Изобретение относится к измерительной технике и может быть использовано для определения натяжения гибкого органа, например, каната, кабеля, проволоки и т.п., применяемых в различных отраслях народного хозяйства, в частности в нефтяной и газовой промышленности.
Известен датчик, применяемый для измерения натяжения гибкого органа, содержащий опорную раму, гидроцилиндр с плунжером, соединенный с индикатором усилия, три обводных ролика, один из которых укреплен на рычаге (см. авт. свид. по Кл. Е 21 В 47/00, 977739). Данный датчик позволяет измерять силу натяжения гибкого органа, однако он имеет низкую точность и низкую надежность.
Известен датчик, применяемый для измерения натяжения каната, содержащий упругий элемент, состоящий из двух плоских стальных пластин, связанных хомутом, ролики, сидящие на втулках, седло, накладки, гайки, индукционный преобразователь, состоящий из подвижного и неподвижного сердечников, преобразующий механическую величину (перемещение) в электрический сигнал, пропорциональный измеряемой величине (натяжение гибкого органа) (см. кн. Л.Ф.Куликовский. Индуктивные измерители перемещений, ГОСЭНЕРГОИЗДАТ, М.-Л., 1961, стр. 263-266). Датчик позволяет измерять натяжение гибкого органа. Однако он обладает низкой чувствительностью, точностью измерений и ненадежен при его эксплуатации.
Сущность изобретения. Изобретение направлено на создание такого датчика, который бы позволил измерять силу натяжения гибкого органа при высокой чувствительности и точности и был бы надежен при эксплуатации.
Технический результат, опосредствующий решение указанной задачи, заключается в том, что при натяжении гибкого органа увеличивается деформация мембраны за счет перемещения как правого, так и левого конца упругого элемента, поэтому выходной сигнал преобразователя, пропорциональный деформации мембраны, также увеличивается, следовательно увеличивается чувствительность, а выполнение мембраны совместно с упругим элементом и преобразователем позволит повысить надежность за счет упрощения конструкции датчика.
Указанный технический результат достигается тем, что датчик натяжения гибкого органа содержит упругий элемент с внутренней цилиндрической полостью, на одном конце которой в поперечном сечении размещена мембрана с жесткой консольной балкой и преобразователем, а на другом ее конце расположен упор, взаимодействующий с концом консольной балки, прижимно-прогибочное устройство гибкого органа, включающее две стойки с вырезами для укладки гибкого органа, ложемент, скобу для прижатия гибкого органа к ложементу. В качестве преобразователя используют полупроводниковый тензочувствительный элемент. Упругий элемент с торцов герметично закрывается крышками.
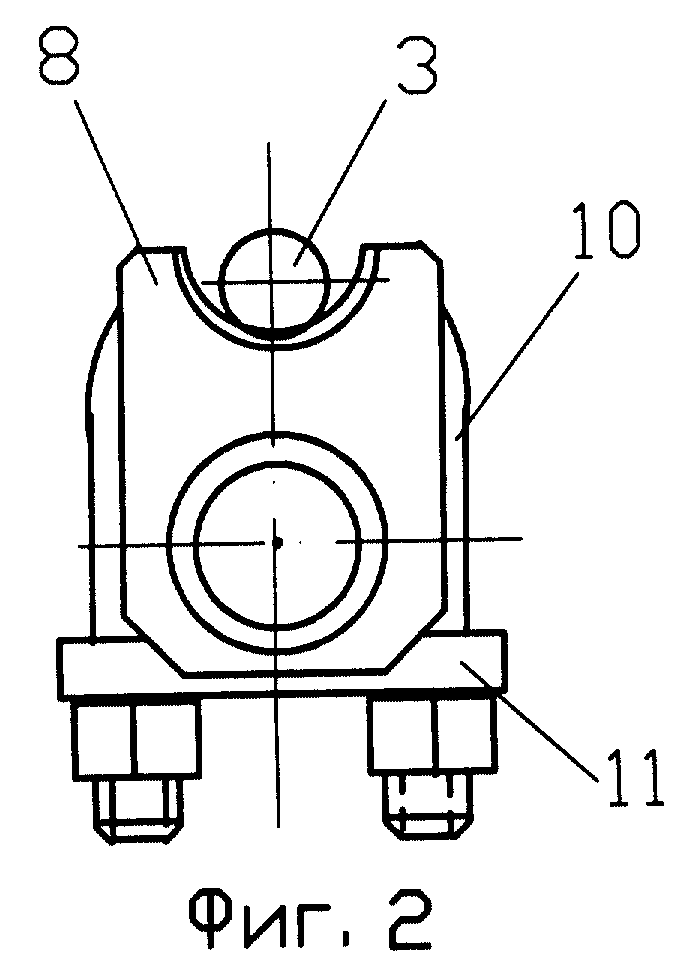
На фиг.1 представлен общий вид датчика натяжения гибкого органа, на фиг. 2 - вид датчика сбоку.
Датчик содержит упругий элемент 1 с внутренней цилиндрической полостью 2, гибкий орган 3, мембрану 4 с преобразователем механической величины в электрическую 5, жесткую консольную балку 6, упор 7, прижимно-прогибочное устройство, включающее в себя две стойки с вырезами овальной формы 8 для укладки гибкого органа 3, ложемент 9, скобу 10, пластину 11, цилиндрическая полость 2 упругого элемента с торцов герметично закрыта для защиты от механических воздействий и окружающей среды.
Датчик работает следующим образом.
Датчик устанавливается на гибком органе, например, на неподвижном конце талевого каната подъемника, применяемого при ремонте нефтяных и газовых скважин, или буровой установки, таким образом, чтобы гибкий орган 3 лег в углубление стоек 8. В данном случае гибкий орган является неподвижным, поэтому на концах упругого элемента 1 установлены стойки 8, так как нет необходимости устанавливать направляющие ролики. Скоба 10 прижимно-прогибочного устройства одевается на гибкий орган и упругий элемент и с помощью пластины 11 и гаек гибкий орган плотно прижимается к ложементу 9, установленному на упругом элементе 1. На установку датчика на гибкий орган требуется всего несколько минут. На гибком органе датчик удерживается прижимно-прогибочным устройством, которое в данном случае выполняет две функции:
- крепление датчика на гибком органе;
- осуществляет перегиб гибкого органа, для создания поперечной изгибающей силы, воздействующей на упругий элемент.
Упругий элемент 1 имеет внутреннюю цилиндрическую полость 2, с обоих торцов герметично закрываемую. Внутри полости с одной стороны упругого элемента закреплена мембрана 4 с полупроводниковым преобразователем 5 и защемленной жесткой балкой 6, а с другой стороны установлен упор 7, имеющий установочную наружную резьбу. Гибкий орган 3 перегибается благодаря стойкам 8 и скобе 10 прижимно-прогибочного устройства. Вследствие этого, натяжение гибкого органа 3 силой А создает силу 8, которая изгибает упругий элемент 1. Прогиб правого конца упругого элемента перемещает конец защемленной жесткой консольной балки 6 под действием упора 7, при этом жесткая консольная балка 6 не прогибается и воздействует на мембрану 4, вызывая ее деформацию. Одновременно с этим сама мембрана, закрепленная на упругом элементе 1 при прогибе его левого конца, перемещается таким образом, чтобы при натяжении гибкого органа, благодаря жесткой консольной балке 6, на нее действует суммарная сила, одна созданная прогибом правого конца упругого элемента, а вторая - левого. Мембрана 4 деформируется на величину, пропорциональную суммарному прогибу упругой балки. В этом случае деформация мембраны значительно увеличивается, а следовательно, увеличивается выходной сигнал. Таким образом чувствительность к измеряемой величине в предлагаемом датчике значительно увеличилась по сравнению с известным датчиком. Кроме того, в предлагаемом датчике применены в качестве преобразователей механических деформаций в электрическую величину полупроводниковые тензопреобразователи, имеющие более чем на два порядка большую чувствительность при значительно меньших габаритах и весе, по сравнению с индуктивными, что также приводит к повышению точности измерения величины натяжения гибкого органа и повышению надежности.
Датчик натяжения гибкого органа может быть использован как для измерения натяжения неподвижного, так и подвижного гибкого органа. При применении датчика для измерения натяжения подвижного гибкого органа необходимо устанавливать на устройстве его перегиба три направляющих ролика. В этом случае корпус датчика должен прикрепляться к корпусу лебедки. При применении датчика для измерения натяжения неподвижного гибкого органа, например, мертвого талевого конца подъемника типа А-50, в этом случае нет необходимости использовать ролики, которые удорожают датчик, необходимо применить прижимно-прогибочное устройство (ППУ).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК НАТЯЖЕНИЯ КАНАТА | 2006 |
|
RU2332648C1 |
| СИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ НЕПОДВИЖНОГО ГИБКОГО ОРГАНА | 2001 |
|
RU2188941C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2205375C1 |
| ДАТЧИК НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2002 |
|
RU2204815C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ | 2002 |
|
RU2209307C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2209963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ В СКВАЖИНЕ | 2001 |
|
RU2211921C1 |
| РЕГИСТРАТОР НАПРЯЖЕНИЯ ГИБКИХ СОЕДИНЕНИЙ | 2006 |
|
RU2410657C2 |
| ВЕСОВОЕ УСТРОЙСТВО К ГРУЗОПОДЪЕМНИКУ | 2002 |
|
RU2212023C1 |
| Полупроводниковый датчик давления | 1978 |
|
SU741076A1 |
Изобретение относится к измерительной технике, в частности к устройствам для измерения натяжений канатов, проволок, кабелей, тросов и т. д. Датчик содержит упругий элемент 1, две стойки 8 с вырезами для укладки гибкого органа 3, ложемент 9, скобу 10 для прижатия гибкого органа к ложементу. Упругий элемент 1 имеет внутреннюю цилиндрическую полость 2. На одном конце полости в поперечном сечении размещена мембрана 4 с жесткой консольной балкой 6 и преобразователем 5 механической величины. На другом конце цилиндрической полости 2 расположен упор 7, взаимодействующий с концом консольной балки 6. В качестве преобразователя может быть использован полупроводниковый тензочувствительный элемент. Технический результат: повышение чувствительности датчика и надежности функционирования. 2 з.п. ф-лы, 2 ил.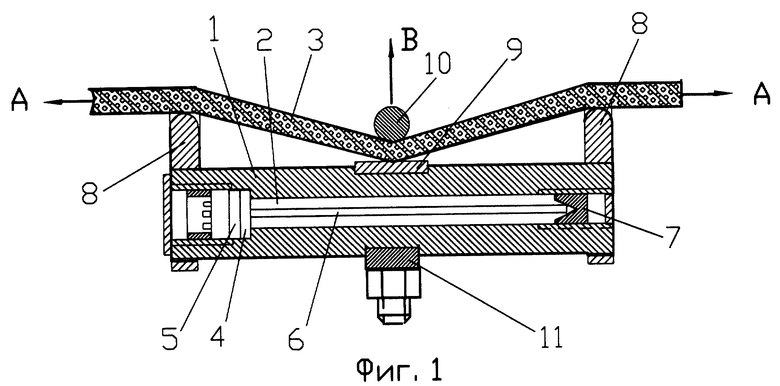
| Устройство для определения натяжения и коэффициента тангенциального сопротивления нити | 1990 |
|
SU1760404A1 |
| Преобразователь постоянного напряжения | 1982 |
|
SU1058018A1 |
| ЕР 802404 А, 22.10.1997. | |||

