Настоящее изобретение в классе изделий контрольно-измерительной техники относится к силоизмерительным системам средств, использующих гибкие соединения при перемещении и транспортировке грузов для регистрации и контроля напряжений, действующих в гибких соединениях, без их разрыва.
Предназначено изобретение для оборудования производств тяжелого и общего машиностроения, преимущественно подъемно-транспортного и кранового, на всех видах транспорта, в геологоразведочной, горной, добывающей и строительно-монтажной отраслях промышленности.
Изобретение применимо в технике с нагруженными гибкими соединениями и подвижными связями для измерения действующих усилий, контроля допустимых и близких к предельным значениям напряжений, предупреждения аварийных режимов эксплуатации и обеспечения техники безопасности.
Использовано изобретение может быть при подъемно-транспортных, грузоподъемных, транспортно-складских, погрузо-разгрузочных, монтажно-высотных, буксировочных и такелажных работах, на рельсовом и безрельсовом наземном, подземном и водном транспорте, в мостостроении (вантовом и подвесном), растяжках высотных конструкций и сооружений и других, подобных перечисленным.
Не исключено использование изобретения как формирователя входного сигнала для взвешивающих устройств и весоизмерительных комплексов в качестве датчика веса.
Перечисленным сфера использования заявленного не исчерпывается и может быть продолжена.
Из уровня техники известны средства контроля усилий и измерения натяжения подвижных или неподвижных ветвей гибких соединений, содержащие чувствительный элемент, преобразователь сигнала и регистрирующее устройство.
Известным заданного назначения и близкого по устройству средствам характерен изгиб гибкого соединения (ГС) и вызванная этим необходимость специального механизма, усложняющего устройство.
Основой известных устройств аналогичного ряда является жесткая конструкция, составляющая механизм прижима-прогиба ГС и наличие передающих к преобразователю сигнал звеньев.
Близким к заявленному изобретению техническим решением является датчик натяжения гибкого органа, защищенный патентом RU №2195637 (1).
Датчик содержит упругий элемент с внутренней цилиндрической полостью, мембрану с преобразователем механического возмущения в электрический сигнал, жесткую балку и фиксатор. Прижимо-прогибочный механизм датчика состоит из двух стоек с вырезами для укладки гибкого соединения, ложемента, скобы и пластины.
Усилие от ГС передается упругому элементу, воздействующему на мембрану, соединенную с чувствительным элементом, преобразующим механическое возмущение в электрический сигнал, пропорциональный приложенной силе.
Известно другое, направленное на достижение аналогичного результата, устройство по авторскому свидетельству №977739 МПК Е21В 47/00 (2) для измерения натяжения гибкого органа как производной от давления жидкости в цилиндре, плунжер которого воспринимает усилие от гибкого органа.
Соответствующее приложенной силе давление измеряется и показывает натяжение гибкого органа.
В качестве прототипа настоящего изобретения выбрано устройство, реализующее способ измерения натяжения гибкого органа, защищенный патентом RU №2209963 (3), отличием которого заявлена точность, превосходящая аналогичный, выбранный по отношению к описываемому в качестве прототипа, способ по свидетельству на полезную модель №19088 от 10.08.2001 г., отличающийся, в свою очередь, уменьшенной на порядок погрешностью измерений.
Однако, как следует из описания, уменьшенная на порядок погрешность сочетается с недостаточной точностью измерений силы натяжения гибкого органа, отнесенной к недостаткам выбранного прототипа.
Критикуется достоинство, а недостаток представлен достоинством критикуемого прототипа.
Способ измерения натяжения гибкого органа оп патенту RU 2209963, суть которого состоит в том, что упругий элемент защемляется обоими концами на гибком органе, исключая его изгиб, что, по мнению автора, повышает точность измерений.
Достигается заявленный результат измерением удлинения упругого элемента, выполненного из материала с показателем жесткости большим, чем жесткость гибкого органа.
Способ реализуется следующим образом.
Упругий элемент, жесткость которого превосходит жесткость гибкого органа, двумя зажимами на определенном расстоянии крепится к гибкому органу, жесткость которого меньше.
Приложенная к гибкому органу сила передается упругому элементу и связанному с ним преобразователю, на выходе которого формируется сигнал, соответствующий действующей силе.
Способ, отличающийся высокой точностью, разрешает крепление упругого элемента к гибкому органу, оставляя неразрешенным крепление преобразователя к упругому элементу.
Неразрешенное и не раскрытое по существу крепление преобразователя к упругому элементу оставляет не определенным влияние крепления на погрешность и не создает представления о точности, заявленной в описании как признак, имеющий существенные отличия.
Воспринимающий возмущения преобразователь является чувствительным элементом, а упругий элемент - жесткая конструкция, на которую действие внешних сил и температурных колебаний вызовет погрешности, существенно влияющие на точность измерений.
Чувствительность устройства, реализованного с использованием описанного способа, так же уязвима в связи с тем, что упругий элемент подвергается деформации по всей длине, а имеющий определенные габариты преобразователь жестко крепится на участке элемента, соответствующего его геометрии и габаритам.
Из этого следует заключить, что достижение точности измерений во всем диапазоне неосуществимо и не может быть обеспечено.
Описанный способ дает представление о том, как и каким образом упругий элемент растягивается, но вопрос, как в гибком органе действующая в одном направлении сила будет сжимать гибкий орган, оставляет не раскрытым.
Сопоставительный анализ известных (2) и (3) публикаций показал наличие технического противоречия, суть которого состоит в том, что описанные технические решения точности не обеспечивают. Снятый описанным способом с части упругого элемента сигнал будет уступать по точности сигналу, снятому со всего деформируемого участка упругого элемента.
В устройстве, реализующем описанный способ, вектор приложенной силы действует в плоскости гибкого органа и упругого элемента и направлен в сторону действия нагрузки, растягивая упругий элемент, что не может способствовать повышению чувствительности из-за малости линейных приращения от усилий, действующих в плоскости оси гибкого органа.
Анализ известных приводит к заключению о необходимости нового, более совершенного технического решения, совмещающего чувствительность с высокой точностью, отвечающего требованиям стабильности и качества измерений.
Целью настоящего изобретения является разрешение установленного анализом технического противоречия, в результате которого исключается свойственный известному способу недостаток и высокая точность измерений совмещается с чувствительностью.
Достижение поставленной цели возможно при изменении подхода к разрешению противоречия.
Если вектор силы, деформирующей упругий элемент, действуя в плоскости оси гибкого органа, не достигает цели, то необходимо рассматривать вектор, действующий в плоскости, перпендикулярной оси гибкого соединения.
Для этого жестко защемленный с обоих концов упругий прямолинейный элемент заменим жестко защемленной с одного конца, дугообразной пружиной, контактирующей непосредственно с чувствительным элементом, преобразующим механическое воздействие в полезный сигнал.
Суть настоящего изобретения состоит в том, что напряженное ГС действует на упругую рейку, контактирующую непосредственно с чувствительным элементом.
В качестве чувствительного элемента используют упруго деформируемый проволочный датчик, располагая его перпендикулярно оси действия измеряемой силы.
Устройство и принцип действия регистратора.
Регистратор устроен следующим образом.
Основу устройства составляет упругая рейка 2 (см. схему), жестко защемленная одним концом с ГС 1 и жесткой рейкой 3 посредством обжима защемляющего 4. Другим концом упругая рейка связана с ГС 1 и жесткой рейкой 3 с помощью обжима направляющего 5, не ограничивающего смещение свободного конца упругой рейки 2. В зазор, образованный упругой 2 и жесткой 3 рейками, помещают чувствительный элемент 6, выполненный в виде стержня из упругого материала, засверленного с торца, как проволочный датчик.
Представление о работе регистратора дает представленная схема. Испытывающее напряжение от приложенной силы гибкое соединение 1 через упругую рейку 2 действует на чувствительный элемент 6. Испытывающий сжатие чувствительный элемент 6 преобразует механическое воздействие в электрический сигнал, снимаемый с обмоток в форме удобной для регистрации.
Чувствительный элемент 6 устроен следующим образом. Стержень из упругого материала имеет с торца сверление, образующее полость в виде цилиндра. Наружная поверхность стержня покрывается изолятором, на который укладываются обмотки из тонкой тензочувствительной проволоки, изменяющей параметры цепи, формирующей под действием давления полезный, удобный для регистрации, хранения и передачи сигнал.
Температурная компенсация и стабильность полезного сигнала предусмотрены устройством проволочного датчика.
Схема
1 - гибкое соединение, 2 - упругая рейка, 3 - жесткая рейка, 4 - обжим защемляющий, 5 - обжим направляющий, 6 - чувствительный элемент.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2195637C2 |
| ДАТЧИК НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2002 |
|
RU2204815C1 |
| Устройство для измерения натяжения металлизируемых рулонных материалов | 1979 |
|
SU979913A1 |
| УЗЕЛ БУРОВОГО СТЕНДА | 1992 |
|
RU2021461C1 |
| ТЕНЗОРЕЗИСТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2586259C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ В ГИБКИХ СОЕДИНЕНИЯХ | 1973 |
|
SU1840602A1 |
| Устройство для измерения давления | 1990 |
|
SU1765735A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАВНОМЕРНОГО НАТЯЖЕНИЯ МЕМБРАНЫ ИЗ ИЗОТРОПНОГО МАТЕРИАЛА | 2012 |
|
RU2497088C2 |
| УСТРОЙСТВО И СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТУННЕЛЕЙ | 2006 |
|
RU2330238C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2205375C1 |
Изобретение относится к области контроля и регистрации, измерения, обработки и хранения данных, а именно контроля состояния гибких соединений, используемых в различных сферах промышленности и отраслях народного хозяйства. Регистратор напряжения гибких соединений без их разрыва содержит упругую рейку и контактирующий с ней чувствительный элемент, при этом согласно изобретению регистратор дополнительно содержит жесткую рейку, при этом упругая рейка жестко защемлена одним концом с исследуемым гибким соединением и указанной жесткой рейкой с помощью защемляющего обжима, а другим концом связана с исследуемым гибким соединением и жесткой рейкой с помощью направляющего обжима. В качестве чувствительного элемента использован проволочный датчик, помещенный между упомянутыми рейками, в плоскости, перпендикулярной оси действия сил. Технический результат - обеспечение точности и стабильности измерений в сочетании с высокой чувствительностью, относительной простотой и надежностью в эксплуатации. 1 ил.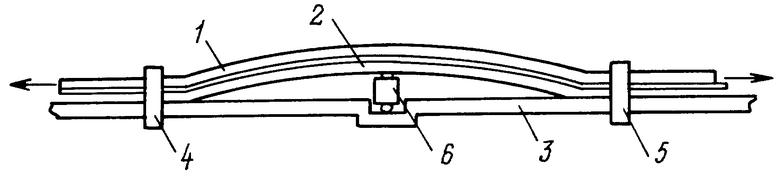
Регистратор напряжения гибких соединений без их разрыва, содержащий упругую рейку и контактирующий с ней чувствительный элемент, отличающийся тем, что устройство дополнительно содержит жесткую рейку, при этом упругая рейка жестко защемлена одним концом с исследуемым гибким соединением и указанной жесткой рейкой с помощью защемляющего обжима, а другим концом связана с исследуемым гибким соединением и жесткой рейкой с помощью направляющего обжима, а в качестве чувствительного элемента использован проволочный датчик, помещенный между упомянутыми рейками, в плоскости, перпендикулярной оси действия сил.
| СПОСОБ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2209963C1 |
| Чувствительный элемент многокомпонентных аэродинамических и гидродинамических весов | 1956 |
|
SU106178A1 |
| Устройство для определения внутренних деформаций в объектах | 1986 |
|
SU1401260A1 |
| УСТРОЙСТВО для ИЗЛ\ЕРЕНИЯ НАГРУЗОК | 0 |
|
SU213385A1 |

