Изобретение относится к системе привода согласно ограничительной части пункта 1 формулы изобретения, а также к способу управления подобного рода системой привода.
Известно, что устройства или машины для обработки бутылок, банок или подобных емкостей, как, например, это описано в DE 19043907 А1, оборудованы имеющимися сменными системами привода. У подобного рода машин имеется горизонтально расположенный ротор, по периметру которого имеется большое количество тарельчатых носителей емкостей, которые несут бутылки, банки или нечто подобное. Емкости насаживаются в точке периметра ротора на носитель емкости и с помощью соответствующего средства фиксируются на носителях, так что они при вращении носителя емкостей вращаются вместе с ним. При обороте ротора емкости движутся вдоль большого количества технологических позиций, которые снабжают емкости, например, этикетками или надпечатками, в зависимости от оборудования машины.
Для вращения носителей емкостей и емкостей, находящихся на них, предусмотрен сервопривод. Для точного ориентирования емкости относительно технологической позиции, мимо которой она движется, наряду с прочим, к тому же предусмотрены датчики измерения угла и электроника управления, которая обеспечивает точное ориентирование емкости при выполнении поворота на технологической позиции. Известна компоновка сервопривода с электроникой управления, датчиками и при необходимости еще другими конструктивными элементами в виде компактного модульного стандартного блока в качестве системы привода, который устанавливается на роторе с возможностью замены.
Машина имеет расположенное выше устройство управления машины, которое управляет обработкой емкости при проходе через машину. Для передачи сигналов управления отдельным элементам машины предусмотрены различные коммуникационные устройства, например шинная система или нечто подобное.
Модульные унифицированные узлы привода снабжены электронным устройством управления, которое содержит необходимые для функционирования привода программы управления, например, для обработки информации от датчиков и точной настройки заданного углового положения.
Модульное исполнение системы привода позволяет проводить быструю замену дефектного привода на машине. Не нужно проводить каких-либо требующих затрат работ по извлечению и установке, так как комплектный модуль может заменяться полностью. Правда, при этом возникает проблема, что класс описываемых машин очень велик и вследствие этого конструкция машин очень различна. В связи с этим в зависимости от вида машин сервоприводы должны выполнять различные требования, что достигается благодаря применению различных программ управления для систем привода различных машин. При замене программная версия, используемая внутри системы привода, должна подходить для соответствующей машины, что согласно уровню техники требует запаса большого количества систем привода с тем, чтобы иметь возможность реагировать, как описано, на неисправности в различных типах машин.
Задачей изобретения является создание системы привода описанного рода, которая может применяться в большом количестве различных машин без производимой вручную подгонки и таким образом не имеет описанных выше недостатков.
Для решения этой задачи предлагается система привода с признаками, приведенными в пункте 1 формулы изобретения.
Система привода имеет конфигурацию, которая может применяться в большом количестве машин для обработки. Благодаря перезаписываемому запоминающему устройству для программ управления или микропрограммному обеспечению версия, подходящая соответственно для машины, может передаваться в запоминающее устройство системы привода. В отличие от существующих систем, у которых это осуществляется с помощью специально установленного технического обеспечения или замены самого запоминающего устройства, в соответствии с настоящим изобретением передача может осуществляться непосредственно от расположенного выше управляющего устройства машины в запоминающее устройство.
После окончания сборки или замены системы привода в машине через имеющийся коммуникационный интерфейс происходит соединение между запоминающим элементом или электронным устройством для управления, регулирования и/или контроля системы привода с расположенным выше управляющим устройством машины. Оно в этом случае может сразу же передавать точно подходящую для этой машины программу управления в запоминающее устройство.
Таким образом не требуется иметь в запасе специальные для каждого типа машин не заменяющие друг друга системы привода, а должна иметься единственная система привода, которая просто после установки в машине снабжается необходимыми программами управления и потом в полностью пригодном для работы виде применяется в этой машине.
При этом программа управления может быть записана в самом управляющем устройстве машины или на внешних, доступных для управляющего устройства машины, запоминающих блоках. Известные управляющие устройства часто имеют интегрированные гибко устанавливаемые запоминающие устройства, которые могут использоваться для этой цели.
В связи с этим управляющее устройство машины выполнено, например, в виде SPS, PC или микроконтроллера.
При этом программа управления целесообразно записана в применяемом для системы привода формате данных, т.е., например, в форме двоичных файлов, так что она просто непосредственно может передаваться в запоминающее устройство системы привода и не должно проводиться каких-либо требующих затрат шагов по преобразованию.
Для отличия различных программ управления они могут иметь элемент идентификации версии, который может отбираться управляющим устройством машины. Таким образом, имеется простая возможность отличать одну от другой версии программ управления, чтобы удостовериться, какая программа является необходимой для реальной машины. В этом случае управляющее устройство машины выполнено с возможностью сравнивать элемент идентификации версии вновь установленного привода с имеющимся в его запоминающем устройстве и определять необходимость замены имеющейся в памяти программы. Если это требуется, то управляющее устройство машины передает имеющуюся в памяти программу управления системе привода и переписывает, к примеру, уже имеющуюся в запоминающем устройстве программу, так что она в итоге будет содержать соответственно подходящую программу.
Это может осуществляться автоматически или в ручном режиме, причем целесообразно после смены системы привода проводить проверочное испытание. Необходимая смена при необходимости может также осуществляться автоматически или после подтверждения, например, обслуживающим персоналом.
Эти и другие исполнения изобретения следуют из зависимых пунктов.
Для решения задачи, кроме того, предлагается устройство для обработки бутылок, банок или подобных емкостей согласно пункту 9 формулы изобретения. Это устройство решает точно также поставленную задачу предпочтительным образом.
Далее изобретение для решения задачи предлагает способ управления системой согласно пункту 10 формулы изобретения, который точно также решает предпочтительным способом поставленную задачу.
Ниже изобретение более подробно поясняется с помощью чертежей, где показывают:
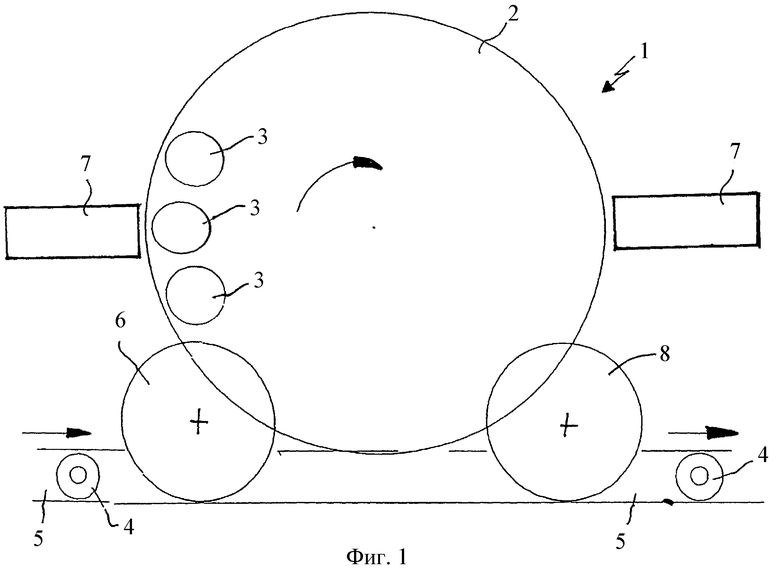
фиг.1 - Схематическое изображение вида сверху предложенной в соответствии с изобретением машины для обработки и
фиг.2 - Схематическое изображение частичного разреза предложенной в соответствии с изобретением системы привода.
Предложенная в соответствии с изобретением машина 1 для обработки схематически изображена на фиг.1. Она имеет ротор 2 в форме круга, установленный с возможностью вращения вокруг вертикальной оси, который приводится во вращение подробно не показанной системой привода. На роторе установлено несколько носителей 3 емкостей, которые вращаются вместе с ротором и которые могут вращаться вокруг своей центральной оси.
Емкости 4, например бутылки, доставляются к машине транспортным механизмом 5 и с помощью транспортной звездочки 6 насаживаются на носители 3 емкостей, где они не показанным подробно крепежным устройством сверху прижимаются к носителям 3 емкостей.
С помощью вращающегося ротора 2 емкости движутся мимо технологических позиций 7, которые снабжают емкости, например, этикетками с передней и задней стороны. Для этого благодаря вращению носителя 3 емкости с одной стороны обеспечивается точное расположение этикеток на передней и задней сторонах и благодаря соответствующему вращению емкости 4 при перемещении мимо обеспечивается чистое нанесение этикеток. После того как емкости прошли все технологические позиции, с помощью другой транспортной звездочки 8 после отсоединения крепежного механизма они снимаются с носителей 3 емкости и отправляются на транспортный механизм 5, которым они транспортируются дальше.
Для точного позиционирования носителей 3 емкостей предусмотрена система привода 9, которая более подробно представлена на фиг.2. Система 9 привода выполнена в виде компактного модуля и устанавливается со своей закрывающей пластиной 10 в соответствующей выемке в роторе 2 и там закрепляется. Она на своей верхней стороне перемещает соответственно носитель 3 емкости.
Для точного поворота носителя 3 емкости внутри предусмотрен сервопривод 11, ось вращения которого непосредственно, или через передаточный механизм, соединена с осью вращения носителя 3 емкости.
Для определения фактического углового положения сервопривода 11 и таким образом носителя 3 емкости на сервоприводе 11 предусмотрен датчик 12 угла поворота. Другой датчик 13 предусмотрен для контроля других рабочих параметров и обнаружения неисправностей.
Датчики 12 и 13 соединены с блоком 14 управления. Он имеет внутренний блок 15 памяти для регистрации текущих рабочих параметров и другое запоминающее устройство 16 для приема программы управления.
Блок 14 управления с помощью коммуникационного интерфейса 17 через разъемное соединение 18 соединен с внешней шинной системой 19.
Шинная система 19 кроме соединения с предложенной в соответствии с изобретением системой 9 привода соединена с расположенным выше управляющим устройством 20 машины. Оно контролирует функции машины 1 с помощью некоторого числа подробно не показанных датчиков и направляет сигналы управления различным компонентам машины. Наряду с прочим оно посылает соответствующие сигналы управления, которые касаются фактически необходимого позиционирования носителя 3 емкости, системе 9 привода.
Эти сигналы управления, передаваемые через шинную систему 19 и коммуникационный интерфейс 17, передаются устройству 14 управления, обрабатываются там и на основании фактического положения носителя 3 емкости, определяемого датчиком 12, генерируются соответствующие импульсы управления для необходимого поворота серводвигателя и передаются ему. Дополнительно описанным способом обратная информация о фактическом положении носителя 3 емкости от устройства 14 управления передается управляющему устройству 20 машины.
Управляющее устройство 20 машины имеет, кроме того, зону 21 памяти, в которой записаны необходимые программы управления для отдельных компонентов машины. Кроме того, управляющее устройство 20 машины через шинную систему 19 опрашивает отдельные блоки управления, какой элемент идентификации версии имеют программы управления, записанные в их запоминающих устройствах 16. Кроме того, управляющее устройство 20 машины может эти элементы идентификации сравнивать с элементами идентификации программ управления, записанных в их памяти. Кроме того, имеется возможность передавать программы управления, записанные в памяти 21, через коммуникационные интерфейсы 17 к выбранным блокам 14 управления и переписывать записанные там в блоке 16 памяти программы управления.
В случае дефекта в какой-либо части системы 9 привода этот дефект распознается блоком 14 управления и через коммуникационные соединения 17 передается управляющему устройству 20 машины. Независимо от тяжести дефекта в результате срабатывает тревога и машина останавливается. Кроме того, оно уведомляет соответствующим сообщением и идентифицирует соответствующую систему привода.
В результате эта система 9 привода может заменяться работоспособной системой, при этом комплектный блок извлекается из ротора 2, в который снова устанавливается новый работоспособный блок и закрепляется там. В итоге потребуется только присоединить электрические и коммуникационные соединения и машина снова в основном готова к работе.
Управляющее устройство 20 машины после произведенной установки запрашивает элемент идентификации версии программы управления, хранимой в блоке 16 памяти вновь установленного блока 14 управления, и сравнивает этот элемент идентификации с тем элементом программы управления, который записан в ее памяти 21 и является необходимым для корректного функционирования машины. Если оба элемента идентификации совпадают, то генерируются соответствующие сигналы и машина 1 снова включается в работу.
Если элементы идентификации версии не совпадают, управляющее устройство 20 машины передает копию подходящей программы управления, находящейся в его памяти 21, через шинную систему 19 и коммуникационное соединение 17 блоку 14 управления, который переписывает уже находящуюся в его запоминающем устройстве 16 программу управления. После окончания процесса передачи и при необходимости проверочного испытания, прошла ли передача, теперь в замененной системе 9 привода будет находиться также корректная программа управления, так что в итоге, как описано выше, управляющим устройством машины возобновляется работа машины 1.
Выше в описании примера осуществления речь шла исключительно о программном обеспечении управления. В рамках данного изобретения под понятием «программное обеспечение управления» следует понимать всякое программное обеспечение, необходимое для работы системы привода, причем в рамках изобретения не обязательно, чтобы программное обеспечение полностью передавалось управляющим устройством 20 машины в запоминающее устройство 16 системы привода. Возможно, например, что часть необходимого программного обеспечения имеется внутри системы привода.
В рамках данного изобретения под понятием «программное обеспечение управления» следует понимать как компоненты программного обеспечения, которые обычно известны в качестве операционной системы, так и компоненты программного обеспечения, которые обычно известны в качестве прикладного программного обеспечения.
При этом под понятием «операционная система» понимаются программы или данные, которые стоящему выше программному обеспечению, например программному обеспечению управления, выделяют в распоряжение информацию и сигналы управления, необходимые для работы конструктивных элементов (компонентов аппаратурной части), содержащихся внутри системы привода. Под «прикладным программным обеспечением» в представленном примере осуществления, например, понимается программа вращения, т.е. указание, как должна вращаться емкость при вращении ротора.
Естественно, изобретение не ограничено приведенным выше примером осуществления, а может модифицироваться в разнообразном отношении, не пренебрегая основной изобретательской идеей.
Так не является необходимым применение системы привода только для привода тарельчатого носителя емкости. Напротив, большое количество систем привода, которые применяются в машинах для обработки, может быть устроено в виде модульных блоков и с помощью применения соответствующей программы управления подбираться для соответствующих целей применения. Естественно, что и в подобного рода системах изобретение находит применение.
Также другие модификации изобретения, например применение внешних запоминающих устройств, вместо интегрированных блоков памяти, имеющие форму звезды коммуникационные системы вместо применения шинной системы, большое количество возможных приводов могут быть перечислены здесь только, например, в качестве доступной модификации.
Перечень позиций
1 Машина для обработки
2 Ротор
3 Носитель емкости
4 Емкость
5 Транспортный механизм
6 Транспортная звездочка
7 Технологическая позиция
8 Транспортная звездочка
9 Система привода
10 Закрывающая пластина
11 Сервопривод
12 Датчик угла поворота
13 Датчик
14 Блок управления
15 Блок памяти
16 Запоминающее устройство
17 Коммуникационный интерфейс
18 Разъемное соединение
19 Шинная система
20 Управляющее устройство машины
21 Запоминающее устройство
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОЦЕДУРЫ ЗАГРУЗКИ ДЛЯ ПЕРИФЕРИЙНЫХ УСТРОЙСТВ | 2004 |
|
RU2331928C9 |
| АРХИТЕКТУРА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ USB В ИГРОВОЙ МАШИНЕ | 2004 |
|
RU2331927C9 |
| УСТРОЙСТВО ХРАНЕНИЯ РАЗЛИЧНЫХ ВЕРСИЙ НАБОРА ДАННЫХ В ОТДЕЛЬНЫХ ОБЛАСТЯХ ПАМЯТИ И СПОСОБ ОБНОВЛЕНИЯ НАБОРА ДАННЫХ В ПАМЯТИ | 1999 |
|
RU2235356C2 |
| ПРОТОКОЛЫ И СТАНДАРТЫ ДЛЯ КОММУНИКАЦИЙ С USB-ПЕРИФЕРИЕЙ | 2004 |
|
RU2331926C9 |
| УСТРОЙСТВО ЗАЩИТЫ ИНФОРМАЦИИ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА ДЛЯ КОМПЬЮТЕРОВ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ | 2006 |
|
RU2321055C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СВЯЗИ В КОММУНИКАЦИОННОЙ СРЕДЕ, КОМПЬЮТЕРНАЯ СИСТЕМА И ЭНЕРГОНЕЗАВИСИМЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ ДАННЫХ | 2012 |
|
RU2574815C2 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА К ИНФОРМАЦИИ | 2007 |
|
RU2334272C1 |
| РЕКОМЕНДАТЕЛЬНАЯ СИСТЕМА ДЛЯ ПОПОЛНЕНИЯ ДАННЫХ | 2012 |
|
RU2611966C2 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА К ИНФОРМАЦИИ, ХРАНИМОЙ В ПЕРСОНАЛЬНОЙ ЭВМ | 2003 |
|
RU2263950C2 |
| ЗАЩИЩЁННОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 2018 |
|
RU2768196C2 |
Изобретение относится к области электротехники и может быть использовано в устройствах или машинах. Техническим результатом является возможность применения в большом количестве различных машин без подгонки ручным способом. Система (9) привода для применения в устройствах или машинах (1), которые имеют расположенное выше управляющее устройство (20) машины, выполнена сменной и имеет, по меньшей мере, один элемент привода, электронное устройство (14) управления, и/или регулирования, и/или контроля, запоминающее устройство (16) для записи программы управления для электронного устройства (14) управления, и/или регулирования, и/или контроля. В системе (9) привода и управляющем устройстве (20) машины предусмотрены соответствующие коммуникационные интерфейсы (17). Запоминающее устройство (16) выполнено с возможностью перезаписи таким образом, что программа управления с помощью коммуникационных интерфейсов (17) может передаваться от управляющего устройства (20) машины в запоминающее устройство (16). 3 н. и 8 з.п. ф-лы, 2 ил.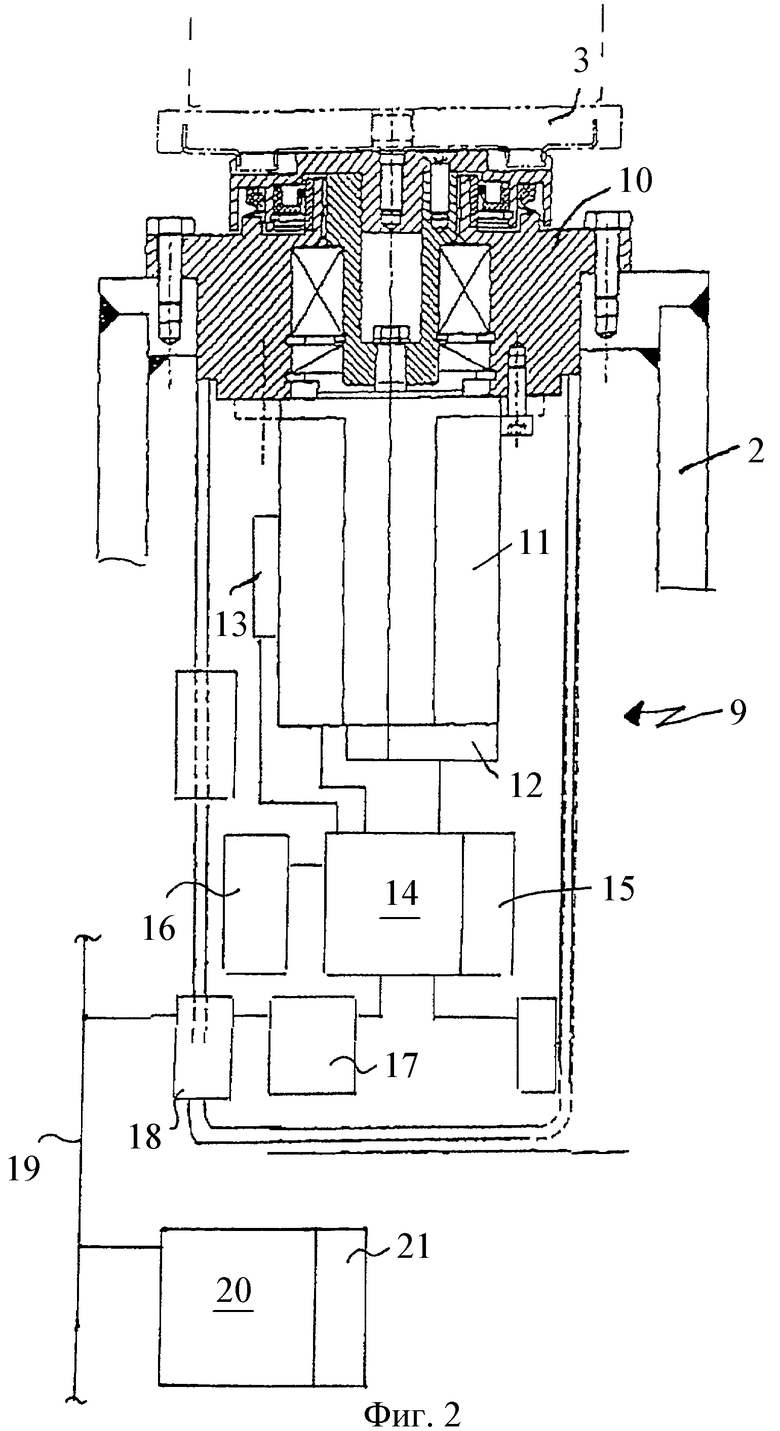
1. Система (9) привода для применения в устройствах или машинах (1) для обработки бутылок, банок или подобных емкостей, причем устройства или машины имеют выше стоящее управляющее устройство (20) машины и система (9) привода выполнена сменной и имеет, по меньшей мере, один элемент привода, электронное устройство (14) управления, и/или регулирования, и/или контроля, а также запоминающее устройство (16) для записи программы управления для электронного устройства (14) управления, и/или регулирования, и/или контроля, отличающаяся тем, что в системе (9) привода и управляющем устройстве (20) машины предусмотрены соответственно корреспондирующие коммуникационные интерфейсы (17) и запоминающее устройство (16) выполнено с возможностью перезаписи таким образом, что программа управления с помощью коммуникационных интерфейсов (17) от управляющего устройства (20) машины может передаваться в запоминающее устройство (16), причем каждая программа управления имеет элемент идентификации версии и управляющее устройство (20) машины предусмотрено для отбора элемента идентификации программы управления, хранимой в запоминающем устройстве (16) системы (9) привода.
2. Система привода по п.1, отличающаяся тем, что управляющее устройство (20) машины выполнено с возможностью запоминания, по меньшей мере, одной программы управления для электронного устройства (14) управления, и/или регулирования, и/или контроля системы (9) привода.
3. Система привода по п.2, отличающаяся тем, что программа управления запоминается в управляющем устройстве (20) машины в формате данных, пригодном для электронного устройства (14) системы привода для управления, и/или регулирования, и/или контроля.
4. Система привода по п.1, отличающаяся тем, что управляющее устройство (20) машины предусмотрено для сравнения отобранного элемента идентификации с элементом идентификации программы управления, хранимой в управляющем устройстве (20) машины.
5. Система привода по п.4, отличающаяся тем, что управляющее устройство (20) машины в случае когда, отобранный элемент идентификации программы управления, хранимой в запоминающем устройстве системы (20) привода, не совпадает с элементом идентификации программы управления, хранимой в управляющем устройстве машины, программа управления, хранимая в управляющем устройстве (20) машины, с помощью коммуникационных интерфейсов (17) передается в запоминающее устройство (16) системы (9) привода.
6. Система привода по п.5, отличающаяся тем, что управляющее устройство (20) машины выполнено таким образом, что отбор элемента идентификации программы управления, хранимой в запоминающем устройстве (16) системы (9) привода, и сравнение с элементом идентификации программы управления, хранимой в управляющем устройстве (20) машины и/или передача программы управления, хранимой в управляющем устройстве (20) машины, в запоминающее устройство (16) системы (9) привода происходит после смены системы (9) привода и/или автоматически и/или по разрешающему сигналу.
7. Система привода по п.5 или 6, отличающаяся тем, что управляющее устройство (20) машины выполнено таким образом, что передача программы управления, хранимой в управляющем устройстве (20) машины, в запоминающее устройство (16) системы (9) привода осуществляется автоматически и/или по подтверждающему сигналу.
8. Устройство (1) для обработки бутылок, банок или подобных емкостей с управляющим устройством (20) машины и, по меньшей мере, одной системой (9) привода по любому из пп.1-7, отличающееся тем, что каждая программа управления имеет элемент идентификации версии и управляющее устройство (20) машины предусмотрено для отбора элемента идентификации программы управления, хранимой в запоминающем устройстве (16) системы (9) привода.
9. Способ управления системой (9) привода для применения в устройствах или машинах (1) для обработки бутылок, банок или подобных емкостей, причем устройства или машины (1) имеют расположенное выше управляющее устройство (20) машины, и система (9) привода выполнена сменной и имеет, по меньшей мере, один элемент привода, электронное устройство (14) управления, и/или регулирования, и/или контроля, а также запоминающее устройство (16) для записи программы управления для электронного устройства (14) управления, и/или регулирования, и/или контроля, отличающийся тем, что программу управления от управляющего устройства (20) машины через имеющиеся в системе (9) привода и управляющем устройстве (20) машины соответствующие коммуникационные интерфейсы передают в выполненное с возможностью перезаписи запоминающее устройство (16) системы (9) привода, причем каждая программа управления имеет элемент идентификации версии и посредством управляющего устройства (20) машины осуществляют отбор элемента идентификации программы управления, хранимой в запоминающем устройстве (16) системы (9) привода.
10. Способ по п.9, отличающийся тем, что программу управления передают один раз перед пуском в работу системы (9) привода.
11. Способ по п.9 или 10, отличающийся тем, что элемент идентификации версии, содержащийся в программе управления, управляющим устройством (20) машины отбирают из запоминающего устройства (16) системы (9) привода и сравнивают с элементом идентификации версии программы управления, хранимой в управляющем устройстве (20) машины, и в случае, когда отобранный и хранимый в управляющем устройстве (20) машины элементы идентификации версии различны, программу управления, хранимую в управляющем устройстве (20) машины, с помощью коммуникационных интерфейсов (17) передают в запоминающее устройство системы (9) привода.
| УПРАВЛЯЕМОЕ КОМПЬЮТЕРОМ ЭТИКЕТИРОВОЧНОЕ УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ НАКЛЕЙКИ ЭТИКЕТОК (ВАРИАНТЫ) | 1994 |
|
RU2134651C1 |
| US 4487650 A, 11.12.1984 | |||
| DE 3137201 A1, 31.03.1983 | |||
| DE 10353052 A1, 16.06.2005 | |||
| JP 2003035594 A, 07.02.2003 | |||
| Установка для хранения легкоиспаряющихся жидкостей | 1984 |
|
SU1174345A1 |

