Область изобретения
Изобретение относится к способу и системе для создания порций подаваемых объектов таким образом, чтобы порция удовлетворяла заданным критериям в отношении, например, пределов общего веса и, возможно, числа объектов, веса, ориентации и/или типа (типов) объектов, и где используются средства перемещения типа робота.
Предпосылки изобретения
Создание порций объектов, таких, например, как пищевые продукты, с получением порций, которые, например, удовлетворяют заданным критериям, касающимся, например, общего веса, хорошо известно в уровне технике, например из патента Великобритании GB 2116732, Европейского патентного документа ЕР 781172 и международной публикации WO 00/23771, в которых описаны системы, где пищевые объекты транспортируются на ленте конвейера и где объекты выборочно передаются к множеству приемных пунктов, где образуются порции.
Кроме того, использование роботов при создании порций объектов, таких как пищевые объекты, также предлагалось в известных системах.
Например, в международной публикации WO 95/35238 А описан способ и система для создания взвешенных порций пищевых объектов, где для переноса выбранных пищевых объектов к пластине носителя используется робот. Однако согласно этому документу робот и система выполнены таким образом, что робот собирает объекты один за другим и доставляет их к пластине носителя. Таким образом, робот способен только откладывать перенесенные объекты в одно место, находящееся вблизи него, и в том же порядке, в каком объекты поступают к роботу.
Кроме того, в статьях "Преимущества экспертных роботов: интеллект против искусства" ("Экспертные системы и роботы", Springer-Veriag Berlin Heidelberg, 1991) и "Упаковка продуктов птицеводства с помощью роботов" ("Роботы в обработке мяса, рыбы и птицы", Routledge, 1992) их автором K.Khodabandehloo предложено использование одного робота в системе создания порций. Оба эти документа предлагают использование робототехнической системы для упаковки свежих порций мяса птицы, и в особенности цыплят, с фиксированным весом и фиксированной ценой. Части цыплят, например грудки, механически взвешивают и информацию о весе передают компьютеру, управляющему робототехнической ячейкой. Компьютер управляет роботом таким образом, что заданный ряд частей, имеющих (по меньшей мере) заданный общий вес (при минимальном превышении веса), собираются на лотке. Для определения положения отдельных частей используются камеры, например, чтобы помочь роботу захватывать объекты.
Далее, в международной публикации WO 01/22043 описано использование робототехники для осуществления передачи объектов к выбранным приемным пунктам, где образуются порции.
Также в международной публикации WO 2005/106405 описано использование средств перемещения типа робота для перемещения пищевых продуктов к носителям порций, где пищевые продукты подают посредством конвейера и селективно перемещают к носителям порций на носителе порций, который перемещается параллельно конвейеру для пищевых продуктов.
Цель настоящего изобретения состоит в создании способа и системы для создания порций объектов, посредством которых обеспечивается более гибкое и эффективное создание порций по сравнению с указанными известными способами и системами.
Таким образом, целью настоящего изобретения является создание такого способа и такой системы, посредством которых может быть обеспечена более эффективная обработка создаваемых порций или упаковок.
Кроме того, целью настоящего изобретения является создание такого способа и такой системы, посредством которых выбранные объекты, которые нужно разделить на порции, могут быть помещены, например, с заданной и/или упорядоченной формой, в результате чего созданные порции могут обрабатываться далее, например паковаться и т д., без нарушения или вмешательства в форму или "схему" созданных порций.
В частности, целью изобретения является создание такого способа и такого устройства, которые подходят для отбора и размещения объектов, которые "составляют вместе единую группу" на требуемой упаковке, лотке и т.д. Такие объекты, о которых можно сказать, что они "составляют вместе единую группу", могут, например, быть объектами, которые вместе имеют заданную массу или вес (например, 1 кг), но могут использоваться также другие критерии. Таким примером может быть, например, упаковка, содержащая части цыпленка, например, приготовленные и годные для помещения в печь, при этом упаковка может содержать два бедрышка, две ножки ("барабанные палочки"), два крылышка и две грудки.
Кроме того, целью настоящего изобретения является создание такого способа и такого устройства, которые обеспечивают улучшения, по сравнению с известными системами, в отношении скорости, с которой поток объектов может передаваться к упаковочным средствам или средствам создания порции, в то же время обеспечивая возможность размещения объектов в эти средства в должном порядке.
Еще одной целью настоящего изобретения является создание такого способа и такого устройства, посредством которых облегчается эффективная обработка различных порций или упаковок, например порций, имеющих различный заданный вес.
Эти и другие цели достигаются посредством изобретения, описанного подробно далее.
Сущность изобретения
Изобретение относится к способу создания порций доставляемых объектов, так что порции удовлетворяют заданным критериям, например, относительно пределов общего веса и, возможно, числа объектов, веса, ориентации и/или типа (типов) объектов, в котором
определяют вес каждого объекта,
объекты транспортируют средствами транспортирования объектов,
выполняют выборочную передачу объектов от указанных средств транспортирования объектов к приспособлениям для создания порции посредством по меньшей мере одних средств перемещения типа робота при создании порции из объектов с учетом указанных заданных критериев,
причем указанные порции объектов создают на приспособлениях для создания порций, которые перемещают вокруг указанных по меньшей мере одних средств перемещения типа робота.
При этом достигается ряд преимуществ. Эффективность операции создания порций повышается, так как объекты могут передаваться таким образом, что эффективное время передачи может быть уменьшено по сравнению с известными способами и системами. Когда приспособления для создания порций перемещаются вокруг средств перемещения типа робота, расстояние от области сбора объектов может оставаться в заданных пределах, и средство перемещения типа робота должно только перемещаться от области сбора объектов к приспособлениям для создания порций, которые постоянно расположены в заданной области, в отличие от известных систем и способов, где приспособления для создания порций перемещаются прямолинейно вдоль направления транспортировки объектов, что означает, что средства перемещения должны перемещаться на относительно большое расстояние, например, подбирая объект, который поступил в область сбора объектов, и перемещая его к приспособлению для создания порций, которое находится на дальнем конце эффективной области доставки.
Кроме того, дальнейшее увеличение эффективности может быть достигнуто, когда учитывается ориентация объектов, например, когда объекты имеют отчетливую форму и должны быть помещены на приспособление для создания порций с заданной ориентацией и/или с определенной ориентацией по отношению к другим объектам. В таких случаях средство перемещения может управляться с обеспечением подбора или захвата выбранного объекта, когда существует подходящее отношение ориентации между объектом и предполагаемым приспособлением для создания порций (которое движется по окружности вокруг средства перемещения), в результате чего средство перемещения не нуждается в повороте объекта или нуждается только в повороте объекта на малый угол. В результате время и ресурсы, необходимые для поворота, например захватных средств робота, не требуются или, по меньшей мере, минимизируются.
Предпочтительно, как указано в п.2 формулы изобретения, указанное приспособление для создания порций может быть выполнено так, что вокруг указанных по меньшей мере одних средств перемещения типа робота перемещают несколько приспособлений для создания порций.
При этом может быть достигнута относительно простая конфигурация.
Предпочтительно, как указано в п.3 формулы изобретения, указанные приспособления для создания порции могут быть лотками или подобными средствами.
Согласно предпочтительному варианту, как указано в п.4 формулы изобретения, указанные приспособления могут располагать на носителе, например носителе, предназначенном для каждых из указанных по меньшей мере одних средств перемещения типа робота, при этом носитель (носители) выполнен (выполнены) с возможностью перемещения указанных приспособлений.
Предпочтительно, как указано в п.5 формулы изобретения, указанный носитель может быть выполнен с возможностью поворота указанных приспособлений по замкнутой траектории, например кругу, при создании порций.
При этом достигается то, что не требуется завершить создание порции в течение заданного ограниченного времени, соответствующего времени транспортировки на один оборот вокруг средств перемещения типа робота, но что создание порции может быть завершено оптимальным образом, например с минимальной недогрузкой, если указанное приспособление оставлено в контуре, и система может сделать так без необходимости выполнять любые дальнейшие операции или действия.
Предпочтительно, как указано в п.6 формулы изобретения, приспособления для создания порции могут перемещать вокруг указанных по меньшей мере одних средств перемещения типа робота с совершением более одного оборота при создании на указанном приспособлении порции из объектов.
При этом достигается, что нет ограничений на время, за которое может быть завершено создание конкретной порции, т.е. поскольку лоток может оставаться в контуре или петле вокруг робота столь долго, сколь это необходимо для того, чтобы дождаться появления одного или более нужных объектов, это завершит создание порции оптимальным образом, например с минимумом недобранного веса.
Согласно предпочтительному варианту, как указано в п.7 формулы изобретения, указанный носитель может содержать ряд сегментов, которые можно заменять, например при необходимости использовать приспособления для создания порции, имеющие различные размеры и/или типы.
Таким образом, изменение размеров лотка, например в соответствии с изменением размеров порции и/или размеров объектов, может быть выполнено относительно легко путем замены одних сегментов другими сегментами, относящимися к требуемым размерам, вместо модификации носителя или вместо замены всего носителя. Кроме того, при использовании сегментов носителя носитель может легко быть модифицирован, чтобы на нем можно было разместить приспособления для создания порций, имеющие различные размеры, и количество порций каждого размера, размещенных на носителе, может легко регулироваться.
В этом отношении следует заметить, что такой сегмент может содержать только одно место или отделение для приспособления для создания порций, например лотка. Но можно также понять, что их может быть два, три или более. Кроме того, понятно, что на одном и том же носителе могут использоваться указанные приспособления разных размеров, например, для создания различных порций (например, порций разных размеров и/или типов). Естественно, возможно также иметь только один тип и/или размер приспособлений для создания порций на одном и том же носителе.
Предпочтительно, как указано в п.8 формулы изобретения, указанный носитель может быть выполнен с возможностью удерживания указанных приспособлений, например лотков, при его перемещении.
При этом достигается, что при перемещении носителей приспособления для создания порции удерживаются прочно и точно.
Согласно предпочтительному варианту, как указано в п.9 формулы изобретения, указанный носитель может содержать удерживающие средства, выполненные с возможностью расцепления, например посредством расцепляющего механизма, при размещении лотка на носителе или при удалении готовой порции.
При этом достигается то, что приспособления для создания порции могут передаваться с носителей с относительной легкостью, когда создание порции завершено.
Согласно конкретному предпочтительному варианту, как указано в п.10 формулы изобретения, указанный носитель может быть выполнен с возможностью закрытия краев указанных приспособлений, например лотков, при создании указанных порций из объектов.
При этом достигается, что края приспособления для создания порции, например лотка, будут закрыты во время создания порции, что является важным в ряде применений и, в частности, когда это касается создания порции пищевых продуктов и им подобных. Так как эти объекты могут иметь влажную или мокрую поверхность, края приспособления для создания порции, например лотка, если они не закрыты и если объекты контактируют с краями во время создания порции, могут намокнуть или загрязниться. Кроме того, во время работы с объектами на края приспособления для создания порции, если те не закрыты, с объектов могут падать частицы, волокна, жир, влага, например капли, и т.д., в результате чего может происходить намокание и/или загрязнение этих краев. Это во многих случаях нежелательно, например, когда приспособления для создания порции, например лотки, упаковываются с помощью крышек, фольги и подобных элементов, присоединяемых к краям лотка, например сваркой, склеиванием, формованием и т.д., так как влага, жир и т.д. могут в результате привести к менее чем оптимальной упаковке. Таким образом, посредством этого варианта изобретения может также быть достигнут улучшенный процесс упаковки.
Согласно предпочтительному варианту, как указано в п.11 формулы изобретения, приспособление для создания порции после завершения создания порции может передаваться к средству дальнейшей транспортировки, обработки, упаковки и т.д.
Такая передача может быть облегчена многими способами, например путем использования рычага или подобного ему, для толкания или вытягивания созданной порции с носителя, когда соответствующее приспособление для создания порции располагается на одной линии со средством передачи, например с выдачным конвейером.
Предпочтительно, как указано в п.12, готовую порцию могут передавать с, например, носителя, возможно через промежуточное положение, вниз через, например, спуск к указанному средству дальнейшей транспортировки, обработки, упаковки и т.д.
При этом достигается компактное устройство.
Согласно предпочтительному варианту, как отмечено в п.13 формулы изобретения, пустое приспособление для создания порции могут передавать, например, к указанному носителю после удаления готовой порции.
При этом достигается повышенная эффективность, особенно если пустое приспособление для создания порции передают носителю относительно быстро, после того как готовая порция удалена, таким образом, обеспечивая создание порций с использованием максимального количества приспособлений для создания порции и, таким образом, увеличивая возможности селективно поместить конкретный объект.
Согласно следующему предпочтительному варианту, как указано в п.14 формулы изобретения, пустое приспособление для создания порции могут подавать от источника этих приспособлений, возможно через буферную зону.
Предпочтительно, как указано в п.15 формулы изобретения, объекты могут подаваться одним или несколькими рядами на указанном средстве транспортирования объектов к указанным по меньшей мере одним средствам перемещения типа робота.
Предпочтительно, как указано в п.16 формулы изобретения, область сбора объектов для каждых из указанных по меньшей мере одних средств перемещения типа робота могут задавать роботом и/или движущимся приспособлением для создания порции.
Предпочтительно, как указано в п.17 формулы изобретения, указанное создание порции могут осуществлять под управлением, например, центральной системы управления.
В этом отношении следует заметить, что такая центральная система управления будет получать входные данные, касающиеся отдельных объектов, например их вес, положение, цвет, форму и т.д., и что центральная система управления будет хранить траекторию этих объектов, а также приспособлений для создания порции, например положение на индивидуальном носителе, порции, к которым передаются объекты, данные, касающиеся отдельных порций, дальнейшая транспортировка и расположение готовых порций и т.д.
Предпочтительно, как указано в п.18 формулы изобретения, могут использовать несколько роботов, например два, три или более, причем у каждого из роботов соответственно могут быть собраны порции разных размеров и/или типов.
Предпочтительно, как указано в п.19 формулы изобретения, указанные приспособления могут непрерывно перемещать вокруг указанных по меньшей мере одних средств перемещения типа робота во время процесса создания порций, или, как указано в п.20 формулы изобретения, указанные приспособления могут не непрерывно перемещать, например шаг за шагом, вокруг указанных по меньшей мере одних средств перемещения типа робота во время процесса создания порций.
Согласно конкретному предпочтительному варианту, как указано в п.21 формулы изобретения, приспособления для создания порции, например лотки или подобные элементы, могут подаваться следующим образом:
подают приспособление для создания порции в начальное положение от источника этих приспособлений,
передают указанное приспособление из начального положения в рабочее положение с использованием выталкивающего средства,
возвращают указанное выталкивающее средство в положение ожидания, благодаря чему следующее освобожденное приспособление для создания порции приходит в указанное начальное положение.
При этом достигается, что приспособления для создания порции, например лотки, могут подаваться с использованием компактного расположения и таким образом, что, например, лоток легко позиционируется. Кроме того, достигается эффективное и быстрое распределение приспособлений для создания порции.
Предпочтительно, как указано в п.22 формулы изобретения, указанное следующее освобожденное приспособление могут освобождать из указанного источника либо при указанной передаче приспособления из начального положения в рабочее положение, либо при возвращении выталкивающего средства в положение ожидания.
Предпочтительно, как указано в п.23 формулы изобретения, указанное следующее освобожденное приспособление могут поддерживать по меньшей мере частью указанного выталкивающего средства во время по меньшей мере части указанного этапа передачи.
Предпочтительно, как указано в п.24 формулы изобретения, указанные выталкивающие средства работают с совершением возвратно-поступательного перемещения.
Изобретение, кроме того, относится к системе создания порций подаваемых объектов таким образом, что порция удовлетворяет заданным критериям, например в отношении пределов общего веса и, возможно, количества объектов, веса, ориентации и/или типа (типов) объектов, при этом система содержит:
средство определения веса каждого объекта,
средство транспортирования объектов,
приспособления для создания порции,
по меньшей мере одни средства перемещения типа робота, предназначенные для осуществления выборочной передачи объектов от указанного средства транспортирования к указанным приспособлениям при создании порций из объектов с учетом указанных заданных критериев,
причем указанные порции из объектов создаются на указанных приспособлениях, которые перемещаются вокруг указанных по меньшей мере одних средств перемещения типа робота.
При этом достигается ряд преимуществ. Эффективность системы создания порций увеличивается, так как объекты могут передаваться таким образом, что эффективное время передачи может быть уменьшено по сравнению с известными способами и системами. В то время как приспособления для создания порции движутся вокруг средств перемещения типа робота, расстояние от области сбора объектов может оставаться в заданных пределах, и средства перемещения типа робота должны только перемещаться от области сбора объектов к приспособлениям для создания порции, которые постоянно расположены в заданной области, в отличие от известных систем и способов, где приспособления для создания порции перемещаются прямолинейно вдоль транспортировки объектов, и это может приводить к тому, что средства перемещения вынуждены перемещаться на относительно большие расстояния, например, подбирая объект, который попал в область сбора объектов, и доставляя его к средству перемещения, которое находится на дальнем конце эффективной области доставки.
Предпочтительно, как указано в п.26 формулы изобретения, указанные приспособления могут быть расположены с обеспечением возможности перемещения нескольких приспособлений вокруг каждых из указанных по меньшей мере одних средств перемещения типа робота.
При этом достигается относительно простая конструкция системы.
Предпочтительно, как указано в п.27 формулы изобретения, указанные средства перемещения могут быть лотками или подобными средствами.
Согласно предпочтительному варианту, как указано в п.28 формулы изобретения, указанные приспособления для создания порции могут быть расположены на носителе, например носителе, предназначенном для каждых из указанных по меньшей мере одних средств перемещения типа робота, причем носитель (носители) предназначен (предназначены) для перемещения указанных приспособлений.
Предпочтительно, как указано в п.29 формулы изобретения, указанный носитель может быть выполнен с возможностью поворота указанного приспособления по замкнутой траектории, например по кругу, при создании порций.
При этом достигается то, что порция необязательно должна быть создана, например, в течение заданного времени, соответствующего времени совершения одного оборота вокруг средства перемещения типа робота, но что порция может быть создана оптимальным образом, например с минимумом недостающего веса, если она останется в контуре, и система может делать это без необходимости выполнять какие-либо другие операции или действия.
Предпочтительно, как указано в п.30 формулы изобретения, указанная система может быть выполнена с возможностью перемещения приспособления для создания порции вокруг указанных по меньшей мере одних средств перемещения типа робота с совершением более одного оборота при создании на указанном приспособлении порции из объектов.
При этом достигается то, что не существует ограничения на время, в течение которого должна быть создана конкретная порция, т.е. поскольку лоток может оставаться в контуре или петле вокруг робота столь долго, сколь это необходимо, чтобы дождаться появления одного или более подходящих объектов для подбора, что завершит создание порции оптимальным образом, например с минимумом недостающего веса.
Согласно конкретному предпочтительному варианту, как указано в п.31 формулы изобретения, указанный носитель может содержать несколько сегментов, которые могут заменяться, например при необходимости использовать указанные приспособления различных размеров и/или типа.
Таким образом, изменение размера лотка, например в соответствии с изменением размера порции и/или размера объекта, может быть осуществлено относительно легко, путем замены сегментов другими сегментами, соответствующими требуемому размеру, вместо того, чтобы выполнять модификации носителя, или вместо того, чтобы заменить весь носитель. Кроме того, при использовании сегментов носителя носитель может легко быть модифицирован, чтобы содержать порции различных размеров, и число порций каждого размера, размещенных на носителе, может легко регулироваться.
В этом отношении следует заметить, что такой сегмент может содержать только одно место или отделение для приспособления для создания порции, например лотка. Но нужно также понимать, что могут содержаться два, три или более мест или отделений. Кроме того, следует понимать, что на одном и том же носителе могут использоваться приспособления для создания порции, имеющие разные размеры, например для создания различных порций (например, порций различных размеров и/или типов). Естественно также иметь указанные приспособления только одного типа и/или одного размера на одном и том же носителе.
Предпочтительно, как указано в п.32 формулы изобретения, указанный носитель может содержать средство удержания указанных приспособлений, например лотков, например в виде удерживающего рычага, на который может воздействовать упругое средство.
При этом достигается то, что при перемещении носителей приспособления для создания порции удерживаются прочно и точно.
Преимущественно, как указано в п.33 формулы изобретения, средство удержания указанных приспособлений, например лотков, например в виде удерживающего рычага, может содержать расцепляющий механизм.
При этом достигается то, что приспособление для создания порции может быть передано с носителя с относительной легкостью, когда порция полностью готова.
Согласно конкретному предпочтительному варианту, как указано в п.34 формулы изобретения, указанный носитель может содержать средство закрытия краев указанных приспособлений, например лотков, например в виде бортиков пластинчатой части.
При этом достигается, что края приспособления для создания порции, например лотка, будут закрыты во время создания порции, что является важным в ряде применений и, в частности, когда это касается создания порции пищевых продуктов и им подобных. Так как эти объекты могут иметь влажную или мокрую поверхность, края приспособления для создания порции, например лотка, если они не закрыты и если объекты контактируют с краями во время создания порции, могут намокнуть или загрязниться. Кроме того, во время работы с объектами на края приспособления для создания порции, если те не закрыты, с объектов могут падать частицы, волокна, жир, влага, например капли, и т.д., в результате чего может происходить намокание и/или загрязнение краев. Это во многих случаях нежелательно, например, когда приспособления для создания порции, например лотки, упаковываются с помощью крышек, фольги и подобных элементов, присоединяемых к краям лотка, например сваркой, склеиванием, формованием и т.д., так как влага, жир и т.д. могут в результате привести к менее чем оптимальной упаковке. Таким образом, при использовании этого варианта выполнения изобретения может также быть достигнут улучшенный процесс упаковки.
Предпочтительно, как указано в п.35 формулы изобретения, указанная система может быть выполнена с возможностью передачи приспособления для создания порции после завершения создания порции к средству дальнейшей транспортировки, обработки, упаковки и т.д.
Такое устройство передачи может быть выполнено различными путями, например может содержать рычаг или т.п. для толкания или вытягивания готовой порции с носителя, когда соответствующее приспособление для создания порции расположено на одной линии со средством передачи, например выдачным конвейером.
Преимущественно, как указано в п.36 формулы изобретения, готовая порция может передаваться, например, с носителя, возможно через промежуточное положение, вниз через, например, спуск к указанному средству дальнейшей транспортировки, обработки, упаковки и т.д.
Предпочтительно, как указано в п.37 формулы изобретения, указанная система может быть выполнена с возможностью передачи пустого приспособления для создания порции к носителю после удаления готовой порции.
При этом достигается увеличенная эффективность, в особенности если пустое приспособление для создания порции передается к носителю относительно быстро после того, как готовая порция была удалена, таким образом, обеспечивая создание порций с использованием максимального количества приспособлений для создания порции и, таким образом, увеличивая возможности для селективного помещения конкретного объекта.
Согласно другому предпочтительному варианту, как указано в п.38 формулы изобретения, указанная система может содержать источник приспособлений для создания порции, при этом пустые приспособления распределяются из указанного источника, возможно через буферную зону, к носителю.
Предпочтительно, как указано в п.39 формулы изобретения, объекты могут подаваться одним или несколькими рядами на указанном средстве транспортирования объектов к указанным по меньшей мере одним средствам перемещения типа робота.
Преимущественно, как указано в п.40 формулы изобретения, область подбора объектов для каждых из указанных по меньшей мере одних средств перемещения типа робота может определяться роботом и/или движущимися приспособлениями для создания порции.
Предпочтительно, как указано в п.41 формулы изобретения, указанная система может содержать средство управления, например центральную систему управления, для управления указанным созданием порций.
Предпочтительно, как указано в п.42 формулы изобретения, указанная система может содержать несколько, например два, три или более, роботов, при этом у каждого из указанных роботов могут быть созданы соответственно порции разных размеров и/или типов.
Предпочтительно, как указано в п.43 формулы изобретения, указанные приспособления могут непрерывно перемещаться вокруг указанных по меньшей мере одних средств перемещения типа робота во время процесса создания порций, или, как указано в п.44 формулы изобретения, указанные приспособления могут перемещаться не непрерывно, например шаг за шагом, вокруг указанных по меньшей мере одних средств перемещения типа робота во время процесса создания порций.
Согласно конкретному предпочтительному варианту, как указано в п.45 формулы изобретения, указанная система может содержать устройство для распределения приспособлений для создания порции, например лотков и т.д., содержащее источник указанных приспособлений и выталкивающие средства, которые выполнены с возможностью передачи указанных приспособлений из начального положения в рабочее положение, причем указанное устройство выполнено с возможностью подачи приспособлений для создания порции в указанное начальное положение из указанного источника.
При этом достигается то, что приспособления для создания порции, например лотки, могут подаваться с использованием компактного устройства и таким образом, что лоток легко позиционируется. Кроме того, достигается эффективное и быстрое распределение.
Предпочтительно, как указано в п.46 формулы изобретения, указанное начальное положение может быть расположено ниже указанного источника указанных приспособлений для создания порции.
Предпочтительно, как указано в п.47 формулы изобретения, указанные выталкивающие средства могут быть выполнены с возможностью совершения при работе возвратно-поступательного движения.
Предпочтительно, как указано в п.48 формулы изобретения, по меньшей мере часть указанных выталкивающих средств может быть выполнена с возможностью прохождения под указанным источником во время передачи приспособления для создания порции из начального положения в рабочее положение.
Предпочтительно, как указано в п.49 формулы изобретения, указанное устройство может быть выполнено с возможностью освобождения приспособления для создания порции из указанного источника либо при передаче указанного приспособления из начального положения в рабочее положение, либо после завершения указанной передачи.
Предпочтительно, как указано в п.50 формулы изобретения, указанное устройство может содержать расцепляющий механизм для индивидуального освобождения указанного приспособления из указанного источника.
Согласно еще одному аспекту изобретение также относится к устройству для распределения и позиционирования/размещения/толкания упаковочных или поддерживающих элементов, например лотков и т.д., и к способу распределения и позиционирования таких упаковочных или поддерживающих элементов, например лотков и т.д.
Краткое описание чертежей
Изобретение подробно объяснено ниже со ссылками на чертежи, где
фиг.1 иллюстрирует схематически способ и систему согласно первому варианту, на виде сверху;
фиг.2 показывает один из вариантов изобретения на виде сверху, но с удаленными роботами;
фиг.3 соответствует фиг.2, но с показанными роботами;
фиг.4 показывает вариант, представленный на фиг.3, на виде сбоку;
фиг.5 показывает вид в аксонометрии варианта, показанного на фиг.3 и 4;
фиг.6 показывает вид в аксонометрии следующего варианта изобретения;
фиг.7 и 8 показывают приспособление для размещения и защиты согласно следующему варианту на видах в аксонометрии соответственно сверху и снизу;
фиг.9 показывает схематически на виде сбоку устройство для подачи лотка из стопки и его размещения;
фиг.10-11 иллюстрируют в соответствующих видах функционирование устройства для подачи лотка из стопки и его размещения, показанного на фиг.9;
фиг.12 показывает схематический вид следующего варианта передаточного устройства для готовых порций;
фиг.13 показывает систему создания порций, содержащую устройство подачи или распределения согласно следующему варианту изобретения, на виде сверху;
фиг.14 показывает систему создания порций, содержащую устройство подачи или распределения согласно еще одному варианту изобретения, на виде сверху.
Подробное описание изобретения
На фиг.1 представлен вид сверху системы создания порций объектов согласно одному из вариантов изобретения. Здесь объекты 1 доставляются посредством транспортировочного оборудования, содержащего два питающих конвейера 2 и 4, и объекты 1 подаются к взвешивающим устройствам 6 и 8, посредством которых определяется масса (или вес, как об этом будет указанно здесь). Следует заметить, что вес объектов может быть определен другими способами, чем реальное взвешивание, например путем измерения или определения объема каждого объекта и вычисления массы. Информация, касающаяся отдельных масс, регистрируется, например, посредством центрального управляющего блока 92. Как показано на чертеже, центральный управляющий блок 92 указанной системы получает ряд входных управляющих сигналов 94а-94n и выполнен с возможностью передачи ряда выходных управляющих сигналов 96а-96m для управления различными элементами и частями системы, как это понятно специалистам. Кроме того, следует заметить, что в системе могут содержаться локальные блоки управления.
Объекты после определения их веса или массы транспортируются далее средством 10 транспортировки объектов в виде, например, конвейерной ленты. Регистрация положения и, возможно, ориентации и/или типа объектов выполняется посредством, например, оптической системы, сканирующих средств и т.п. (не показаны), и информация регистрируется посредством центрального блока управления. Таким образом, система в любое время будет знать положение, вес и, возможно, также ориентацию и/или тип каждого объекта, который попал на средство 10 транспортирования объектов и транспортировался далее, например, на основе скорости конвейера и т.д. Определение положения и т.д., например, посредством сканирующего оборудования может происходить ранее, например до определения массы или одновременно с этим. Однако это может привести к ошибочным данным относительно положения объектов, так как положение и/или ориентация объектов могут измениться, когда они передаются от одного конвейера к следующему, например от ленты взвешивающего устройства 6 к конвейерной ленте средства 10 транспортировки объектов. Например, объект может в течение короткого периода замедляться при прохождении промежутка между конвейерами, в результате чего действительное положение этого объекта находится слегка позади положения, которое рассчитано центральным управляющим блоком на основе скорости конвейера (конвейеров), или же объект может быть сдвинут слегка вбок, когда проходит этот промежуток.
Средство 10 транспортировки объектов может, как показано на чертеже, быть в виде одиночной относительно широкой конвейерной ленты, что по практическим причинам может быть предпочтительным, но понятно, что также могут использоваться две или более отдельные конвейерные ленты, расположенные рядом друг с другом.
Создание порций объектов, принадлежащих совокупности, например совокупности частей цыпленка с заданным весом, выполняется путем помещения объектов 1 на приспособления 14 для создания порции, такие как, например, лотки, средства упаковки или подобные им, которые в иллюстрированном варианте, как будет объяснено позже, расположены с возможностью их перемещения вокруг области сбора на средстве 10 транспортировки объектов, например перемещения по замкнутому контуру, который может быть круглым, полукруглым, псевдокруглым и т.п. Приспособления для создания порции могут двигаться, находясь на носителе 16, как показано на чертеже, который вращается вокруг, например, области сбора объектов, как показано на фиг.1 только для робота 22. Заметим также, что ради простоты на носителе 16 показаны только несколько приспособлений 14. Как будет объяснено позже, созданные порции 26 передаются от носителя и могут транспортироваться далее, например, для упаковки и т.д. выдачным конвейером 12.
Объекты 1 перемещаются со средства 10 транспортировки объектов в приспособления 14 с использованием одного или более средств перемещения типа роботов, или роботов, как они далее называются. Когда говорится о роботах или средствах перемещения типа роботов, понятно, что такие роботы относятся к типу, имеющему по меньшей мере три степени свободы, что означает, например, что роботы работают в эффективной рабочей области (т.е. в плоскости X-Y) и что роботы предназначены захватывать или подбирать объект и помещать его в пределах эффективной рабочей области (т.е. также работая в направлении Z). Кроме того, заметим, что используемые роботы относятся к типу, имеющему, например, захватывающий или собирающий элемент для поднятия объектов или предметов и управляемую систему движения для передачи захваченного или подобранного объекта или предмета в выбранное положение. Эти роботы управляются центральным блоком управления для порционной подачи объектов на основе информации, доступной системе, относящейся к массе и положению объектов, доступных для порционной подачи, массе объектов, возможно уже помещенных на приспособление 14 в незавершенных порциях, и требуемых параметров для порций.
На фиг.1 показаны три таких робота, которые используются с эффективной областью работы каждого из них, т.е. 20, 22 и 24 соответственно. Предполагается, что каждый робот способен работать в круглой, по существу, области, т.е. захватывать или подбирать объект 1 со средства 10 транспортировки объектов и помещать его на приспособления 14, например лотки, которые перемещаются вокруг области сбора посредством носителя 16 (как показано на фиг.1 только для робота 22 и для простоты только с несколькими приспособлениями 14, показанными на носителе 16). Понятно, что возможны другие формы эффективной рабочей области, в зависимости от типа робота и/или управляющего оборудования. Таким образом, роботы служат для селективного перемещения объектов со средства 10 транспортировки объектов и помещения их порциями на приспособления 14, возможно в упорядоченной форме, например, с учетом заданных требований и/или чтобы достигнуть того, чтобы объекты, помещенные в упаковку, возможно после передачи с конвейера, имели хороший привлекательный вид.
Когда приспособления 14 движутся по замкнутой круговой траектории, например перемещаются на носителе 16, оптимальное согласование может быть получено для большинства типов роботов, которые в большинстве случаев имеют эффективную рабочую область, которая также является по существу круглой. Таким образом, может быть использован робот, который имеет рабочую область, соответствующую точно размеру и форме носителя 16, которая существенно отличается от известных систем, где часто должен использоваться робот, способный выходить за пределы большинства из положений создания порций, но где одно или более из таких положений требовали такой возможности, что порождало в известных системах необходимость в роботе больших размеров.
Кроме того, заметим, что объекты 1, показанные пунктирными линиями на чертежах, являются только примерами и что реальные размеры, расстояния и/или ориентации могут изменяться, как и размеры составных частей, например конвейеров, содержащихся в системе.
Конкретный вариант изобретения ниже рассмотрен со ссылкой на фиг.2-5, где показана система, содержащая два средства перемещения типа робота, но где не показано транспортирующее оборудование для подачи объектов, взвешивающие средства, сканирующие средства и т.д.
Как показано на фиг.2, которая изображает систему для создания порций подаваемых объектов на виде сверху, но без показа роботов, средство для транспортировки объектов, например конвейер 10, расположено ниже двух носителей 16 для перемещения ряда приспособлений 14, например лотков, вокруг соответствующих областей сбора объектов, где в цепях иллюстрации показаны четыре объекта 1, готовые для того, чтобы их подняли роботы и отправили в выбранный лоток 14. Понятно, что четыре объекта, которые на фиг.2 показаны расположенными в области сбора для робота 20 (слева на фиг.2), конечно, не должны все быть выбраны и переданы в приспособление 14, расположенное на носителе 16 вблизи этого робота 20. Подобным образом, понятно, что хотя даже четыре объекта аналогично показаны расположенными в области сбора робота 22, и предполагая, что конвейер 10 движется направо на фиг.2, нормально некоторые из объектов будут подобраны на предыдущей области (областях). Как показано на чертеже, каждый носитель 16 может содержать 12 лотков, но понятно, что может содержаться меньшее или большее количество лотков, в зависимости, например, от размеров требуемых порций, размеров объектов, типа робота и т.д. Как показано на чертеже, носитель 16 справа на фиг.2, т.е. носитель 16, относящийся к роботу 22, может содержать ряд сегментов, например всего четыре, из которых для простоты только два сегмента 16а и 16b будут рассматриваться ниже и которые составляют полный круглый носитель. Таким образом, изменение размера лотка, например в соответствии с изменением размера порции и/или размера объекта, может быть осуществлено относительно легко путем замены сегментов, например 16а и 16b, сегментами, имеющими требуемые размеры. Один сегмент может содержать одно или более приспособлений для создания порций. Как показано на чертеже, носитель 16 может иметь средства 18, например стенки, ребра, возвышения и т.п., для расположения отдельных лотков, таким образом, обеспечивая точное размещение объектов роботом по отношению к лотку.
Носитель 16 может также быть устроен таким образом, что он может содержать или поддерживать лотки различных размеров и/или типов. Например, носитель может содержать ряд колец или кольцевых элементов, которые бы могли смещаться, чтобы поддерживать лотки разных размеров.
Как объяснено выше, система создания порций позволяет роботам выбирать объекты и помещать их на выбранное приспособление 14 или в него, в то время как эти приспособления 14, например лотки (далее по тексту лотки), движутся на соответствующем расстоянии от робота, например, вдоль круглой направляющей, как показано на чертеже. Такая конструкция не накладывает ограничений на время, в течение которого конкретная порция может быть создана полностью, т.е. так как лоток может оставаться в контуре или петле вокруг робота столь долго, сколь это необходимо, чтобы дождаться появления одного или более подходящих объектов, которые завершат создание порции оптимальным образом, например с минимумом недобранного веса.
Кроме того, система содержит устройство 30 передачи, предназначенное для передачи полностью готовых порций и пустых лотков 14. Как показано на чертеже, такое устройство передачи может быть общим устройством для обоих носителей 16. В дальнейшем функция устройства передачи будет объяснена со ссылкой на носитель 16 слева на фиг.2, т.е. носитель, относящийся к роботу 20. Когда приспособление 14 содержит готовую порцию, эта порция может быть удалена с носителя 16 посредством передаточного устройства 32, например телескопического рычага, управляемого системой управления, когда порция находится в соответствующем положении. Устройство 32 может, как показано на чертеже, содержать упор, рычаг или т.п., который обычно располагается на внутренней периферии носителя и который перемещается в наружном направлении, когда порция удаляется с носителя 16. Ниже описаны другие варианты такого передаточного устройства. Как объяснено ниже, готовые порции передаются на конвейер 12 для дальнейшей транспортировки, обработки, упаковки и т.д. Как показано на чертеже, носитель 16 может быть выполнен с возможностью перемещения в направлении против часовой стрелки, и пустое место на носителе через короткое время будет находиться в положении около устройства 34 передачи для пустых лотков. Таким образом, новый лоток, т.е. приспособление 14, может быть помещен на свободное место посредством этого передаточного устройства 34, которое также может быть телескопическим рычагом, управляемым системой управления. Лотки могут доставляться от источника 38, который может быть общим для обоих носителей, и могут доставляться через буферную зону 36 для пустых лотков.
Фиг.3 соответствует фиг.2, но на фиг.3 показаны роботы 20 и 22, а также рама 40, поддерживающая, например, роботы и другие части системы. Роботы могут быть легко доступного типа, например роботы, поставляемые фирмой Asea Brown-Boveri (ABB).
Фиг.4 изображает предложенную систему на виде сбоку, показывая конфигурацию роботов. Однако также могут использоваться роботы других типов, например погрузочные средства, имеющие по меньшей мере три степени свободы.
Фиг.5 показывает указанную систему в аксонометрии. Здесь можно видеть, как готовая порция может быть передана на конвейер 12 для дальнейшей транспортировки, после того как она была удалена с носителя 16 устройством 32. Как показано на фиг.5 применительно к носителю, находящемуся справа, т.е. соответствующему роботу 22, готовая порция 26, например лоток, содержащий отобранные объекты, может транспортироваться на конвейер 12 через спуск 42 или подобный ему. Например, приспособление 14, которое содержит готовую порцию, может быть передано поддерживающему средству 42, находящемуся на том же уровне, что и носитель 16. Поддерживающее средство 42 может затем быть наклонено вниз, как показано на фиг.5, благодаря чему лоток с готовой порцией сможет соскользнуть вниз на конвейер 12. Другие способы передачи готовых порций к выдачному конвейеру также очевидны для специалистов, например путем передачи готовой порции с носителя 16 непосредственно, например, на выдачной конвейер, расположенный, например, поперечно к носителю.
Фиг.6 показывает вид в аксонометрии другого варианта предложенной системы. Признаки, которые уже были объяснены выше, не будут подробно объясняться здесь. Однако здесь ясно виден спуск или наклоняющаяся опора 42 для направления готовых порций вниз к конвейеру 12. Средство 10 для транспортировки объектов, например конвейер, с которого объекты 1 собираются или захватываются, согласно этому варианту выполнено с поверхностью, имеющей элементы, например пластинки или ребра, которые приподнимают объекты от основания конвейера, позволяя, таким образом, захватывать объекты, например поднимать их некоторыми средствами, например вилочными захватами или элементами в виде пальцев, которые могут быть подведены под объекты. Как показано на фиг.6, пластинки или ребра могут проходить в направлении, поперечном конвейеру, но понятно, что вместо этого они могут проходить в продольном направлении. Кроме того, понятно, что средство транспортировки объектов может быть выполнено в виде конвейерной ленты, содержащей множество параллельных струн или шнуров, например поликордовый конвейер (конвейер, на котором вместо ленты используются несколько параллельных бегущих шнуров). В этом отношении следует заметить, что роботы могут в соответствии с изобретением быть оборудованы различными захватывающими или собирающими средствами, например поднимающими, захватывающими, всасывающими средствами и т.д., которые могут заменяться, например, в зависимости от типа объектов.
На фиг.6 ради простоты показан только один робот 20, но понятно, что к каждому носителю 16 относится свой робот.
В примерах, описанных выше, использовались два или три робота, но система может содержать только один робот или более трех роботов. Кроме того, представляется, что, когда используется несколько роботов и соответствующих носителей, на соответствующих носителях могут собираться порции разных размеров и/или типов и носители могут быть, как это описано выше, снабжены приспособлениями 14, например лотками, разных размеров. Кроме того, если готовы различные порции, например, одного размера или типа для одного робота и другого размера или типа для другого робота, эти порции могут легко транспортироваться таким образом, что они не могут смешиваться, например, при использовании двух или более конвейеров 12.
На фиг.2-6 варианты выполнения системы показаны с устройством подачи или распределения для пустых приспособлений для создания порций, например устройством 38, которое является общим для двух носителей 16 и их соответствующих роботов. Очевидно, такое подающее или распределительное устройство для пустых приспособлений, таких как лотки (далее по тексту лотки), может также служить источником или распределителем для более чем двух носителей и соответствующих роботов, например трех, четырех или более. Однако устройство подачи или распределения может подавать, например, лотки только к одному носителю и соответствующему роботу или только к нескольким из носителей и соответствующих роботов, в случае когда система содержит более двух носителей и соответствующих роботов. В общем случае каждый носитель и соответствующий робот могут иметь отдельное устройство подачи или распределения. Заметим также, что размер и/или тип приспособлений 14 может отличаться и что, например, каждое устройство подачи или распределения может быть выполнено с возможностью работы с определенным размером и/или типом лотка. Кроме того, заметим, что к носителю и соответствующему роботу может относиться не одно подающее или распределительное устройство, а несколько таких устройств и что, например, каждое устройство может работать с лотками разных размеров. Если, например, рассматривается вариант, показанный на фиг.2, очевидно, что он может быть модифицирован, чтобы содержать два отдельных устройства подачи или распределения лотков, одно, относящееся к роботу 20, а другое, относящееся к роботу 22. Кроме того, очевидно, что распределительные устройства могут подавать лотки разных размеров, например большого размера для робота 20 и малого размера для робота 22. Однако один или оба этих робота могут быть оборудованы другим распределительным устройством, которое, например, может быть помещено с другой стороны носителей, например в верхней части фиг.2, и что такое распределительное устройство другого типа может подавать лоток другого размера, чем первое распределительное устройство, например, в случаях, где на одном и том же роботе создаются порции различных размеров, как это будет объяснено более подробно ниже. Более чем два, например три, четыре и т.д., различных распределительных устройств могут также относиться к носителю и соответствующему роботу, например помещены вдоль периферии носителя, таким образом, делая возможным доставку приспособлений для создания порций трех или более различных размеров и/или типов к носителю/роботу. Также понятно, что вариант, показанный на фиг.2, который имеет общее подающее или распределительное устройство, может быть дополнен другим общим подающим или распределительным устройством, помещенным на другой стороне носителей/роботов, т.е. в верхней части фиг.2. Таким образом, одно распределительное устройство может, например, подавать лотки больших размеров, в то время как другое устройство может, например, подавать лотки малых размеров. Одно распределительное устройство может подавать лотки к одному или обоим роботам, и то же самое относится к другому распределительному устройству. Специалисту понятно, что возможны многочисленные другие конфигурации и/или комбинации.
Заметим, однако, как это было показано выше, что на одном и том же роботе могут создаваться порции различных размеров и/или типов, например в случаях, где используется только один робот и один носитель. Здесь приспособления 14 различных размеров, например лотки, могут быть помещены на носителе 16 в различных положениях, которые регистрируются системой управления, благодаря чему робот может управляться с обеспечением передачи выбранных объектов или предметов к соответствующим лоткам, чтобы завершить требуемые различные порции. Понятно, что система будет регистрировать положение каждого из лотков, когда они движутся вокруг робота. Когда различные приспособления для создания порции, например лотки, используются на одном и том же носителе 16 и носитель содержит ряд сегментов, например 16а и 16b, лотки различных размеров могут быть отнесены к разным сегментам. Но понятно также, что лотки различных размеров могут быть помещены на носителе в случайном порядке, поскольку система управления регистрирует положение, в которое каждый из лотков помещен этой системой.
Кроме того, в примерах, приведенных выше, были показаны объекты, доставляемые в два ряда, расположенные рядом друг с другом на средстве 10 транспортировки объектов, но понятно, что объекты могут доставляться любым другим подходящим способом, например тремя или более рядами или в нерегулярном порядке.
Когда два или более роботов 20, 22, 24 используются согласно изобретению, они управляются системой с обеспечением совместного участия в создании порций оптимальным способом, например посредством создания порций, которые имеют минимум недобранного веса и оптимальным образом удовлетворяют заданным критериям. Таким образом, робот, расположенный первым в направлении потока объектов, необязательно будет управляться с обеспечением захвата конкретного объекта, когда этот объект находится в области сбора для первого робота, если системой управления определено, что этот конкретный объект может завершить порцию на втором роботе таким образом, что, например, весовой критерий будет выполнен с минимальным избытком для этой порции, и/или если признается, что другой подходящий объект находится на пути к первому роботу и/или с большой уверенностью можно рассчитывать, что он появится в определенных пределах времени. Таким образом, понятно, что роботы управляются системой управления с обеспечением их совместной работы для достижения оптимального результата и что система, содержащая ряд роботов, благодаря такой кооперации достигнет лучших результатов, чем система, содержащая только одного робота.
Кроме того, следует заметить, что может быть создано средство облегчения чистки инструмента, расположенного на кончике робота, например инструмента для захвата, подъема или всасывания. Например, может быть отведено место сбоку от конвейера 10, но внутри рабочей области робота, в частности, если носитель смещен по отношению к конвейеру 10, где может быть расположен инструмент для чистки, благодаря чему может выполняться регулярная чистка, когда робот перемещает инструмент к месту чистки. Кроме того, робот может иметь два подобных инструмента и может менять эти инструменты, например поместить один инструмент на место для чистки, благодаря чему он может очищаться, в то время как другой инструмент используется для создания порции, и наоборот.
Следующий предпочтительный вариант изобретения описан дальше со ссылкой на фиг.7 и 8, которые показывают приспособление для размещения и защиты, которое в целом обозначено номером 50, на видах в аксонометрии соответственно сверху и снизу. Это приспособление 50 служит ряду целей, что объяснено далее, но в целом оно может замещать средства 18 размещения приспособлений для созданий порции на носителе 16, показанных на фиг.2-6.
Как показано на чертеже, приспособление 50 содержит пластинчатую часть 52 (см. фиг.7), которая имеет по существу вертикальные боковые части 54 и 58 и концевую часть 56. Боковые части 54 и 58 сделаны со средствами 60 поддержки и крепления, предназначенными для присоединения приспособления 50 к носителю 16. Общая форма пластинчатой части 52 такова, что несколько этих приспособлений 50 может быть помещено по существу в виде круга или многоугольника на носителе 16. Таким образом, пластинчатая часть 52 имеет меньшую ширину на одном конце, например на концевой части 56, чем на другом конце, и может быть выполнена в виде сегмента.
Приспособление 50 имеет отверстие 68 в пластинчатой части 52, по существу, соответствующее форме части приспособления 14, например лотка, куда помещаются передаваемые объекты 1. Как показано на чертеже, это отверстие 68 ограничено по контуру частями 62, 64 и 66 в пластинчатой части 52. Отверстие 68, как показано на фиг.7 и 8, выполнено в виде выреза, например отверстия, которое проходит в пластинчатую часть 52 от внешнего конца, например более широкого конца, но можно понять, что здесь может также быть расположен бортик, таким образом, делая отверстие 68 окруженным бортиками со всех сторон.
Как показано на фиг.8, приспособление 50 содержит концевые стопорные средства 70, расположенные на нижней стороне пластинчатой части 52 на заданном расстоянии от края бортика 64. Эти концевые стопорные средства 70 могут быть в виде одного или более штифтов, как показано на фиг.8, или других подобных средств, выполняющих ту же функцию, как будет объяснено позже. Кроме того, приспособление 50 имеет удерживающий рычаг 74, который, как показано на чертеже, может крепиться с помощью шарнира 72, присоединенного к пластинчатой части 52.
Удерживающий рычаг 74 может поворачиваться и может управляться посредством механизма 78 размыкания, и на удерживающий рычаг 74 воздействует упругое средство 80 (см. фиг.8), как будет объяснено далее.
Как объяснено выше, приспособление 50 может использоваться вместо размещающих средств 18, показанных, например, на фиг.2. Таким образом, эти приспособления 50 помещаются на носителях 16, так что отверстия 68 соответствуют местам, где находятся приспособления для создания порции, такие как лотки 14. Понятно, что приспособления 50 могут использоваться в виде, показанном на фиг.7 и 8, т.е. каждое предназначено для размещения одного лотка 14, или они могут соединяться друг с другом, например, соответственно сегментам 16а и 16b, показанным на фиг.2, причем каждое способно содержать три или другое количество лотков 14.
Приспособления 50, как показано на фиг.7 и 8, предназначены для размещения приспособлений для создания порции, например лотков (далее по тексту лотки), по существу прямоугольных, в соответствии с лотками, показанными на фиг.2. Когда лоток передается в приспособление 50, например, посредством устройства 30 передачи, одна сторона лотка будет упираться в боковую часть 54, торец лотка будет упираться в концевое стопорное средство 70, а другая сторона лотка будет удерживаться удерживающим рычагом 74. Когда лоток скользит в приспособление 50, например, при помощи устройства 30 передачи, удерживающий рычаг 74 может быть повернут в направлении боковой части 58, например посредством размыкающего механизма 78, например рычага, который может быть приведен в действие посредством кулачка или подобного ему (не показано на фиг.7 и 8). Когда лоток 14 соскользнул в приспособление 50, например так, что один его конец упирается в концевое стопорное средство 70, размыкающий механизм 78 деактивируется, благодаря чему удерживающий рычаг 74, например, вследствие влияния упругого элемента или по другой причине, может упираться в лоток, таким образом, также толкая последний к боковой части 54, благодаря чему этот лоток располагается в положении создания порции на носителе 16. Удерживающий рычаг 74 может быть прижат к лотку упругим средством 80, которое может быть в виде упругого рычага или подобного ему, присоединенного, например, к боковой части 58, как показано на фиг.8, и выполненного из гибкого материала, такого как каучук или подобные материалы.
Понятно, что удерживающий рычаг 74 служит для размещения лотка с необходимой точностью и, кроме того, удерживающий рычаг 74 служит для удерживания лотка в этом положении, когда носитель 16 движется вокруг области сбора, например, поддерживая лоток упертым в концевое стопорное средство 70 и боковую часть 54, а также когда на лоток 14 воздействует робот, помещающий объекты в/на него, когда центробежная сила действует на лоток благодаря вращению носителя 16. В этом отношении следует заметить, что особое преимущество изобретения основывается на том факте, что лоток может быть быстро передан носителю 16, так как удерживающий рычаг 74 отворачивается от его удерживающего положения, позволяя лотку быстро и беспрепятственно скользить в приспособление 50. Кроме того, следует заметить, что при использовании изобретения приспособления для создания порции могут быстро транспортироваться вокруг области сбора, например, когда порция полностью собрана, и где важно, что эта порция быстро передается от носителя, и новое приспособление для создания порции, например лоток, вставляется, чтобы поддерживать заполнение носителя. Таким образом, будет понятно, что это приспособление (далее лоток) может транспортироваться с относительно высокой угловой скоростью, результатом чего может быть относительно высокая центробежная сила, действующая на лотки, но что лотки будут удерживаться в заданных положениях благодаря действию удерживающего рычага 74, но что в соответствии с этим вариантом можно будет удалять и вставлять лоток быстро.
Таким образом, когда порция собрана в/на лотке и когда носитель расположен в заданном положении около устройства 30 передачи, лоток может легко быть удален, например оттянут или оттолкнут от носителя 17, или расцепляющий механизм 78 может быть активирован, например, посредством кулачка или подобного механизма (не показан), в результате чего удерживающий рычаг 74 поворачивается против действия упругого элемента устройства 80, от лотка с готовой порцией, который теперь может быть легко удален посредством устройства 30 передачи, и пустой лоток может легко быть продвинут в приспособление 50, как объяснено выше.
Еще одно преимущество варианта, показанного на фиг.7 и 8, основывается на том, что отверстие 68 может иметь такие размеры, что бортики, например, 62, 64 и 66 могут закрывать края лотка 14, который используется как приспособление для создания порции. При использовании конструкции, показанной на фиг.2, края лотка 14 открыты, и когда происходит создание порций и объекты передаются к лотку, робот может поместить объект таким образом, что часть объекта, прежде чем попадет в лоток, будет контактировать с краем лотка. Так как предложенные способ и система, в частности, относятся к созданию порций пищевых продуктов и так как эти предметы могут иметь влажную или мокрую поверхность, края лотка могут стать влажными или грязными. Кроме того, во время обработки объектов с них на края лотка могут падать частицы, волокна, жир, влага, например капли, и т.д., таким образом, способствуя увлажнению и/или загрязнению краев. Это во многих случаях нежелательно, например, когда приспособления для создания порции, например лотки, упаковываются с использованием крышек, фольги и т.п., которые присоединяются к краевым частям этого приспособления, например сваркой, склейкой, формовкой и т.д., так как влага, жир и т.д. могут в результате привести к упаковке, которая хуже оптимальной. Таким образом, вариант изобретения, приведенный на фиг.7 и 8, улучшает процесс упаковки, так как края приспособления для создания порции, например лотка, будут закрыты во время создания порции.
Заметим, однако, что сегменты, например, 16а и 16b, описанные со ссылкой на фиг.2, 3, 5 и 6, могут также быть выполнены с краями, которые закрывают края лотка, когда он помещен на носитель 16, благодаря чему вышеуказанный желательный эффект будет также достигнут с этими вариантами.
Понятно, что приспособление 50 может иметь разные размеры, например, отверстия 68 могут иметь разные размеры, и что приспособление 50 может быть сменным, и что приспособления 50 различных размеров могут использоваться вместе на носителе 16 в соответствии с тем, что было объяснено выше в связи с другими вариантами, например, для того, чтобы можно было собирать порции разных размеров на одном и том же носителе 16.
Таким образом, можно видеть, что приспособление 50 может быть аналогично сегментам 16а и 16b, описанным в связи с фиг.2, 3, 5 и 6, когда они предназначены для размещения единственного приспособления для создания порции, например лотка.
Устройство передачи для пустых приспособлений для создания порции, например лотков (далее лотков), может согласно одному из аспектов изобретения содержать распределительное и позиционирующее устройство для лотков, которое описано ниже со ссылкой на фиг.9 - 11. В этом отношении заметим, что, в целях этого использования, названия "загрузчик лотков", "распределитель лотков", "отделитель лотков" будут использоваться для подобных устройств, посредством которых лотки могут подаваться один за другим из штабеля, магазина или хранилища лотков. Фиг.9-11 иллюстрируют на схематических видах последовательные операции распределительного и позиционирующего устройства 101 для лотков, или устройства для распределения и позиционирования/размещения/толкания упаковочных или поддерживающих элементов, как об этом будет говориться далее.
Заметим, что, когда говорится о лотках или подобных элементах, понятно, что это касается упаковочных или поддерживающих элементов, которые могут иметь широкое разнообразие форм и могут использоваться для широкого круга приложений, например в связи с созданием порций широкого разнообразия объектов или в связи с упаковкой, обработкой и т.д. предметов, материалов и т.д. в целом.
Устройство 101, показанное на фиг.9-11, содержит хранилище или магазин 103 для размещения источника 104 лотков или подобных элементов, которые располагаются на расстоянии от горизонтальной опоры 112, причем указанное расстояние соответствует необходимой высоте для правильного функционирования выталкивающего средства, которое описано ниже.
Устройство 101 расположено рядом с устройством, которому должны быть переданы лотки, например рядом с системой для создания порций, как описано выше, или конвейерной лентой, или аналогичным средством, которые служат для поддержки и/или транспортировки лотков, когда один или более объектов помещаются на каждый из ряда лотков. Как показано на фиг.9, для размещения лотка отводится отделение или место 110, например свободное место на конвейерной ленте, определенное место на носителе, таком как вращающийся поворотный стол или подобное устройство. Понятно, что распределитель лотков служит для передачи лотка в такое отделение или место 110, предпочтительно как только отделение или место становится свободным, т.е. как только лоток, который получил предназначенный объект (объекты), удален, и отделение или место 110 находится рядом с устройством 101. Можно видеть, что желательно, чтобы распределительное устройство было способно передавать лоток быстро, и предпочтительно во время перемещения указанного отделения или места.
Устройство 101 содержит выталкивающие средства, которые выполнены с возможностью возвратно-поступательного перемещения между одним положением, как показано на фиг.9, например положением ожидания, и другим положением, как показано на фиг.10, где устройство вытолкнуло лоток 105 в отделение или место 110 устройства или на него.
Как показано на фиг.9, лоток 105 подан от источника 104 в начальное положение под этим источником 104 и покоится на опоре 112, при этом остальные лотки в источнике 104 удерживаются в хранилище или магазине способом, который хорошо известен в этой области, например посредством размыкающего механизма (не показан), который служит для подачи по одному лотку за один раз.
Когда пустое отделение или место 110 находится рядом с устройством 101, выталкивающие средства 102 активируются для передачи лотка 105 к отделению или месту 110, как показано на фиг.10. Последующий лоток 106 в источнике 104 освобождается, например, вышеуказанным механизмом размыкания, что может произойти, как только выталкивающие средства сдвинуты настолько налево, что следующий освобожденный лоток 106 не может упасть вниз перед выталкивающими средствами, но он 106 может вместо этого быть освобожден после того, как выталкивающие средства 102 начали возвращение в положение ожидания. Однако последующий лоток 106 освобождается в то время, когда он может упасть, чтобы оказаться перед выталкивающими средствами 102, перед тем, как последние будут приведены в действие для передачи лотка 106 к новому свободному месту или отделению 110.
На фиг.11 показан распределитель лотков, где выталкивающее средство 102 отодвинуто назад в положение ожидания и последующий лоток 106 подан в начальное положение, готовый к тому, чтобы его переместили в рабочее положение, например, расположенное в отделении 110.
Как показано на фиг.10, последующий освобожденный лоток 106 может упасть на верхнюю часть выталкивающего средства 102 (или его части), когда это средство скользит под лотком 106. Как объяснено выше, когда выталкивающее средство сдвинуто достаточно вправо, как показано на фиг.11, лоток 106 падает вниз, и его можно передавать дальше.
Понятно, что устройство распределения и позиционирования согласно этому аспекту изобретения имеет преимущество, состоящее в том, что лотки могут быть переданы в рабочее положение быстро и эффективно, так как может быть обеспечена постоянная готовность к передаче лотка, как только выталкивающие средства вернутся в положение ожидания. Кроме того, выталкивающие средства обеспечивают, что лоток может быть расположен точно в намеченном месте или отделении.
Как упоминалось, такое устройство для распределения и позиционирования лотков может использоваться в связи с различными вариантами системы и/или способа создания порций, описанными здесь.
В связи с фиг.2 и 3 описано, что готовая порция на/в лотке 14 может быть удалена с носителя 16 посредством устройства 32 передачи, которое показано как имеющее рычаг, который выталкивает готовую порцию с носителя 16, например, толкая концевую часть приспособления 14, обращенную к центру носителя 16. Вместо этого, как показано на фиг.12, такое устройство передачи может содержать рычаг 114, который предназначен для взаимодействия с внутренней частью обода или края лотка 105. Таким образом, как схематически показано на чертеже, рычаг 114 может быть выполнен с частью, например концевой частью, которая может быть выполнена с возможностью зацепления внутренней части лотка 105. Как показано стрелками на фиг.12, когда лоток 105 с готовой порцией находится в положении передачи, рычаг 114 может двигаться к лотку 105, опускаться и оттягиваться назад, благодаря чему лоток 105 будет передан из положения или отделения 110 на носителе, например, к выдачному конвейеру 116. Понятно, что такой рычаг 114 может быть сконструирован разными способами и что он может управляться различными способами, например совершать поступательное движение и/или вращательное движение и т.д. Понятно далее, что место или отделение 110, показанное на фиг.9-12, может находиться на носителе 16, как показано на фиг.1-6, и что места или отделения 110 могут образовывать часть этих носителей 16 или могут быть предназначены для размещения на них.
На фиг.13 показана на виде сверху система создания порций, содержащая устройство подачи или распределения согласно еще одному варианту изобретения. Здесь показано средство перемещения типа робота, например робот 20, соответствующее средствам 20, 22 и 24 перемещения, описанным выше, и, следовательно, дальнейшие подробности конструкции этого робота не будут описаны ниже. Робот 20 выполнен с возможностью селективного подбора или захвата объектов со средства транспортировки объектов, например конвейера 10, и, кроме того, показана оптическая система, сканирующее устройство или подобное устройство 90, предназначенные для определения, например, положения, ориентации, объема, цвета и т.д. объектов, транспортируемых к области сбора в соответствии с тем, что описано выше.
Кроме того, показан носитель 16, который, как показано на чертеже, предназначен для перемещения приспособлений для создания порции, например лотков разных размеров, например лотков 124 с большим размером, расположенных в приспособлении 150b для размещения и защиты, и лотков 122 с меньшим размером, расположенных в приспособлении 150а для размещения и защиты. Понятно, что размеров может быть больше двух. Согласно этому варианту эти лотки 122, 124 доставляются к носителям 16 посредством подающего лотки конвейера 152, ведущего к носителям 16. В начале этого конвейера 152 расположены два распределителя 160 и 162 лотков, каждый из которых имеет источник лотков, например меньших лотков 122 в распределителе 160 и больших лотков 124 в распределителе 162. Лотки распределяются к конвейеру 152 в порядке, в котором они должны быть переданы к носителям 16, например в порядке, заданном центральным средством управления (не показано), и с учетом того, например, которые из порций завершены или будут завершены на носителях 16. На конвейере 152 могут быть размещены средства, например защелки или т.п., для поддерживания лотков взаимно разнесенными и/или для блокирования продвижения лотков, например, когда конвейер 152 движется. Кроме того, могут использоваться датчики, чтобы определить, когда пространство на конвейере становится пустым, благодаря чему следующий лоток может быть передвинут вперед на один шаг, например, путем освобождения защелки, удерживающей его заднюю сторону.
Далее, на фиг.13 показано средство транспортировки порций, или выдачной конвейер 12 для готовых порций 26, которые могут быть переданы на конвейер 12 посредством, например, устройства, показанного на фиг.12, или устройства, описанного со ссылкой на фиг.2 и 3. Понятно, что при конструкции, показанной на фиг.13, носитель 16 будет предпочтительно выполнен с возможность перемещения по часовой стрелке, благодаря чему готовая порция 26 будет передаваться с носителя, оставляя пустое место для лотка 122 или 124, и благодаря чему носитель 16 немедленно после этого будет повернут достаточно, для того чтобы это пустое место было расположено на одной линии с конвейером 152, в результате чего в это пустое место может быть передан лоток, готовый принять участие в процессе создания порций. Таким образом, можно видеть, что достигается эффективное использование оборудования.
На фиг.14 показана на виде сверху, подобно фиг.13, система создания порций, содержащая устройство подачи или распределения согласно еще одному варианту изобретения. Поэтому уже упоминавшиеся детали не будут обсуждаться снова. Как показано на чертеже, носители здесь также выполнены с возможностью размещения лотков разных размеров, например двух разных размеров.
Понятно, что каждое устройство, показанное на фиг.13 и 14, может содержать только одного робота 20 или могут использоваться несколько роботов, например два, три или более, для создания порций объектов, поступающих от средства их транспортирования, например конвейера 10.
Показано средство транспортирования порций, например конвейер 12, который может быть выполнен, как описано выше в связи с фиг.13, и, кроме того, используются два устройства 166 и 168 для распределения и позиционирования лотков, каждое из которых, например, подает лотки определенного размера, или они могут оба подавать лотки одинакового размера. На каждом роботе могут использоваться более чем два устройства 166 и 168. Эти устройства 166 и 168 могут быть выполнены, как объяснено в связи с фиг.9-11, и, как показано на чертеже, они могут быть расположены рядом друг с другом и таким образом, что лотки доставляются прямо к отдельным пустым местам на носителе 16, передаются и позиционируются посредством выталкивающих средств 154 и 156 соответственно.
В связи с вышеуказанными различными устройствами для передачи на носители пустых приспособлений для создания порции, например лотков, заметим, что для определения, является ли некоторое место или отделение на/в носителе пустым, могут использоваться средства, например датчики и т.д., благодаря чему можно определить, если случайно лоток не был передан или не был правильно передан носителю. В таком случае системе может быть дана команда не помещать никакого объекта на конкретное место, или предпочтительно лоток может быть передан в конкретное место. Это, например, может иметь место, когда используются два или более устройства подачи или устройства 166 и 168 распределения и позиционирования, как показано на фиг.14, где, если лоток не был успешно передан с использованием устройства 166, лоток может быть передан с использованием другого устройства 168 (допуская, что носители 16 вращаются против часовой стрелки на фиг.14, и наоборот, если вращение происходит по часовой стрелке).
Вышеуказанный блок управления, который, как указанно, соединен с оптической или сканирующей системой, содержит точную информацию, касающуюся позиции, местоположения, ориентации и, возможно, типа объектов, благодаря чему можно управлять роботами, чтобы перемещать объекты, например поднимать объекты и помещать их на приспособления для создания порции, включая изменение ориентации объектов, если необходимо. Кроме того, блок управления присоединен к взвешивающим средствам или средствам определения массы другими способами, благодаря чему он также содержит информацию о весе, по отношению к каждому из объектов.
Этот блок управления может быть снабжен программным обеспечением, облегчающим выбор объектов, которое осуществляет оптимальный выбор с учетом выбранной операции упаковки. Такое программное обеспечение может, например, быть программным обеспечением, работающим в соответствии с рабочими правилами, описанными в Европейском патентном документе ЕР 781172 или в международной публикации WO 01/22043. Таким образом, создание порций может выполняться в соответствии с так называемым принципом накопления, т.е. путем отбора и помещения объектов в соответствии с их весом и весом объектов, уже помещенных или отобранных (для размещения), или в соответствии с так называемым комбинационным принципом, т.е. путем отбора объекта для порции как комбинации предметов, доступных для отбора, например, объектов, присутствующих на средстве 10. Также могут использоваться другие принципы или комбинации.
Кроме того, упоминается, что вес или масса объектов могут быть определены другими способами, нежели взвешивание, как было также указано выше. Например, определение веса может быть выполнено с использованием оптического оборудования, возможно одновременно со сканированием объектов, которое происходит, чтобы определить положение, ориентацию и, возможно, также тип объектов. Могут также использоваться другие средства и способы для определения массы объектов, которые будут содержаться в пунктах формулы изобретения.
Что касается средств перемещения типа робота, например роботов, как они просто называются выше, специалисту будет понятно, что в связи с настоящим изобретением могут использоваться роботы различных типов. По существу, средства перемещения типа робота могут содержать средства селективного захвата, подбора, поднятия или вообще обработки объектов, осуществляемых под управлением управляющего средства, и, кроме того, они могут быть выполнены с возможностью управляемого перемещения объектов в требуемое положение, также под управлением управляющего средства, например, путем передвижения объекта в нужное положение и опускания/освобождения объекта, возможно после его ориентирования, или, например, посредством бросания объекта в требуемое положение. Специалисту также будет понятно, что в пределах формулы изобретения могут быть использованы роботы различных типов.
Кроме того, заметим, что носитель или носители для приспособлений для создания порции могут перемещаться непрерывно или прерывисто, например шагами. Кроме того, понятно, что скорость, с которой они движутся, может быть постоянной или может меняться под управлением, например, центрального управляющего средства. Более того, также понятно, что направление вращения может всегда быть одно и то же или что оно может изменяться.
Список обозначений
1 Объекты
2,4 Подающие конвейеры
6, 8 Взвешивающие устройства
10 Средство транспортирования объектов, конвейер
12 Средство транспортировки порций
14 Приспособления для создания порции, лотки или подобные им
16 Носители
16а, 16b Сегменты носителей
18 Средства расположения отдельных приспособлений, например
лотков, на носителях
20, 22, 24 Средства перемещения типа роботов
26 Готовые порции
30 Устройство передачи порций и приспособлений для создания порции
32 Устройство передачи порций
34 Устройство передачи пустых приспособлений для создания порции
36 Буферная зона для приспособлений для создания порции
38 Источник приспособлений для создания порции, например лотков
40 Рама
42 Спуск или наклоняемая опора для готовых порций
50 Приспособление для размещения и защиты приспособлений 14
52 Пластинчатая часть приспособления 50 размещения и защиты
54, 58 Боковые части
56 Концевая часть
60 Средства поддержки и крепления
62, 64, 66 Бортики
68 Отверстие в пластинчатой части 52
70 Концевое стопорное средство
72 Несущий шарнир
74 Удерживающий рычаг
78 Размыкающий механизм
80 Упругое средство
90 Оптическая система, сканирующее средство или т.п.
92 Центральный блок управления
94а-n Управляющие сигналы на входе
96а-m Управляющие сигналы на выходе
101 Устройство распределения и позиционирования лотков
102 Выталкивающее средство
103 Хранилище или магазин
104 Источник лотков
105, 106 Лотки или приспособления для создания порции в целом
110 Отделение или место для лотка
112 Горизонтальная опора
114 Рычаг передающего устройства
116 Выдачной конвейер
122 Меньший лоток
124 Больший лоток
150а, 150b Приспособления для размещения и защиты для лотков
152 Конвейер, подающий лотки
154, 156 Выталкивающие средства
160, 162 Распределители лотков
166, 168 Устройства распределения и позиционирования лотков
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ГРУППИРОВАНИЯ ПРЕДМЕТОВ | 2005 |
|
RU2379637C2 |
| АВТОМАТИЧЕСКИЙ ПОСЕВ И ОЦЕНКА СЕМЯН | 2019 |
|
RU2810001C2 |
| СИСТЕМА И СПОСОБ ЗАДАНИЯ ПОСЛЕДОВАТЕЛЬНОСТИ ДЛЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ПУНКТА ПОДГОТОВКИ | 2016 |
|
RU2689597C2 |
| ЛИНИЯ ПОДАЧИ, ОРИЕНТАЦИИ И УКУПОРКИ КРЫШЕК С ДОЗАТОРОМ НА БУТЫЛОЧНУЮ ТАРУ | 2021 |
|
RU2767818C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПРИГОТОВЛЕНИЯ СВЕЖИХ ГОРЯЧИХ НАПИТКОВ И ИХ ДОЗИРОВАНИЯ | 2008 |
|
RU2466673C2 |
| УСТРОЙСТВО ДЛЯ ГАЗОВОЙ ТЕРМООБРАБОТКИ | 2008 |
|
RU2468315C2 |
| Способ и система для обработки порций пищевых продуктов | 2019 |
|
RU2795465C2 |
| Автоматическая линия изготовления изделий из металлических порошков | 1988 |
|
SU1505666A2 |
| СПОСОБ И АППАРАТ ДЛЯ ПОЛУЧЕНИЯ СВЕРНУТОГО КОЛЛАГЕНОВОГО НОСИТЕЛЯ | 2013 |
|
RU2670746C9 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УСЛУГИ "НАЖМИ И ГОВОРИ" | 2006 |
|
RU2420921C2 |
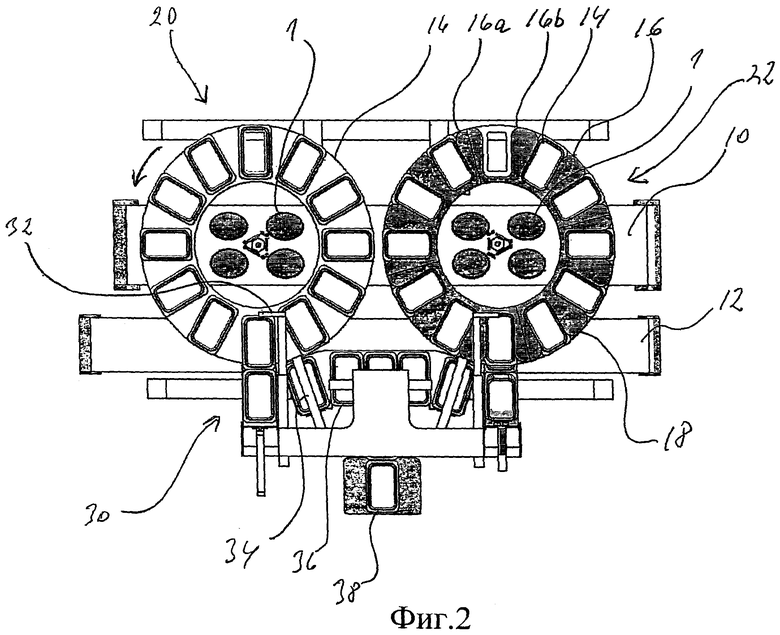
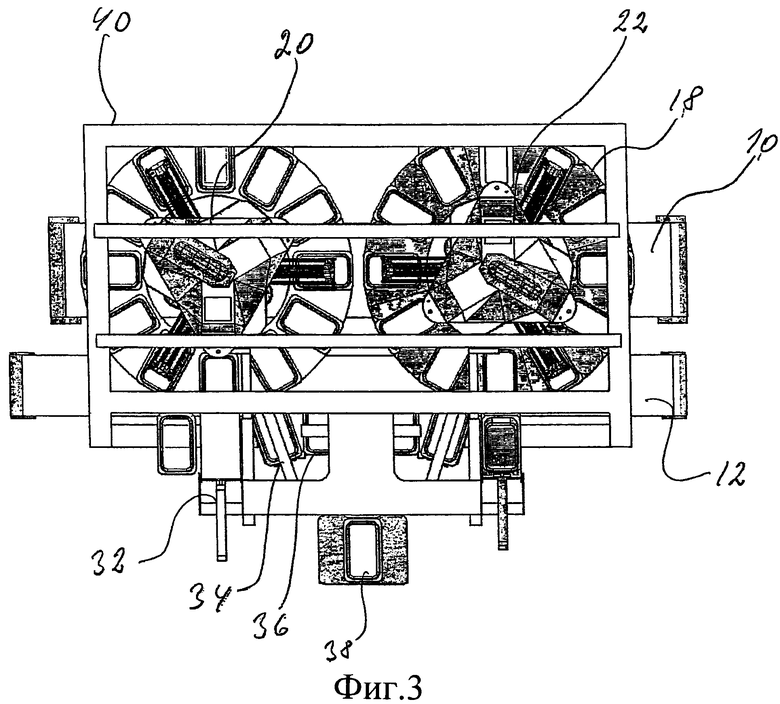
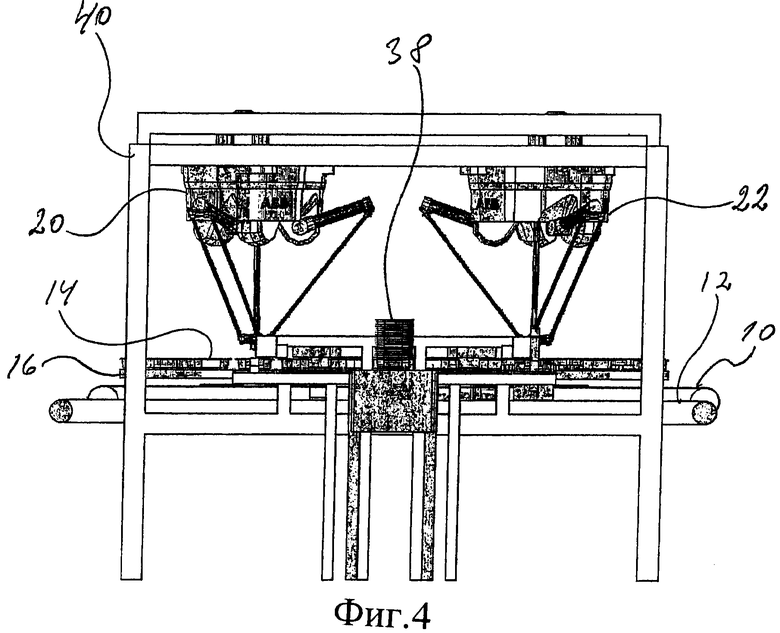
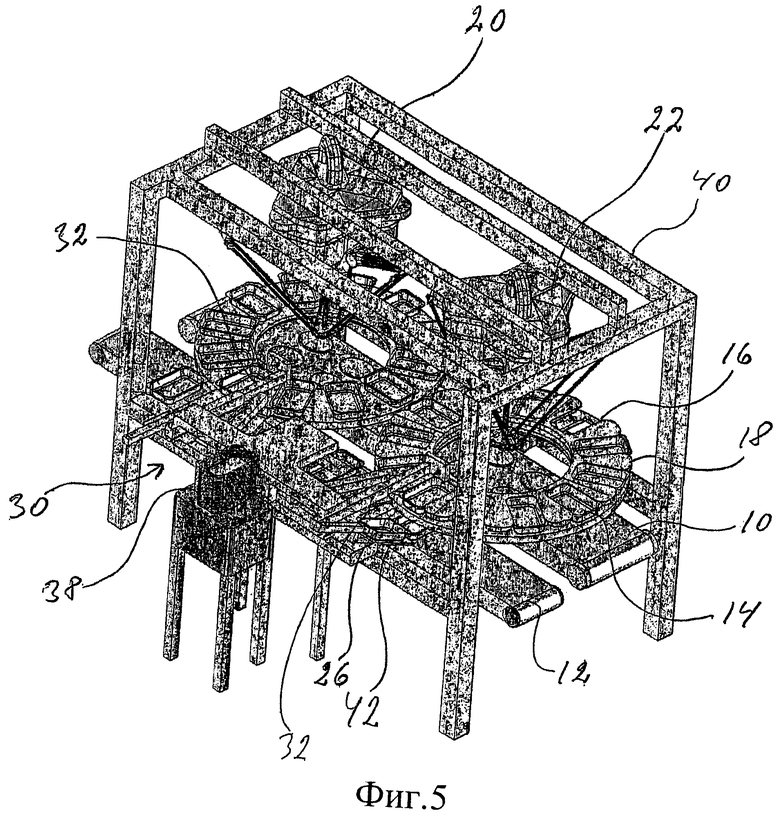
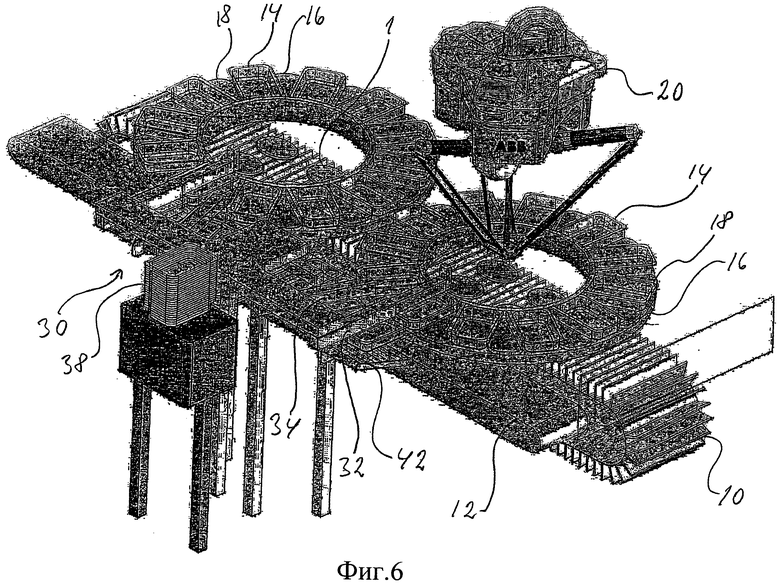
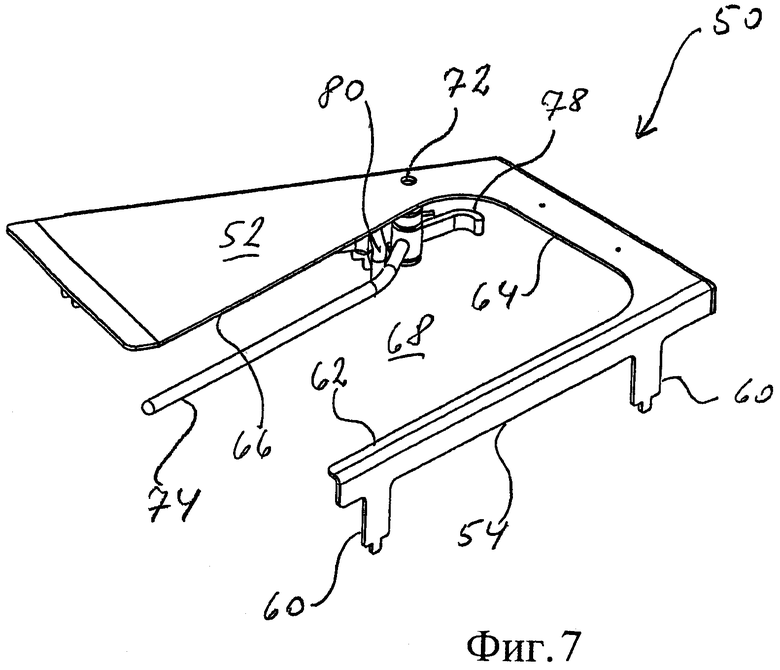
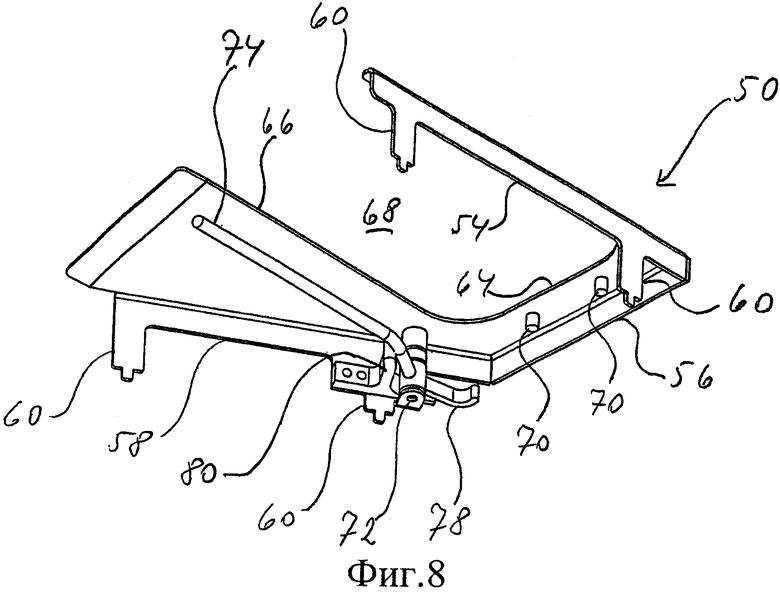
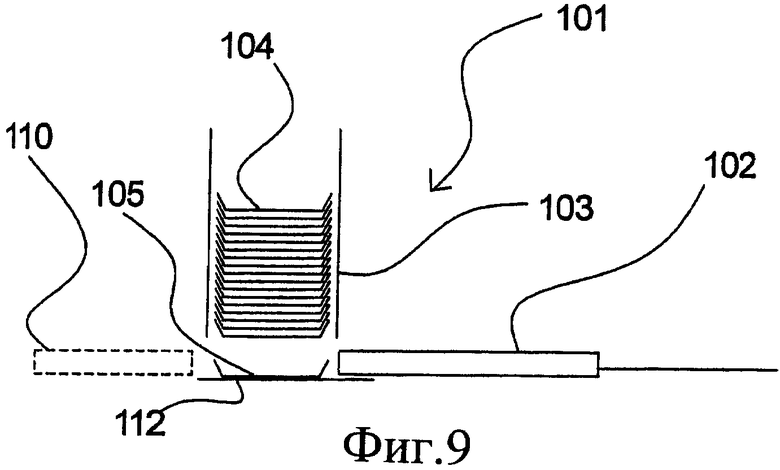
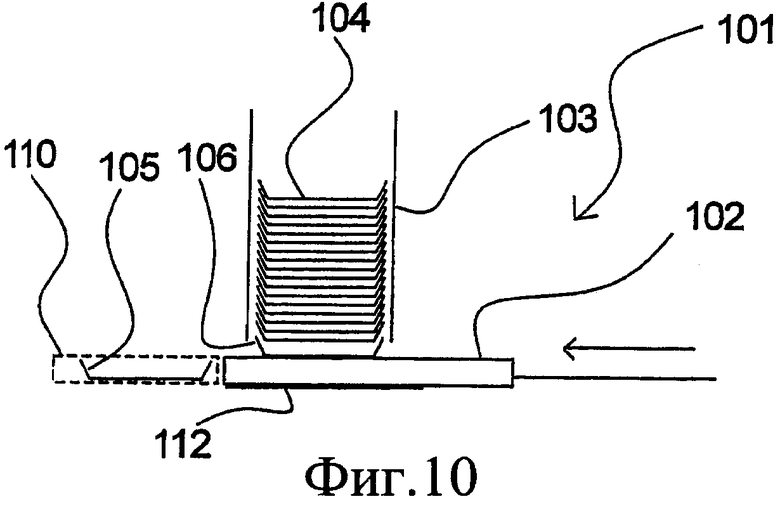
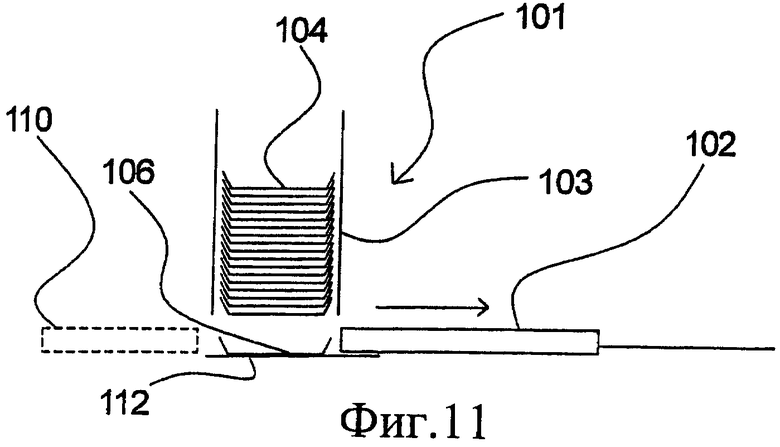
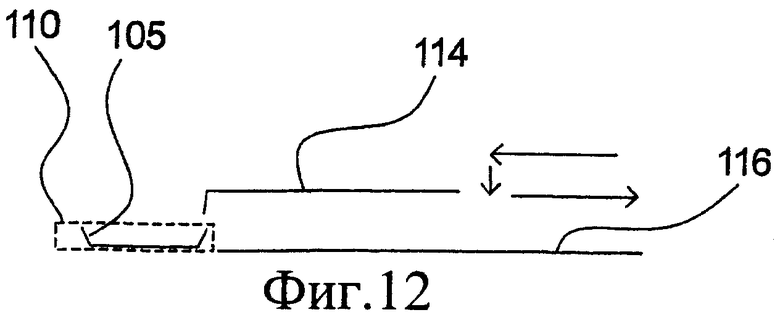
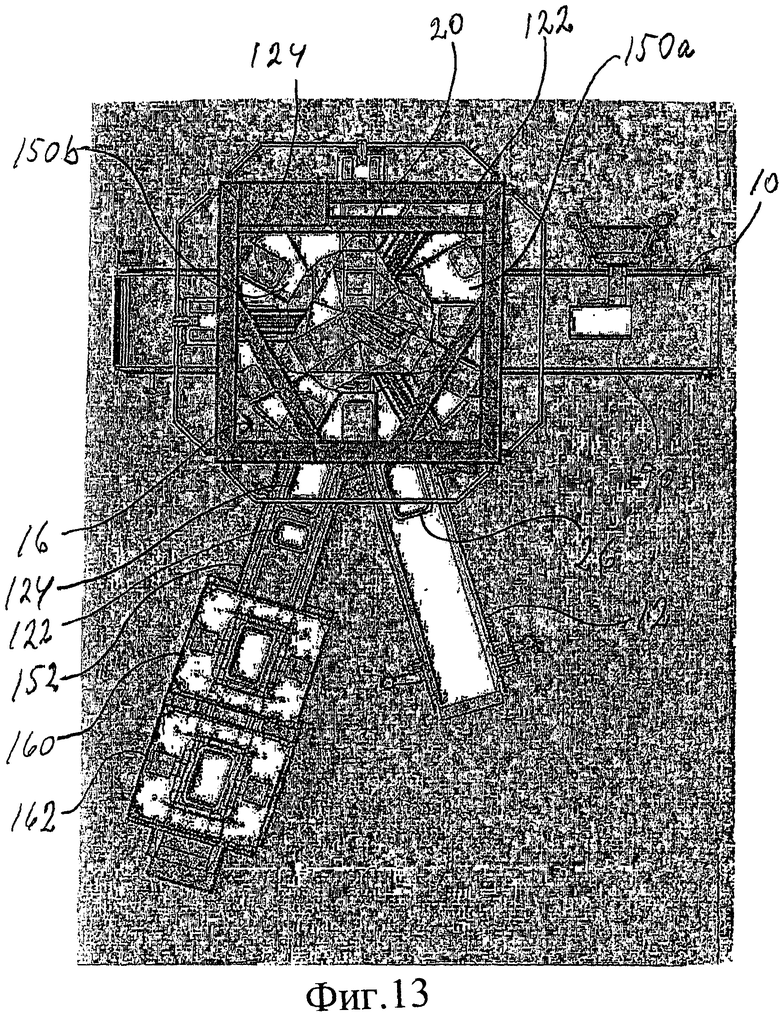
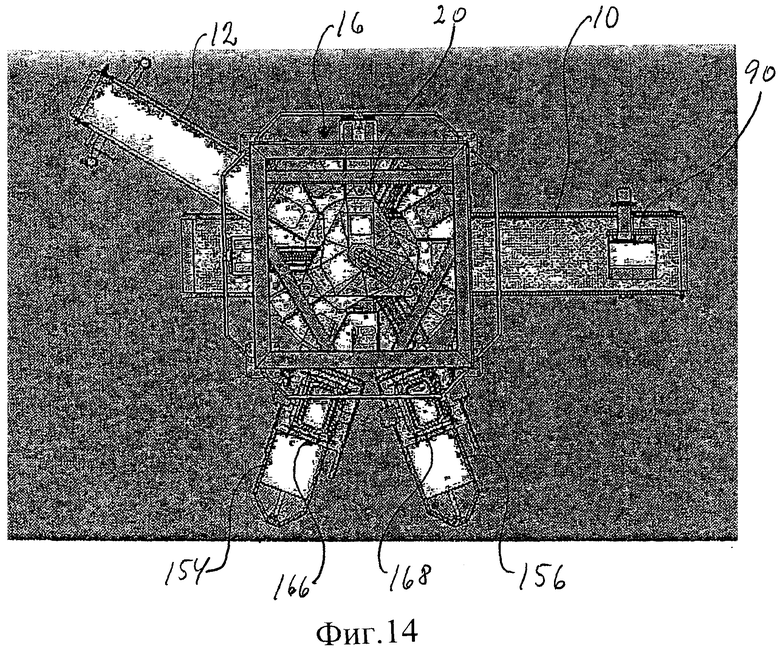
Изобретение относится к средствам для создания порций объектов и направлено на повышение эффективности обработки создаваемых порций таким образом, чтобы порция удовлетворяла заданным критериям в отношении, например, пределов общего веса, возможно количества объектов, веса, ориентации и/или типа (типов) объектов. Этот технический результат обеспечивается за счет того, что определяют вес каждого отдельного объекта, транспортируют объекты с помощью средства транспортирования объектов, выполняют выборочную передачу объектов от указанного средства (10) транспортирования объектов к приспособлениям для создания порции посредством по меньшей мере одних средств перемещения типа робота, которые выполнены с возможностью выборочного захвата или подбора объекта и его помещения в выбранное положение, благодаря чему создают порцию объектов с учетом указанных заданных критериев, причем указанные порции объектов создают на приспособлениях для создания порций, которые перемещают вокруг указанных по меньшей мере одних средств перемещения типа робота. 2 н. и 48 з.п. ф-лы, 14 ил.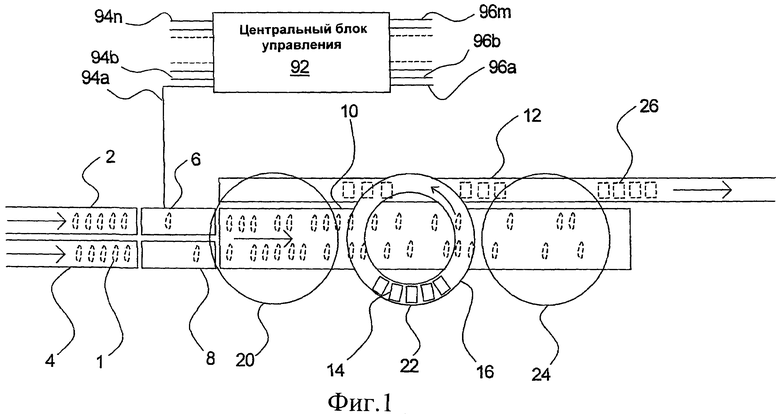
1. Способ создания порций подаваемых объектов (1) таким образом, что порция удовлетворяет заданным критериям, например, в отношении пределов общего веса и, возможно, количества объектов, веса, ориентации и/или типа (типов) объектов, в котором определяют вес каждого отдельного объекта, транспортируют объекты с помощью средства (10) транспортирования объектов, выполняют выборочную передачу объектов от указанного средства (10) транспортирования объектов к приспособлениям для создания порции посредством по меньшей мере одних средств (20, 22, 24) перемещения типа робота, которые являются средствами перемещения, выполненными с возможностью выборочного захвата или подбора объекта и его помещения в выбранное положение, благодаря чему создают порцию объектов с учетом указанных заданных критериев, причем указанные порции объектов создают на приспособлениях (14) для создания порций, которые перемещают вокруг указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота.
2. Способ по п.1, в котором указанные приспособления (14) для создания порций располагают таким образом, что несколько приспособлений (14) перемещается вокруг каждых из указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота.
3. Способ по п.1, в котором указанные приспособления (14) являются лотками или подобными средствами.
4. Способ по п.1, в котором указанные приспособления (14) располагают на носителе (16), например носителе, предназначенном для каждых из указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота, при этом носитель (носители) (16) выполнен (выполнены) с возможностью перемещения указанных приспособлений (14).
5. Способ по п.4, в котором указанный носитель (16) выполнен с возможностью поворота указанных приспособлений (14) по замкнутой траектории, например кругу, при создании порций.
6. Способ по п.1, в котором приспособление (14) для создания порции могут перемещать вокруг указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота с совершением более одного оборота при создании на указанном приспособлении (14) порции из объектов.
7. Способ по п.4, в котором указанный носитель (16) содержит ряд сегментов (16а, 16b), которые можно заменять, например, при необходимости использовать приспособления для создания порции, имеющие различные размеры и/или типы.
8. Способ по п.4, в котором указанный носитель (16) выполнен с возможностью удерживания указанных приспособлений (14), например лотков, при его перемещении.
9. Способ по п.8, в котором указанный носитель (16) содержит удерживающие средства (74), выполненные с возможностью расцепления, например посредством расцепляющего механизма (78), при размещении лотка на носителе или при удалении готовой порции.
10. Способ по п.4, в котором указанный носитель (16) выполнен с возможностью закрытия краев указанных приспособлений (14), например лотков, при создании указанных порций из объектов.
11. Способ по п.1, в котором приспособление (14) для создания порции после завершения создания порции передают средству (12) дальнейшей транспортировки, обработки, упаковки и т.д.
12. Способ по п.11, в котором готовую порцию передают с, например, носителя, возможно через промежуточное положение, вниз через, например, спуск к указанному средству (12) дальнейшей транспортировки, обработки, упаковки и т.д.
13. Способ по п.11, в котором пустое приспособление (14) для создания порции передают, например, к указанному носителю (16) после удаления готовой порции.
14. Способ по п.11, в котором пустые приспособления (14) для создания порций подают от источника (38, 104) этих приспособлений, возможно через буферную зону (36).
15. Способ по п.1, в котором объекты (1) подают одним или несколькими рядами на указанном средстве (10) транспортирования объектов к указанным по меньшей мере одним средствам (20, 22, 24) перемещения типа робота.
16. Способ по п.1, в котором область сбора объектов для каждых из указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота задают роботом (20, 22, 24) и/или движущимся приспособлением (14) для создания порции.
17. Способ по п.1, в котором указанное создание порций выполняют под управлением, например, центральной системы (92) управления.
18. Способ по п.1, в котором используют несколько роботов, например два, три или более, причем у каждого из роботов соответственно могут быть собраны порции разных размеров и/или типов.
19. Способ по п.1, в котором указанные приспособления (14) непрерывно перемещают вокруг указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота во время процесса создания порций.
20. Способ по п.1, в котором указанные приспособления (14) перемещают не непрерывно, например, шаг за шагом вокруг указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота во время процесса создания порций.
21. Способ по одному из пп.1-20, в котором приспособления для создания порции, например лотки или подобные элементы, подают следующим образом: подают приспособление (105, 106) для создания порции в начальное положение от источника (104) этих приспособлений, передают указанное приспособление (105, 106) из начального положения в рабочее положение с использованием выталкивающего средства (102), возвращают указанное выталкивающее средство (102) в положение ожидания, благодаря чему следующее освобожденное приспособление (105, 106) для создания порции приходит в указанное начальное положение.
22. Способ по п.21, в котором указанное следующее освобожденное приспособление (105, 106) освобождают из указанного источника (104) либо при указанной передаче приспособления (105, 106) из начального положения в рабочее положение, либо при возвращении выталкивающего средства (102) в положение ожидания.
23. Способ по п.21, в котором указанное следующее освобожденное приспособление (105, 106) поддерживают по меньшей мере частью указанного выталкивающего средства (102) во время по меньшей мере части указанного этапа передачи.
24. Способ по п.21, в котором указанные выталкивающие средства (102) работают с совершением возвратно-поступательного перемещения.
25. Система создания порций подаваемых объектов (1) таким образом, что порция удовлетворяет заданным критериям, например, в отношении пределов общего веса и, возможно, количества объектов, веса, ориентации и/или типа (типов) объектов, содержащая средство определения отдельного веса каждого объекта, средство (10) транспортирования объектов, приспособления (14) для создания порции, по меньшей мере одни средства (20, 22, 24) перемещения типа робота, предназначенные для осуществления выборочной передачи объектов от указанного средства (10) транспортирования к указанным приспособлениям (14), причем указанные средства (20, 22, 24) перемещения типа робота являются средствами перемещения, выполненными с возможностью выборочного захвата или подбора объекта и его помещения в выбранное положение, благодаря чему создается порция объектов с учетом указанных заданных критериев, причем указанные порции из объектов создаются на указанных приспособлениях (14), которые перемещаются вокруг указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота.
26. Система по п.25, в которой указанные приспособления (14) расположены с обеспечением возможности перемещения нескольких приспособлений (14) вокруг каждых из указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота.
27. Система по п.25, в которой указанные приспособления (14) являются лотками или подобными средствами.
28. Система по п.25, в которой указанные приспособления (14) для создания порции расположены на носителе (16), например носителе, предназначенном для каждых из указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота, причем носитель (носители) (16) предназначен (предназначены) для перемещения указанных приспособлений (14).
29. Система по п.28, в которой указанный носитель (16) выполнен с возможностью поворота указанного приспособления (14) по замкнутой траектории, например по кругу, при создании порций.
30. Система по п.25, которая выполнена с возможностью перемещения приспособления (14) для создания порции вокруг указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота с совершением более одного оборота при создании на указанном приспособлении (14) порции из объектов.
31. Система по п.28, в которой указанный носитель (16) содержит несколько сегментов (16а, 16b), которые могут заменяться, например, при необходимости использовать указанные приспособления различных размеров и/или типа.
32. Система по п.28, в которой указанный носитель (16) содержит средство удержания указанных приспособлений (14), например лотков, например в виде удерживающего рычага (74), на который может воздействовать упругое средство (80).
33. Система по п.32, в которой средство удержания указанных приспособлений (14), например лотков, например в виде удерживающего рычага (74) содержит расцепляющий механизм (78).
34. Система по п.28, в которой указанный носитель (16) содержит средство закрытия краев указанных приспособлений (14), например лотков, например в виде бортиков (62, 64, 66) пластинчатой части (52).
35. Система по п.25, которая выполнена с возможностью передачи приспособления (14) для создания порции после завершения создания порции к средству (12) дальнейшей транспортировки, обработки, упаковки и т.д.
36. Система по п.35, в которой готовая порция передается, например, от носителя, возможно через промежуточное положение, вниз через, например, спуск к указанному средству (12) дальнейшей транспортировки, обработки, упаковки и т.д.
37. Система по п.35, которая выполнена с возможностью передачи пустого приспособления (14) для создания порции к носителю (16) после удаления готовой порции.
38. Система по п.35, которая содержит источник (38, 104) приспособлений для создания порции, при этом пустые приспособления (14) распределяются из указанного источника, возможно через буферную зону (36), к носителю.
39. Система по п.25, в которой объекты (1) подаются одним или несколькими рядами на указанном средстве (10) транспортирования объектов к указанным по меньшей мере одним средствам (20, 22, 24) перемещения типа робота.
40. Система по п.25, в которой область подбора объектов для каждых из указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота определяется роботом (20, 22, 24) и/или движущимися приспособлениями (14) для создания порции.
41. Система по п.25, которая содержит средство управления, например центральную систему (92) управления, для управления указанным созданием порций.
42. Система по п.25, которая содержит несколько, например два, три или более роботов, при этом у каждого из указанных роботов могут быть созданы соответственно порции разных размеров и/или типов.
43. Система по п.25, в которой указанные приспособления (14) непрерывно перемещаются вокруг указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота во время процесса создания порций.
44. Система по п.25, в которой указанные приспособления (14) перемещаются не непрерывно, например шаг за шагом, вокруг указанных по меньшей мере одних средств (20, 22, 24) перемещения типа робота во время процесса создания порций.
45. Система по одному из пп.25-44, которая содержит устройство для распределения приспособлений для создания порции, например лотков и т.д., содержащее источник (104) указанных приспособлений и выталкивающие средства (102), которые выполнены с возможностью передачи указанных приспособлений (105, 106) из начального положения в рабочее положение, причем указанное устройство выполнено с возможностью подачи приспособлений (105, 106) для создания порции в указанное начальное положение из указанного источника (104).
46. Система по п.45, в которой указанное начальное положение расположено ниже указанного источника (104) приспособлений.
47. Система по п.45, в которой указанные выталкивающие средства (102) выполнены с возможностью совершения при работе возвратно-поступательного движения.
48. Система по п.45, в которой по меньшей мере часть указанных выталкивающих средств (102) выполнена с возможностью прохождения под указанным источником (104) во время передачи приспособления (105, 106) для создания порции из начального положения в рабочее положение.
49. Система по п.45, в которой указанное устройство выполнено с возможностью освобождения приспособления (105, 106) для создания порции из указанного источника либо при передаче указанного приспособления (105, 106) из начального положения в рабочее положение, либо после завершения указанной передачи.
50. Система по п.49, в которой указанное устройство содержит расцепляющий механизм для индивидуального освобождения указанного приспособления (105, 106) из указанного источника (104).
| US 5178225 A, 12.01.1993 | |||
| WO 2005106405 A1, 10.11.2005 | |||
| US 2005189274 A1, 01.09.2005 | |||
| JP 62081534 A, 15.04.1987 | |||
| Способ весового дискретного дозирования замороженных штучных материалов | 1985 |
|
SU1290083A1 |

