Изобретение относится к электротехнике и может быть использовано, например, в регулируемых электроприводах общепромышленных механизмов, а также транспортных средств.
Известны электроприводы, которые содержат синхронную реактивную электрическую машину с независимым возбуждением (см. Вентильный электропривод с синхронной реактивной машиной независимого возбуждения / Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков // Электроехника. - 2013. - №3. - С.37-43). Особенностью этого электрического двигателя является то, что фазные обмотки статора выполнены с полным шагом. Это дает возможность независимо регулировать как ток возбуждения, который создается витками секций обмоток, расположенными над межполюсным промежутком, так и якорный (активный) ток, который протекает по виткам секций обмотки статора, расположенным над полюсами ротора, и который создает электромагнитный момент. Недостатком устройства, описанного в указанной публикации, является то, что в ней не указано, как можно в этом электроприводе измерять и регулировать момент.
В качестве прототипа выбраны устройство и способ измерения электромагнитного момента автономной энергетической установки (см. патент РФ №2240640, МПК7 H02G 1/02. Синхронный реактивный генератор автономной энергетической установки и способ управления им / Ю.С. Усынин, С.М. Бутаков, М.А. Григорьев, К.М. Виноградов). В установке применена синхронная реактивная машина с независимым возбуждением, а обмотки якоря и возбуждения выполнены с полным шагом. В указанном патенте приведен способ управления токами статора синхронной реактивной машины, однако устройство и способ не решают задачу измерения электромагнитного момента, что значительно сужает их функциональные возможности.
В обоих приведенных примерах система управления выполняется, как правило, по подчиненному принципу, где внутренними являются m контуров регулирования фазных токов (где m - число фаз обмотки статора), а внешним - контур регулирования скорости. Вместе с тем, в регулируемых электроприводах переменного тока часто требуется измерение величины электромагнитного момента двигателя.
В основу предлагаемого изобретения положена техническая задача, заключающаяся в расширении функциональных возможностей, повышении надежности и точности работы электропривода с синхронной реактивной машиной независимого возбуждения,.
Решение поставленной задачи достигается тем, что в электроприводе, содержащем синхронный реактивный двигатель, имеющий на статоре m-фазную обмотку с полным шагом, согласно изобретению в цепь каждой фазной обмотки статора включен последовательно датчик тока, выходные клеммы которого подключены к первой группе входных клемм первого коммутатора сигналов, а также к первой группе входных клемм второго коммутатора сигналов, а вторые группы входов первого и второго коммутаторов сигналов подключены к выходным клеммам датчика положения ротора электродвигателя, выходные клеммы первого коммутатора соединены с входными клеммами первого сумматора, а выходные клеммы второго коммутатора соединены с входными клеммами второго сумматора, выходные клеммы первого сумматора соединены с первыми входными клеммами блока произведения, а выходные клеммы второго сумматора соединены со вторыми входными клеммами блока произведения.
Дополнительно решение задачи достигается тем, что между выходом второго сумматора и вторым входом блока произведения включен функциональный преобразователь, учитывающий нелинейность кривой намагничивания электрической машины.
Решение поставленной задачи достигается также тем, что в способе измерения электромагнитного момента синхронного реактивного двигателя по сигналу датчика положения ротора сигналы датчиков токов фазных обмоток статора, витки которых находятся над полюсами, суммируются в первом сумматоре, выходной сигнал которого поступает на первый вход блока произведения, а сигналы датчиков токов фазных обмоток статора, витки которых находятся над межполюсными промежутками, суммируются во втором сумматоре, выходной сигнал которого поступает на второй вход блока произведения, затем входные сигналы блока произведения перемножаются.
Сущность изобретения поясняется чертежами, где изображены:
- на фиг.1 - поперечный схематический разрез синхронного реактивного двигателя;
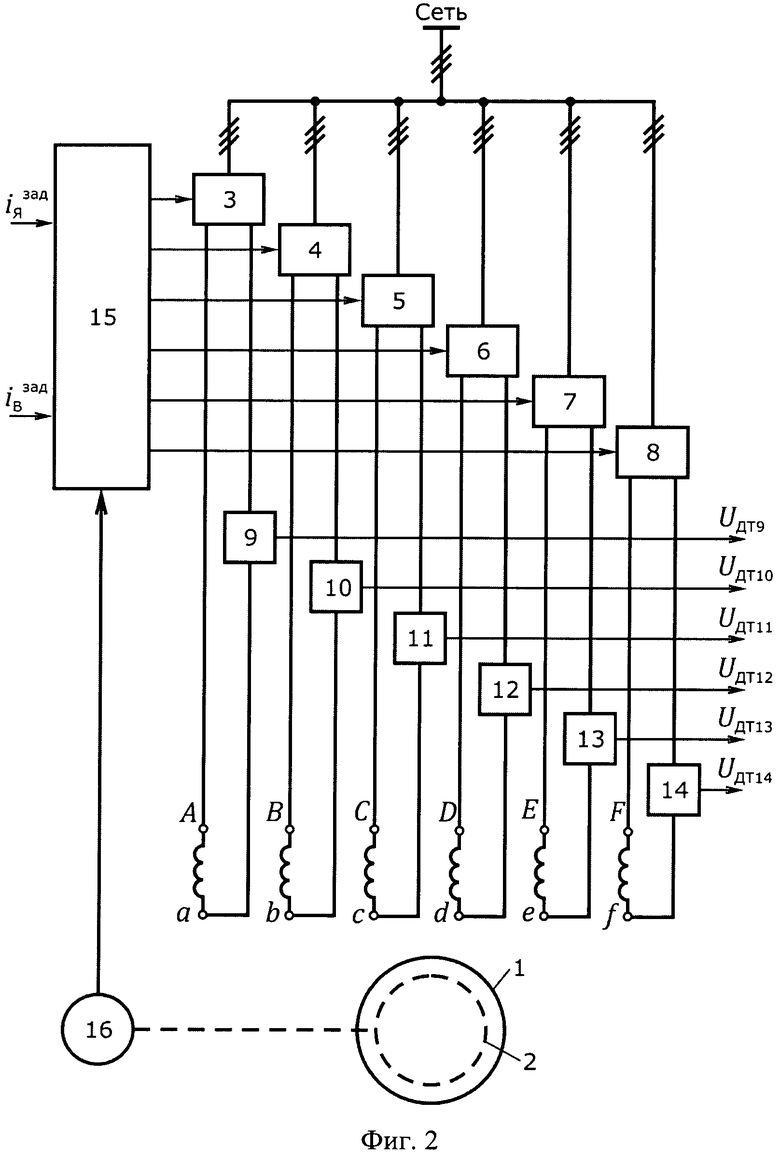
- на фиг.2 - схема функциональная силовых цепей электропривода с синхронным реактивным двигателем;
- на фиг.3 - диаграмма переключения каналов на входах источников фазных токов;
- на фиг.4 - мгновенные пространственные угловые положения ротора и направления токов в фазных обмотках статора двигателя при вращении вала ротора;
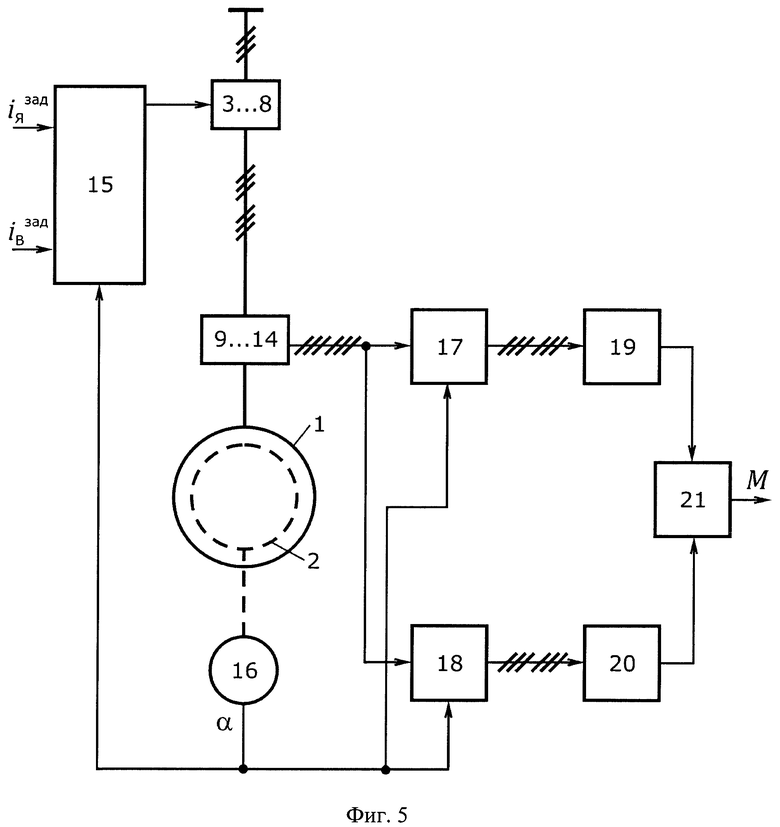
- на фиг.5 - схема функциональная электропривода с устройством измерения электромагнитного момента;
- на фиг.6 - диаграммы включения сигналов, пропорциональных якорной составляющей (а) и составляющей возбуждения (б) тока статора;
- на фиг.7 - схема функциональная электропривода, включающая в себя дополнительное устройство, позволяющее учесть нелинейность кривой намагничивания электрической машины;
На фиг.1. в качестве примера схематически представлен в разрезе шестифазный синхронный реактивный двигатель. В пазах его статора 1 равномерно вдоль окружности внутренней расточки расположены обмотки с полным шагом A-a, B-b, C-c, D-d, E-e, F-f Фазная зона каждой обмотки занимает пространственный угол, равный 30°.
Ротор 2 синхронного реактивного двигателя выполнен явнополюсным и обмоток не содержит. В примере (фиг.1) длины полюсной дуги и межполюсного промежутка равны и составляют 90 электрических градуса.
На фиг.2 представлена функциональная схема силовых цепей электропривода с синхронным реактивным двигателем. Здесь каждая из шести фазных обмоток статора A-a, B-b, C-c, D-d, E-e и F-f питается от индивидуального регулируемого источника тока 3, 4, 5, 6, 7 и 8, подключенного к сети нерегулируемого напряжения. Последовательно с каждой из обмоток статора включены датчики тока 9, 10, 11, 12, 13 и 14. Выходные напряжения датчиков тока обозначены на схеме соответственно UДТ9, UДТ10, UДТ11, UДТ12, UДТ13, UДТ14.
На управляющие входы источников тока 3, 4, 5, 6, 7, 8 подключены шесть выходов коммутатора 15. На первый управляющий вход коммутатора 15 подается сигнал 

На фиг.3 приведена диаграмма переключения каналов в коммутаторе 15, которая показывает, как с помощью датчика 16 углового положения ротора 2 производят переключение сигналов задания токов 






На фиг.4 показано, как с помощью системы управления изменяют направления токов в обмотках статора двигателя при вращении ротора.
На фиг.5 приведена функциональная схема электропривода с устройством измерения электромагнитного момента. Силовые цепи электропривода, которые развернуто изображены на фиг.2, здесь представлены в однолинейном изображении: источники тока 3…8, датчики тока 9…14, статор 1 двигателя с его шестью фазными обмотками, датчик положения 16 ротора двигателя и коммутатор 15.
Подсоединение элементов, входящих в устройство измерения электромагнитного момента, осуществляется следующим образом. Шесть выходов UДТ9, UДТ10, UДТ11, UДТ12, UДТ13, UДТ14 датчиков тока 9…14 подключены к первым шести входам коммутатора 17 и к первым шести входам коммутатора 18. На седьмой вход коммутатора 17 и на седьмой вход коммутатора 18 подается сигнал с выхода датчика положения 16 ротора 2 двигателя. Шесть выходов коммутатора 17 подключены к шести входам сумматора 19, а шесть выходов коммутатора 18 - к шести входам сумматора 20. Выход сумматора 19 подключен к первому входу блока произведения 21, а выход сумматора 20 - ко второму входу блока произведения 21. Выходной сигнал блока произведения 21 соответствует величине электромагнитного момента М.
На фиг.6 приведены диаграммы, которые указывают, при каких углах поворота вала ротора 2 двигателя необходимо пропускать сигналы с выходов датчиков тока 9…14 ко входам сумматоров 19 и 20 через коммутаторы 17 и 18. Логика работы коммутаторов 17 и 18 исходит из следующего требования: по тем фазным обмоткам статора, витки которых находятся в данный момент напротив полюсов, должны протекать токи, соответствующие сигналу 
В исходном положении ротора 2 (см. фиг.1) обмотки статора D-d, E-e, F-f находятся напротив межполюсного промежутка и, следовательно, создают магнитодвижущую силу, направленную вдоль продольной оси ротора 2, т.е. выполняют роль обмоток возбуждения двигателя. Обмотки A-a, B-b, C-c работают как обмотки якоря и создают вращающий момент.
В исходном положении электропривода элементы схемы, входящие в устройство для измерения электромагнитного момента, находятся в следующем состоянии. Датчики тока 9…14, включенные последовательно в цепи фазных обмоток статора, выдают на своих выходных клеммах сигналы UДТ9…UДТ14, которые поступают на входы коммутаторов 17 и 18. При этом в соответствии с диаграммами (фиг.6) коммутатор 17 пропускает далее только сигналы датчиков тока 9, 10 и 11, которые измеряют токи в обмотках A-a, B-b, C-c, расположенных над полюсами ротора 2. Коммутатор 18 в исходном положении ротора 2, наоборот, пропускает только сигналы с датчиков тока 12, 13 и 14, которые измеряют токи в обмотках D-d, E-e, F-f, расположенных над межполюсными промежутками. Переключение каналов в коммутаторах 17 и 18 производится в функции угла поворота вала ротора 2 с помощью датчика 16 положения ротора 2. Сигналы, которые проходят через коммутаторы 17 и 18, складываются в сумматорах 19 и 20. В результате на выходе сумматора 19 сигнал равен:
U19=UДТ9+UДТ10+UДТ11,
т.е. пропорционален сумме фазных токов, которые создают момент. На выходе сумматора 20 сигнал другой:
U20=UДТ12+UДТ13+UДТ14,
т.е. пропорционален сумме фазных токов, которые создают поток возбуждения электродвигателя.
На выходе блока произведения 21 получается сигнал, пропорциональный произведению суммы токов возбуждения на сумму якорных токов, т.е. электромагнитному моменту, который развивает двигатель в исходном положении ротора 2.
Электропривод работает следующим образом.
Так как электродвигатель развивает момент, то ротор 2 приходит во вращение против часовой стрелки. Когда ротор 2 двигателя повернется из исходного положения (см. фиг.1) на угол 30°, то в соответствии с диаграммой (см. фиг.3) датчик положения 16 ротора, во-первых, переключит сигнал задания тока якоря в обмотке F-f на противоположный (т.е. «


Осуществляя таким образом через каждые 30 градусов переключения токов в фазных обмотках статора, обеспечивают пространственное круговое движение МДС статора вдоль окружности воздушного зазора двигателя так, что эта МДС перемещается синхронно с вращающимся ротором двигателя (см. фиг.4). Непрерывность же вращающего момента двигателя обеспечивается тем, что всегда три обмотки статора, расположенные над межполюсным промежутком ротора 2, создают поток, а другие три обмотки, расположенные над полюсами ротора, - электромагнитный момент.
В том случае, когда необходимо изменить на противоположный знак электромагнитного момента и направление вращения ротора 2, следует изменить на противоположный или знак только сигнала «

Устройство измерения электромагнитного момента работает следующим образом. Сначала датчиками тока 9…14 измеряют мгновенные значения фазных токов в обмотках статора двигателя. Затем выходные напряжения этих датчиков попадают на управляющие входы коммутаторов 17 и 18. В соответствии с диаграммой (см. фиг.6а) через коммутатор 17 пройдут следующие сигналы с датчиков тока: в исходном положении ротора 2 (см. фиг.1) - «+UДТ9», «+UДТ10» и «+UДТ11», а при повороте ротора 2 на 30 градусов против часовой стрелки - «+UДТ9», «+UДТ10» и «-UДТ9». Тем самым, над верхним полюсом ротора 2 двигателя во всех трех проводниках токи будут направлены «к нам», а измеритель момента это изменение направления токов в обмотках статора A-a, B-b и C-c автоматически учтет. Одновременно в соответствии с диаграммой (см. фиг.6б) через коммутатор 18 пройдут сигналы с выходов других датчиков тока: в исходном положении ротора 2 (см. фиг.1) - «+UДТ12», «+UДТ13» и «+UДТ14», а при повороте ротора 2 на 30 градусов против часовой стрелки - «+UДТ11», «+UДТ12» и «+UДТ13», т.е. относительное направление токов возбуждения (правый межполюсный промежуток ротора) сохранится.
Благодаря выбранному в соответствии с диаграммой (фиг.6а, б) алгоритму переключения сигналов UДТ9…UДТ14 с выходов датчиков тока 9…14 при вращении ротора 2 двигателя против часовой стрелки (как это представлено на фиг.4) через коммутатор 17 проходят сигналы с выходов тех датчиков тока, которые измеряют токи в проводниках, расположенных над полюсом ротора 2. И наоборот, через коммутатор 18 проходят сигналы только тех датчиков тока, которые в данный момент измеряют токи в проводниках, расположенных над межполюсным промежутком.
Сигналы с датчиков тока, проходящие через коммутатор 17, поступают на входы сумматора 19, где производится их суммирование, после чего эта сумма подается на первый вход блока произведения 21. Аналогично сигналы с датчиков тока, прошедшие через коммутатор 18 и просуммированные в сумматоре 20, подаются на второй вход блока произведения 21. Сигнал на выходе блока произведения 21 получается как результат перемножения, во-первых, суммы токов в проводниках, лежащих напротив межполюсного промежутка ротора 2 и, следовательно, создающих магнитный поток в электрической машине, а во-вторых, - токов в других проводниках, лежащих напротив полюсов ротора 2, пересекающих магнитный поток, созданный первой группой проводников, и, следовательно, создающих вращающий момент двигателя.
В тех случаях, когда необходимо учитывать влияние насыщения в магнитной системе двигателя, то между выходом звена 20 и входом звена 21 необходимо включить звено 22 - нелинейный функциональный преобразователь, статическая характеристика которого соответствует кривой намагничивания электрической машины.
Промышленная применимость предлагаемого изобретения
Устройство и способ измерения электромагнитного момента в электроприводе с синхронной реактивной машиной могут быть рекомендованы к применению в регулируемых электроприводах общепромышленных механизмов, а также транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования электропривода насосного агрегата и способ работы системы | 2018 |
|
RU2687175C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2007 |
|
RU2346376C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Электропривод | 1985 |
|
SU1332427A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |




Изобретение относится к области электротехники и может быть использовано в регулируемых электроприводах общепромышленных механизмов и транспортных средств. Технический результат - расширение функциональных возможностей, повышение надежности и точности работы. В устройстве для измерения электромагнитного момента в электроприводе с синхронным реактивным двигателем в цепь каждой фазной обмотки статора включен последовательно датчик тока, выходные клеммы которого подключены к первой группе входных клемм первого коммутатора сигналов и к первой группе входных клемм второго коммутатора сигналов. Датчик положения ротора механически соединен с валом электродвигателя, а его выходные клеммы соединены со второй группой входов первого и второго коммутаторов сигналов. Выходные клеммы коммутаторов соединены с входными клеммами сумматоров, выходные клеммы которых соединены с входными клеммами блока произведения, напряжение на выходе которого соответствует величине электромагнитного момента двигателя. 2 н. и 1 з.п. ф-лы, 7 ил.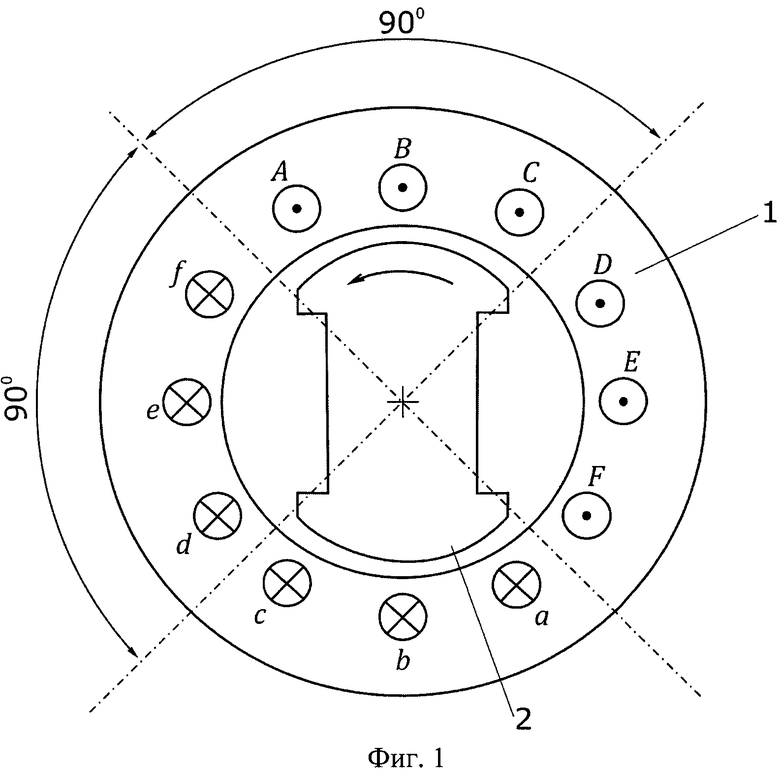
1. Устройство для измерения электромагнитного момента электропривода с синхронным реактивным двигателем, содержащим на статоре m-фазную обмотку с полным шагом, характеризующееся тем, что в цепь каждой фазной обмотки статора включен последовательно датчик тока, выходные клеммы которого подключены к первой группе входных клемм первого коммутатора сигналов, а также к первой группе входных клемм второго коммутатора сигналов, а вторые группы входов первого и второго коммутаторов сигналов подключены к выходным клеммам датчика положения ротора электродвигателя, выходные клеммы первого коммутатора соединены с входными клеммами первого сумматора, а выходные клеммы второго коммутатора соединены с входными клеммами второго сумматора, выходные клеммы первого сумматора соединены с первыми входными клеммами блока произведения, а выходные клеммы второго сумматора соединены со вторыми входными клеммами блока произведения.
2. Устройство по п.1, отличающееся тем, что между выходом второго сумматора и вторым входом блока произведения включен функциональный преобразователь, учитывающий нелинейность кривой намагничивания электрической машины.
3. Способ измерения электромагнитного момента синхронного реактивного двигателя, характеризующийся тем, что по сигналу датчика положения ротора выходные сигналы датчиков токов фазных обмоток статора, витки которых находятся над полюсами, суммируют в первом сумматоре, выходной сигнал которого подают на первый вход блока произведения, а выходные сигналы датчиков токов фазных обмоток статора, витки которых находятся над межполюсными промежутками, суммируют во втором сумматоре, выходной сигнал которого подают на второй вход блока произведения, после чего производят перемножение сигналов на входах блока произведения, при этом результат перемножения соответствует величине электромагнитного момента электрической машины.
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074394C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2408972C1 |
| Способ получения метилового эфира гиодезоксихолевой кислоты | 1959 |
|
SU126226A1 |
| Бесконтактный электропривод постоянного тока | 1978 |
|
SU980223A1 |
| РАСПРЕДЕЛИТЕЛЬНЫЙ ТОПЛИВНЫЙ НАСОС | 0 |
|
SU334395A1 |
| Устройство для измерения электромагнитного момента синхронного электродвигателя | 1976 |
|
SU649971A1 |
| Устройство для контроля величины реактивного момента | 1973 |
|
SU472426A1 |
| JP 54149818 A, 24.11.1979 | |||
| US 61738718 B2, 18.05.2004 | |||
| US 7116077 B2, 03.10.2006 | |||
| Предохранительное устройство шахтного подъемника | 1977 |
|
SU734117A1 |
| WO 1993009595 A1, 13.05.1993 | |||

