Изобретение относится к устройствам для самостоятельного перемещения инвалида и может быть использовано как в больницах, так и в домашних условиях.
Известны устройства для облегчения ухода за инвалидами, которые могут быть использованы в больницах, домах инвалидов или в домашних условиях. Наиболее близким к предлагаемому изобретению являются подъемники М-900000 и М-9000010, подъемник передвижной ПДТБ с электроприводом «Мегамат», подъемник ИПП - 2Э (изготовитель ООО «Фирма ИНВА» www.invaprom.ru - рубрика: медицинская техника). У всех этих подъемников в составе имеется кресло-сумка, которая укладывается на кровать под больного, после чего ремни с карабинами пристегиваются к кольцам-креплениям непосредственно самого подъемника. Недостатком данного устройства является сложность самостоятельного укладывания на кровати и перемещения инвалида в кресло-сумку без посторонней помощи, а также самостоятельного перемещения с кровати на биотуалет, так как устройство не имеет поворотного механизма. Кроме этого, подъемник жестко закреплен на основании, поэтому инвалид самостоятельно может осуществить только подъем собственного тела.
Целью изобретения является максимальное упрощение эксплуатации подъемника и возможность самостоятельного перемещения по радиусу, при пользования биотуалетом или при перемещении в инвалидную коляску.
Указанная цель достигается тем, что данное устройство снабжено автоматическими захватами, опорно-поворотной стойкой (для перемещения по радиусу), и раздвижной крестовиной, которая при помощи фиксируемых ручек может приводиться в транспортное или стационарное положение. Все шарнирно сочлененные элементы механизма подъема и перемещения закрыты эластичным кожухом, на чертеже он условно не показан. Для фиксации подъемника в стационарном положении два ходовых ролика в передней части подъемника снабжены тормозом. В транспортном положении также имеются ограничители, не дающие возможность поворота каретки с захватами за пределы устойчивости во избежание опрокидывания устройства.
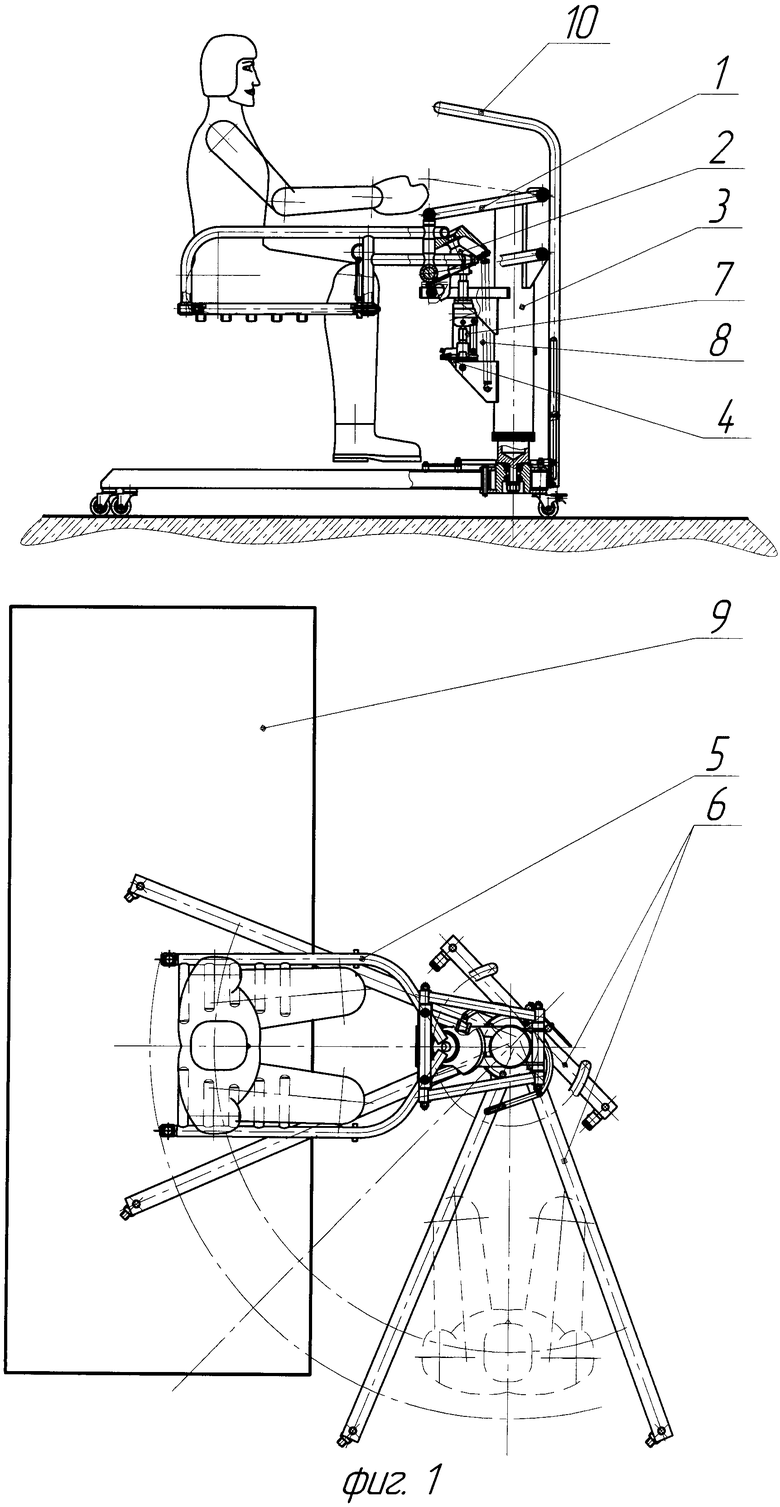
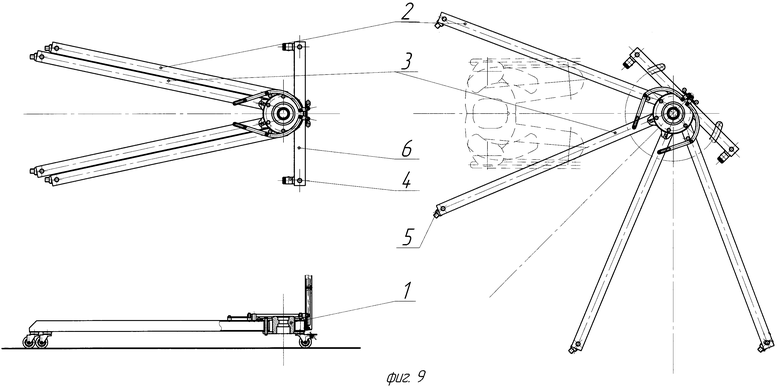
На фиг.1 изображен подъемник для захвата, подъема и перемещения инвалида. Конструкция данного устройства состоит из каретки поз.1, конуса усилий поз.2, стойки поз.3, захвата поз.5, крестовины поз.6. Работа устройства происходит следующим образом. Подъемник разворачивается в стационарное положение фиг.3, 9, 11 и устанавливается возле кровати (дивана), фиксируясь в этом положении роликами с тормозом, см. фиг.9 поз.4. По мере необходимости перемещения инвалид устанавливает захваты в исходное положение фиг.1, 3, после чего, воздействуя на рычаг привода гидродомкрата фиг.1 поз.7, производит захват и подъем тела. Затем, опираясь на поручень, фиг.1 поз.10, перемещает себя по радиусу в место расположения биотуалета или инвалидной коляски. Возвращение в исходное положение производится в обратном порядке. При этом для опускания тела на кровать (диван) необходимо повернуть против часовой стрелки винт блокировки гидрозамка домкрата на 1/4 оборота для плавного спуска и открытия захватов.
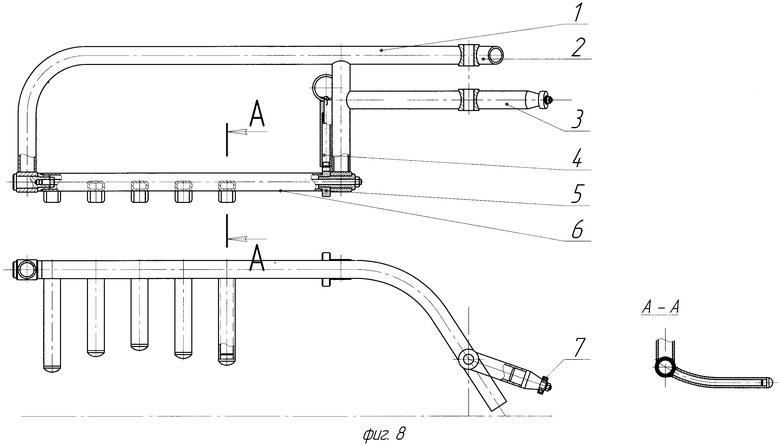
В случае вертикального освобождения (посадка в инвалидную коляску) необходимо опуститься на уровень сидения коляски фиг.2 и, поднимая за кольцо фиксатор, фиг.8 поз.4, вывести шток из зацепления с храповиком поз.5 подвески поз.6. После чего произвести подъем и освобождение захватов подъемника.
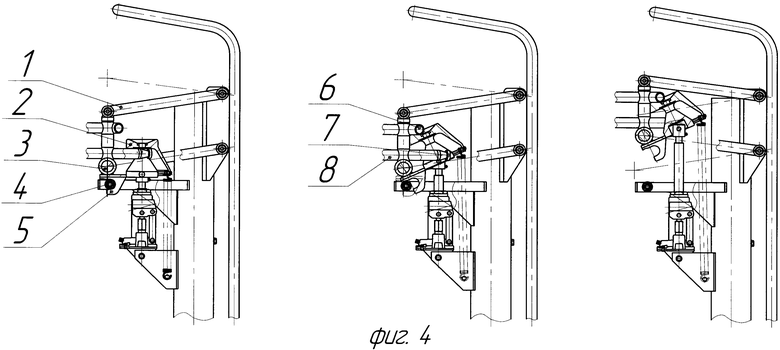
Автоматический режим захвата и подъема, как и освобождение, происходит следующим образом. На фиг.4 при вертикальном воздействии штока гидродомкрата конус усилий поз.2 начинает перемещаться вверх, поворачиваясь относительно оси поз.3, при этом перемещение каретки вверх не происходит, так как крючок конуса поз.5 перекатывается по подшипнику поз.4 стойки и не дает перемещение каретки до полного смыкания захватов. После выхода из зацепления крючка конуса усилий и подшипника стойки головка конуса упирается в опорные консоли захвата поз.6, и все вертикальные усилия передаются на захват, который перемещается вверх в горизонтальном положении под воздействием пантографа каретки. Смыкание и размыкание захвата происходит от воздействия конуса усилий на подшипники захвата поз.7, находящегося на консолях раздвижки фиг.8 поз.3 по внутренней и внешней части (выполненных раздельно по технологическим соображениям) конуса. То есть за счет конуса вертикальное усилие от гидроцилиндра раскладывается на горизонтальное, которое воздействует на захваты, а подшипники захвата поз.7 необходимы для снижения потерь на трение и плавности хода.
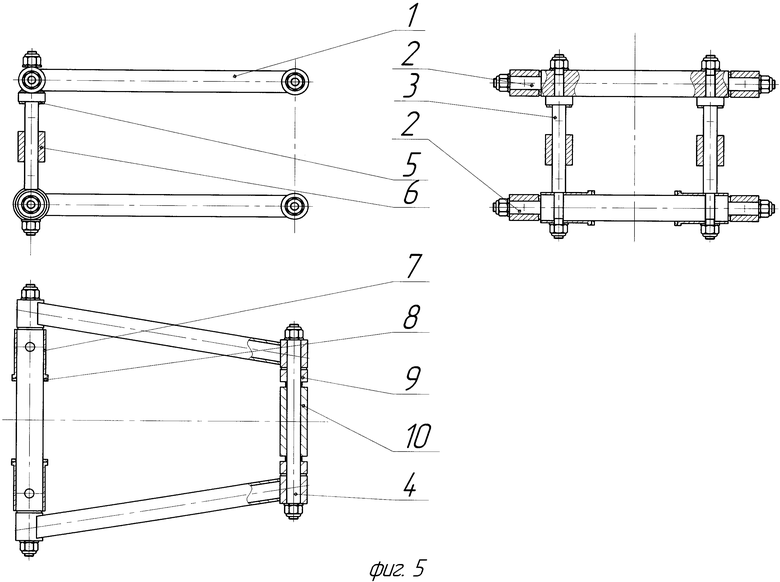
Каретка фиг.5 сварной конструкции изготовлена в виде пантографа из труб прямоугольного сечения поз.1. При виде сверху имеет вид трапеции для придания жесткости от боковых нагрузок.
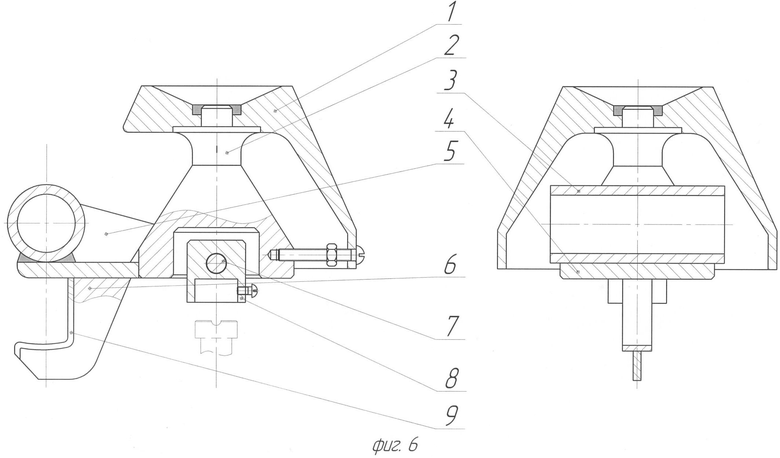
Конус усилия фиг.6 сварной конструкции изготовлен из отдельных элементов по технологическим причинам для простоты изготовления. Верхняя часть изготовлена в виде разрезанного колокола поз.1, а нижняя в виде конуса поз.2.
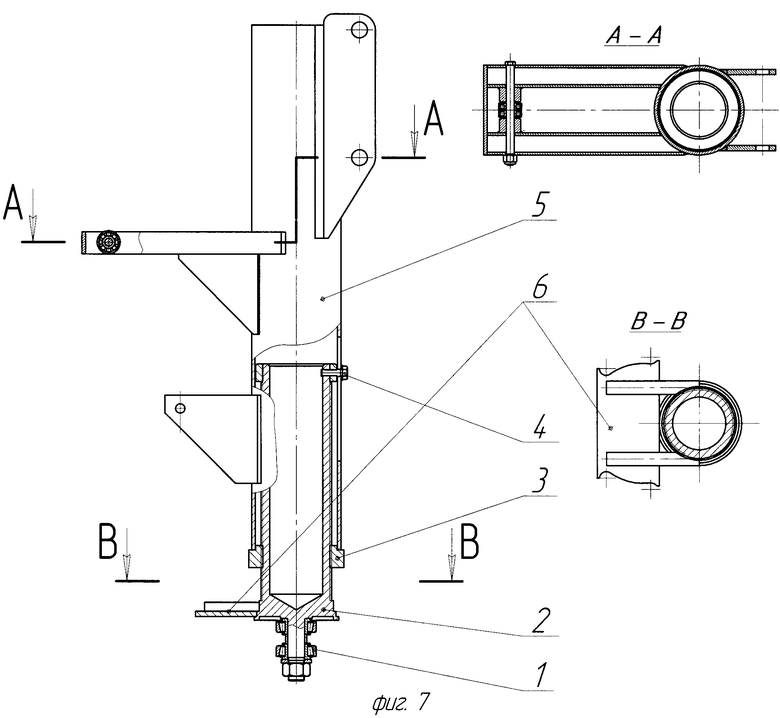
Опорно-поворотная стойка (для перемещения по радиусу) фиг.7 состоит из оси поз.2, двух радиально-упорных подшипников поз.1, корпуса поз.5, где крепится навесное оборудование, а также механизма регулировки заданной высоты расположения захватов по отношению к дивану инвалида. Регулировка происходит за счет выкручивания или закручивания гайки поз.3, при этом вращение корпуса блокирует фиксатор поз.4. Кроме этого, высота подъема больного может регулироваться винтом домкрата. В нижней части оси приварена пластина ограничителя поворота стойки поз.6.
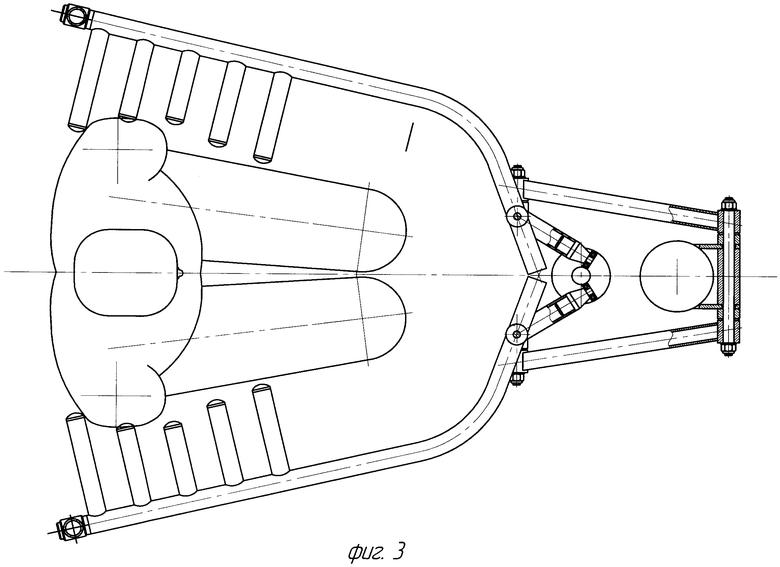
Захваты фиг.8 сварной конструкции, изготовлены из труб круглого сечения поз.1, имеют консоли опорные поз.2 для вертикальных нагрузок и консоли раздвижные для открытия и закрытия захватов. В нижней части установлен подвес поз.6 с элементами подхвата из труб прямоугольного сечения. Подвес фиксируется в горизонтальном положении фиксатором поз.4, который приварен к стойке подлокотника поз.1 и входит в зацепление с храповиком поз.5.
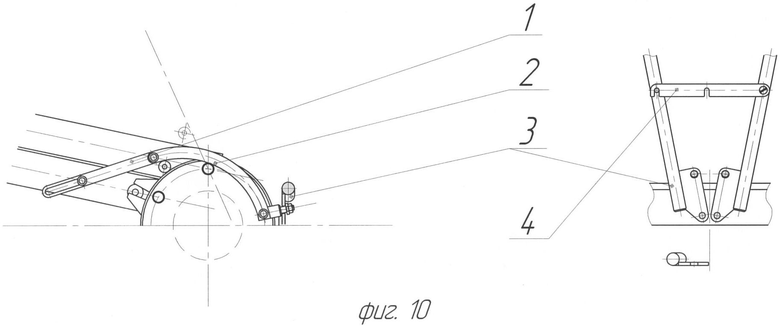
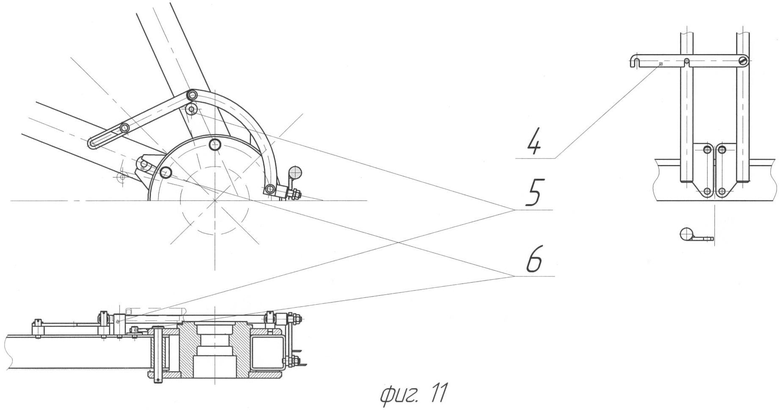
Раздвижная крестовина фиг.9 состоит из корпуса поз.1, одной неподвижной балки поз.6 и четырех раздвижных балок поз.2, 3. На неподвижной балке по концам установлены два ролика с тормозом поз.4, а на раздвижных - ролики без тормоза поз.5. Внутренние и наружные раздвижные балки шарнирно соединены между собой с помощью тяг фиг.10 поз.1, 2, рычагов поз.3 и планки поз.4, которые обеспечивают синхронную раздвижку и фиксацию балок при установке подъемника в транспортное фиг.10 или стационарное фиг.11 положение. Упоры фиг.11 поз.6 обеспечивают строгое положение внутренних раздвижных балок. На наружных раздвижных балках установлены ограничители поворота поз.5 для опорно-поворотной стойки, которые обеспечивают надежную остановку поворота стойки в пределах устойчивости подъемника как в транспортном, так и в стационарном положении. При проектировании передвижного подъемника были учтены технические требования и методы испытаний по ГОСТ Р ИСО 10535-99 «Подъемники бытовые реабилитационные».
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАНДУС (ВАРИАНТЫ) | 2013 |
|
RU2540724C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДОВ | 2015 |
|
RU2606218C1 |
| ПАНДУС РАЗДВИЖНОЙ (ВАРИАНТЫ) | 2013 |
|
RU2536516C2 |
| Устройство, обеспечивающее безопасность инвалидной коляски при подъёме | 2022 |
|
RU2787981C1 |
| Устройство для самостоятельной перегрузки инвалида | 1991 |
|
SU1819596A1 |
| ИНТЕГРИРОВАННЫЙ РЕАБИЛИТАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2713076C1 |
| МЕДИЦИНСКИЙ ПОДЪЁМНИК-ПЕРЕМЕЩАТЕЛЬ ПАЦИЕНТА | 2016 |
|
RU2659516C2 |
| Мускульный движитель | 2022 |
|
RU2802569C1 |
| Многофункциональное кресло-коляска | 2015 |
|
RU2651228C2 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2015 |
|
RU2578800C1 |

Изобретение относится к устройствам для перемещения тяжелобольных и может быть использовано в больницах, домах престарелых и в квартирах.
Подъемник содержит захваты, стойки, раздвижную крестовину, гидродомкрат, опорно-поворотную стойку, каретку, ограничители поворота каретки за пределы устойчивости и два ходовых ролика, которые размещены в передней части подъемника и снабжены тормозом. Захваты выполнены автоматическими. Все шарнирно сочлененные элементы закрыты эластичным кожухом. Раздвижная крестовина выполнена с возможностью приведения в транспортное или стационарное положение при помощи фиксируемых ручек и имеет ограничители поворота стойки. Все операции по перемещению инвалид может выполнить самостоятельно, без чьей-либо помощи при возможности самостоятельно двигать одной рукой или ногой, посредством ручного или ножного управления. В результате у больного появляется возможность самостоятельно обслуживать себя без чьей-либо помощи, что дает уверенность в собственных возможностях и поднимает жизненный тонус больного. 11 ил.
Подъемник передвижной для подъема и перемещения инвалидов, содержащий захваты, стойки и раздвижную крестовину, отличающийся тем, что дополнительно содержит гидродомкрат, опорно-поворотную стойку, каретку, ограничители поворота каретки за пределы устойчивости и два ходовых ролика, которые размещены в передней части подъемника и снабжены тормозом, при этом захваты выполнены автоматическими, все шарнирно сочлененные элементы закрыты эластичным кожухом, а раздвижная крестовина выполнена с возможностью приведения в транспортное или стационарное положение при помощи фиксируемых ручек и имеет ограничители поворота стойки.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПОДЪЕМНИК И МАТРАЦ ДЛЯ ТЯЖЕЛОБОЛЬНЫХ ПАЦИЕНТОВ | 2005 |
|
RU2302851C2 |
| ПОДЪЕМНИК ДЛЯ ТЯЖЕЛОБОЛЬНЫХ | 0 |
|
SU280772A1 |
| КАТАЛКА-ПОДЪЕМНИК ДЛЯ ТЯЖЕЛОБОЛЬНЫХ | 0 |
|
SU197867A1 |
| ФРОСИН В.Н | |||
| и др | |||
| Больничное оборудование | |||
| - М.: Медицина, 1982, с.100, рис.28. | |||

