Изобретение относится к измерительной технике и может быть использовано для определения натяжения неподвижного гибкого органа, например каната, на подъемниках, применяемых при текущем и капитальном ремонте скважин.
Известно устройство для измерения длины и натяжения гибкого органа, содержащее опорную раму, гидроцилиндр с плунжером, соединенный с индикатором усилия, три обводных ролика, один из которых укреплен на рычаге. (см. авт. свид. 977739, МКИ Е 21 В 47/00). Данное устройство позволяет измерять силу натяжения гибкого органа, однако это устройство натяжения каната имеет низкую точность.
Известно силоизмерительное устройство натяжения каната типа гидравлического индикатора веса (ГИВ), содержащее корпус со стойками, несущие ролики, средний ролик действует на мембрану, сжимающую жидкость, манометр, показывающий натяжение гибкого органа и зажим для крепления на гибком органе (См. кн. Технологические измерения и приборы. Исакович Р.Я. М.: Недра, 1970, стр.337-343).
Устройство позволяет измерять натяжение гибкого органа. Однако данное устройство обладает низкой точностью измерений и сложно в исполнении.
Известно силоизмерительное устройство для измерения натяжения неподвижного гибкого органа (Свидетельство на полезную модель 19088 от 08.02.2001).
В данном устройстве для прижимания гибкого органа с помощью прижимно-прогибочного устройства (ППУ) между гибким органом и упругой балкой установлен ложемент, а в качестве измерительного преобразователя использованы тензорезисторы, установление на упругой балке между прижимно-прогибочным устройством и стойкой в плоскости, параллельной плоскости нагрузки, стойки выполнены с вырезами овальной формы.
При установке известного устройства на гибкий орган, например канат, применяемый на подъемниках в нефтяной и газовой промышленности, пряди каната ложатся в овальные вырезы стоек. При ослаблении и последующем натяжении гибкого органа пряди могут повернуться и угол прогиба гибкого органа изменится, что приводит к погрешности измерения натяжения гибкого органа.
Изобретение направлено на повышение точности измерения натяжения гибкого органа, обеспечение удобства в эксплуатации.
Технический результат, опосредствующий решение указанной задачи, заключается в том, что, регулируя натяжение упругого элемента, достигают нулевой нагрузки на участке гибкого органа, расположенного параллельно упругому элементу, что позволит уменьшить погрешность и повысить точность измерения при любом температурном режиме, а беспроводная передача информации обеспечивает удобство в эксплуатации.
Указанный технический результат достигается тем, что в датчик натяжения гибкого органа, содержащий зажимы, удерживающие упругий элемент на гибком органе, жестко соединенный с преобразователем деформации, выход которого связан со входом формирователя выходного сигнала, дополнительно введена тяга, расположенная параллельно упругому элементу и имеющая с ним одинаковый температурный коэффициент линейного расширения, причем один конец тяги соединен с упругим элементом, а другой - со входом преобразователя деформации, внутри гибкого органа между зажимами установлен компенсатор натяжения. Преобразователь деформации выполнен в виде емкостных, индуктивных и других датчиков перемещения. Формирователь выходного сигнала выполнен в виде преобразователя напряжение/ток-частота или код или в виде преобразователя напряжение-ток/напряжение или в виде беспроводного передатчика сигнала, например радиопередатчика. Формирователь выходного сигнала содержит память, предназначенную для хранения данных, а также индикатор, предназначенный для индикации текущих значений натяжения гибкого органа. В качестве преобразователя деформации используют датчик силы типа С50. В качестве материала упругого элемента используют стали с высоким модулем Юнга.
На фиг.1 представлен общий вид датчика натяжения гибкого органа, на фиг. 2 представлен вид его сбоку.
Датчик содержит упругий элемент 1, расположенный на гибком органе 2 и удерживаемый на нем с помощью двух зажимов 3 и крепежных элементов 4, тягу 5, соединенную одним концом с упругим элементом 1, а другим - с преобразователем деформации 6, выход которого связан со входом формирователя выходного сигнала 7, внутри гибкого органа 2 между зажимами 3 расположен компенсатор натяжения 8, зажимы 3 выполнены с выступами 9 и пазами 10 (фиг.2).
Работает датчик следующим образом.
Датчик устанавливается на неподвижном конце гибкого органа 2 подъемника, применяемого при ремонте нефтяных и газовых скважин или буровой установки, следующим образом. Зажимы 3 предназначены для неподвижного закрепления и удержания на гибком органе 2 упругого элемента 1. Выполнены зажимы в виде, например, полухомутов с выступами 9 и пазами 10 для удобства установки и закрепления упругого элемента 1, охватывающих гибкий орган и скрепляемых между собой крепежными элементами 4 (например, болты, гайки, винты, шайбы и т.п.). Зажатие гибкого органа 2 должно быть плотным, чтобы зажимы 3 не могли перемещаться вдоль гибкого органа. Расстояние между зажимами 3 определяется длиной упругого элемента 1. После закрепления зажимов 3 на гибком органе 2 в пазы 10 выступов 9 вставляется упругий элемент 1, который закрепляется с помощью гайки 4 (см. фиг.2). Гайка 4 (фиг.2) на упругом элементе 1 затягивается до тех пор, чтобы участок гибкого органа 2 между зажимами 3 был не нагружен силой зажатия гайки 4. Внутри гибкого органа между зажимами 3 установлен компенсатор натяжения 8, который увеличивает диаметр гибкого органа. Компенсатор является упругим и может быть выполнен, например, из резины, пружины. В процессе измерения натяжения гибкого органа 2 зажимы 3 смещаются друг относительно друга вдоль гибкого органа. В этом случае при натяжении гибкого органа участок, расположенный между зажимами, практически не будет воспринимать нагрузку натяжения гибкого органа, а всю силу натяжения будет брать на себя упругий элемент 1, так как этот участок в данном случае может свободно вытягиваться за счет возможности уменьшения диаметра гибкого органа.
Такое исполнение устройства при работе дает возможность повысить точность измерения за счет исключения нагружения участка гибкого органа, находящегося между зажимами. Так как жесткость упругого элемента больше жесткости гибкого органа, то при натяжении гибкого органа всю его нагрузку воспринимает на себя упругий элемент 1. Упругий элемент 1, выполненный из материала, например стали 40х13, воспринимая силу натяжения гибкого органа, деформируется. Эти деформации воспринимаются тягой 5 и преобразовываются в пропорциональный усилию натяжения электрический сигнал с помощью преобразователя деформации 6. В качестве преобразователя деформации 6 применен интегральный тензопреобразователь силы серии "С", например С50. Корпус преобразователя 6 жестко прикреплен к торцу упругого элемента 1. На входе преобразователя 6 установлен свободный торец тяги 5. Под действием измеряемого усилия деформация (удлинение) упругого элемента 1 вызывает перемещение торца тяги 5, присоединенного к входу преобразователя 6. Воздействие тяги 5 на вход преобразователя 6 приводит к появлению выходного сигнала, пропорционального натяжению гибкого органа. Выходной сигнал преобразователя 6 поступает на вход формирователя выходного сигнала 7, который предназначен для получения на выходе преобразователя стандартного сигнала согласно ИСО и ГОСТ или сигнала, удобного для восприятия потребителем. Датчик натяжения гибкого органа подключается к любой аппаратуре при помощи устройства ввода-вывода, например при помощи герметичного разъема типа ШРГ.
Как правило, датчики натяжения гибкого органа работают при температуре окружающей среды, изменяющейся от минус 50 градусов С до плюс 50 градусов С. В этих условиях возникают погрешности измерения от температурного изменения размеров датчиков. Так, например, при изменении температуры окружающей среды от -50 градусов С до +50 градусов С упругий элемент из стали, имеющий начальную длину 150 мм, получает приращение длины 0,16 мм. Такой же порядок имеют приращения длины упругого элемента и от нагрузок гибкого органа. Поэтому в предлагаемом датчике для устранения температурной погрешности тяга 5, расположенная параллельно упругому элементу 1, имеет одинаковый с ним температурный коэффициент линейного расширения.
При эксплуатации датчиков натяжения гибкого органа часто бывает необходимость беспроводной передачи выходного сигнала, так как применение проводов создает неудобства при работе. В этом случае формирователь выходного сигнала включает в себя миниатюрные радиомодули для передачи цифровой информации типа CDP-TX-01 (см. журнал Радиолюбитель 9, стр.43 и 11, стр.39 за 1996 г.).
В других ситуациях, наоборот, нет необходимости передавать информацию на расстояние. В этом случае формирователь выходного сигнала включает в себя индикатор, который предназначен для индикации нагрузок в гибком органе на месте его эксплуатации. Индикатор представляет собой блок, выполненный на базе знакосинтезирующих светодиодных индикаторов.
Для регистрации информации об усилиях, возникающих в гибком органе в процессе его работы с целью дальнейшего анализа и контроля, формирователь выходного сигнала включает в себя FLASH-память с энергонезависимым питанием типа PA28F008SA фирмы Intel. Для переноса информации из датчика к нему подключается переносный блок памяти или ноутбук.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИЛОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ НЕПОДВИЖНОГО ГИБКОГО ОРГАНА | 2001 |
|
RU2188941C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2205375C1 |
| ДАТЧИК НАТЯЖЕНИЯ КАНАТА | 2006 |
|
RU2332648C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2209963C1 |
| ДАТЧИК НАТЯЖЕНИЯ ГИБКОГО ОРГАНА | 2001 |
|
RU2195637C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ | 2002 |
|
RU2209307C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЛИНЫ КОЛОННЫ ТРУБ ПРИ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЯХ В СКВАЖИНЕ | 2001 |
|
RU2211921C1 |
| ВЕСОВОЕ УСТРОЙСТВО К ГРУЗОПОДЪЕМНИКУ | 2002 |
|
RU2212023C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТНО-СИЛОВЫХ ХАРАКТЕРИСТИК ЧЕЛОВЕКА | 2002 |
|
RU2218962C1 |
| ПЕШЕХОДНЫЙ СВЕТОФОР | 2007 |
|
RU2335019C1 |
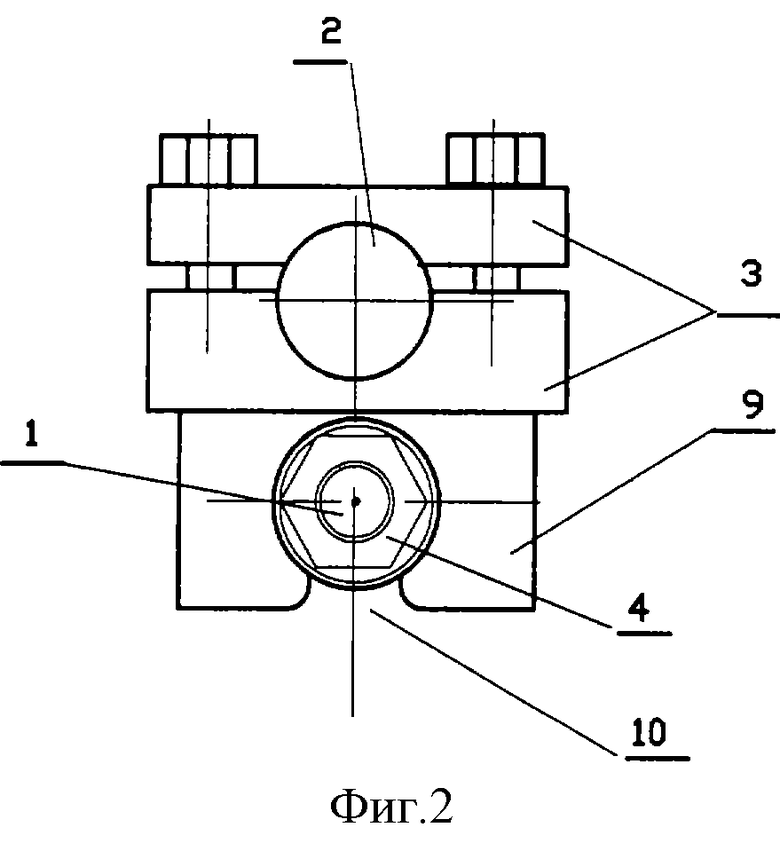
Изобретение относится к измерительной технике. Датчик содержит: упругий элемент 1, зажимы 3, удерживающие упругий элемент 1 на гибком органе 2, тягу 5, расположенную параллельно упругому элементу 1 и имеющую с ним одинаковый температурный коэффициент линейного расширения. Один конец тяги 5 соединен с упругим элементом 1, а другой - со входом преобразователя деформации 6. Внутри гибкого органа 2 между зажимами установлен компенсатор натяжения 8. Технический результат - повышение точности измерений. 8 з.п.ф-лы, 2 ил.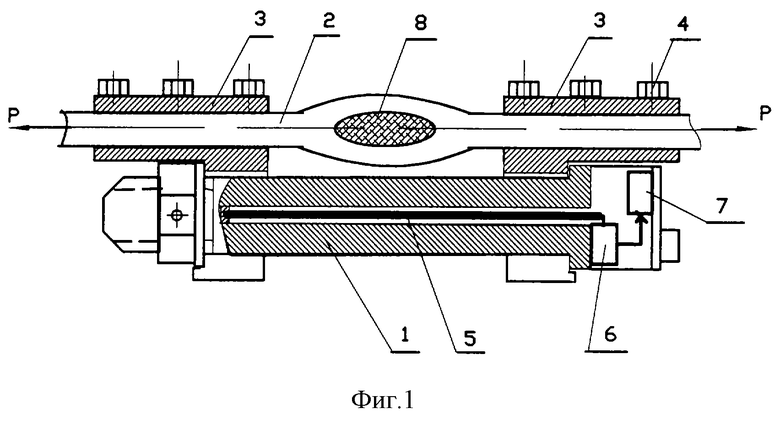
| Штриховальный прибор | 1929 |
|
SU19088A1 |
| Устройство для измерения длины и натяжения кабеля | 1981 |
|
SU977739A1 |
| Динамометр для измерения усилий в тросах | 1960 |
|
SU139131A1 |
| US 3436962 A, 08.04.1969. | |||

