Изобретение относится к подводной технике, а именно к подводным поисковым буксируемым системам.
Известно много двухзвенных буксируемых систем, например "Буксируемая подводная поисковая система" по авторскому свидетельству №1216914, МКИ B63B 21/66, содержащая заглубитель, связанный кабель-тросом с судном-носителем и подводный поисковый аппарат, соединенный с заглубителем промежуточным кабель-тросом.
Общим недостатком этой и подобных ей систем является сложность процесса спуска и подъема из-за наличия двух буксируемых подводных объектов - заглубителя и поискового аппарата.
Наиболее близкой по технической сущности к заявляемому изобретению и взятой в качестве прототипа является также "Подводная буксируемая поисковая система" по авторскому свидетельству №701042, МКИ B63B 21/00, содержащая судно-буксировщик, буксирный кабель-трос с заглубителем, промежуточный облегченный кабель и легкий подводный поисковый аппарат с приборами и хвостовыми движителями, расположенными в вертикальной и горизонтальной плоскостях.
Основным недостатком этого прототипа является сложность спуско-подъемных операций из-за наличия двух буксируемых объектов (звеньев) - заглубителя и поискового аппарата.
Решаемой технической задачей предполагаемого изобретения является устранение указанных недостатков, а именно: создание высокоэффективной подводной буксируемой поисковой системы, позволяющей упростить ее эксплуатацию.
Поставленная задача достигается тем, что в подводной буксируемой поисковой системе, содержащей судно-буксировщик, буксирный кабель-трос, тяжелый носитель-заглубитель, закрепленный на ходовом конце кабель-троса, и легкий носитель аппаратуры, связанный с заглубителем облегченным кабель-тросом и имеющий в своем составе подруливающие движители, заглубитель оснащен лебедкой и в его конструкции выполнена открытая со стороны кормовой оконечности ниша, размеры и конфигурация которой согласованы с внешними формами легкого носителя, кроме того, над упомянутой нишей выполнена продольная направляющая, на которой установлена подвижная, подпружиненная в сторону кормы заглубителя каретка, имеющая фильеру для пропускания облегченного кабель-троса, коренной конец которого запасован через направляющий ролл и закреплен на барабане лебедки, кроме того, легкий носитель оснащен вертикальным реверсивным подруливающим движителем с системой автоматического управления, расположенным в кормовой оконечности легкого носителя.
Изобретение поясняется чертежами:
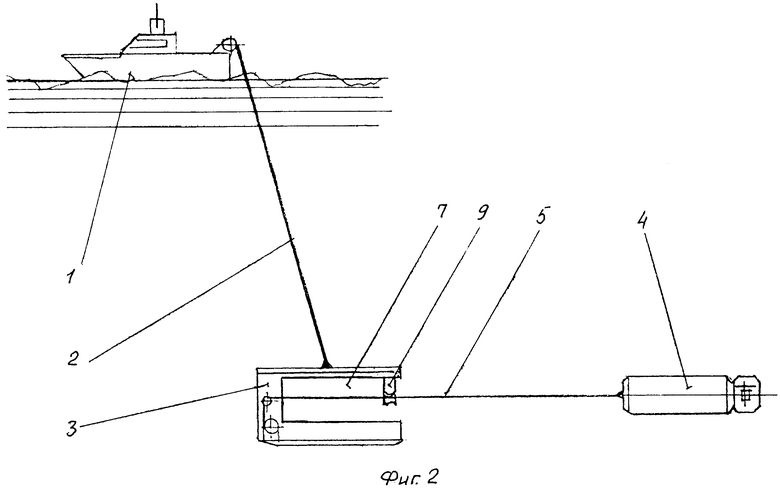
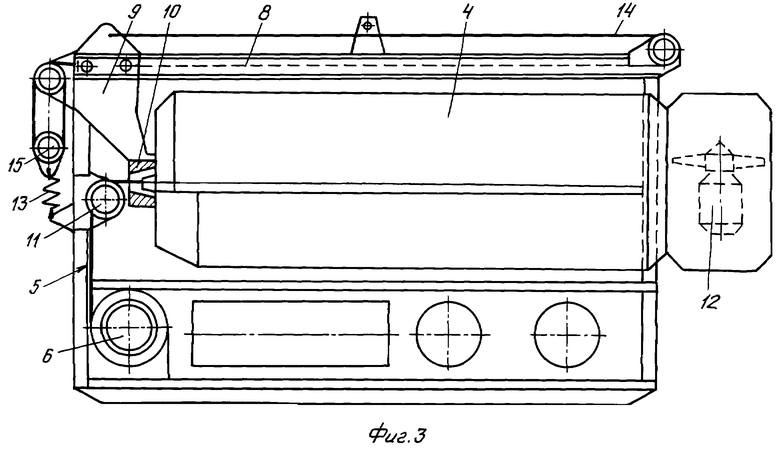
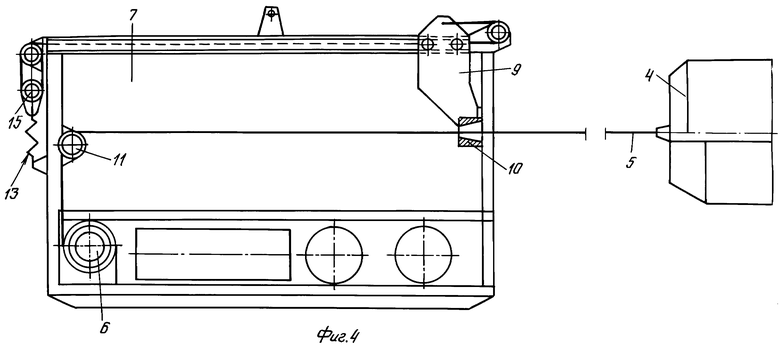
На фиг.1 изображена подводная буксируемая поисковая система на режиме спуска-подъема; на фиг.2 изображена подводная буксируемая поисковая система на режиме буксировки; на фиг.3 показан тяжелый носитель-заглубитель в конфигурации спуска-подъема (легкий носитель втянут в нишу заглубителя); на фиг.4 показан тяжелый носитель-заглубитель в конфигурации буксировки (легкий носитель выведен из ниши заглубителя), где:
1 - судно буксировщик;
2 - буксирный кабель-трос;
3 - тяжелый носитель-заглубитель;
4 - легкий носитель аппаратуры;
5 - облегченный кабель-трос;
6 - лебедка;
7 - ниша;
8 - продольная направляющая;
9 - каретка;
10 - фильера;
11 - направляющий ролл;
12 - подруливающий движитель;
13 - пружина;
14 - трос;
15 - полиспаст.
Подводная буксируемая поисковая система содержит судно-буксировщик 1, буксирный кабель-трос 2, тяжелый носитель-заглубитель 3, закрепленный на ходовом конце кабель-троса 2, и легкий носитель аппаратуры 4, связанный с заглубителем 3 облегченным кабель-тросом 5. Тяжелый носитель-заглубитель 3 оснащен лебедкой 6 и в его конструкции выполнена открытая со стороны кормовой оконечности ниша 7, размеры и конфигурация которой согласованы с внешними формами легкого носителя 4, кроме того, над упомянутой нишей выполнена продольная направляющая 8, на которой установлена подвижная, подпружиненная в сторону кормы заглубителя каретка 9, имеющая фильеру 10, сквозь которую пропущен облегченный кабель-трос 5, коренной конец которого запасован через направляющий ролл 11 и закреплен на барабане лебедки 6, кроме того, легкий носитель 4 оснащен вертикальным реверсивным подруливающим движителем 12 с системой автоматического управления, расположенным в кормовой оконечности легкого носителя 4.
В данном случае конкретного исполнения подпружинивание каретки осуществляется с помощью, например, пружины растяжения 13, связанной с кареткой 9 тросом 14, запасованным через полиспаст 15.
Работает данная подводная буксируемая поисковая система следующим образом:
Перед спуском с судна 1 легкий носитель 4 находится (заранее помещается) внутри ниши 7, облегченный кабель-трос 5 намотан на барабан лебедки 6. Трос 14 натянут пружиной 13, каретка 9 находится в крайнем переднем положении. В такой конфигурации система выводится за борт судна 1 и опускается за счет стравливания кабель-троса 2 на заданную глубину. Спуск производится преимущественно в режиме дрейфа или на самом малом ходу судна. По достижении заданной глубины легкий носитель 4 выводится из ниши 7. Для этого судну дается ход - лебедка 6 включается на выдачу облегченного кабель-троса 5 и каретка 9 за счет усилия пружины 13, действующей через полиспаст 15 и трос 14, перемещается в направлении кормы заглубителя 3 и, упираясь в нос легкого носителя 4, выталкивает его из ниши 7. Выводу легкого носителя из ниши способствует и сила гидродинамического сопротивления легкого носителя. Дойдя до заднего упора, каретка 9 останавливается, облегченный кабель-трос 5 выдается лебедкой 6 на заданную длину. Затем лебедка стопорится и производится буксировка системы в конфигурации, изображенной на фиг.2 (двухзвенная система). Перед подъемом с глубины буксируемая система снова превращается в однозвенную, для чего легкий носитель 4 втягивается в нишу 7 заглубителя 3. При этом лебедка 6 включается на выборку кабель-троса 5 и носитель 4 подтягивается к заглубителю 3 до упора в каретку 9. Продолжая подматывать облегченный кабель-трос на барабан лебедки 6, втягивают носитель 4 в нишу 7 заглубителя. При этом носитель 4 толкает носом каретку 9 и, преодолевая усилие пружины 13, продвигает каретку 9 перед собой до упора, после чего лебедка 6 выключается. Момент упора каретки и выключения лебедки определяется, например, по срабатыванию конечного выключателя (на чертежах не показан).
При буксировке системы в условиях волнения моря заглубитель, будучи подвешен на ходовом конце кабель-троса 2, совершает вертикальные и угловые колебания, что затрудняет втягивание легкого носителя 4 в нишу 7. Колебания заглубителя происходят, в основном, в продольной вертикальной плоскости. В данном устройстве носитель 4 при подтягивании его до упора в каретку 9 оказывается связанным с заглубителем в точке контакта с фильерой 10 и вертикальные перемещения заглубителя 3 и носителя 4 становятся связанными. Остается согласовать их движение по углу дифферента. Для этой цели в кормовой части легкого носителя 4 установлено реверсивное подруливающее устройство с системой автоматического управления 12, за счет работы которого осуществляется регулирование угла дифферента носителя 4 и, тем самым, согласование углов дифферента заглубителя и легкого носителя в процессе втягивания последнего в нишу 7 заглубителя 3.
По сравнению с известными аналогами данное изобретение «Подводная буксируемая поисковая система» за счет конструктивной возможности интегрирования на этапах спуска и подъема двух буксируемых объектов в один позволяет упростить эксплуатацию системы, тем самым, получая эту систему высокоэффективной в эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Спускоподъёмное устройство безэкипажного катера для необитаемого подводного аппарата | 2020 |
|
RU2757036C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| Комплекс аварийной эвакуации на лёд персонала и экипажа морских платформ | 2019 |
|
RU2720757C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО БУКСИРУЕМОЙ ЛИНИИ | 2007 |
|
RU2339536C1 |
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| СПОСОБ БУКСИРОВКИ ПОДВОДНОЙ ЛОДКИ | 2015 |
|
RU2619885C2 |
Изобретение относится к подводной технике, а именно к подводным поисковым буксируемым системам. Подводная буксируемая поисковая система содержит судно-буксировщик 1, буксирный кабель-трос 2, тяжелый носитель-заглубитель 3, закрепленный на ходовом конце кабель-троса 2, легкий носитель аппаратуры 4, связанный с заглубителем 3 облегченным кабель-тросом 5, имеющий подруливающие движители 12. Заглубитель 3 оснащен лебедкой, в котором выполнена открытая со стороны кормовой оконечности ниша 7, размеры и конфигурация которой согласованы с внешними формами легкого носителя 4. Над нишей 7 выполнена продольная направляющая 8, на которой установлена подвижная, подпружиненная в сторону кормы заглубителя 3 каретка 9, имеющая фильеру 10, сквозь которую пропущен облегченный кабель-трос 5. Коренной конец кабель-троса запасован через направляющий ролл 11 и закреплен на барабане лебедки 6. Легкий носитель 4 оснащен вертикальным реверсивным подруливающим движителем 12 с системой автоматического управления, расположенным в кормовой оконечности легкого носителя 4. Упрощается эксплуатация системы, повышается ее эффективность. 1 з.п. ф-лы, 4 ил.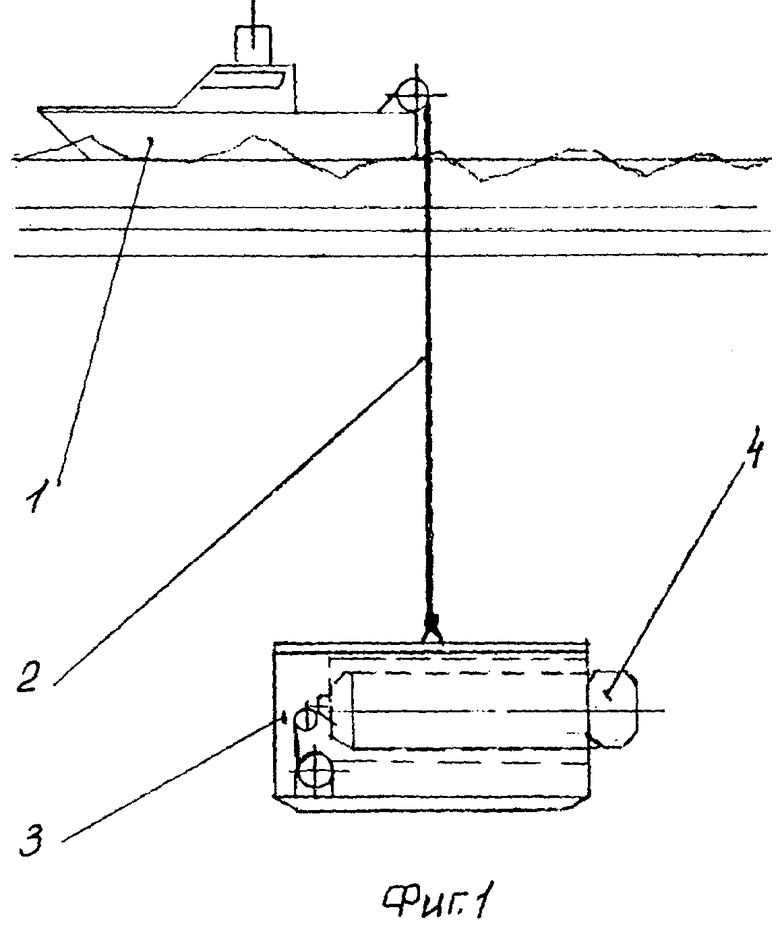
1. Подводная буксируемая поисковая система, содержащая судно-буксировщик, буксирный кабель-трос, тяжелый носитель-заглубитель, закрепленный на ходовом конце кабель-троса, и легкий носитель аппаратуры, связанный с заглубителем облегченным кабель-тросом и имеющий в своем составе подруливающие движители, отличающаяся тем, что заглубитель оснащен лебедкой и в его конструкции выполнена открытая со стороны кормовой оконечности ниша, размеры и конфигурация которой согласованы с внешними формами легкого носителя, кроме того, над упомянутой нишей выполнена продольная направляющая, на которой установлена подвижная, подпружиненная в сторону кормы заглубителя каретка, имеющая фильеру для пропускания облегченного кабель-троса, коренной конец которого запасован через направляющий ролл и закреплен на барабане лебедки.
2. Подводная поисковая буксируемая система по п.1, отличающаяся тем, что легкий носитель оснащен вертикальным реверсивным подруливающим движителем с системой автоматического управления, расположенным в кормовой оконечности легкого носителя.
| SU 1396462 A1, 10.11.1996 | |||
| SU 1249837 A1, 10.11.1996 | |||
| US 6883453 B1, 26.04.2005 | |||
| US 4262621 A, 21.04.1981. |

