Изобретение относится к области производства подводных работ с использованием буксируемых подводных аппаратов (БПА), преимущественно оснащенных гидроакустической измерительной аппаратурой, и предназначено для обследования морских магистральных трубопроводов и может быть использовано для. поиска и обнаружения других подводных объектов.
Известно устройство, представляющее собой буксируемый подводный аппарат (В.А.Воронин, С.П.Тарасов, В.И.Тимощенко. Гидроакустические параметрические системы. Ростов-на-Дону. ООО Ростиздат. 2004, с.257. [1]), выполненный в виде полого цилиндрического тела со съемной головкой и хвостовыми частями и оснащенный носовой и кормовой телекамерами, гидролокатором бокового обзора с дальностью действия 100 м и параметрическим профилографом с цветным индикатором и вычислительно-управляющим модулем. Размеры БПА составляют: длина 1300 мм, диаметр 210 мм. Ввод сигнальных жил кабель-троса выполнен в головной части, кабельные вводы для приемных и излучающих антенн выполнены рядом с антеннами, все они герметичны и рассчитаны на погружение до глубины 100 м. На боковых частях буксируемого тела выполнены установочные площадки для четырех преобразователей накачки, на специальных бандажах крепятся четыре приемные антенны. Размещение четырех антенн позволяет производить зондирование в горизонтальной и вертикальной плоскостях, а также дает возможность с помощью наклоненной под углом 20 градусов антенны получать панорамное изображение рельефа дна.
Уменьшение рысканий и дифферента решается с помощью хвостового стабилизатора, выполненного в виде широкополосного обода, соединенного с хвостовой частью цилиндрического корпуса пластинчатыми спицами.
Стабилизация по крену (вращательное движение вокруг продольной оси) достигается за счет смещения центра тяжести буксируемого тела.
Необходимое заглубление буксируемого тела при минимальной вытравке кабель-троса осуществляется путем использования заглубительной решетки, что позволяет осуществлять отведение всей буксируемой системы в сторону от судна-носителя.
Ввиду того, что на БПА используют излучатели с узкими характеристиками направленности, то нейтрализация крена и рысканий БПА является определяющим фактором, при выполнении установленных требований, при решении таких задач, как обнаружение и контроль заиленного трубопровода, измерение толщины ила над ним, определение структуры донных слоев, оценка характеристик морского донного грунта, а также при проведении различных поисковых работ на подводных морских сооружениях, включая съемку рельефа дна.
БПА, как правило, используются для океанографических исследований в районах с особо сложными физико-географическими условиями (прикромочные районы Арктики, во фронтальных зонах и вокруг айсбергов). Указанные районы отличаются тем, что в них образуются температурно-соленостные неоднородности и вихри различных масштабов, оказывающие значительное влияние на распределение скорости в месте проведения исследований.
При этом измерения должны производиться непрерывно и при этом, при выявлении неоднородностей, расстояния между разрезами не должно превышать половины минимального диаметра неоднородностей, а частота измерения на разрезах не должна быть меньше 1/8-1/10 диаметра неоднородности (см., например: А.Т.Щвецов. Использование автономных самоходных и буксируемых измерительных комплексов для исследования неоднородностей океанографических полей // Записки по гидрографии. Л., ГУНиО МО РФ, №253, 2001, с.48).
БПА - как техническое средство для проведения гидрологических работ - представляет собой динамическую систему, имеющую шесть степеней свободы: три степени свободы по линейным перемещениям, характеризующим траекторию движения БПА по курсу, скорости и глубине погружения, три степени свободы по угловым перемещениям БПА по дифференту, рысканию и крену.
В существующих способах проведения гидрологических работ (съемка рельефа дна, поиск затонувших объектов, мониторинг трубопроводов и т.д.) точность определения параметров посредством, установленных на БПА гидроакустических средств, в основном оценивается по точности определения места судна-носителя и БПА.
Однако при детальной съемке, точность привязки исследуемых подводных элементов к координатам в значительной степени определяется положением на дне пятна, освещаемого гидроакустическим средством, положение этого пятна, в свою очередь, зависит от ориентации и глубины погружения БПА (см., например: В.Н.Завгородний. О влиянии погрешностей ориентации и глубины погружения буксируемого подводного аппарата на точность съемки рельефа дна // Записки по гидрографии. Л., ГУНиОМОРФ, №253, 2001, с.33).
Качество гидроакустических зондирований подводных объектов в первую очередь зависит от точности стабилизации положения аппарата по глубине, рысканию, дифференту и крену.
Требования к точности стабилизации аппарата при его буксировке, как правило, определяются шириной характеристики направленности гидроакустического средства в горизонтальной и вертикальной плоскостях.
При этом глубина погружения регулируется длинной кабель-троса, а стабилизация ориентации по дифференту и рысканию определяется обводами корпуса БПА, местом крепления кабель-троса к корпусу аппарата, фиксированным положением рулей. Кроме того, траектория движения БПА по глубине и ориентация по рысканию и дифференту зависят от скорости буксировки, подводных течений и воздействия волнения моря на судно-буксировщик.
Как показывает, выполненный анализ погрешностей съемки дна с использованием гидроакустических средств, установленных на БПА, наибольший вклад в радиальную погрешность вносят погрешности съемки рельефа из-за рыскания, крена и дифферента БПА. Немало важным фактором является и производительность съемки рельефа дна. Производительность съемки рельефа дна зависит от скорости буксируемого БПА и ширины обследуемой полосы рельефа дна. При увеличении полосы съемки рельефа дна точность съемки ухудшается, что требует повышения кратности зондирования рельефа дна посылками импульсов и, следовательно, ведет к уменьшению скорости буксировки. Скорость буксировки БПА также оказывает противоречивое влияние на качество съемки. При увеличении скорости точность улучшается из-за лучшей стабилизации ориентации и глубины БПА, а кратность зондирования рельефа дна гидроакустическим средством для повышения точности уменьшается, т.е. имеет место задача оптимизации выбора скорости буксировки и ширины полосы, обследуемой гидроакустическим средством.
В известных устройствах стабилизации (Авторское свидетельство СССР №1308040 [2]; Авторское свидетельство СССР №1360405 [3]) устойчивость движения и ориентации, применительно к надводным судам, достигается за счет использования следящих систем положения рулей как регуляторов с обратной связью для удержания заданного положения судном. Однако известные системы стабилизации [2, 3] имеют сложную конструкцию и существенные массогабаритные характеристики, что практически исключает их применение на БПА, имеющих небольшие массогабаритные характеристики.
Также известно, что все буксируемые средства подвержены рысканию (см., например: Аносов А.В., Дидык А.Д. Управление судном и его техническая эксплуатация. М.: Транспорт, 1976, 504 с.; Знамеровский Б.П. Теоретические основы управления судном. Л.: ЛВИМУ, 1974, с.124), и полностью исключить влияния рыскания при их буксировке при использовании известных конструкций буксируемых подводных аппаратов, практически невозможно, что не позволяет выполнять буксировку при скорости движения более 3-х узлов из-за наличия в их конструкции заглубительной решетки.
Кроме того, возникают технические проблемы при поиске лежащих под слоем донного ила объектов и трубопроводов. Гидроакустический поиск в таких условиях сопровождается большим количеством ложных тревог. При малой толщине ила над заиленным трубопроводом необходимо использование только высоконаправленных систем для получения высокого разрешения. Одновременно система должна быть низкочастотной для хорошего проникновения сигнала в толщу донных осадков. Проблема контроля трубопроводов возникает, как правило, на мелководье, что требует ограниченных габаритов антенн. В известных конструкциях, с учетом сравнительно небольших размеров заиленных объектов и труб, используют сканирование узкого параметрического луча, что усложняет систему управления подводным буксируемым аппаратом.
Задачей заявляемого технического решения является повышение достоверности обнаружения подводных объектов и трубопроводов при гидроакустическом поиске за счет повышения точности ориентации буксируемого подводного аппарата путем уменьшения влияния рыскания, дифферента и сноса буксируемого аппарата под действием подводных течений.
Поставленная задача решается за счет того, что буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов, и выполненный в виде полого цилиндрического корпуса со съемной головкой и хвостовым стабилизатором, снабженный заглубляющим устройством и оснащенным параметрическим профилографом, вычислительно-управляющим модулем, и соединенный с судном-буксировщиком кабель-тросом, в котором стабилизатор состоит из двух плоскостей, образующих Х-образную конструкцию, заглубляющее устройство выполнено в виде горизонтального крыла и двух вертикальных крыльев, при этом вертикальные крылья установлены на полуосях, расположенных в поперечной плоскости относительно цилиндрического корпуса, и снабжены поворотным механизмом, вертикальные крылья расположены симметрично относительно друг друга, на верхней плоскости цилиндрического корпуса, на горизонтальном крыле установлен буксировочный узел, с герметичным разъемом для крепления кабель-троса и ввода кабеля в буксируемый подводный аппарат, кабель-трос снабжен гидродинамическим заглубителем, выполненным в виде гидродинамического заглубителя, снабженного системой с радиально направленными подпружиненными механическими датчиками, имеющими на концах колеса, в носовой части цилиндрический корпус сочленен с трубчатой скобообразной рамой, концы которой сочленены с соответствующими Х-образными плоскостями стабилизатора, в нижней части цилиндрический корпус снабжен нишей, в которой установлен крейт с закрепленными на нем элементами параметрического профилографа, ниша снабжена обтекателем, выполненным из сферопластика, буксируемый подводный аппарат дополнительно снабжен системой ориентации и навигации, состоящей из бесплатформенной инерциальной системы, информационно соединенного с бортовой аппаратурой управления судна-буксировщика и вычислительно-управляющего модуля буксируемого подводного аппарата, а в параметрическом профилографе, включающем излучающую параметрическую антенну накачки и приемную антенну, средства обработки и регистрации гидроакустических сигналов, излучающая параметрическая антенна накачки и приемная антенна выполнены в виде отдельных устройств, при этом излучающая параметрическая антенна, содержащая фазированную решетку и каналы усиления, выполнена с 12 каналами усиления, фазированная решетка выполнена со смещением линеек излучающих элементов относительно друг друга на фиксированную величину, при этом технологический зазор между элементами излучения заполнен пенополиуретаном, приемная антенна выполнена в виде восьми линеек с фиксированным зазором, каждая из линеек набрана из двадцати полых цилиндрических пьезоэлементов, следующих друг за другом с фиксированным зазором.
Совокупность новых отличительных признаков, заключающихся в том, что стабилизатор состоит из двух плоскостей, образующих Х-образную конструкцию, заглубляющее устройство выполнено в виде горизонтального крыла и двух вертикальных крыльев, при этом вертикальные крылья установлены на полуосях, расположенных в поперечной плоскости относительно цилиндрического корпуса, и снабжены поворотным механизмом, вертикальные крылья расположены симметрично относительно друг друга, на верхней плоскости цилиндрического корпуса, на горизонтальном крыле установлен буксировочный узел, с герметичным разъемом для крепления кабель-троса и ввода кабеля в буксируемый подводный аппарат, кабель-трос снабжен гидродинамическим заглубителем, выполненным в виде гидродинамического заглубителя, снабженного системой с радиально направленными подпружиненными механическими датчиками, имеющими на концах колеса, в носовой части цилиндрический корпус сочленен с трубчатой скобообразной рамой, концы которой сочленены с соответствующими Х-образными плоскостями стабилизатора, в нижней части цилиндрический корпус снабжен нишей, в которой установлен крейт с закрепленными на нем элементами параметрического профилографа, ниша снабжена обтекателем, выполненным из сферопластика, буксируемый подводный аппарат дополнительно снабжен системой ориентации и навигации, состоящей из бесплатформенной инерциальной системы, информационно соединенного с бортовой аппаратурой управления судна-буксировщика и вычислительно-управляющего модуля буксируемого подводного аппарата, а в параметрическом профилографе, включающем излучающую параметрическую антенну накачки и приемную антенну, средства обработки и регистрации гидроакустических сигналов, излучающая параметрическая антенна накачки и приемная антенна выполнены в виде отдельных устройств, при этом излучающая параметрическая антенна, содержащая фазированную решетку и каналы усиления, выполнена с 12 каналами усиления, фазированная решетка выполнена со смещением линеек излучающих элементов относительно друг друга на фиксированную величину, при этом технологический зазор между элементами излучения заполнен пенополиуретаном, приемная антенна выполнена в виде восьми линеек с фиксированным зазором, каждая из линеек набрана из двадцати полых цилиндрических пьезоэлементов, следующих друг за другом с фиксированным зазором, из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «изобретательский уровень».
Сущность предлагаемого технического решения поясняется чертежами.
Фиг.1. Схема буксировки подводного аппарата. На схеме показаны: судно-буксировщик 1, снабженное устройствами постановки и буксировки подводного аппарата, буксируемый подводный аппарат 2, устройство заглубления 3, кабель-трос 4, морская поверхность 5, морское дно 6, трубопровод 7.
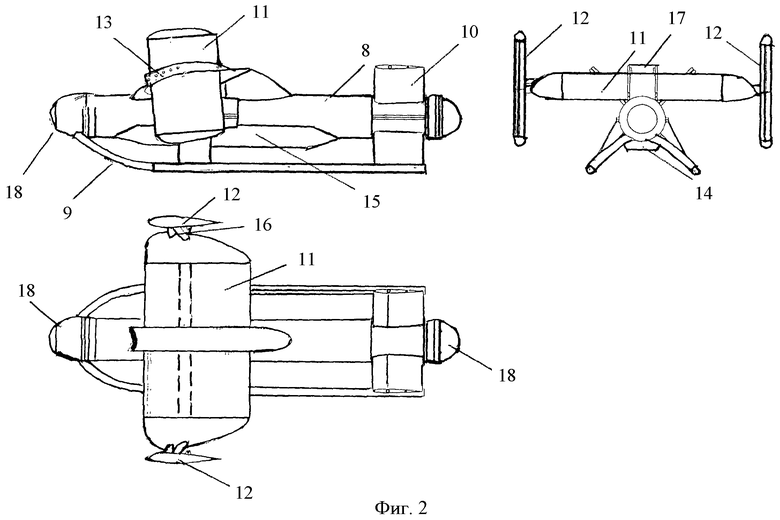
Фиг.2. Конструкция буксируемого подводного аппарата. Буксируемый подводный аппарат 2 включает прочный корпус 8, трубчатая скобообразную раму 9, стабилизатор 10, горизонтальное крыло 11, вертикальные крылья 12, буксировочный узел 13, обтекатель 14, нишу 15, полуось 16, электропривод 17. Передняя и задняя торцевые части прочного корпуса 8 снабжены обтекателем 18.
Фиг.3. Положение буксирной линии от судна-буксировщика до рабочей глубины 350 м при различных скоростях буксировки, где Hm - рабочая глубина, Y - длина буксировочного троса, V - скорость буксировки (V1=3 уз; V2=4 уз; V3=4,5 уз; V4=5 уз; V5=6 уз; V6=7 уз; V7=8,2 уз).
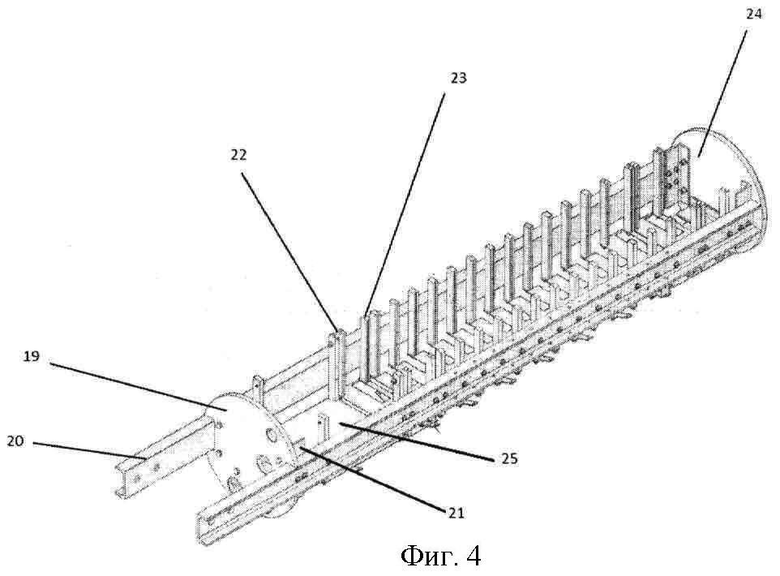
Фиг.4. Конструкция крейта. Крейт включает переднюю стенку 19, швеллер 20, уголок 21 для крепления передней стенки 19 к швеллеру 20, уголок 22 для крепления разделительного ребра, направляющую 23, заднюю стенку 24, разделительное ребро 25.
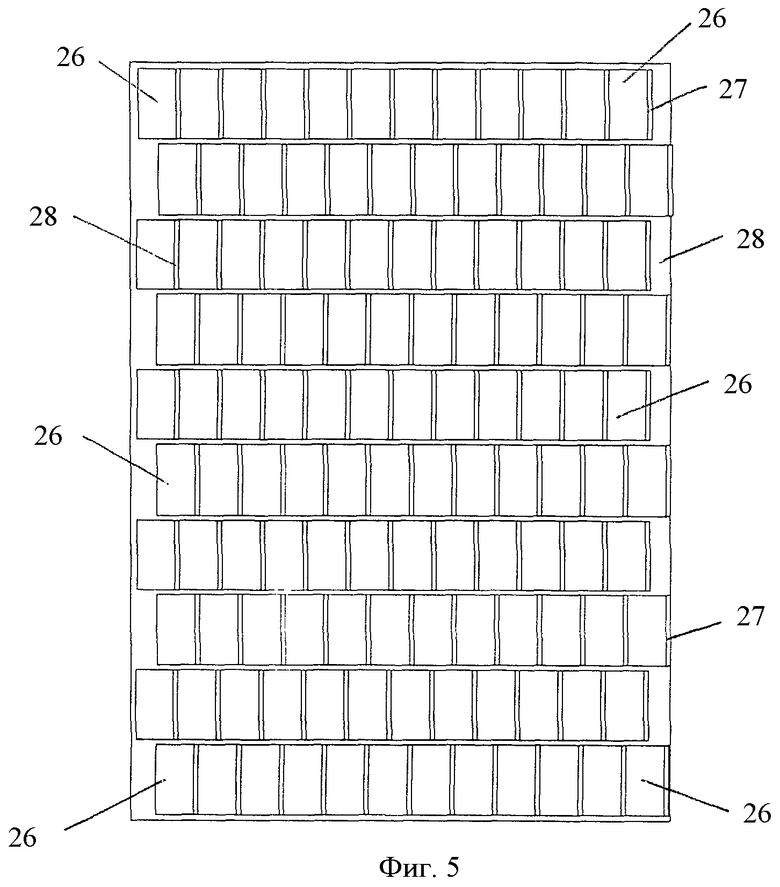
Фиг.5. Поверхность излучающей параметрической антенны. Поверхность излучающей параметрической антенны образована пьезоэлементами 26, запараллеленные в ячейки 27. Технологические зазоры 28 заполнены пенополиуретаном.
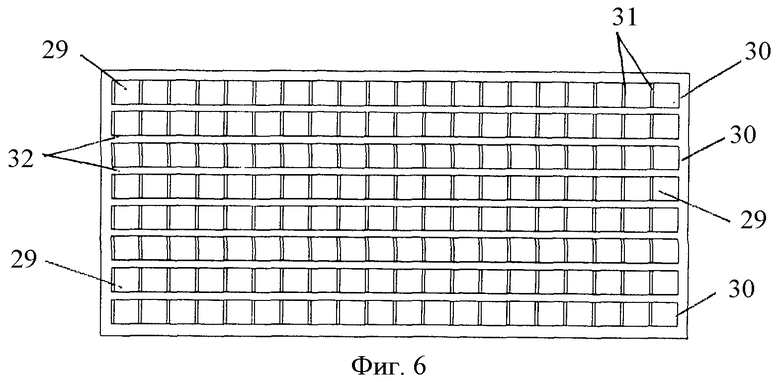
Фиг.6. Поверхность приемной антенны. Поверхность приемной антенны образована полыми цилиндрическими пьезоэлементами 29 с образованием восьми линеек 30. Зазоры 31 между полыми цилиндрическими пьезоэлементами в каждой линейке 30 равны 3 мм. Зазоры 32 между линейками 30 равны 4 мм.
Судно-буксировщик 1 содержит штатные судовые средства постановки буксируемого подводного аппарата, оснащенного гидроакустическими средствами зондирования подводной обстановки. К средствам постановки относятся лебедки, подъемные краны и т.д.
Внутри прочного корпуса 8 установлены приборы параметрического профилографа, система ориентации и навигации и вычислительно-управляющий модуль.
Управление буксируемым подводным аппаратом 2 осуществляется посредством бортовой аппаратуры, установленной в пульте управления на борту судна-буксировщика 1.
Трубчатая скобообразная рама 9 обеспечивает устойчивое положение буксируемого подводного аппарата на палубе и защищает антенны профилографа, расположенные под прочным корпусом 8 в нише 15, от случайных ударов о грунт и палубу. Трубчатая скобообразная рама 9 соединена с прочным корпусом 5 в носовой части буксируемого подводного аппарата при помощи двух наклонных плоских листов и в кормовой части при помощи двух элементов стабилизатора. Трубчатая скобообразная рама 9 изготовлена из алюминиевого сплава АМГ-6.
Прочный корпус 8 обеспечивает защиту расположенной внутри него аппаратуры от воздействия морской воды. В конструкции используется цилиндрический прочный корпус из алюминиевого сплава АМГ-6, имеющий внутренний диаметр 200 мм и толщину стенки 8 мм. Длина цилиндрической части корпуса (1800 мм) обеспечивает необходимый объем для размещения электронной аппаратуры. Ниша 15, расположенная в прочном корпусе 8, закрывается обтекателем 14, выполненным из сферопластика ЭДС-400ТЕ. На переднем обтекателе 18 при необходимости может быть установлена антенна гидролокатора бокового обзора или многолучевого эхолота.
Стабилизатор 10 обеспечивает гидродинамическую устойчивость буксируемого аппарата по направлению движения. Стабилизатор 10 имеет четыре плоскости, образующие X-образную конструкцию. Плоскости имеют профиль крыла и изготовлены из алюминиевого сплава АМГ-6.
Вертикальные крылья 12 служат для управления положением буксируемого аппарата в горизонтальной плоскости. Вертикальные крылья 12 прикреплены к горизонтальному заглубляющему крылу 11, имеют симметричный обтекаемый профиль. Расположение вертикальных крыльев 12 выбрано таким образом, чтобы равнодействующая боковых сил при их повороте проходила через буксировочный узел 13. При этом условии аппарат перемещается лагом без изменения угла курса.
Вертикальные крылья 12 приводятся в действие автоматизированным электроприводом триммирования ЭПТ-324 (двухдвигательный механизм поступательного движения, выполненный единым узлом). Электропривод позволяет осуществлять управление исполнительным механизмом по двум независимым электрическим каналам. Электропривод 17 устанавливается на горизонтальном заглубляющем крыле 11 в разгруженном корпусе, заполненном маслом.
Горизонтальное крыло 11 используется для перемещения буксируемого аппарата на рабочую глубину. Имеет симметричный профиль. Площадь крыла составляет ~0,5 м2, что позволяет при скорости 8,2 узла получить заглубляющее усилие ~500 кг.
На верхней поверхности цилиндрического корпуса, на горизонтальном крыле 11 расположен буксировочный узел 13, включающий силовую гребенку, позволяющую менять точку приложения усилия буксировки.
На концевых участках горизонтального крыла 11 установлены вертикальные крылья 12, выполненные в виде элерона, и представляют собой рули активной стабилизации буксируемого подводного аппарата 2 по крену.
Буксировочный кабель-трос 4 выполнен с учетом больших скоростей буксировки (до 8,2 уз). При этом важнейшими характеристиками кабель-троса 4 являются его механические параметры, такие как диаметр, разрывное усилие и вес погонного метра. Натяжение кабель-троса на коренном конце при скорости буксирования 8,2 узла (4,1 м/с) будет более 40 кН. Поэтому грузонесущая часть кабель-троса 4 имеет наружную броню из стальных оцинкованных проволок с разрывным усилием не менее 70 кН.
Так как по кабель-тросу 4 передается большой объем информации от параметрического профилографа и приборов навигации на судно-буксировщик и передача команд управления на буксируемый аппарат, то конструкция кабель-троса 4 имеет два оптических канала связи. Для заполнения сердечника и расширения функционального использования кабель-троса 4 в его конструкцию введены шесть сигнальных проводников.
В конкретном исполнении использован кабель-трос типа КГ (6×0,2+2×100 В)-70-90, отвечающего вышеизложенным требованиям.
Устройство заглубления 3 представляет собой гидродинамический заглубитель, который осуществляет перемещение буксируемого аппарата 2 по вертикали на рабочие глубины при заданных скоростях буксировки и длинах кабель-троса 4. Гидродинамический заглубитель 3 представляет собой конструкцию, в которой используются профили пластин, изогнутых по дуге круга и установленных между боковинами. Гидродинамический заглубитель 3 устанавливается на кабель-тросе 4 на расстоянии от 60 до 80 метров от буксируемого подводного аппарата, выполненного в виде гидродинамического заглубителя, снабженного системой с радиально направленными подпружиненными механическими датчиками, имеющими на концах колеса для перемещения заглубителя вдоль кабель-троса 4, что позволяет при необходимости изменять горизонт погружения буксируемого подводного аппарата.
Пульт управления буксируемым подводным аппаратом 2 установлен на палубе судна-буксировщика 1. В пульте управления расположен силовой блок, обеспечивающий преобразование электроэнергии и питание механизмов и оборудования буксируемого аппарата 2, блок электроники, персональный компьютер и органы управления.
Силовой блок стойки управления представляет собой инвертор, преобразующий однофазное судовое напряжение - 220 В, 50 Гц в постоянное напряжение 600 В для передачи его по кабель-тросу 4 на буксируемый подводный аппарат 2. Силовой блок обеспечивает набор необходимых напряжений для питания органов управления судового палубного блока. Силовой блок снабжен индикаторами включения судового напряжения и напряжения питания аппаратуры буксируемого подводного аппарата 2.
Блок электроники имеет модуль системы передачи, приема и обработки информации (системы телеметрии), обеспечивающий обмен информацией с буксируемым подводным аппаратом 2 по оптоволоконному кабелю и ее обработку.
На панели блока электроники установлен индикатор длины кабель-троса 4 от кормы судна-буксировщика 1 до буксируемого подводного аппарата 2. Сигнал к панели поступает от счетчика длины, установленного на буксирном блоке судового спуско-подъемного устройства.
В судовом палубном блоке расположен системный блок персонального компьютера, монитор и клавиатура на консоли.
На выносной консоли судового палубного блока установлены две рукоятки управления (манипуляторы). Один манипулятор предназначен для управления лаговым движением буксируемого подводного аппарата 2, второй - для дистанционного управления лебедкой.
На стандартной стойке судового палубного блока предусмотрена установка откидных панелей, предназначенных для крепления дублирующих персональных, компьютеров и вывода вспомогательной информации.
В состав системы ориентации и навигации входят датчики первичной информации, выполненные по технологиям микросистемной техники, а также аппаратные средства для сбора, предварительной обработки информации и реализации программно-алгоритмического обеспечения для решения задач ориентации и навигации.
Датчики первичной информации включают микромеханические гироскопы, микромеханические акселерометры, микромагнитометр векторный.
Аппаратные средства включают многоканальный аналого-цифровой преобразователь и цифровой сигнальный процессор.
Основой системы ориентации и навигации является бесплатформенная микромеханическая курсовертикаль. Курсовертикаль и вычислитель образуют микромеханический инерциальный измерительный блок (МИИБ). Блок предназначен для измерения углов курса, крена и дифферента буксируемого подводного аппарата 2, составляющих векторов угловой скорости, линейного ускорения, компонент магнитного поля. В качестве чувствительных элементов используются микромеханические датчики угловой скорости и линейного ускорения. Для измерения компонента магнитного поля используется магниторезистивный магнитометр. Магнитометр используется в качестве корректора МИИБ для компенсации погрешностей угловой ориентации, возникающих вследствие дрейфа микромеханических гироскопов. Аналоговые данные, поступающие с датчиков первичной информации, обрабатываются аналого-цифровым преобразователем высокой разрядности. Для реализации вычислительных алгоритмов в состав блока входит высокопроизводительный цифровой сигнальный процессор.
В качестве базовых чувствительных элементов в предлагаемом устройстве используется МИИБ, содержащий три датчика угловой скорости и три акселерометра, встроенный датчик температуры и собственный контроллер, обеспечивающий предварительную обработку сигналов гироскопов и акселерометров и выдачу ее в цифровом виде потребителям. Встроенный датчик температуры предназначен для коррекции температурных дрейфов датчиков угловой скорости и акселерометров. В качестве измерителя индукции магнитного поля используются магниторезистивные датчики. В качестве вычислителя применен цифровой сигнальный процессор Sharc ADSP21262LQFP.
Аппаратные средства системы управления, входящие в состав системы, обеспечивают независимое управление приводов каналов крена и курса, осуществляют измерение углов курса, крена и дифферента буксируемого подводного аппарата, измерение компонент векторов угловой скорости, линейного ускорения, магнитного поля, формируют управляющие сигналы для решения целевых задач управления и стабилизации.
Основным элементом вычислительно-управляющего модуля является микропроцессор на базе DSP-процессора, работающего под управлением встраиваемой операционной системы uCLinux.
Независимый привод каждого из каналов управления построен на основе системы привода производства компании Faulhaber. Высокоточная цифровая система управления приводом обеспечивает высокое быстродействие, позволяет регулировать параметры привода в широком диапазоне, обеспечивает точное позиционирование по углу поворота оси привода колеса.
Микромеханический инерциальный измерительный блок (МИИБ) определяет углы курса, крена и дифферента, обеспечивает систему управления инерциальной и навигационной информацией.
Вычислительно-управляющий модуль на основе DSP-процессора является устройством, обеспечивающим программную и аппаратную интеграцию отдельных блоков, входящих в состав аппаратных средств системы. Процессор позволяет выполнять операции над 32-х разрядными числами в формате с плавающей запятой, что обеспечивает точность вычислений, достаточную для решения большинства задач управления и навигации. Тактовая частота процессора составляет 400 МГц. Помимо процессора в состав платы вычислительно-управляющего модуля входят микросхемы памяти SDRAM, микросхемы памяти flash, микросхемы интерфейсов ввода-вывода. Такое построение системы позволяет решать в реальном времени сложные вычислительные задачи, большой объем оперативной памяти системы позволяет осуществлять реализацию ресурсоемких алгоритмов.
Различные компоненты системы управления и навигации подключены к вычислительно-управляющему модулю с помощью последовательных синхронных и асинхронных портов ввода-вывода. Контроллеры привода каналов управления подключены к модулю с помощью асинхронных портов ввода-вывода UART0 и UART1. С помощью данных интерфейсов контроллерам передаются команды, задающие режимы движения валов, а контроллеры, в свою очередь, обеспечивают модуль информацией об угловом положении валов, токах в двигателях, скорости вращения.
Микромеханическая курсовертикаль в составе МИИБ подключена к вычислительному модулю с помощью синхронного последовательного порта SPORT. Вывод данных, а также управление оператором осуществляется с помощью блока, реализующего двунаправленный канал передачи данных, подключенного к вычислительно-управляющему модулю с помощью асинхронного интерфейса UART2. Все операции обмена между модулем и периферийными устройствами осуществляются с помощью использования механизмов DMA (прямого доступа к памяти), что позволяет, несмотря на интенсивность операций обмена данными, разгрузить ядро цифрового сигнального процессора.
Система управления и стабилизации буксируемого подводного аппарата по крену и курсу предназначена для задания ориентации в пространстве установленного на нем параметрического профилографа. Для управления ориентацией вокруг одной оси используется система привода, состоящая из двигателя постоянного тока с редуктором и магнитным энкодером и системы управления. Двигатель постоянного тока типа «Faulhaber» имеет конструкцию с полым ротором, что дает ряд преимуществ, таких как: низкое энергопотребление, отсутствие потерь в сердечнике ротора, низкое напряжение трогания, малый момент инерции ротора, позволяющие быстрые разгон и торможение, низкие массогабаритные показатели. В составе привода использован редуктор типа «Faulhaber» в исполнении со стальными шестернями для обеспечения повышенной износоустойчивости. Магнитный энкодер IE-512 обеспечивает высокое разрешение в 512 линий на оборот, что позволяет осуществлять плавное и высокоточное управление приводом.
В цифровом контроллере MCDC3003 в качестве вычислителя используется цифровой сигнальный процессор, что позволяет осуществлять высокоточное и высокоскоростное управление (0.18° - ошибка по углу, частота работы следящего контура - 100 Гц). Цифровой контроллер привода принимает по интерфейсу UART поступающие от вычислительно-управляющего модуля команды. Режимы работы привода задаются соответствующими форматами команд, при этом используются режимы управления по угловому положению (задается и поддерживается по достижении целевое угловое положение) и управления по скорости (задается величина угловой скорости вращения вала). Для настройки параметров следящего контура контроллера пользователю предлагается ряд параметров, таких как: максимальное угловое ускорение, максимальная угловая скорость, максимальный ток в двигателе, пропорциональный и интегральный коэффициенты цепи обратной связи по угловой скорости, пропорциональный и дифференциальный коэффициенты цепи обратной связи по угловому положению вала. Все вышеперечисленные коэффициенты могут быть подобраны исходя из заданного критерия оптимальности, и изменены в процессе работы для адаптации к изменившемуся режиму движения.
Для решения задач навигации буксируемого подводного аппарата 2 используются следующие варианты аппаратного обеспечения.
1. Определение координат относительно буксирующего судна 1 на основе информации о длине троса и угла, измеряемого на буксирующем судне 1 либо на буксируемом подводном аппарате с помощью курсовертикали.
2. Определение координат относительно буксирующего судна 1 на основе информации о длине троса и угловой азимутальной скорости, измеряемой с помощью датчика угловой скорости в составе курсовертикали.
3. Определение координат относительно буксирующего судна на основе информации от датчика скорости буксируемого подводного аппарата 2 и азимутального угла ориентации буксируемого подводного аппарата 2 от курсовертикали.
4. Определение координат с помощью инерциальной системы.
Приемно-излучающая антенна закрыта обтекателем 15, выполненным из сферопластика ЭДС-400ТЕ. Основная задача обтекателя 15 антенны параметрического профилографа заключается в перекрытие зазора между прочным корпусом 8 буксируемого подводного аппарата 2 и антенной профилографа и обеспечить плавный переход от плоскости антенны к обечайке корпуса.
Для проведения работ с буксируемым подводным аппаратом используются суда, имеющие возможность плавно регулировать ход в диапазоне от 2 до 10 узлов. Судно-буксировщик имеет подруливающие устройства, так как буксирная линия значительно ухудшает маневренность судна.
Судно-буксировщик оснащено спуско-подъемном устройством (СПУ), которое представляет собой П-образную раму, установленную на корме или кран-манипулятор. В диаметральной плоскости судна установлена тяговая лебедка с усилиями, соответствующими характеру буксировки, и с соответствующей емкостью барабана. Лебедка оборудуется кабелеукладчиком, скользящим токосъемником, счетчиком длины вытравленного кабель-троса 4.
СПУ оборудовано канифас-блоком с боковыми ограничивающими ролами. Боковые ролы препятствуют сходу кабель-троса 4 из ручья канифас-блока при развороте судна-буксировщика 1 на новый галс или сильной боковой качке.
При производстве работ по буксировке подводное буксируемый подводный аппарат располагают на палубе под рамой СПУ, находящейся в походном (заваленном на палубу) положении. Кабель-трос закрепляется на буксируемом подводном аппарате и заводится в канифас-блок. Тяговая лебедка выбирает слабину и приподнимает буксируемый подводный аппарат над палубой. Далее производится вынос П-рамы СПУ за корму.
Судно-буксировщик 1 дает «самый малый» вперед и оператор лебедки начинает травить кабель-трос до достижения буксируемым подводным аппаратом 2 заданной глубины.
При значительном волнении при спуске и подъеме буксируемый подводный аппарат берется на оттяжки, препятствуя его раскачке с борта на борт.
При работе на больших скоростях для достижения требуемых глубин применяется гидродинамический заглубитель 3, который устанавливается на кабель-трос 4 в 60-70 метрах от буксируемого подводного аппарата 2.
Установка гидродинамического заглубителя 3 заключается в следующем:
- опустив буксируемый подводный аппарат на 50-70 метров, судовая лебедка останавливается, кабель-трос 4 фиксируется клиновым зажимом, после чего лебедка дает слабину палубной части кабель-троса 4,
- гидродинамический заглубитель 3 устанавливается на палубе, свободная часть кабель-троса 4 заводится в ложемент гидродинамического заглубителя 3 и фиксируется на нем наложенными захватами,
- СПУ поднимает гидродинамический заглубитель 3, лебедка выбирает слабину так, чтобы можно было освободить клиновый зажим,
- СПУ выносит гидродинамический заглубитель 3 за корму, при этом лебедка выпускает кабель-трос 4, давая возможность П-образной раме вынести гидродинамический заглубитель 3. Как только гидродинамический заглубитель 3 оказывается за бортом, оператор лебедки набивает трос, снимая нагрузку с крана. После этого, глаголь-гак освобождает подъемный трос, на котором опускается гидродинамический заглубитель 3. СПУ становится в исходное положение, и оператор лебедки начинает опускание всей системы до рабочей глубины.
Подъем гидродинамического, заглубителя 3 и буксируемого подводного аппарата 2 происходит в обратной последовательности.
Если на судне нет кормовой П-образной рамы, то буксирование можно осуществлять с борта, вешая канифас-блок на «выстрел». В этом случае буксируемый подводный аппарат 2 выносят за борт и опускают в воду бортовым краном на спусковом тросе с глаголь-гаком. После спуска буксируемого подводного аппарата 2 в воду кабель-трос 4 заводится в буксировочный канифас-блок, посредством лебедки выбирает слабину, снимая нагрузку со спускового троса. Раскрывается глаголь-гак, освобождая буксируемый подводный аппарат 2 от спускового троса. Во всех случаях на судне должна быть кабельная лебедка с токосъемником, при этом весь такелаж должен иметь радиусы изгиба не менее 20 диаметров кабель-троса 4.
При проведении испытаний заявляемого технического решения (буксируемый подводный аппарат) были получены различные положения «чистого» кабель-троса 4, которые он занимает в водном потоке при движении судна-буксировщика 1 со скоростями от 0,5 до 4,1 м/с. При штатной строительной длине кабель-троса 4, равной 1000 м, буксируемый подводный аппарат 2 достигает заданной рабочей глубины в 350 м только до скорости 3 уз (1,5 м/с).
Для расширения диапазона скоростей буксирования введен гидродинамический заглубитель 3, а буксируемый подводный аппарат снабжен горизонтальным заглубляющим крылом 11.
Выполнение прочного корпуса со сферическими крышками оптимальна по своим гидродинамическим свойствам, удобна с точки зрения монтажа и обслуживания оборудования, экономична по затратам материала и технологии изготовления. Стабилизатор, горизонтальное крыло, вертикальные крылья и гидродинамический заглубитель обеспечивают устойчивость и управляемость буксируемого подводного аппарата. При этом достигаются следующие технические характеристики:
- диапазон рабочих глубин от 0 до 350 м;
- скорость буксировки при профилировании от 0,5 до 4,1 м/с (от 1 до 8,2 уз);
- буксируемый подводный аппарат при движении обеспечивает стабилизацию по крену и дифференту, максимальные углы отклонения по крену и дифференту не превышают 5°±3°;
- буксирный кабель-трос выдерживает максимальное усилие 42 кН с разрывным усилием 70-90 кН;
- буксируемый подводный аппарат способен совершать поперечные перемещения при движении судна-буксировщика прямым курсом;
- масса полезной нагрузки буксируемого устройства - не менее 30 кг;
- масса буксируемого устройства без аппаратуры профилографа - не более 60 кг;
- электропитание от судовой сети однофазным переменным током напряжением 220 В ± 10% и частотой 50 Гц ± 10%;
- аппаратура буксируемого устройства обеспечивает возможность непрерывной работы в течение 72 часов.
Результаты испытаний предлагаемого буксируемого подводного аппарата 2 показали (фиг.3), что необходимая длина кабель-троса 4 для достижения рабочей глубины 350 м колеблется от 500 до 2200 м при изменении скорости от 3 до 8,2 уз.
При фиксированной длине кабель-троса 1000 м буксируемый подводный аппарат может достигать рабочей глубины 350 м до скоростей около 5 уз (2,5 м/с). При больших скоростях ПБУ начнет «всплывать». Так при скорости буксирования 8,2 уз (4,1 м/с), буксируемый подводный аппарат может опуститься до глубины около 200 м.
Предлагаемый буксируемый подводный аппарат предназначен для установки многолучевого параметрического профилографа, работающего на принципах нелинейной параметрической акустики для обследования трубопроводов и других заиленных объектов природного и техногенного происхождения. Получаемая информация в режиме реального времени обрабатывается и передается на борт судна-буксировщика 2.
Многолучевой параметрический профилограф монтируется на крейте, который вставляется в нишу и закрывается обтекателем.
Крейт (фиг.4) представляет собой рамную конструкцию из алюминиевого сплава. Преимущества алюминиевого сплава по сравнению со сталью заключаются:
- в меньшем удельном весе алюминия (практически в 4 раза), что позволяет уменьшить вес конструкции;
- коррозийной стойкости;
- легкости обработки, что снижает износ инструмента и соответственно снижает стоимость изготовления изделия.
Несущими элементами конструкции являются два швеллера 50×20×4 мм (по ГОСТ 13623-90) с параллельными полками. На одном из торцов швеллеров предусмотрены крепежные отверстия для соединения крейта с аппаратом.
С торцов крейта расположены пластины концентрической формы диаметром 198 мм (с учетом того, что внутренний диаметр ПБУ составляет 200 мм), служащие стенками крейта. Форма стенок крейта продиктована формой корпуса аппарата, имеющего круглую форму с внутренним диаметром 200 мм. Стенки придают конструкции поперечную жесткость. Также к стенкам через переходные уголки крепится разделительное ребро с системой крепления жгутов и общей шины. Отверстия в стенках предназначены для ввода-вывода сигнальных и силовых жгутов и кабелей, а также ввода оптического кабеля.
Разделительное ребро расположено в нижней части крейта и электрически и конструктивно отделяет сигнальные жгуты от силовых. Такая конструкция выбрана для того, чтобы уменьшить влияние помех от силовых жгутов на сигнальные и на работу усилителей и сигнального модуля.
На задней торцевой стенке расположен ролик, предназначенный для компенсации силы трения между корпусом подводного буксируемого аппарата и крейтом в момент монтажа.
Длина крейта составляет 1200 мм, что обусловлено размерами блоков и модулей входящих в состав аппаратной части профилографа.
Для удобства монтажа аппаратуры крейт конструктивно разделен на секции. Также «разделители» служат направляющими. Модульная конструкция крейта позволяет легко проводить монтаж-демонтаж блоков и модулей, а также подключать силовые и сигнальные кабели и жгуты.
Аналоги параметрического профилографа приведены в кн.: Воронин В.А., Тарасов В.И., Тимошенко В.И. Гидроакустические параметрические системы. ООО «Ростиздат» Ростов-на-Дону, 2004, с.224-252.
Гидроакустические профилографы уже давно перестали быть средством только научных исследований и в настоящее время, объединяя в себе функции обычного эхолота и устройства, визуализирующего придонные и поддонные структуры, являются мощным инструментом для проведения поисковых, контрольных, проектно-изыскательских, осмотровых, промерных работ в акваториях морских портов, в руслах рек, в шельфовой зоне. Профилографы могут использоваться как самостоятельно, так и в составе гидрографических комплексов. Часто гидроакустические профилографы становятся единственным средством визуализации структуры донных отложений, поиска и оконтуривания заиленных объектов, включая нефте- и газопроводы, другие потенциально опасные объекты.
В последнее время актуальность создания техники донного профилирования возрастает в связи с дальнейшим освоением шельфовых территорий мирового океана. Разработка месторождений углеводородного сырья, прокладка газо- и нефтепроводов («Северный поток», «Голубой поток», «Южный поток» и др.) потребует дополнительного привлечения технических средств донного профилирования. В первую очередь это гидролокаторы-профилографы, дающие возможность с высоким пространственным разрешением получать профиль донной поверхности, обнаруживать и оконтуривать придонные и заиленные объекты, в том числе и малых размеров, Все большую актуальность приобретает задача дистанционной классификации типа грунта, особенно при производстве геолого-разведочных и гидротехнических работ.
Ухудшение экологической обстановки, связанное с дальнейшим развитием технологий и производств, добычей, транспортировкой и сжиганием углеводородного сырья, в том числе и на шельфовых территориях мирового океана, требует создания техники мониторинга подводных трубопроводов и других размещаемых на шельфе инженерно-технических сооружений.
В таких условиях актуальным становится создание многофункциональных профилографов для прецизионной стратификации донных осадков, классификации типа грунта и поиска придонных и заиленных объектов, представляющих потенциальную опасность.
Наиболее перспективным направлением в технике зондирования морского дна является создание профилографов, работающих на принципах нелинейной акустики, получивших название параметрических профилографов. Эти приборы сочетают в себе все уникальные свойства параметрических антенн - отсутствие боковых лепестков характеристики направленности, малогабаритность антенны, возможность перестройки частоты и др. Перечисленные свойства позволяют в отличие от обычных линейных систем не только обнаруживать акустические неоднородности, но и определять их координаты, производить классификацию по геометрическим признакам. Это делает параметрические профилографы незаменимым инструментом при обследовании трубопроводов и других заиленных объектов природного и техногенного происхождения.
Для обеспечения обследования трубопроводов необходимо обеспечить суммарный сектор обзора профилографа в траверзной плоскости 30° при разрешающей способности по углу не более 3° с учетом ограниченных массогабаритных характеристик подводного буксируемого аппарата, отвечающего требованиям гидродинамики при его буксировке на скоростях до 8 уз.
В соответствии с этим была принята топология излучающей антенны накачки параметрического профилографа, позволяющая формировать в пространстве веер из 5 характеристик направленности (направления осей -12°, -6°, 0°, +6°, +12°), развитых в траверзной плоскости буксируемого аппарата так, чтобы суммарный сектор обзора составлял 30°. Ширина одиночной характеристики направленности (ХН) в траверзной плоскости - 6°, в диаметральной плоскости - 3°. При выборе способа решения поставленной задачи необходимо учитывать достаточно высокую частоту волн накачки - 250 кГц (длина волны 6 мм), а также характерные для параметрических антенн высокие пиковые и повышенные средние по времени интенсивности излучения (до 15-20 Вт/см2).
Основными критериями при выборе варианта решения данной задачи были минимизация массогабаритных показателей, технологичность, а также стоимость реализации.
Известные технические решения, включающие формирование, веера характеристик направленности содержат несколько вариантов построения приемо-излучающих трактов параметрических профилографов.
В первом варианте (так называемый вариант «сектор-антенна») предусматривается построение антенной системы из пяти идентичных отдельных антенн, возбуждаемых от пяти отдельных усилителей мощности, либо от одного коммутируемого. При этом излучающие поверхности антенн в траверзной плоскости располагаются по дуге окружности с центральным углом в 30°.
При этом каждая из пяти антенн формирует поле волн накачки с характеристикой направленности, имеющей ширину 6°×3°, соответственно в траверзной и диаметральной плоскостях. Преимуществами варианта сектор-антенна являются:
- расширенные функциональные возможности, в частности возможность одновременного излучения всеми антеннами одновременно, что позволит реализовать режим профилографа с повышенной скоростью зондирования (до пяти раз);
- идентичность всех характеристик направленности, образующих сектор обзора профилографа в траверзной плоскости;
- минимальное количество электронных модулей усилителей мощности (от 1 до 5, в зависимости от режима коммутации);
- невысокие требования к обеспечению теплового режима каждой антенны;
- простота конструкции единичной антенны (по сравнению, например, с антенной решеткой).
К недостаткам такого варианта решения поставленной технической задачи следует отнести повышенные массогабаритные показатели антенны (что слабо коррелируется с необходимостью оборудования данными антеннами подводного буксируемого аппарата, к тому же способного совершать поперечные перемещения), увеличенный расход пьезоактивных материалов, и, как следствие, рост ее стоимости за счет этого фактора.
Во втором варианте, так называемой «классическая полуволновая антенная решетка» предлагается топология 20-элементной антенны (антенной, решетки). При этом размеры элементов по осям х и у антенны составляют 1х×1у=2.5×105 мм, расстояние между центрами элементов по оси x dx=3 мм соответственно, зазоры между элементами - 0.5 мм, размеры излучающей части антенны - 60 мм по оси х и 105 мм по оси у. Реализация данного варианта антенны требует большого количества (20) усилителей мощности, что также приводит к громоздкости конструкции профилографа.
Таким образом, применение фазированной антенной решетки с полуволновым расстоянием между центрами излучающих элементов потребует большого количества каналов усиления мощности, что напрямую технически и экономически нецелесообразно.
Одним из путей решения задачи уменьшения количества групп элементов антенны, а, следовательно, и количества каналов усиления, является увеличение межцентровых расстояний между элементами антенны с одновременным увеличением их размеров в направлении оси X. Такой подход к решению поставленной задачи настолько же очевиден, насколько очевидны возникающие при его реализации сложности. Из теории антенных решеток известно, что при увеличении межцентровых расстояний решетки, состоящей из ненаправленных элементов в характеристике направленности антенны, возникают дополнительные единичные паразитные лепестки. Поэтому был выполнен дополнительный анализ возможности реализации такого подхода к решению поставленной задачи с учетом направленности отдельных элементов.
В ходе дополнительного анализа были рассмотрены «одномерная 1 - волновая линейка направленных элементов», «две запараллеленных одно волновых линейки с ненаправленными элементами, стоящие рядом и сдвинутые на половину длины волны» ХН такой антенны при различных значениях углов компенсации, равны соответственно 0, 6, 12. При этом с ростом величины угла компенсации наблюдается небольшое снижение уровня давления в направлении основного максимума с одновременным значительным ростом уровень паразитного бокового поля, максимум которого с ростом угла компенсации приближается в направлению основного. При Θ0=±12° уровень основного максимума снижается до 0,93, в то время как уровень паразитных боковых лепестков увеличивается до 0,33, что в относительных величинах составляет 35%. Такой уровень бокового поля недопустимо велик.
Таким образом, в рамках одномерной модели фазированной антенной решетки попытка уменьшения каналов усиления, даже с учетом направленных свойств элементов антенны, не дает приемлемых результатов, так как приводит к недопустимо большому уровню бокового поля антенны.
В варианте «две запараллеленных одноволновых линейки с ненаправленными элементами, стоящие рядом и сдвинутые на половину длины волны» позволяет уменьшить паразитные максимумы, но полностью подавить выбросы не удается.
В варианте «несколько запараллеленных одноволновых линеек направленных элементов со сдвигом четных линеек относительно нечетных на половину длины волны» при условии сглаживания фазового распределения вдоль решетки, можно в значительной степени подавить вышеупомянутые, выбросы. Однако сделать это ценой увеличения числа усилителей мощности неприемлемо. Поэтому была рассмотрена структура антенной решетки в виде нескольких запараллеленных одноволновых линеек направленных элементов со сдвигом четных линеек относительно нечетных на половину длины волны, что и дает сглаживание фазы в дальней зоне антенны. Семейство характеристик направленности такой решетки имеет достаточно хорошие параметры, и такое построение антенной системы с 12-ю каналами усиления реализовано в качестве излучающей антенны накачки.
В результате проведенного компьютерного моделирования с целью минимизации уровня бокового поля антенны в среде Mathcabi были получены следующие данные. При ширине основного лепестка характеристики направленности антенны в диаметральной плоскости - 3°, в траверзной - 5° размер активной поверхности антенны составит 60×105 мм2. При этом размеры одного элемента в плоскости антенны составят 4,5×10 мм2, зазор между элементами - 0.5 мм. Общий вид компоновки элементов излучающей антенны показан на фиг.5.
Проведенное математическое моделирование различных вариантов технических решений и последующий анализ его результатов с использованием критериев минимизации весогабаритных показателей, технологичности, стоимости реализации показали возможность выбора в качестве рабочего варианта для реализации излучающей антенны накачки параметрического профилографа фазированной антенной решетки со смещением линеек излучающих элементов относительно друг друга на фиксированную величину. Такой вариант реализации позволяет удовлетворить требованиям поиска подводных трубопроводов с учетом заиленного грунта и возможных просадок трубопровода, обеспечивая поворот оси характеристики направленности на углы до ±12°, без значительного ухудшения параметров поля излучения, снизить требуемое количество каналов усиления мощности до 12.
Приемная антенна параметрического профилографа имеет широкую диаграмму направленности с одноканальным приемом при размере активной поверхности 300×152 мм и чувствительности 500 мкВ/Па и выполнен в виде набора полых цилиндрических пьезоэлементов с акустическим мягким экраном, с размером активной поверхности 300×152 мм, имеющих следующие параметры: высота - 12 мм, диаметр - 15 мм, толщина - 1 мм, выполненных из сплав ЦТС-19М. Чувствительность для отдельного элемента приемной антенны составляет 85 мкВ/Па.
Ввиду того, что непосредственный акустический контакт активных элементов приемной антенны с нагружающей средой и элементами конструкции может привести к их демпфированию и уменьшению чувствительности, то с целью минимизации демпфирующего действия указанных факторов применены полые цилиндры с акустически мягким экраном. В качестве акустического экрана возможно применение полиуретановых пенопластов, обладающих достаточно высокой механической жесткостью, которая позволяет избежать недопустимых деформаций датчика на рабочих глубинах. В то же время, удельный акустический импеданс полиуретановых пенопластов z=300-400 кг/(м2с) значительно меньше его характерных значений у пьезокерамических материалов z=3·107 кг/(м2с), что позволяет считать акустические экраны, выполненные из таких материалов, близких к идеальным.
Применение акустического экрана в конструкции приемной антенны позволяет избавиться от нежелательного тыльного лепестка в ее диаграмме направленности.
Чувствительность приемной антенны определяется ее направленными свойствами, способом электрического соединения ее элементов, используемой модой колебаний, соотношения резонансной частоты отдельного элемента и рабочей частоты, составом материала пьезоэлемента и степенью его демпфирования.
Сравнительный анализ характеристик чувствительности пьезоэлементов на различных модах показал, что наилучшие показатели чувствительности имеет мода радиальных колебаний круговых цилиндров на поперечном пьезоэффекте. При этом токосъемные электроды нанесены на боковых поверхностях цилиндра.
Конструктивно приемная антенна выполняется в виде 8-ми линеек, с зазором 4 мм, каждая из которых набрана из 20 элементов, следующих с зазором 3 мм. Технологический зазор между элементами антенны заполняется материалом акустического экрана - пенополиуретаном.
Излучающая антенна представляет собой фазированную антенную решетку, на которую подаются сигналы излучения от 12-ти усилителей мощности при размере активной поверхности: 60×105 мм.
Излучающий тракт параметрического профилографа включает излучающую антенну, устройство управления и формирования сигналов излучения, которое состоит из:
- 12 усилителей мощности;
- узла формирования сигналов излучения.
Приемный тракт параметрического профилографа включает приемную антенну, приемник гидроакустических сигналов, узел связи с пультом управления и индикации, который установлен на судне-буксировщике.
Пульт управления и индикации представляет собой персональный компьютер морского исполнения и систему передачи информации и данных телеуправления, состоящую из:
- медиаконвертера, преобразующего оптические сигналы связи с аппаратурой буксируемого подводного аппарата в электрические;
- сетевого коммутатора, позволяющего организовать одновременную работу профилографа с другими подсистемами (судовой системой позиционирования, гидролокатором бокового обзора или эхолотом).
Функциональные узлы приемно-усилительного тракта включают:
1) приемную гидроакустическую антенну;
2) коммутатор сигналов, как составную часть системы технической диагностики;
3) полосовые фильтры;
4) первый каскад усиления и второй каскад усиления;
5) 18-разрядный аналого-цифровой преобразователь;
6) формирователь опорного напряжения;
7) блок цифровой первичной обработки сигналов и формирования выходного массива обработанных данных в составе программируемой логической интегральной схемы (ПЛИС);
8) модуль управления цифроаналоговым преобразователем в составе ПЛИС, формирующий сигналы ВАРУ1 и ВАРУ2, а также тестовый сигнал SigTest;
9) 12-разрядный многоканальный ЦАП для формирования сигналов ВАРУ1 и ВАРУ2, а также тестового сигнала SigTest;
10) узел нормировки уровня тестового сигнала SigTest, выполненный на фильтре и делителе.
Основная часть функциональных узлов приемно-усилительного тракта конструктивно реализована в едином модуле.
Излучающий тракт содержит следующие функциональные узлы:
1) излучающую гидроакустическую антенну;
2) двенадцать каналов усилителей мощности, каждый из которых содержит:
а) датчик выходного тока;
б) резонансный фильтр, в качестве цепи согласования выхода усилителя мощности и входа излучающей антенны;
в) мостовой усилитель мощности;
г) узел формирования сигналов управления силовыми транзисторами, выполненный на предварительном усилителе и схеме формирования задержек;
д) узел гальванической развязки;
3) двенадцать выходных буферных усилителей сигналов управления;
4) блок цифрового формирования сигналов управления усилителями мощности в составе ПЛИС;
5) полосовые фильтры сигналов датчиков тока, как составные части системы технической диагностики;
6) коммутатор тестовых сигналов, как составную часть системы технической диагностики;
7) 8-разрядный аналого-цифровой преобразователь, как составную часть системы технической диагностики;
8) модуль сбора и формирования массивов тестовых данных, в составе ПЛИС;
9) встроенный в излучающую антенну датчик температуры и модуль обработки информации в составе микроконтроллера.
Система каналов связи и обмена данными с аппаратурой профилографа, другими составными частями профилографа и внешними системами включает в себя:
1) оптический канал связи Fast Ethernet 100BaseFX между бортовой и забортной аппаратурой профилографа и в том числе оптический модуль, и медиаконвертер;
2) канал связи RS-232 между забортной аппаратурой профилографа и забортной аппаратурой подводного буксируемого устройства;
3) канал связи Ethernet 100BaseTX с многолучевым эхолотом или гидролокатором бокового обзора;
4) канал связи Ethernet 100BaseTX с планшетом рулевого;
5) канал связи Ethernet 100BaseTX с системой относительного подводного позиционирования буксируемого устройства;
6) канал связи RS-232 с приемником GPS;
7) канал связи RS-232 с устройством электропитания;
8) резервный канал связи Ethernet 100BaseTX с внешними системами.
Тракт излучения создает узкий луч диаграммы направленности благодаря использованию параметрического метода формирования сигналов. Он заключается в следующем: антенна излучает ультразвуковой сигнал с двумя высокочастотными составляющими, вследствие прохождения через нелинейную водную среду, сигналы перемножаются и образуют полезный сигнал низкой частоты (3 кГц - 10 кГц). Акустическая мощность в момент излучения приблизительно составляет 12 кВт. Из этого следует, что электрическая мощность блока усилителей должна быть не менее 24 кВт (в данном случае учитываются тепловые потери). Каждая часть антенны (всего 12 частей) обладает комплексным сопротивлением 170 Ом, поэтому оптимальным напряжением питания будет 600 В. В усилителе мощности применены компоненты, способные работать при данном напряжении и импульсном токе 4 А. В связи с тем, что система излучения работает в импульсном режиме, применен блок накопительных конденсаторов, отдающий основную часть энергии во время зондирования, и накапливающий энергию в промежутках между зондированиями. При скважности зондирующих импульсов Q=25 и уменьшения уровня напряжения питания в конце импульса ΔU=10%, емкость блока накопительных конденсаторов должна быть не менее 2500 мкФ. Блок накопительных конденсаторов состоит из двух электролитических конденсаторов емкостью 5600 мкф и напряжением 450 В каждый, соединенных последовательно. Для выравнивания потенциалов на каждом конденсаторе применен резистивный делитель.
Модуль усилителя спроектирован по мостовой схеме D-класса, имеющий на выходе цепь согласования, которая формирует резонансы на двух рабочих частотах. Параметры элементов цепи согласования подобраны таким образом, чтобы получить максимальную электрическую мощность и нулевой сдвиг фаз между током и напряжением на двух рабочих частотах.
Приемный тракт работает на разностной частоте зондирующего сигнала. Приемник построен по схеме прямого усиления. Такая схема обеспечивает наименьшие искажения в тракте усиления сигнала.
Приемная антенна подключается к приемнику через пассивный LC фильтр четвертого порядка. Такой фильтр обеспечивает фильтрацию нижних частот с частотой среза порядка 1 кГц и с характеристикой, соответствующей фильтру Бесселя второго порядка и частоту среза порядка 20 кГц с характеристикой, соответствующей фильтру Бесселя второго порядка. В низкочастотной области этот фильтр обеспечивает предварительную фильтрацию внешних шумов. Одним из наиболее сильных шумов в этой области является шум буксирующего судна. В верхней области спектра этот фильтр устраняет прохождение на вход приемника частоты накачки при излучении в параметрическом режиме. Среднее значение этой частоты - 250 кГц. Пассивный фильтр на входе приемника нужен для того, чтобы не перегружать тракт приемника аддитивными шумами. Низкий уровень аддитивных шумов обеспечивает также уменьшение интермодуляционных продуктов, образующихся от нелинейного взаимодействия сигнала и шумов в тракте приемника. (Заметим, что для современных микросхем, применяемых в трактах гидролокационной аппаратуры последний фактор не является актуальным).
Приведенные шумы на входе приемника определяются несколькими факторами: собственные приведенные шумы микросхемы усилителя, эквивалентное сопротивление приемной антенны, полоса принимаемых частот, шумы антенны. Для усилительного тракта применен один из новейших усилителей фирмы Analog Devices, предназначенных для разработки гидроакустической аппаратуры. С учетом всех факторов приведенные шумы на входе приемника составляют около 1,5 мкВ.
Сквозное усиление приемного тракта выбирается таким образом, чтобы собственные шумы на выходе приемника составляли бы не более 1/6 апертуры усилителя. В противном случае (при увеличении доли шумов при максимальном усилении) может наступить ограничение шумов, что приведет к сильным нелинейным эффектам взаимодействия шумов с возможным слабым сигналом. В результате такого взаимодействия резко ухудшится качество приема. Максимальное усиление приемного тракта может достигать величины порядка 120 Дб.
Весь аналоговый тракт приемника выполнен по дифференциальной схеме. Такая схема обеспечивает повышенную устойчивость приемника и пониженную чувствительность к шумам, возникающим в приемном тракте от других компонентов системы.
Аналоговый сигнал с выхода усилителя приемника поступает на АЦП через дифференциальный согласующий фильтр второго прядка (порядок - по отношению к эквивалентному недифференциальному фильтру). Этот фильтр обеспечивает согласование спектральной полосы сигнал + шум по отношению к частоте дискретизации. Частота дискретизации в АЦП составляет 250 кГц. АЦП - 18 разрядный, поразрядного взвешивания.
Цифровые отсчеты с выхода АЦП подаются на программируемую логическую интегральную схему (ПЛИС) семейства «Cyclone 3» фирмы Altera для первичной цифровой обработки. В ней выполняется унифицированная обработка, состоящая из вычисления текущих отсчетов взаимной корреляционной функции между принимаемым сигналом и образом сигнала, загружаемым в ПЛИС. В силу большой мощности ПЛИС, выбранной для системы приема, имеется возможность делать такую обработку без переноса сигнала по спектру в область низких частот с использованием квадратурного детектирования. Такой подход обеспечивает предельные характеристики при цифровой обработке при том, что дополнительных форм фильтрации принимаемого сигнала производить не нужно. К тому же обеспечивается потенциально достижимый уровень помехоустойчивости приема (оптимальный приемник). Образцы принимаемого сигнала для корреляционной обработки загружаются в ПЛИС.
Прием и передача информации в системе осуществляется по интерфейсу Ethernet. Физический канал связи - оптическое одномодовое волокно. Связь обеспечивается микроконтроллером AVR32 фирмы Atmel.
Предлагаемый буксируемый подводный аппарат способен производить поперечные горизонтальные перемещения при движении судна-буксировщика прямым курсом, что увеличивает зону обследования и производительность буксируемой системы. В зависимости от заданного режима гидроакустической съемки он способен перемещаться на различных расстояниях от морского дна. Предлагаемый буксируемый подводный аппарат в отличие от известных аналогичных устройств, имеет широкий диапазон скоростей буксировки (до 8 узлов).
Предлагаемое устройство должно найти широкое применение при решении задач развития техники гидроакустических систем обследования подводной обстановки, позиционирования подводных объектов, мониторинга дна и состояния трубопроводов, а также проведения водолазных работ. В отличие от существующих систем, предлагаемое устройство для зондирования морского дна способно совершать поперечные перемещения при движении судна-буксировщика прямым курсом в широком диапазоне скоростей буксировки.
Промышленная реализация заявляемого технического решения сложности не представляет, что позволяет сделать вывод о соответствии заявляемого технического предложения условию патентоспособности «промышленная применимость».
Источники информации
1. В.А.Воронин, С.П.Тарасов, В.И.Тимощенко. Гидроакустические параметрические системы. Ростов-на-Дону. ООО Ростиздат. 2004, с.257.
2. Авторское свидетельство СССР №1308040.
3. Авторское свидетельство СССР №1360405.
| название | год | авторы | номер документа |
|---|---|---|---|
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| Буксируемый подводный аппарат | 2022 |
|
RU2795071C1 |
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| ПОДВОДНАЯ БУКСИРУЕМАЯ ПОИСКОВАЯ СИСТЕМА | 2009 |
|
RU2410280C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СИСТЕМА НАВИГАЦИИ БУКСИРУЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2529207C1 |

Изобретение относится к области производства подводных работ для зондирования морского дна в целях донного профилирования, прокладки трасс трубопроводов с привязкой к географическим координатам, обнаружения заиленных объектов. Буксируемый подводный аппарат оснащен гидроакустической аппаратурой и выполнен в виде полого цилиндрического корпуса со съемной головкой и хвостовым стабилизатором, снабжен заглубляющим устройством и оснащен параметрическим профилографом и вычислительно-управляющим модулем, и соединен с судном-буксировщиком кабель-тросом. Стабилизатор состоит из двух плоскостей, образующих Х-образную конструкцию. Заглубляющее устройство выполнено в виде горизонтального крыла и двух вертикальных крыльев, установленных на полуосях, расположенных в поперечной плоскости относительно цилиндрического корпуса. На горизонтальном крыле установлен буксировочный узел с герметичным разъемом для крепления кабель-троса, на котором установлен гидродинамический заглубитель. В нижней части цилиндрического корпуса в нише установлен крейт с закрепленными на нем элементами параметрического профилографа. Гидроакустическая аппаратура включает параметрический профилограф, состоящий из излучающей параметрической антенны накачки и приемной антенны, средств обработки и регистрации гидроакустических сигналов. Повышается достоверность обнаружения подводных объектов за счет повышения точности ориентации буксируемого подводного аппарата. 2 н.п. ф-лы, 6 ил.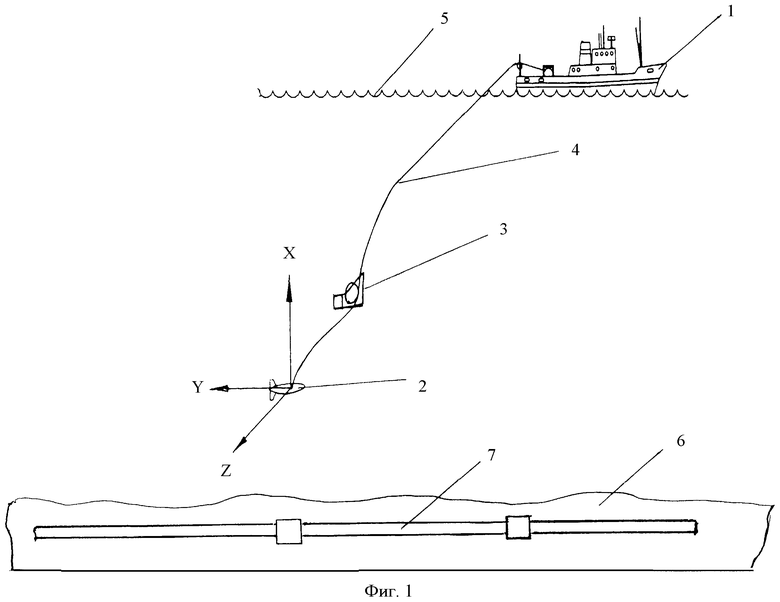
1. Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и выполненный в виде полого цилиндрического корпуса со съемной головкой и хвостовым стабилизатором, снабженный заглубляющим устройством и оснащенный параметрическим профилографом, вычислительно-управляющим модулем, и соединенный с судном-буксировщиком кабель-тросом, отличающийся тем, что стабилизатор состоит из двух плоскостей, образующих Х-образную конструкцию, заглубляющее устройство выполнено в виде горизонтального крыла и двух вертикальных крыльев, при этом вертикальные крылья установлены на полуосях, расположенных в поперечной плоскости относительно цилиндрического корпуса, и снабжены поворотным механизмом, вертикальные крылья расположены симметрично относительно друг друга, на верхней плоскости цилиндрического корпуса на горизонтальном крыле установлен буксировочный узел с герметичным разъемом для крепления кабель-троса и ввода кабеля в буксируемый подводный аппарат, кабель-трос снабжен гидродинамическим заглубителем, снабженным системой с радиально направленными подпружиненными механическими датчиками, имеющими на концах колеса, в носовой части цилиндрический корпус сочленен с трубчатой скобообразной рамой, концы которой сочленены с соответствующими Х-образными плоскостями стабилизатора, в нижней части цилиндрический корпус снабжен нишей, в которой установлен крейт с закрепленными на нем элементами параметрического профилографа, ниша снабжена обтекателем, выполненным из сферопластика, буксируемый подводный аппарат дополнительно снабжен системой ориентации и навигации, состоящей из бесплатформенной инерциальной системы, информационно соединенной с бортовой аппаратурой управления судна-буксировщика, и вычислительно-управляющего модуля буксируемого подводного аппарата.
2. Гидроакустическая аппаратура, включающая параметрический профилограф, состоящий из излучающей параметрической антенны накачки и приемной антенны, средств обработки и регистрации гидроакустических сигналов, отличающаясяся тем, что излучающая параметрическая антенна накачки и приемная антенна выполнены в виде отдельных устройств, при этом излучающая параметрическая антенна, содержащая фазированную решетку и каналы усиления, выполнена с 12 каналами усиления, фазированная решетка выполнена со смещением линеек излучающих элементов относительно друг друга на фиксированную величину, при этом технологический зазор между элементами излучения заполнен пенополиуретаном, приемная антенна выполнена в виде восьми линеек с фиксированным зазором, каждая из линеек набрана из двадцати полых цилиндрических пьезоэлементов, следующих друг за другом с фиксированным зазором.
| Воронин В.А | |||
| и др | |||
| Гидроакустические параметрические системы | |||
| -, Ростов-на-Дону: ООО Ростиздат, 2004, с.257 | |||
| Способ цис-трансизомеризации радикалов свободных ненасыщенных жирных кислот или их эфиров | 1959 |
|
SU123648A1 |
| US 3638601 А, 01.02.1972 | |||
| Подводный носитель океанографических приборов | 1978 |
|
SU1028242A3 |
| Устройство для гидрографического траления дна | 1976 |
|
SU602407A1 |

