей и понимания того, какое решение должно быть выбрано. Эта стратегия полезна в том, что не попадает в локальные максимумы, а именно положения, которые кажутся наилучшими, но не являются таковыми.
Процесс всегда имеет доступную информацию в прямой форме или в форме, извлеченной из первой и второй порций информации, обнаруженных с помощью средства обнаружения системы 1, связанную с высотой полета аэродинамической поверхности крыла, с динамикой противовеса, со значениями тяги, с вычислением безопасности в запрещенных областях, со временем, в которое должны выполняться маневры. Давайте рассмотрим, например, наиболее важный маневр в полете аэродинамической поверхности крыла, который определен как азимутальный поворот через фортевинд. Решение о том, следует ли выполнять его, может быть инициируемым событием: при таких условиях, по сути, процесс согласно настоящему изобретению может предоставлять экстренный этап, на котором демонстрируют аэродинамическую поверхность крыла, маневр которой должен быть осуществлен с максимальным приоритетом. Нельзя исключать того, что дальновидная стратегия автоматически продумывает маневр без необходимости его предложения. Если хорошая временная глубина оценки достигнута, поворот через фортевинд выполняется в идеальное время, вычисленное в зависимости от текущей информации и параметров, поскольку предпочтительно он является наиболее разумным действием для того, чтобы не потерять тягу, не утратить динамику на противовесе и соответствовать конкретной высоте без попадания в запрещенные области.
Этап процесса, который определяет на каждом этапе то, какое направление может принять траектория полета аэродинамической поверхности крыла, визуально может быть представлен как матрица, к примеру, показанная в нижеследующей табл. 1, содержащая для каждого параметра наилучшие координаты XY в моменты времени T0, T1, T2,..., Tn на нормальной плоскости относительно центра тяжести приводных тросов.
Матрица в табл.1, таким образом, содержит требуемые данные. Разность между текущей высотой и требуемой высотой позволяет выполнить одно обращение к логике блока числового управления или выполнить вычисление ошибок. Данная характеристика является свойственной для матрицы: по существу, имеются текущие координаты и требуемые координаты для T0, T1, T2,..., Tn. Все параметры, трактуемые в матрице, создают пары значений XY для момента времени T0, T1, T2,..., Tn. После этого процесс фотографирует ситуацию, в которой находится аэродинамическая поверхность крыла, и преобразует плоскость P на фиг.5 в числа и координаты. С учетом, например, задачи высоты значение матрицы QX0Y0 указывает точку рядом с параметром высоты, стремящуюся к центру графика высоты Q на фиг.5. Круговая форма делает все согласованным по времени, когда тренд очевиден: повышение в T1, T2. В случае тяги процесс может уже вычислять развитие идеальной точки во времени: форма требуемых данных поэтому не является круглой.
Очевидно, что относительный вес PQ, Pc, PM, PZI, PT каждого соответствующего параметра Q, C, M, ZI, T может задаваться, и это задание может быть динамическим (с обратной связью). Посредством анализа, например, средней погрешности требуемой высоты относительно текущей высоты и т.д. процесс может получать данные о наиболее трудных параметрах, которые должны быть удовлетворены. Процесс с обратной связью корректирует веса наиболее критичных параметров таким образом, чтобы сделать решения по этим параметрам более важными. Этому типу ошибки может быть присвоен показатель, к примеру, процентный показатель, стандартизированный для каждого параметра относительно максимального значения ошибки. Например, если во времени противовес всегда находится вне центра динамики и рискует дойти до своего ограничения хода, эта стандартизация предоставляет возможность обнаружения того, какой из параметров делает больше всего ошибок. Это может быть независимый процесс, который управляет весами каждого параметра.
После сбора наилучших координат для каждого параметра процесс предусматривает этап, на котором вычисляется векторная сумма всех координат во время T0. Результирующий вектор - это RX0Y0, который еще не является направлением траектории полета, по которой аэродинамическая поверхность крыла должна перемещаться, поскольку должен быть еще рассмотрен прогноз на будущее. Далее процесс вычисляет векторные суммы для всех будущих этапов RX1Yl, RX2Y2,..., RXnYn, и затем вводятся временные веса PT0, PT1, PT2,..., PTn, которые дают приоритет краткосрочным стратегиям, в то же время не допуская попадания аэродинамической поверхности крыла в потенциально критические области.
Также очевидно, что временные веса PT0, PTl, PT2,..., PTn могут быть задаваемыми.
Посредством вычисления матрицы в табл.1 процесс согласно настоящему изобретению определяет идеальную мгновенную координату (цель), к которой следует стремиться при маневре аэродинамической поверхности крыла по траектории полета. После нахождения идеальной координаты необходимо рассмотреть маневр и управление приводными тросами, чтобы заставить аэродинамическую поверхность крыла достичь свою цель. Процесс в таком случае содержит этап выбора наилучшего пути (кратчайшего пути, с пропуском запрещенных областей и т.д.), чтобы привести аэродинамическую поверхность крыла из текущего положения к цели. Поэтому на данном этапе процесс выбирает, в зависимости от цели, которая должна быть достигнута, наилучшую траекторию полета для ее достижения с минимизацией времени, поскольку нахождение аэродинамической поверхности крыла всегда корректно на целевой последовательности, определенной как лучшая, и является гарантией генерирования максимальной энергии с максимальной безопасностью и максимальным соответствием динамическим спецификациям. Сутью проблемы на данном этапе является то, как преобразовать координаты цели в тягу. Этап выбора лучшего пути, следовательно, использует инерционную навигационную систему (INS), поддерживаемую динамической моделью аэродинамической поверхности крыла (FVM), с учетом уравнений и инерций полета аэродинамической поверхности крыла наряду с процентной долей реакции, которую он может иметь в зависимости от разности тяги на тросах. Инерции и тяга описывают закон маневрирования аэродинамической поверхности крыла; приемлемо учитывать (прогнозные) оценки лучшего пути посредством оценки всех возможных путей и оценки маневра с помощью дерева решений. На этом этапе принимаются во внимание кажущиеся скорости и тяги, и можно точно оценить стратегию наилучшего пути. Синергия между инерциальной навигацией и информацией, предоставляемой посредством динамического моделирования, а именно модели движения получают из истории положений аэродинамической поверхности крыла, из управляющих входных данных и из сил, действующих на саму аэродинамическую поверхность крыла, широко продемонстрирована ранее с помощью использованных динамических уравнений транспортного средства (например, с помощью Koifman и Bar-Itzhack, 1999; Ma et al., 2003). Эти исследования демонстрируют то, что основное преимущество использования модели транспортного средства заключается в улучшении способности наблюдать источники ошибок в INS.
В инерциальной навигационной системе INS положение (ρn), скорость (vn) и углы Эйлера (ψ) аэродинамической поверхности крыла, упоминаемые как система координат n=[N, E, D] (север, восток, вниз), вычисляются следующим образом:
p n =v n
v n =C b m f b +g n
Ψ = E b n ω b
где gn - это ускорение силы тяжести, fb - это вектор ускорения в трех осях, ωb - это вращение. Cn b и En b - это соответственно матрицы преобразования и вращения, определенные следующим образом:
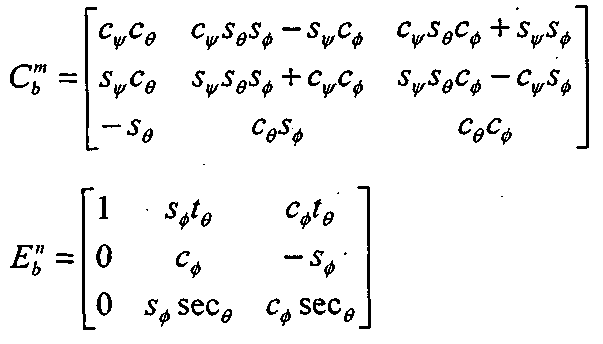
где s(.), c(.) и t(.) представляют sin(.), cos(.) и tan(.), тогда как Ψ =[φ, θ, ψ] - это углы Эйлера.
Динамическая модель аэродинамической поверхности крыла (FVM) с шестью степенями свободы вместо этого составляется из набора уравнений, который предусматривает переменные состояния аэродинамической поверхности крыла, состоящие из положения, скорости, углов Эйлера и вращений посредством управляющих переменных аэродинамической поверхности крыла, которые принимаются известными из системы 1. Движение аэродинамической поверхности крыла может быть описано посредством следующей системы уравнений движения, в которой силы, действующие на транспортное средство, являются функцией от положения, скорости, углов Эйлера и текущего вращения аэродинамической поверхности крыла:
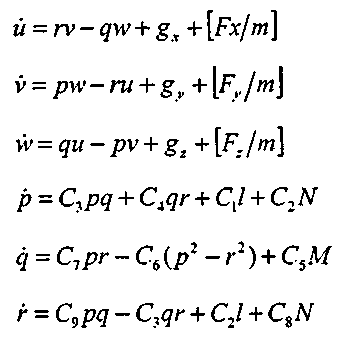
где vb=[u, v, w] - это компоненты скорости вдоль трех осей в системе координат аэродинамической поверхности крыла, ωb=[p, q, r] - это вращения аэродинамической поверхности крыла, Fx, Fy, Fz и I, M, N - это компоненты силы и моментов, действующих на аэродинамическую поверхность крыла вдоль его собственных осей, gx, gy, gz - это компоненты вектора ускорения силы тяжести, разложенного в системе координат аэродинамической поверхности крыла, масса которых обозначается как m. Коэффициенты C0-9 получаются, исходя из инерционной матрицы I.
Например, может быть два способа, посредством которых динамическая модель аэродинамической поверхности крыла FVM может быть применена в качестве поддержки к инерциальной навигационной системе: первый способ подразумевает сравнение и корректировку скорости и позиции аэродинамической поверхности крыла, к примеру, получаемых независимо от INS и от FVM. Второй способ использует прогноз ускорения и вращения, выполняемый посредством FVM, для реализации прямого точного определения инерциального измерительного блока (IMU). В обоих случаях INS обрабатывает положение, скорость и углы Эйлера (которые описывают вращение) аэродинамической поверхности крыла для интеграции измерений ускорения и вращения, предоставляемых посредством IMU на борту аэродинамической поверхности крыла. Тем не менее, в первом способе модель аэродинамической поверхности крыла вычисляет скорость и углы аэродинамической поверхности крыла посредством использования управляющих входных данных самого воздушного судна. Более того, реальное исполнение FVM и INS использует преимущество от применения самых последних разработок в математике на основе кватернионов. Задача обобщенного фильтра Калмана (EKF) заключается в оценке ошибок INS и FVM посредством наблюдения различий между данными скорости и углов соответственно, формируемыми посредством INS и FVM.
Во втором способе, наоборот, FVM используется для вычисления оценки ускорения и вращения непосредственно из управляющих входных данных. Ввод обобщенного фильтра Калмана, следовательно, составлен из различий между оценками ускорения и вращения, вычисляемыми посредством FVM, и оценками, считываемыми с используемых датчиков. EKF, следовательно, используется для оценки ошибок ускорения и вращения датчиков и FVM, которые затем используются для последующей корректировки датчиков и FVM.
Тем не менее, маневрирование аэродинамической поверхности крыла имеет проблему точного определения. Очевидно, что возможно выбирать величину маневра, но величина по-прежнему должна быть задана. По сути, есть риск колебаний с чрезмерным усилением, вследствие внутренних причин, упругости кинематической цепи (лебедки находятся на земле, маневры выполняются в воздухе) и задержки измерений (пренебрежимой). Следовательно, имеется риск выполнения неточно определенных, недостаточных или усложненных маневров, которые заставляют выполнять постоянные корректировки (противоположную компенсацию) с риском неуправляемых колебаний. Чтобы разрешить эту группу проблем, область техники управления уже разработала методики, такие как методики Хинфа и уже упоминаемые фильтры Калмана, которые рассматривают задержку приведения в действие как одно из возмущений, один из шумов которого управление должно регулировать посредством оптимизации маневра и его ограничения с помощью фильтров и методологий, которые калибруются в системе или самокалибруются. Описанный процесс согласно настоящему изобретению может быть оснащен способностями прогнозирования, временная глубина которых является функцией от мощности обработки информации системы согласно настоящему изобретению. Другая основная характеристика, которая обеспечивает прогнозирование вышеописанных проблем, состоит в том, что средство обработки и управления принимает связанную с ускорением информацию. Чрезмерный маневр, следовательно, воспринимается по большей части заранее относительно того, когда возникает движение, и это должно привести систему в докритическую ситуацию, когда колебания могут быть не инициированы способностью датчиков по предоставлению данных 180° до движения. Данные положения должны быть непосредственно доступны, причем новое действие должно выполняться после того, как произошло повреждение, при этом ускорение оповещает о повреждении.
Исходя из описанного выше, процесс согласно настоящему изобретению, следовательно, содержит этапы:
a) обнаружения первых порций информации 3a посредством первого средства 3 обнаружения, относящегося к текущему моменту траектории полета аэродинамической поверхности крыла; возможно, предварительной обработки всех или части первых порций информации 3a посредством средства 11 предварительной обработки, чтобы получить предварительно обработанные первые порции информации 3a';
b) обнаружения вторых порций информации 5a посредством второго средства 5a обнаружения, относящихся к текущему моменту траектории полета аэродинамической поверхности крыла;
c) отправки посредством системы передачи первых порций информации 3a, 3a' в средство 7 обработки и управления, в частности в геометрический мотор 7a;
d) отправки вторых порций информации 5a в средство 7 обработки и управления, в частности в геометрический мотор 7a;
e) из первых 3a, 3a' и вторых порций информации, непосредственного или косвенного получения значений, относящихся, по меньшей мере, к текущему положению XY и текущей высоте полета аэродинамической поверхности крыла, к динамике противовеса и к тяге в приводных тросах;
f) определения параметров полета и управления, таких как, например, высота Q, динамика противовеса C, маневр M, запрещенные области ZI, тяга T приводных тросов; возможно, определения допуска для каждого из этих параметров;
g) определения относительного веса PQ, PC, PM, PZI, PT для каждого из параметров полета и управления;
h) вычисления для каждого параметра наилучших координат XY в следующие моменты времени T0, T1, T2,..., Tn;
i) вычисления векторной суммы RX0Y0 всех координат в момент времени T0;
j) вычисления векторных сумм RX1Y1, RX2Y2,..., RXnYn для всех будущих моментов времени Tl, T2,...,Tn;
k) определения и применения временных весов PT0, PT1, PT2,..., PTn для векторных сумм;
l) выбора наилучшего из RX1Y1, RX2Y2,..., RXnYn в качестве идеальной мгновенной координаты (цели), к которой должен стремиться маневр аэродинамической поверхности крыла;
m) выбора наилучшего пути траектории полета TV1, TV2, TV3,..., TVn так, чтобы направить аэродинамическую поверхность крыла из текущего положения к цели;
n) направления аэродинамической поверхности крыла из координат текущего положения к цели посредством приведения в действие блока 7b числового управления системы 1; предпочтительно использования навигационной системы (INS), поддерживаемой посредством динамической модели аэродинамической поверхности крыла (FVM);
o) повторения этапов a)-n) для каждого временного интервала Δt, определяемого как частота контура управления; может быть обеспечено то, что процесс согласно настоящему изобретению также содержит этап регулировки с обратной связью продолжительности Δt, делая частоту контура регулируемой де-факто. Если Δt короткое, процесс выполняет точный и подробный, но, возможно, избыточный и вряд ли дальновидный краткосрочный прогнозный анализ, поскольку n возможных во времени этапов не достигают глобально оптимального временного промежутка от текущего момента: становится необходимым связать этапы прогнозирования будущего с продолжительностью этапа для того, чтобы оптимизировать временную глубину пути полета аэродинамической поверхности крыла, который должен быть выполнен. Следовательно, надлежит оценивать возможность выполнения прогноза, который покрывает слишком далекое будущее: разумно предположить, что предоставление более чем одного оборота "карусельной" системы бесполезно, поскольку в условиях стабильности условий ситуация повторяется. Идеальная продолжительность Δt - это, возможно, продолжительность, которая соответствует продолжительности комплексного маневра, такого как азимутальный поворот через фортевинд аэродинамической поверхности крыла.
Изобретение относится к системе и процессу автоматического управления полетом аэродинамических поверхностей силового крыла. Система (1) содержит средства (3, 5) обнаружения на борту и на земле, средство (7) обработки и управления первой (3а) и второй (5 а) порциями информации, выполненное с возможностью преобразовывать содержимое этой информации (3а, 5а) в механический привод, чтобы приводить в действие аэродинамическую поверхность (2) силового крыла по траектории и систему передачи этих первых (3а) порций информации в средство (7) обработки и управления. Процесс поэтапного автоматического управления полетом аэродинамической поверхности (2) силового крыла осуществляют при помощи системы (1). Достигается возможность управления полетом аэродинамических поверхностей крыла в системе «карусельного» типа. 4 н. и 32 з.п. ф-лы, 1 табл., 8 ил.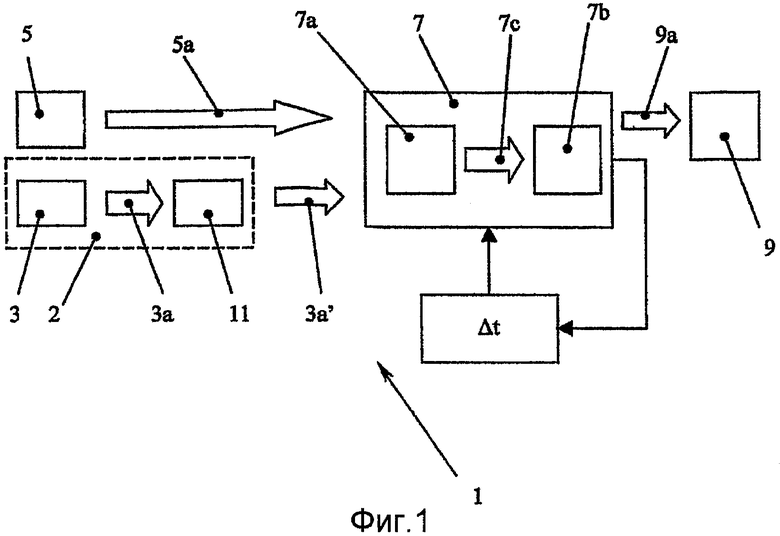
1. Система (1) для автоматического управления полетом, по меньшей мере, одной аэродинамической поверхности (2) силового крыла, причем упомянутая аэродинамическая поверхность (2) силового крыла управляется посредством приводного блока (9), оснащенного двумя лебедками, с которыми соединена упомянутая аэродинамическая поверхность (2) силового крыла посредством двух соответствующих приводных тросов (21), отличающаяся тем, что содержит: первое средство (3) обнаружения на борту упомянутой аэродинамической поверхности (2) силового крыла, выполненное с возможностью обнаруживать первые порции информации (3а), относящиеся, по меньшей мере, к одному положению и одной ориентации в пространстве упомянутой аэродинамической поверхности (2) силового крыла и ускорениям, которым подвергается упомянутая аэродинамическая поверхность (2) силового крыла, второе средство (5) обнаружения на земле, выполненное с возможностью обнаруживать вторые порции информации (5а), относящиеся, по меньшей мере, к одной величине натяжения упомянутых приводных тросов (21) упомянутой аэродинамической поверхности (2) силового крыла и к положению противовеса упомянутого приводного блока (9), средство (7) обработки и управления упомянутыми первыми (3а) и упомянутыми вторыми порциями информации (5а), выполненное с возможностью преобразовывать содержимое упомянутых порций информации (3а, 5а) в механический привод, оперирующий упомянутыми лебедками упомянутого приводного блока (9) для приведения в движение упомянутой аэродинамической поверхности (2) силового крыла по траектории TV1, TV2, ТV3,…, TVn полета, максимизирующей эффект "подъема", создаваемый на упомянутую аэродинамическую поверхность (2) силового крыла посредством ветрового потока W, в который он погружен, и максимизирующей величину кинетической энергии, вычитаемой в упомянутом ветровом потоке W, и систему передачи упомянутых первых порций информации (3а) в упомянутое средство (7) обработки и управления.
2. Система (1) по п.1, отличающаяся тем, что упомянутое средство (7) обработки и управления выполнено с возможностью обрабатывать упомянутые первые порции информации (3а), для того чтобы возвращать информацию (7 с) о положении, ускорении и ориентации упомянутой аэродинамической поверхности (2) силового крыла в блок (7b) числового программного управления, выполненный с возможностью оперирования (9а) упомянутыми лебедками упомянутого приводного блока (9) для управления силой тяги на упомянутых приводных тросах (21).
3. Система (1) по п.2, отличающаяся тем, что упомянутая система передачи передает упомянутые первые порции информации (3а) в упомянутое средство (7) обработки и управления.
4. Система (1) по п.1, отличающаяся тем, что упомянутое первое средство (3) обнаружения содержит трехосные акселерометры.
5. Система (1) по п.4, отличающаяся тем, что упомянутые трехосные акселерометры являются устройствами типа микроэлектромеханических систем (MEMS).
6. Система (1) по п.1, отличающаяся тем, что упомянутое первое средство (3) обнаружения содержит электронный компас.
7. Система (1) по п.6, отличающаяся тем, что упомянутый электронный компас является феррозондовым магнитометром.
8. Система (1) по п.4, отличающаяся тем, что каждый один из двух упомянутых трехосных акселерометров размещается на соответствующем конце упомянутой аэродинамической поверхности (2) силового крыла, рядом с соединением упомянутых приводных тросов (21) со стенками упомянутой аэродинамической поверхности (2) силового крыла.
9. Система (1) по п.1, отличающаяся тем, что упомянутое второе средство (5) обнаружения содержит тензодатчики, выполненные с возможностью измерения отклонения упомянутых приводных тросов (21).
10. Система (1) по п.1, отличающаяся тем, что упомянутое второе средство (5) обнаружения содержит кодеры на упомянутых лебедках упомянутого приводного блока (9).
11. Система (1) по п.1, отличающаяся тем, что упомянутое второе средство (5) обнаружения содержит бесконтактные датчики.
12. Система (1) по п.1, отличающаяся тем, что упомянутое второе средство (5) обнаружения содержит наземную систему искусственного зрения.
13. Система (1) по п.1, отличающаяся тем, что упомянутая аэродинамическая поверхность (2) силового крыла изготовлена из реологических полимеров.
14. Система (1) по п.1, отличающаяся тем, что упомянутое первое (3) и/или второе (5) средства обнаружения содержат виртуальные датчики.
15. Система (1) по п.1, отличающаяся тем, что упомянутая система передачи интегрирована в упомянутые приводные тросы (21) упомянутой аэродинамической поверхности (2) силового крыла посредством, по меньшей мере, одного оптоволокна передачи данных.
16. Система (1) по п.1 или 15, отличающаяся тем, что упомянутые приводные тросы (21) имеют сечение формы аэродинамической поверхности (2) силового крыла.
17. Система (1) по п.1, отличающаяся тем, что упомянутая система передачи относится к радиочастотному типу.
18. Система (1) по п.1, отличающаяся тем, что упомянутая система передачи относится к ультразвуковому типу.
19. Система (1) по п.1, отличающаяся тем, что упомянутая система передачи использует протокол управления однонаправленным непрерывным потоком.
20. Система (1) по п.1, отличающаяся тем, что упомянутая система передачи использует протокол пакетной передачи дейтаграмм.
21. Система (1) по п.1, отличающаяся тем, что упомянутая система передачи использует транспортный протокол асинхронного согласования.
22. Система (1) по п.1, отличающаяся тем, что она содержит средство (11) предварительной обработки, выполненное с возможностью выполнения предварительной обработки всех или части первых порций информации (3а) на борту упомянутой аэродинамической поверхности (2) силового крыла, для предоставления предварительно обработанных первых порций информации (3а').
23. Система (1) по п.1, отличающаяся тем, что она содержит, по меньшей мере, одну систему питания упомянутого первого средства (3) обнаружения и упомянутой системы передачи на борту упомянутой аэродинамической поверхности (2) силового крыла.
24. Система (1) по п.23, отличающаяся тем, что упомянутая система питания содержит фотоэлектрические тонкопленочные модули на пластиковой основе, наложенные на упомянутую аэродинамическую поверхность (2) силового крыла.
25. Система (1) по п.23, отличающаяся тем, что упомянутая система питания содержит одну ветровую микротурбину, подключенную к генератору с постоянными магнитами.
26. Процесс автоматического управления полетом, по меньшей мере, одной аэродинамической поверхности (2) силового крыла посредством системы (1) по любому из предшествующих пунктов, отличающийся тем, что он содержит этапы, на которых: а) обнаруживают упомянутые первые порции информации (3а) посредством упомянутого первого средства (3) обнаружения, относящиеся к текущему моменту траектории полета упомянутой аэродинамической поверхности (2) силового крыла, b) обнаруживают упомянутые вторые порции информации (5а) посредством упомянутого второго средства (5а) обнаружения, относящиеся к текущему моменту траектории полета упомянутой аэродинамической поверхности (2) силового крыла, с) отправляют посредством упомянутой системы передачи упомянутые первые порции информации (3а, 3а') в упомянутое средство (7) обработки и управления, d) отправляют упомянутые вторые порции информации (5а) в упомянутое средство (7) обработки и управления, е) из упомянутых первых (3а, 3а') и вторых порций информации непосредственно или косвенно получают значения, относящиеся, по меньшей мере, к одному текущему положению XY и одной текущей высоте полета упомянутой аэродинамической поверхности (2) силового крыла, к динамике упомянутого противовеса и к тяге на упомянутых приводных тросах (21), f) определяют параметры полета и управления, g) определяют относительный вес PQ, РC, PM, РZ1, PT для каждого одного из упомянутых параметров полета и управления, h) вычисляют для каждого одного из упомянутых параметров наилучшие координаты XY в следующие моменты времени Т0, T1, T2,…, Тn, i) вычисляют векторную сумму RX0Y0 всех координат в упомянутый момент времени Т0, j) вычисляют векторные суммы RX1Y1, RX2Y2,…, RXnYn для всех будущих моментов времени T1, T2,…,Tn, k) определяют и применяют временные веса РТ0, PT1, РТ2,…, РТn для упомянутых векторных сумм, 1) выбирают наилучшую одну из упомянутых векторных сумм RX1Y1, RX2Y2,…, RXnYn в качестве идеальной мгновенной координаты (цели), к которой стремится маневр упомянутой аэродинамической поверхности (2) силового крыла, m) выбирают наилучший путь траектории полета TV1, TV2, ТV3,…, TVn для направления упомянутой аэродинамической поверхности (2) силового крыла из текущего положения к упомянутой цели, n) направляют упомянутую аэродинамическую поверхность (2) силового крыла из упомянутой координаты упомянутого текущего положения к упомянутой цели, воздействуя на упомянутый приводной блок (9) посредством упомянутого блока (7b) числового программного управления, о) повторяют этапы а)-n) в каждом временном интервале Δt.
27. Процесс по п.26, отличающийся тем, что он содержит между этапом а) и этапом b) этап, на котором предварительно обрабатывают все или часть упомянутых первых порций информации (3а) посредством упомянутого средства (11) предварительной обработки для получения предварительно обработанных первых порций информации (3а').
28. Процесс по п.26, отличающийся тем, что упомянутыми параметрами полета и управления являются высота Q, динамика противовеса С, маневр М, запрещенные области ZI, тяга Т упомянутых приводных тросов (21).
29. Процесс по п.26, отличающийся тем, что упомянутый этап f) содержит этап, на котором определяют допуск для каждого одного из упомянутых параметров.
30. Процесс по п.26, отличающийся тем, что упомянутый этап m) использует инерциальную навигационную систему (INS), поддерживаемую динамической моделью упомянутой аэродинамической поверхности (2) крыла (FVM).
31. Процесс по п.26, отличающийся тем, что он содержит экстренный этап для указания аэродинамической поверхности (2) силового крыла, какой маневр должен быть выполнен с максимальным приоритетом.
32. Процесс по п.26, отличающийся тем, что он содержит этап, на котором корректируют с обратной связью упомянутые параметры полета и управления.
33. Процесс по п.26, отличающийся тем, что он содержит этап, на котором точно определяют упомянутый маневр посредством методик Хинфа и/или фильтров Калмана.
34. Процесс по п.26, отличающийся тем, что он содержит этап, на котором регулируют с обратной связью продолжительность упомянутого временного интервала Δt.
35. Применение системы (1) по любому из пп.1-25 совместно с "карусельной" системой (20).
36. Применение процесса по любому из пп.26-34 совместно с "карусельной" системой (20).
| RU 2002122781 A, 27.03.2004 | |||
| Способ и устройство для определения окончания процесса горячей вулканизации резиновых изделий | 1933 |
|
SU37530A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ-ПАРАСТАТ | 2001 |
|
RU2207303C2 |
| US 2002040948 A1, 11.04.2002 | |||
| US 6254034 B1, 03.07.2001. | |||

