Изобретение относится к порошковой металлургии, в частности к автомати- ческим линиям изготовления изделий из металлических -порошков, и является усовершенствованием изобретения по авт.св. № 1315138.
Цель изобретения - повышение производительности и увеличение выхода годной продукции.
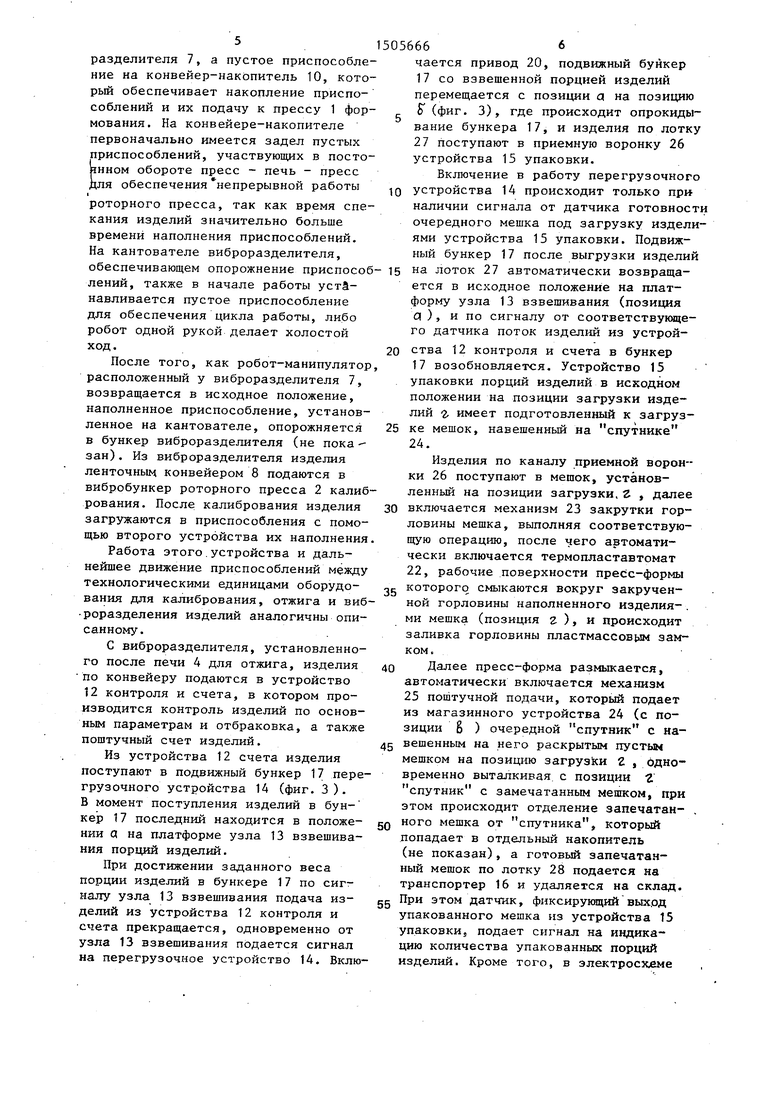
На фиг. 1 показана автоматическая линия, общий вид; на фиг. 2 - то же вид сверху,- на фиг. 3 - устройство взвешивания, перегрузочное и упаковки, общий вид; на фиг. 4 - то же, вид сверху.
Автоматическая линия изготовления изделий из металлических порошков состоит из роторного пресса 1 (фиг.1) колодного формования изделий и роторного прессд 2 для калибрования, нагревательных устройств в виде конвейерной электропечи 3 сопротивления
для спекания и электропечи 4 с опро- тивления для отжига изделий, комплекта приспособлений 5 для размещения изделий, устройств 6 наполнения изделиями приспособлений 5, расположенных у прессов формования и калибрования, виброразделителей 7 (фиг. 2) с ленточными транспортерами 8, расположенными перед прессом 2 калибрования и на выходе электропечи 4 для отжига, транспортеров 9 для передачи заполненных изделиями приспособлений 5 между единицами технологического оборудования, конвейеров-накопителей
10для накопления и передачи пустых приспособлений, роботов-манипуляторов
11для связи единиц оборудования с . транспортной системой и обеспечения
работы линии в едином замкнутом цикле, устройства 12 контроля и счета изделий, узла 13 взвешивания порций изделий, перегрузочного устройсл
О)
1Ч
ций изделий и транспортера 16 для удаления упакованных порций изделий, например, на склад.
Перегрузочное устройство 14 (фиг. 3) содержит подвижный бункер 17, установленный в захватном устройстве 18, которое имеет возможность перемеказан) устройства 6 наполнения изделиями приспособлений 5.
Изделия поштучно скатываются по соответствующему лотку в приспособление 5, установленное на приемном устройстве 6. При этом обеспечивается равномерное заполнение приспо


| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия изготовления изделий из металлических порошков | 1985 |
|
SU1315138A2 |
| Автоматическая линия изготовления изделий из металлических порошков | 1985 |
|
SU1247164A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ УТИЛИЗАЦИИ СНАРЯДОВ | 2010 |
|
RU2449238C1 |
| Способ загрузки токарных полуавтоматов деталями для их двусторонней обработки и автоматическая линия для его осуществления | 1988 |
|
SU1662807A1 |
| СИСТЕМА И СПОСОБ СБОРКИ И СОБИРАНИЯ НЕЗАПОЛНЕННЫХ ПАКЕТОВ С ВЫЛИВНЫМИ НОСИКАМИ | 2013 |
|
RU2628915C2 |
| УПАКОВОЧНАЯ МАШИНА И СПОСОБ УПАКОВЫВАНИЯ ИЗДЕЛИЙ | 2009 |
|
RU2503596C2 |
| СПОСОБ ТОЧНОГО ВЕСОВОГО ДОЗИРОВАНИЯ ЗАДАННОГО СЫПУЧЕГО МАТЕРИАЛА И АВТОМАТИЧЕСКОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1992 |
|
RU2089861C1 |
| Сборочный центр | 1985 |
|
SU1311908A1 |
| Гибкий технологический модуль | 1986 |
|
SU1586825A1 |

Изобретение относится к порошковой металлургии , в частности, к автоматическим линиям изготовления изделий из металлических порошков. Цель - повышение производительности и увеличение выхода годной продукции. Линия снабжена устройством упаковки порции изделий и перегрузочным устройством, установленным между узлом взвешивания порции изделий и устройством упаковки, при этом перегрузочное устройство и устройство упаковки электрически связаны между собой и с узлом взвешивания. 4 ил.
щения вдоль направляющих 19 из поло- |0 собления отпрессованными изделиями.
После загрузки приспособления 5 определенным количеством изделий лоток перекрывается отсекателем (не показан) . Отпрессованные изделия сбрасываются в течение этого времени на соответствующие ручьи лотк.а устройства 6 и скапливаются у отсекателя / до тех пор, пока происходит замена приспособлений. Работа роторного пресса при этом не прекращается.
Робот-манипулятор 11, расположенный у роторного пресса 1 холодного формования, захватом одной руки забирает наполненное приспособление 5
жения а в положение ff и обратно с помощью привода 20. На позициях q и & установлены датчики (не показаны) наличия подвижного бункера 17. Кроме того, на позиции С| захватное 15 устройство 18 обеспечивает свободное положение бункера 17 на платформе (не показано) устройства 13 для взвешивания, что исключает погрешности при взвешивании порции изделий, на- 20 ходящихся в бункере 17.
Устройство 15 упаковки порции изделий (фиг. 3 и 4) содержит сварную станину 21, на которой установлены
термопластавтомат 22, обеспечивающий 25 от пресса 1, а захватом второй ру- литье пластмассовых замков, механизм ки - пустое приспособление с конвейе- 23 закрутки горловин матерчатых меш- ра-накопителя 10 и переносит напол- ков, магазинное устрййство 24 для ненное приспособление на транспор- накопления специальных приспособле- тер 9, а пустое приспособление - НИИ (спутников), на которые предва-30 на приемное место устройства 6. Пос- рительно навешиваются мешки с раскры- ле этого ротор и отсекатель возвра той горловиной (позиция Ь ), механизм щаются в исходное положение, в ре- 25 поштучной подачи спутников с зультате чего возобновляется поток мешками в рабочую зону термопластавто- изделий из лотка в пустое приспособ- мата 22 (позицию загрузки изделий 2 ) 35 ление. приемную воронку 26, лотки 27 и 28. Транспортер 9 перемещает наполненУстройство 15 упаковки порций изданий снабжено датчиком готовности очередного мешка под загрузку изделиями, фиксирующим выход упакованного 40 мешка с порцией изделий из устройства упаковки, и индикатором количества упакованных порций изделий (не показаны) .
Автоматическая линия работает сле-дз кания. Из печи спеканий приспособле- дующим образом.ния 5 с охлажденными изделиями переГотовая порошковая смесь подается в бункеры роторного пресса 1. Уровень порошка в бункерах поддерживается
ное приспособление 5 к роботу-манипулятору, установленному у электропечи 3 для спекания. Робот-манипулятор захватом руки забирает наполненное приспособление с транспортера 9 и устанавливает его на непрерьшно движущуюся с определенной скоростью конвейерную ленту электропечи 3 для спеносятся роботом-манипулятором, установленным на выходе из печи, на транспортер 9. Транспортер 9 церемещает приспособления с изделиями к следующему роботу-манипулятору, установленному у виброразделителя 7. Робот-манипулятор захватом одной руки забирает приспособление со спеченными Из- сг делиями с транспортера 9, а захватом второй руки - пустое приспособление с кантователя (не показан) виброразделителя 7 и переносит наполненное приспособление на кантователь виброавтоматически. Из бункеров порошок подается на холодное формование, которое осуществляется автоматически в сменных матрицах (не показаны), установленных на многопозиционном рабочем роторе (не показан). Транспортный ротор (не показан) пресса производит поштучный съем отпрессованных изделий с каждой позиции ра- .бочего ротора и сбрасываает их на
После загрузки приспособления 5 определенным количеством изделий лоток перекрывается отсекателем (не показан) . Отпрессованные изделия сбрасываются в течение этого времени на соответствующие ручьи лотк.а устройства 6 и скапливаются у отсекателя / до тех пор, пока происходит замена приспособлений. Работа роторного пресса при этом не прекращается.
Робот-манипулятор 11, расположенный у роторного пресса 1 холодного формования, захватом одной руки забирает наполненное приспособление 5
ное приспособление 5 к роботу-манипулятору, установленному у электропечи 3 для спекания. Робот-манипулятор захватом руки забирает наполненное приспособление с транспортера 9 и устанавливает его на непрерьшно движущуюся с определенной скоростью конвейерную ленту электропечи 3 для спе
носятся роботом-манипулятором, установленным на выходе из печи, на транспортер 9. Транспортер 9 церемещает приспособления с изделиями к следующему роботу-манипулятору, установленному у виброразделителя 7. Робот-манипулятор захватом одной руки забирает приспособление со спеченными Из- делиями с транспортера 9, а захватом второй руки - пустое приспособление с кантователя (не показан) виброразделителя 7 и переносит наполненное приспособление на кантователь виброразделителя 7, а пустое приспособление на конвейер-накопитель 10, который обеспечивает накопление приспособлений и их подачу к прессу 1 формования. На конвейере-накопителе первоначально имеется задел пустых приспособлений, участвующих в постоянном обороте пресс - печь - пресс для обеспечения непрерывной работы
роторного пресса, так как время спекания изделий значительно больше времени наполнения приспособлений. На кантователе виброразделителя, обеспечивающем опорожнение приспособ лений, также в начале работы устй- навливается пустое приспособление для обеспечения цикла работы, либо робот одной рукой делает холостой ход.
После того, как робот-манипулятор расположенный у виброразделителя 7, возвращается в исходное положение, наполненное приспособление, установленное на кантователе, опорожняется в бункер виброразделителя (не пока зан). Из виброразделителя изделия ленточным конвейером 8 подаются в вибробункер роторного пресса 2 калибрования. После калибрования изделия загружаются в приспособления с помощью второго устройства их наполнения
Работа этого.устройства и дальнейшее движение приспособлений между технологическими единицами оборудо- вания для калибрования, отжига и виб роразделения изделий аналогичны описанному.
С виброразделителя, установленного после печи А для отжига, изделия по конвейеру подаются в устройство 12 контроля и счета, в котором производится контроль изделий по основным параметрам и отбраковка, а также поштучный счет изделий.
Из устройства 12 счета изделия поступают в подвижный бункер 17 перегрузочного устройства 14 (фиг. 3). В момент поступления изделий в бун- кер 17 последнрш находится в положе- НИИ а на платформе узла 13 взвешивания порций изделий.
При достижении заданного веса порции изделий в бункере 17 по сиг- натгу узла 13 взвешивания подача из- делий из устройства 12 контроля и счета прекращается, одновременно от узла 13 взвешивания подается сигнал на перегрузочное устройство 14. Включается привод 20, подвижный бункер 17 со взвешенной порцией изделий перемещается с позиции а на позицию S (фиг. 3), где происходит опрокидывание бункера 17, и изделия по лотк 27 поступают в приемную воронку 26 устройства 15 упаковки.
Включение в работу перегрузочног устройства 14 происходит только пр наличии сигнала от датчика готовнос очередного мешка под загрузку изделями устройства 15 упаковки. Подвижный бункер 17 после выгрузки издели на лоток 27 автоматически возвращается в исходное положение на платформу узла 13 взвешивания (позиция Я ), и по сигналу от соответствующего датчика поток изделий из устройства 12 контроля и счета в бункер 17 возобновляется. Устройство 15 упаковки порций изделий в исходном положении на позиции загрузки изделий 1 имеет подготовленный к загрузке мешок, навешенный на спутнике 24.
Изделия по каналу приемной воронки 26 поступают в мешок, установленный на позиции загрузки.2 , далее включается механизм 23 закрутки горловины мешка, выполняя соответствующую операцию, после чего автоматически включается термопластавтомат 22, рабочие поверхности пресс-формы которого смыкаются вокруг закрученной горловины наполненного изделия- ми мешка (позиция 2 ), и происходит заливка горловины пластмассовым замком.
Далее пресс-форма размыкается, автоматически включается механизм 25 поштучной подачи, который подает из магазинного устройства 24 (с позиции 6 ) очередной спутник с навешенным на него раскрытым пустым мешком на позицию загрузки Z , одновременно выталкивая с позиции Z спутник с замечатанным мешком, при этом происходит отделение запечатан- ного мешка от спутника, который попадает в отдельный накопитель (не показан), а готовый запечатанный мешок по лотку 28 подается на транспортер 16 и удаляется на склад. При этом датчик, фиксирующий выхрд упакованного мешка из устройства 15 упаковкИ} подает сигнал на индикацию количества упакованных порций изделий. Кроме того, в электросхдме
Устройства упаковки имеется выход $а систему управления верхнего уров- фя (не показан) для оперативного учета выпуска продукции.
При поступлении очередного спут- йика с пустым мешком на позицию (агрузки Z устройство 15 упаковки позвращается в исходное положение, па перегрузочное устройство 14 и vзeл 13 взвешивания подается сигнал фт датчика готовности очередного мешка под загрузку о готовности устрой- (;тва 15 упаковки порции изделий к дальнейшей работе.
Использование предлагаемой авто- Аатической линии позволяет увеличить производительность получения готовой продукции за счет значительного сни- кения трудоемкости упаковочных one- наций при использовании автоматизации по сравнению с традиционными способами упаковки вручную. Повышение производительности составляет 5-20%. .
Кроме того, автоматизация транспортных операций при упаковке и саfilS.f
W
59 П t
иг.2
мой упаковки позволяет исключить неучтенные и непроизводственные потери готовых изделий, что особенно необходимо при изготовлении изделий из дорогих металлов, за счет 100%-ног автоматического учета выпуска готовой продукции, замены несовершенной технологии с использованием ручного труда.
Фо рмула изобретения
Автоматическая линия изготовления изделий из металлических порошко по авт.ев, № 1315138, отличающаяся тем, что, с целью повьше- ния производительности и увеличения выхода годной продукции, она снабжена устройством упаковки порции изделий и перегрузочным устройством, ус- тановленны между узлом взвешивания порции изделий и устройством упаковки, при этом перегрузочное устройство и устройство упаковки электрически соединены между собой и с узлом взвешивания.
27 ti
12
П
18
Г4
21
26
21
16
Фиг.З
is
23
| Автоматическая линия изготовления изделий из металлических порошков | 1985 |
|
SU1315138A2 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
