Изобретение относится к электротехнике и может быть использовано в регулируемых электроприводах общепромышленных механизмов, а также транспортных средств.
Известны бесконтактные синхронные генераторы с возбудителем и вращающимся выпрямителем, с многофазной обмоткой якоря (статора) и силовым многофазным выпрямителем на выходе генератора (US 4121148, МПК Н02K 19/34; Н02Р 9/14, опубл. 17.10.1978). Однако размещение на роторе вращающейся обмотки возбуждения и диодов выпрямителя снижает механическую надежность генератора и не позволяет получить высокие угловые скорости вращения ротора.
Наиболее близким к заявляемому устройству является синхронная реактивная машина, содержащая многофазную силовую обмотку и многофазную обмотку возбуждения с полным шагом, подключаемую к управляемым возбудителям (RU 2240640, МПК H02G 1/02, опубл. 20.11.04 - прототип). Известное устройство снабжено дополнительными обмотками возбуждения с полным шагом, управляемыми возбудителями и датчиком положения ротора. Обмотки возбуждения размещены в пазах статора так, что магнитные оси их равномерно распределены вдоль воздушного зазора с образованием симметричной многофазной магнитной системы и подключены к выходам управляемых возбудителей. Первые управляющие входы возбудителей соединены с источником задания величины тока возбуждения, а вторые входы соединены с выходом датчика положения ротора устройства.
Особенностью указанного устройства является то, что возбуждение электрической машины создается по продольной оси не обмоткой возбуждения, расположенной на роторе, как в обычных синхронных электрических машинах, а током той фазы из дополнительных обмоток возбуждения, размещенных на статоре, витки которой в рассматриваемый момент времени расположены напротив межполюсного промежутка ротора и магнитная ось которой направлена, следовательно, вдоль продольной оси машины. При вращении ротора синхронной электрической машины витки обмотки возбуждения предыдущей фазы оказываются расположенными не в межполюсном промежутке, а напротив полюса ротора, поэтому ток в этой фазе уменьшают до нуля. Вместе с тем, межполюсный промежуток надвигается на витки следующей фазы обмотки возбуждения, ток в которой устанавливают равным току возбуждения электрической машины. Когда ротор электрической машины делает один полный оборот (электрический), токи во всех фазах обмотки возбуждения электрической машины поочередно устанавливают равными ее току возбуждения, пока витки этих фаз располагаются напротив межполюсного промежутка ротора.
Известен способ управления синхронным реактивным генератором автономной энергетической установки (RU 2240640, МПК H02G 1/02, опубл. 20.11.04 - прототип). В этом способе в зависимости от сигнала с выхода датчика положения ротора генератора поочередно пропускают импульсы тока от управляемых возбудителей по обмоткам возбуждения тех фаз, витки которых располагаются напротив межполюсных промежутков ротора.
Недостатком прототипа, как устройства, так и способа, является то, что это устройство предназначено для работы только в генераторном режиме и в нем не удается реализовать двигательный режим электрической машины.
В основу предлагаемого изобретения положена задача, заключающаяся в возможности работы устройства как в двигательном, так и в тормозном режимах электрической машины.
Решение поставленной задачи достигается тем, что электропривод с синхронной реактивной машиной, содержащей две группы трехфазных (многофазных) обмоток с полным шагом, равномерно распределенных вдоль внутренней расточки статора, датчик положения ротора, согласно изобретению снабжен тиристорным коммутатором, датчиком тока, включенным между катодными и анодными группами коммутатора, при этом обмотки одноименных фаз статора включены между собой согласно и последовательно так, что пространственные магнитные оси этих обмоток взаимно ортогональны, начала обмоток первой группы подключены к питающей сети, а концы второй группы - на вход тиристорного коммутатора, кроме того, выход датчика тока подключен к одному из входов регулятора тока, второй вход которого подключен к источнику задания величины тока, а выход регулятора тока и датчик положения ротора подключены к тиристорному коммутатору.
Управление электроприводом с синхронной реактивной машиной производится по сигналу с выхода датчика положения синхронной реактивной машины, при этом управляющие импульсы подают на два вентиля разноименных групп (катодных и анодных) тиристорного коммутатора так, чтобы линия физической нейтрали двигателя попадала под сбегающий край полюса ротора.
Особенностью предлагаемого решения является то, что, во-первых, благодаря тиристорному коммутатору импульсы выпрямленного тока протекают только по тем обмоткам, которые подключены к двум из трех фаз сети. При этом по последовательно включенным обмоткам, подключенным к третьей фазе питающей сети, ток не течет, т.к. ключи тиристорного коммутатора, подсоединенные к этим обмоткам, преднамеренно закрыты. Во-вторых, благодаря взаимному ортогональному пространственному расположению обмоток статора каждой фазы, когда витки одной из последовательно включенных обмоток находятся напротив межполюсного промежутка и тем самым создают магнитный поток, направленный вдоль магнитной оси ротора, витки второй обмотки этой фазы находятся над полюсом, взаимодействуют с потоком возбуждения первой обмотки, создавая двигательный электромагнитный момент электрической машины.
Ток через обмотки третьей фазы статора в рассматриваемый промежуток времени не пропускают, т.к. эти обмотки создавали бы момент противоположного знака.
По мере поворота ротора электрической машины тиристорный коммутатор производит поочередное подключение обмоток фаз статора к фазам питающей сети, создавая тем самым момент электрической машины. При этом ротор имеет явнополюсную конструкцию и не несет на себе обмоток.
Предлагаемое техническое решение сохраняет основные технические преимущества прототипа: простоту конструкции электрической машины, высокую технологичность ее изготовления, бесконтактное исполнение, высокую механическую прочность и жесткость ротора.
Сущность изобретения поясняется чертежами, где изображены: на фиг.1 - схематичный поперечный разрез синхронной реактивной машины; на фиг.2 - пример функциональной схемы; на фиг.3 - диаграммы, поясняющие принцип работы датчика положения ротора; на фиг.4 - направления токов в обмотках статора и пространственное положение линий N-N физической нейтрали при вращении ротора.
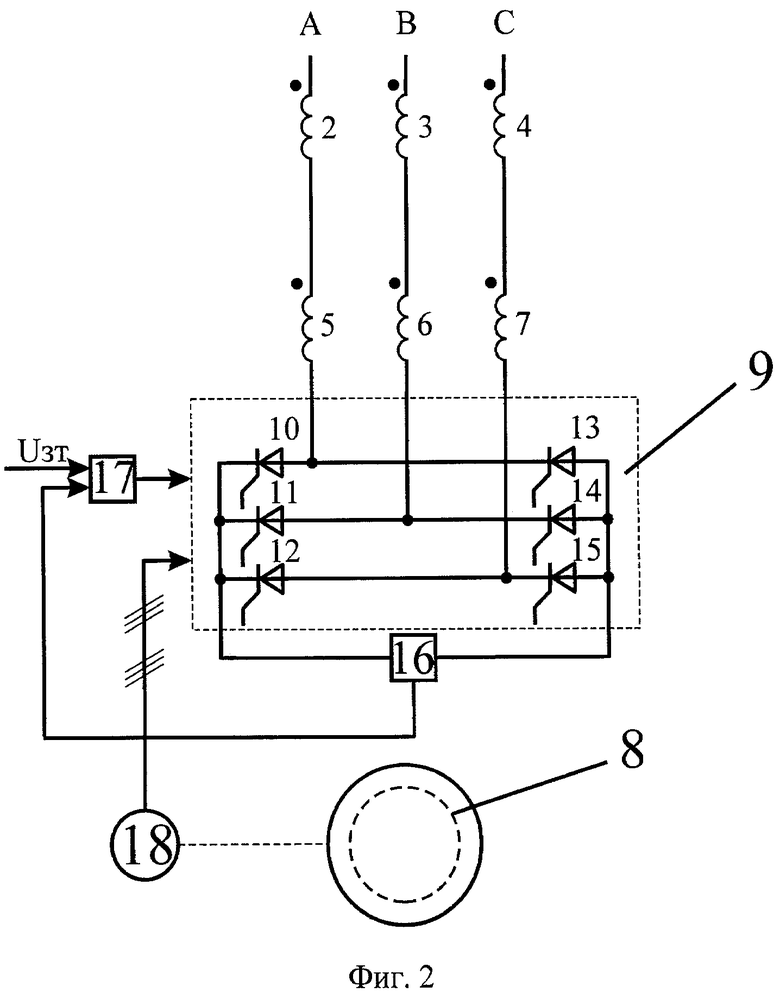
На фиг.1 представлен в разрезе пример шестифазной синхронной реактивной машины, когда в пазах статора 1, расположенных в плоскостях А-А′, В-В′ и С-С′, сдвинутых пространственно на 120 электрических градусов, размещены обмотки 2, 3, 4. В пазах статора 1, расположенных в плоскостях a-a′, b-b′, с-с′, сдвинутых между собой также на 120 электрических градусов, размещены такие же обмотки 5, 6, 7. Обмотки 2 и 5, 3 и 6, 4 и 7 соединены между собой согласно и последовательно. Магнитные оси обмоток одноименных фаз 2 и 5, расположенных в плоскостях А-А′, а-а′, 3 и 6, расположенных в плоскостях В-В′, b-b′, 4 и 7, расположенных в плоскостях С-С′ и с-с′, сдвинуты относительно друг друга пространственно на 90 электрических градусов. Обмотки 2, 3, 4, 5, 6 и 7 образуют одну многофазную электрическую схему.
Ротор 8 синхронной реактивной машины выполнен явнополюсным. В примере, изображенном на фиг.1, длина полюсной дуги ротора составляет 90°, длина межполюсного промежутка также 90°.
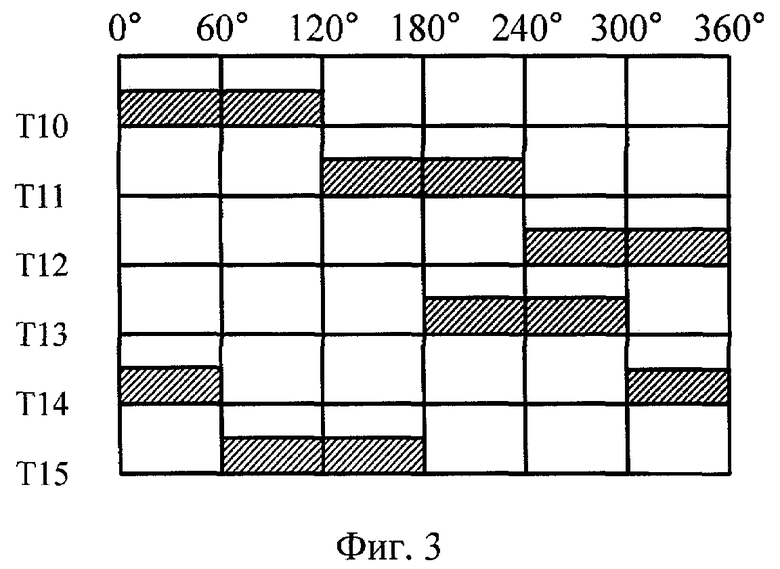
Начала обмоток 2, 3 и 4 (фиг.2) подключены к фазным зажимам А, В, С источника трехфазного напряжения питания. Концы обмоток 5, 6 и 7 подключены ко входу тиристороного коммутатора 9. Тиристоры 10, 11 и 12 образуют катодную группу, а тиристоры 13, 14 и 15 - анодную группу вентилей. Между анодной и катодной группой вентилей включен датчик тока 16. На первый управляющий вход тиристорного коммутатора 9 подключен выход регулятора тока 17, а на последующие шесть его управляющих входов подключены выводы датчика 18 положения ротора 8. Этот датчик механически связан с валом ротора синхронной реактивной машины. На первый управляющий вход регулятора тока 17 подается напряжение UЗT, пропорциональное желаемой величине тока ротора, а на второй - сигнал с датчика тока 16.
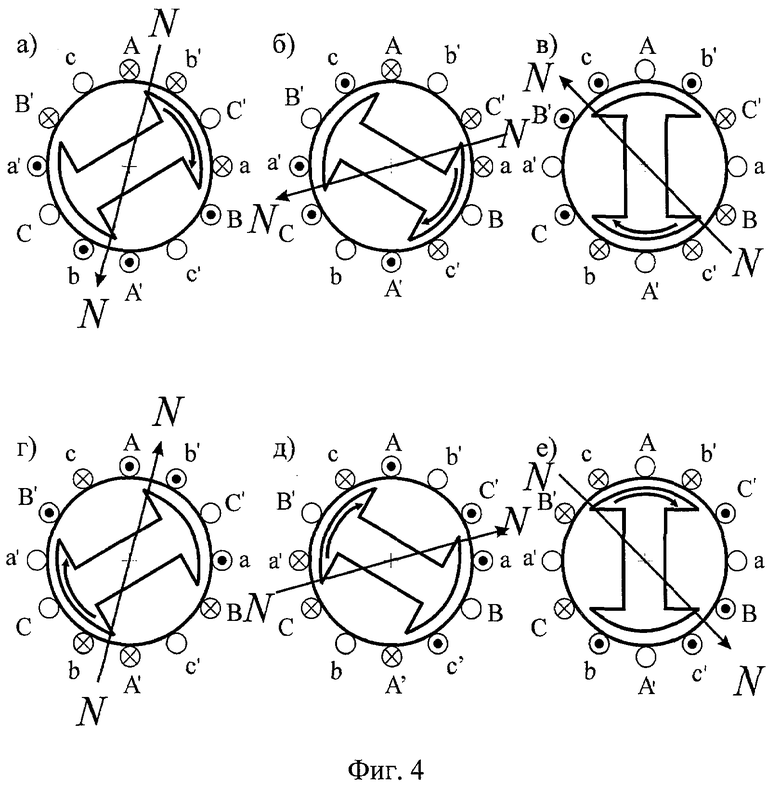
Диаграмма, поясняющая принцип работы датчика 18 положения ротора 8, изображена на фиг.3. Здесь в зависимости от угла поворота вала ротора 8 двигателя датчик 18 положения ротора 8 разрешает подачу управляющих импульсов на тиристоры анодной и катодной групп коммутатора в следующей последовательности: при изменении угла α поворота ротора 8 от нуля до 120 градусов (электрических) разрешается отпирать тиристор 10, от 120 до 240 градусов - тиристор 11, от 240 до 360 - тиристор 12, принадлежащие катодной группе коммутатора 9. Одновременно датчик 18 положения ротора разрешает подачу отпирающих импульсов на тиристоры анодной группы: при изменении угла α от 60 до 180 градусов разрешается отпирать тиристор 15, от 180 до 300 градусов - тиристор 13 и, наконец, от 300 до 60 градусов следующего электрического оборота ротора 8 - тиристор 14.
Благодаря выбранной последовательности отпирания тиристоров достигается дискретное (шаговое) круговое перемещение вектора магнитодвижущей силы (МДС) статора в воздушном зазоре двигателя.
Величина тока в обмотках статора задается напряжением UЗТ на входе регулятора тока 17.
За исходное состояние схемы принимается мгновенное состояние всех ее элементов, когда вращающийся по часовой стрелке ротор 8 занимает пространственное положение, как на фиг.1. Это же положение зафиксировано на фиг.4, а.
В положении ротора, принятом за исходное, управляющие импульсы подаются только на тиристоры 10 и 14. Поэтому ток протекает от фазы А питающей сети к фазе В только в положительные полупериоды приложенного напряжения и по следующей цепи (см. фиг.2): фаза А - обмотка 2 - обмотка 5 - тиристор 10 - датчик тока 16 - тиристор 14 - обмотка 6 - обмотка 3 - фаза В. Направления токов во всех обмотках статора 1, соответствующие описанному исходному мгновенному положению ротора 8, указаны на фиг.1 и на фиг.4, а. Там же указаны и мгновенные пространственные положения линии N-N физической нейтрали в электрической машине. Физическая нейтраль - это продольная линия на поверхности якоря электрической машины, на которой индукция в зазоре Bδ=0 (см., например, Вольдек А.И. Электрические машины. Учебник для вузов. - 3-е изд. - Л.: Энергия, 1978, с.100).
В исходном положении ротора 8 (см. фиг.1 и фиг.4, а) обмотки статора 2 (лежит в плоскости А-А′) и 3 (лежит в плоскости В-В′) находятся напротив межполюсного промежутка и, следовательно, создают МДС, направленную вдоль продольной оси ротора 8, т.е. выполняют роль обмоток возбуждения двигателя. Обмотки 5 (лежит в плоскости а-а′) и 6 (лежит в плоскости b-b′) работают как обмотки якоря и создают вращающий момент.
Электропривод работает следующим образом.
Так как электрическая машина развивает момент, то ротор 8 приходит во вращение по часовой стрелке.
Когда ротор 8 машины повернется из положения (см. фиг.4, а) на угол 60 градусов, то в соответствии с диаграммой (см. фиг.3) датчик 18 положения ротора прекратит подачу отпирающих импульсов на тиристор 14, но одновременно разрешит их подавать на тиристор 15. В результате импульсы тока от питающей сети пойдут по цепи: фаза А - обмотка 2 - обмотка 5 - тиристор 10 - датчик тока 16 - тиристор 15 - обмотка 7 - обмотка 4 - фаза С, а вектор МДС статора и пространственная линия N-N физической нейтрали также повернутся по часовой стрелке на 60 градусов. При этом из-за изменения направления токов, протекающих по обмоткам статора, изменяются их функции следующим образом: обмотки 2 и 4 выполняют роль обмоток возбуждения, а обмотки 5 и 7 - обмоток якоря (см. фиг.4, б). В результате синхронная реактивная машина продолжает развивать момент, направленный по часовой стрелке.
Наибольшая величина момента, которую развивает синхронная реактивная машина в режиме двигателя, наблюдается тогда, когда пространственная линия N-N физической нейтрали проходит (см. фиг.4) через сбегающий край полюса ротора.
Через 120 градусов (фиг.3) датчик 18 положения ротора запрещает подавать управляющие импульсы на управляющий вход тиристора 10, но разрешает подавать их на управляющий вход тиристора 11. Через 180 градусов импульсы снимаются с тиристора 15 и подаются на тиристор 13 и т.д. Осуществляя таким образом через каждые 60 градусов переключения токов в фазных обмотках статора, обеспечивают пространственное круговое движение МДС статора вдоль окружности воздушного зазора двигателя так, что эта МДС перемещается синхронно с вращающимся ротором двигателя. Благодаря такому совместному вращательному движению ротора двигателя и МДС обмотки статора достигается непрерывность вращающего момента двигателя.
Величина момента двигателя определяется величиной тока, протекающего по обмоткам ротора и статора двигателя. Величина же этого тока задается напряжением UЗТ на входе регулятора тока 17.
Техническим результатом предлагаемого изобретения является регулируемый бесконтактный электропривод, который характеризуется повышенной надежностью в условиях работы с высокими угловыми скоростями и большими перегрузками по моменту, с тяжелыми и весьма тяжелыми условиями эксплуатации. При этом весь названный перечень привлекательных эксплуатационных характеристик электропривода достигается при относительно простом регулируемом источнике питания, который выполнен на тиристорном коммутаторе.
Промышленная применимость предлагаемого решения. Электропривод с синхронной реактивной машиной и способ управления им могут быть рекомендованы для общепромышленных механизмов (насосов, вентиляторов, транспортеров и т.д.).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2371831C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2005 |
|
RU2288535C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2009 |
|
RU2408973C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА В ЭЛЕКТРОПРИВОДЕ С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2013 |
|
RU2541359C1 |
| СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2007 |
|
RU2346376C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2007 |
|
RU2337466C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ С ФАЗНЫМ РОТОРОМ | 2023 |
|
RU2821722C1 |
| СИНХРОННЫЙ РЕАКТИВНЫЙ ГЕНЕРАТОР АВТОНОМНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2003 |
|
RU2240640C1 |
| Устройство для пуска и возбуждения синхронного двигателя | 1990 |
|
SU1823118A1 |
Изобретение относится к электротехнике и может быть использовано в регулируемых электроприводах общепромышленных механизмов, а также в транспортных средствах, а именно тяговых электроприводах автомобилей, тракторов, вездеходов и т.д. Технический результат - повышенная надежность в условиях работы с высокими угловыми скоростями и большими перегрузками по моменту, с тяжелыми и весьма тяжелыми условиями эксплуатации, возможность работы устройства как в двигательном, так и в тормозном режимах электрической машины. Электропривод с синхронной реактивной машиной содержит две группы трехфазных (многофазных) обмоток с полным шагом, равномерно распределенных вдоль внутренней расточки статора, датчик положения ротора. Электропривод снабжен тиристорным коммутатором, датчиком тока, включенным между катодными и анодными группами коммутатора, при этом обмотки одноименных фаз статора включены между собой согласно и последовательно так, что пространственные магнитные оси этих обмоток взаимно ортогональны. Начала обмоток первой группы подключены к питающей сети, а концы второй группы - на вход тиристорного коммутатора, кроме того, выход датчика тока подключен к одному из входов регулятора тока, второй вход которого подключен к источнику задания величины тока, а выход регулятора тока и датчик положения ротора подключены к тиристорному коммутатору. По сигналу с выхода датчика положения ротора управляющие импульсы подают на два вентиля разноименных групп тиристорного коммутатора так, чтобы линия физической нейтрали двигателя попадала под сбегающий край полюса ротора. 2 н.п. ф-лы, 4 ил.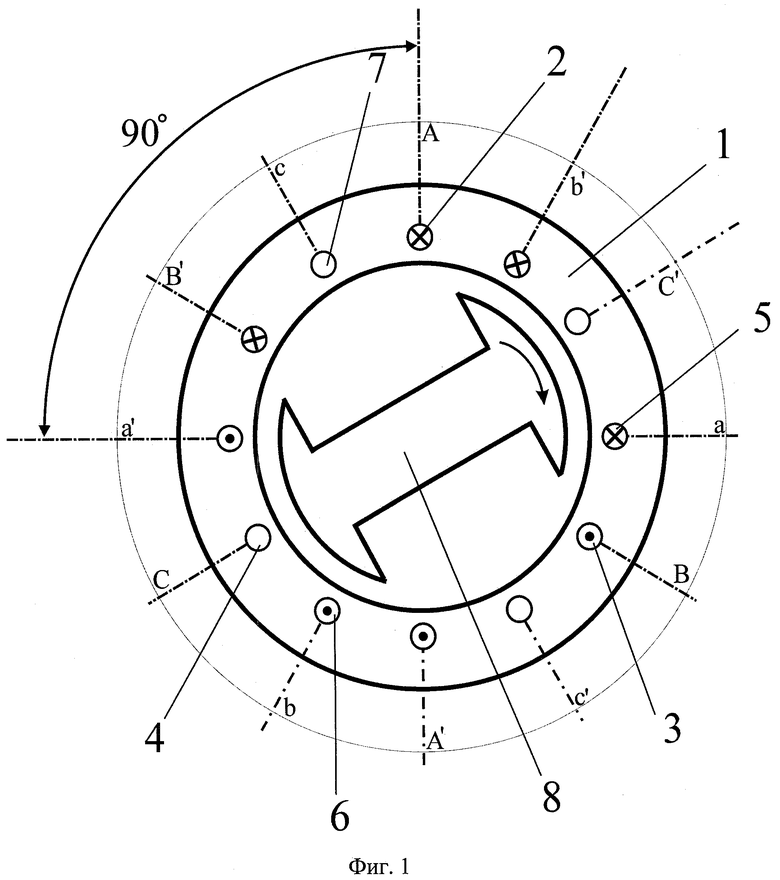
1. Электропривод с синхронной реактивной машиной, содержащей две группы трехфазных (многофазных) обмоток с полным шагом, равномерно распределенных вдоль внутренней расточки статора, датчик положения ротора, отличающийся тем, что он снабжен тиристорным коммутатором, датчиком тока, включенным между катодными и анодными группами коммутатора, при этом обмотки одноименных фаз статора включены между собой согласно и последовательно так, что пространственные магнитные оси этих обмоток взаимно ортогональны, начала обмоток первой группы подключены к питающей сети, а концы второй группы - на вход тиристорного коммутатора, кроме того, выход датчика тока подключен к одному из входов регулятора тока, второй вход которого подключен к источнику задания величины тока, а выход регулятора тока и датчик положения ротора подключены к тиристорному коммутатору.
2. Способ управления электроприводом с синхронной реактивной машиной, включающий создание магнитного потока, направленного по продольной магнитной оси ротора в зависимости от сигнала с выхода датчика положения ротора, отличающийся тем, что по сигналу с выхода этого датчика управляющие импульсы подают на два вентиля разноименных групп (катодных и анодных) тиристорного коммутатора так, чтобы линия физической нейтрали двигателя попадала под сбегающий край полюса ротора.
| СИНХРОННЫЙ РЕАКТИВНЫЙ ГЕНЕРАТОР АВТОНОМНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2003 |
|
RU2240640C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОЙ МАШИНЫ | 1999 |
|
RU2145766C1 |
| Система автоматического регулирования возбуждения синхронного компенсатора | 1988 |
|
SU1631692A1 |
| US 4121148 A, 17.10.1978 | |||
| US 3996507 A, 07.12.1976 | |||
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ И ОХЛАЖДЕНИЯ ПЛАСТМАССОВЫХ ПРОФИЛЕЙ | 1998 |
|
RU2145545C1 |

