Изобретение относится к подъемно-транспортному машиностроению и может быть использовано в сельском хозяйстве, химической, пищевой и других отраслях промышленности для перемещения сыпучих и мелкокусковых материалов.
Известен вибрационный конвейер (авторское свидетельство SU 1819839 А1, B65G 27/00, 1989), содержащий два грузонесущих органа, соединенных между собой качалками, шарнирно соединенными со стенками, которые установлены на опорной раме, эксцентриковый вибропобудитель и упругие резиновые элементы, соединяющие грузонесущие органы посредством кронштейнов.
Недостатками известного устройства являются высокая материалоемкость из-за толкающего воздействия вибропобудителя на грузонесущий орган и ограниченные технологические возможности по длине перемещения сыпучих материалов.
Известен подвесной вибрационный конвейер (Спиваковский А.О., Дьячков В.К. Транспортирующие машины. М.: Машиностроение, 1983, стр.373, рис.13.9а), содержащий желоб, упругие подвески, вибропобудитель, продольное ребро жесткости (выбран в качестве прототипа).
Известный подвесной вибрационный конвейер также обладает высокой материалоемкостью и ограниченной длиной перемещения сыпучих материалов из-за толкающего воздействия вибропобудителя на желоб.
Цель изобретения - снижение материалоемкости, расширение технологических возможностей.
Поставленная цель достигается тем, что в вибрационном конвейере, содержащем желоб, подвески и вибропобудитель, согласно изобретению желоб состоит из двух частей, симметрично расположенных относительно эксцентрикового вибропобудителя и соединенных с ним шарнирными звеньями, противоположные концы частей желоба снабжены штоками с регулируемыми тарелками, опирающимися на пружины жесткостью С>Мω2 и величиной сжатия, большей величины эксцентриситета вибропобудителя, подвески выполнены в виде гибких тяг различной длины, обеспечивающих пологонаклонное расположение обеих частей желоба к горизонту.
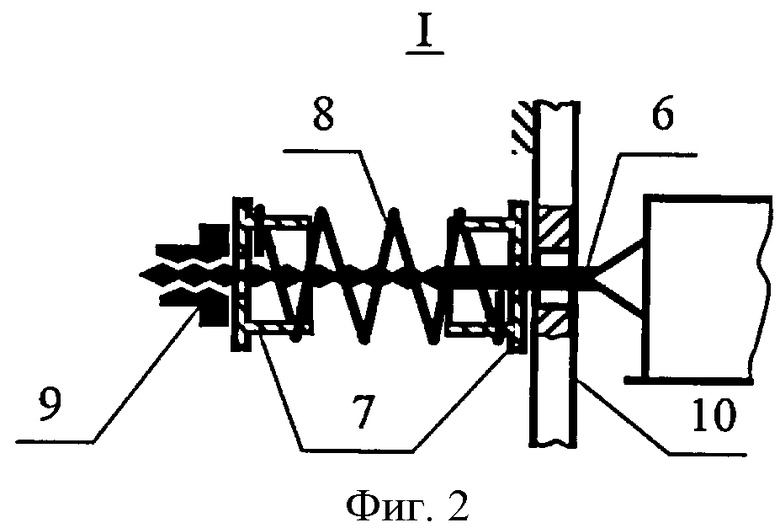
Сущность изобретения поясняется чертежами, где на фиг.1 показан общий вид вибрационного конвейера, на фиг.2 - узел I.
Вибрационный конвейер содержит желоб 1, подвески 2 различной длины, вибропобудитель 3 с эксцентриком 4, шарнирные звенья 5, штоки 6, регулируемые тарелки 7, пружины 8, регулировочные гайки 9, опорные стенки 10.
Вибрационный конвейер работает следующим образом.
На две части желоба 1 в любой момент времени воздействуют растягивающие усилия сжатых пружин 8 через штоки 6, регулируемые тарелки 7, фиксируемые на штоках 6 регулировочными гайками 9. При прямом ходе одной части желоба 1 (например, левой) сжатая пружина 8 (левая) обеспечивает его перемещение на величину, равную двум эксцентриситетам (2 ε) эксцентрика 4 вибропобудителя 3. Поворачиваясь на 180° эксцентрик 4 посредством правого шарнирного звена 5 через правую часть желоба 1, шток 6 с тарелкой 7 при этом сжимает правую пружину 8. Последующий поворот эксцентрика 4 на 180° обеспечивает обратный ход левой части желоба 1, сжимая левую пружину 8, и освобождает прямой ход правой части желоба 1 посредством правой сжатой пружины 8. Затем колебательные движения двух частей желоба 1 повторяются. Находящиеся в пологонаклонных частях желоба 1 частицы сыпучих материалов подвергаются воздействию инерционных сил, скатывающих сил и сил трения. При прямом ходе сумма инерционных и скатывающих сил преодолевает силы трения, обеспечивая перемещение сыпучего материала от центра вибрационного конвейера к периферии.
Величину сжатия пружин 8 можно установить анализом исходного положения вибрационного конвейера (см. фиг.1), когда эксцентрик 4 вибропобудителя 3 находится в положении, симметричном относительно вертикальной оси. При этом обе пружины 8 сжаты гайками 9 на величину (ℓ), большую величины эксцентриситета (ε) вибропобудителя 3 (ℓ>ε), что исключает толкающее воздействие вибропобудителя 3 на желоб 1. Реактивная сила сжатых пружин 8 воспринимается опорными стенками 10. Условие ℓ>ε и быстродействие пружин (скорость их разжатия), превышающее линейные скорости шарнирных звеньев 5, перемещаемых вибропобудителем 3, гарантирует растягивающее силовое воздействие на обе части желоба 1 в любой момент времени. При этом резко снижаются требования к жесткости желоба 1, что создает предпосылки снижения материалоемкости вибрационного конвейера и расширения его технологических возможностей по длине транспортирования сыпучих материалов. При наличии подвесок 2 различной длины, выполненных в виде гибких тяг, обеспечивающих пологонаклонное расположение обеих частей желоба 1 к горизонту, и реальном соотношении их длины (L) относительно величины эксцентриситета (L>>ε) они не влияют на динамику колебаний желоба 1, то есть исключается необходимость использования специальных балок (или рамных конструкций) для крепления подвесок 2 различной длины, что также обеспечивает снижение материалоемкости вибрационного конвейера и расширение технологических возможностей по условиям его применения - они могут быть прикреплены к перекрытиям производственных помещений с различными объемно-планировочными решениями. Жесткость пружин 8 должна соответствовать балансу сил F1 и F2:

где F1 - усилие, создаваемое пружиной, сжатой на величину ℓ=ε;
F2 - сила инерции подвижных составных частей половины вибрационного конвейера и сыпучего материала, находящегося в ней;
С - жесткость пружины;
М - масса подвижных составных частей половины вибрационного конвейера и сыпучего материала, находящегося в ней;
ω - частота вращения эксцентрика;
ε - величина эксцентриситета.
Для минимально необходимой степени сжатия пружин 8 справедливо:

Из равенства (2) следует, что гарантированное растягивающее силовое воздействие на желоб 1 в любой момент времени обеспечивается при условии, когда С>Мω2. Регулируемые тарелки 7 посредством регулировочных гаек 9 обеспечивают изменение степени сжатия пружин 8, что позволяет оптимизировать режим перемещения различных сыпучих материалов при изменении ε эксцентрика - расширить технологические возможности вибрационного конвейера.
Предложенный вибрационный конвейер может быть использован в сельском хозяйстве для распределения кормов по фронту кормления значительной величины. Причем условие (L>>ε) и допустимость использования различных длин подвесок 2 обеспечивает расширение технологических возможностей при разнообразии объемно-планировочных решений животноводческих помещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный конвейер | 2016 |
|
RU2617306C1 |
| Способ вибрационного транспортирования фуражного зерна и других сыпучих материалов | 2016 |
|
RU2617280C1 |
| СТАЦИОНАРНЫЙ СЕКЦИОННЫЙ КАЧАЮЩИЙСЯ ТРАНСПОРТЕР | 2009 |
|
RU2442736C2 |
| Питатель для сыпучих материалов | 1990 |
|
SU1727627A1 |
| Лотковый вибропитатель для сыпучих материалов | 1983 |
|
SU1081083A1 |
| Подвеска постоянного усилия | 2020 |
|
RU2753088C1 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕРр-,~- ,-Г^Г\• •'^с.Щ A<JО '^ ..-X.,' t^ , \~' OV^ ^^*4П;. K.iu ЬО- i LXasSt^^Sraf БИБЛИОТЕКА | 1973 |
|
SU361944A1 |
| Способ и устройство для высева сыпучих материалов | 1982 |
|
SU1055377A1 |
| Опора постоянного усилия | 2020 |
|
RU2747532C1 |
| Вибрационный питатель | 1986 |
|
SU1791281A1 |
Вибрационный конвейер содержит желоб (1), подвески (2) различной длины и вибропобудитель (3) с экцентриком (4). Желоб состоит из двух частей, симметрично расположенных относительно вибропобудителя и соединенных с ним шарнирными звеньями (5). Противоположные концы частей желоба снабжены штоками (6) с регулируемыми тарелками (7), опирающимися на пружины (8) жесткостью С>Мω2, где С - жесткость пружины; М - масса подвижных составных частей половины вибрационного конвейера и сыпучего материала, находящегося в ней; ω - частота вращения эксцентрика, и величиной сжатия, большей величины эксцентриситета вибропобудителя. Обеспечивается снижение материалоемкости и расширение технологических возможностей конвейера. 2 ил.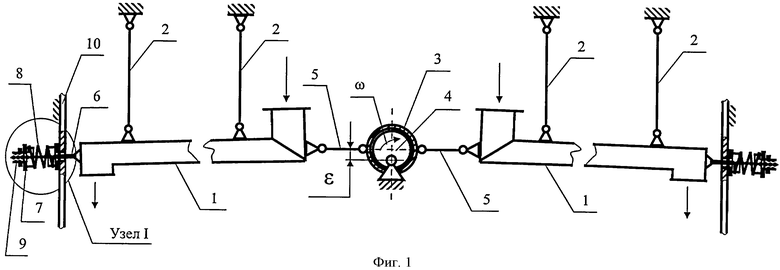
Вибрационный конвейер, содержащий желоб, подвески и вибропобудитель, отличающийся тем, что желоб состоит из двух частей, симметрично расположенных относительно эксцентрикового вибропобудителя и соединенных с ним шарнирными звеньями, противоположные концы частей желоба снабжены штоками с регулируемыми тарелками, опирающимися на пружины жесткостью С>Мω2,
где С - жесткость пружины;
М - масса подвижных составных частей половины вибрационного конвейера и сыпучего материала, находящегося в ней;
ω - частота вращения эксцентрика,
и величиной сжатия, большей величины эксцентриситета вибропобудителя, подвески выполнены в виде гибких тяг различной длины, обеспечивающих пологонаклонное расположение частей желоба к горизонту.
| ВИБРАЦИОННЫЙ КОНВЕЙЕР-ПИТАТЕЛЬ | 1998 |
|
RU2153453C2 |
| Вибрационный конвейер | 1989 |
|
SU1819839A1 |
| Качающий конвейер Выжленкова | 1984 |
|
SU1212887A1 |
| US 6161680 A, 19.12.2000 | |||
| DE 19917925 A1, 30.12.1999. | |||

