Изобретение относится к сфере морских и речных коммуникаций и предназначено для обеспечения портов, судоходных каналов, водных путей рек, озер и морей, а также судоводителей, надежным навигационным средством, позволяющим в любое время суток и при различных погодных условиях осуществлять проводку судов в сложных навигационных условиях.
Заявителю известен аналог заявляемого изобретения как наиболее близкий ему по совокупности существенных признаков, а именно:
«Способ проводки речных и морских судов по заданной траектории», защищенный патентом РФ в 2006 году, который состоит в том, что створный лазерный маяк формирует в пространстве три трехмерные области, заполненные лазерным излучением, позволяющие визуально оценить знак и степень бокового уклонения движущегося объекта от осевой линии судового хода (фарватера) (RU 2302357 С2, МПК В63В 51/02 (2006.01)).
Недостатком данного способа является отсутствие инструментальных средств обработки принимаемых оптических сигналов и, как следствие, отсутствие у судоводителя точных данных (абсолютных величин) по смещению судна от осевой линии фарватера и расстоянию до берега. Кроме того, для подачи (приведения) судна в зону действия лазерного створного маяка необходимо использовать иные навигационные средства, не интегрированные в едином комплексе с лазерным маяком.
Задачами, на решение которых направлено изобретение, являются:
1) вывод судна на исходную позицию в зону действия створного лазерного маяка для дальнейшей проводки по строго заданному курсу;
2) обеспечение судоводителя информацией о величине линейного смещения судна от осевой линии фарватера, при одновременном определении расстояния до маяка, с целью удержания судна на осевой линии с заданной точностью на всем протяжении судового хода;
3) обеспечение судоводителя комфортными условиями управления судном в сложной навигационной обстановке за счет инструментального анализа и комплексной оценки информации, получаемой одновременно от двух источников, исключающими возможные ошибки оператора при одном лишь визуальном способе ориентирования.
Указанные задачи достигаются тем, что на этапе движения судна к зоне действия створного лазерного маяка основную информацию судоводитель получает от спутниковой навигационной системы ГЛОНАСС/NAVSTAR (фиг.1, п.4). Проводка судна по осевой линии судового хода (по фарватеру) осуществляется с помощью оптической составляющей интегрированной наземно-спутниковой навигационной системы на базе створного лазерного маяка (фиг.1; п.1, 2). Последний не только формирует три трехмерные области, заполненные лазерным излучением, позволяющие визуально оценить знак и степень отклонения движущегося объекта от заданной траектории, но и выдает оптические сигналы, которые содержат информацию о номере излучателя маяка и угловом положении лазерных лучей в азимутальной плоскости. Бортовой или мобильный приемники оптических сигналов, устанавливаемые на судне (3) и снабженные вычислителем, выдают на экран дисплея точную величину бокового уклонения х судна от заданного курса и величину расстояния до створного маяка l на основе полученных данных об угловом положении в азимутальной плоскости лазерных лучей α1 и α2 и номере излучателя лазерного маяка. В едином интегрированном вычислителе (комплексе), одновременно с обработкой информации, поступающей от приемника оптических сигналов, обрабатывается информация, выдаваемая приемником спутниковой навигации ГЛОНАСС/NAVSTAR. Инструментальный анализ и комплексная оценка информации, поступающей от двух источников, обеспечивают судоводителя точными данными, позволяющими в любое время суток и при различных погодных условиях осуществлять проводку судов в сложных навигационных условиях. В случае же выхода из строя одной из составляющих интегрированной наземно-спутниковой навигационной системы (отказ или радиотехническое подавление системы ГЛОНАСС/NAVSTAR, например) проводку судна обеспечивает оптическая составляющая системы, и наоборот.
Применение данного способа позволяет:
Выводить судно в зону действия створного лазерного маяка с помощью спутниковой навигационной системы ГЛОНАСС/NAVSTAR с точностью до одного метра в дифференциальном режиме приема.
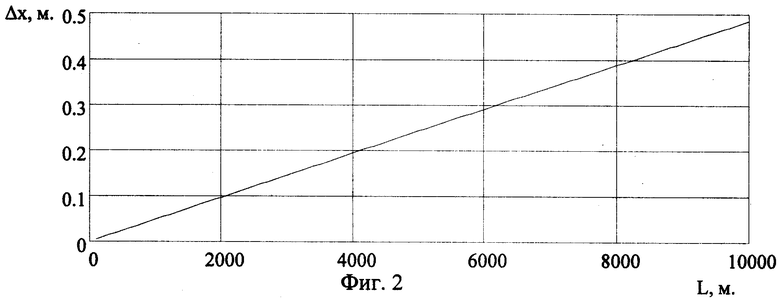
Определять величину бокового уклонения х судна от оси фарватера с точностью не хуже ±1 м. При этом погрешность измерения Δх убывает по мере приближения к берегу (фиг.2).
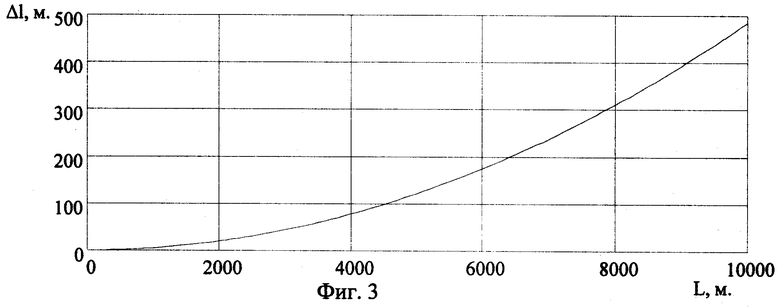
Определять расстояние до маяка (берега). Максимальная погрешность определения дальности на расстоянии 10 км от берега не превышает ±400 м и также убывает по мере приближения к берегу (фиг.3).
Инструментальный анализ и комплексная оценка информации, получаемой одновременно от двух источников, исключают возможные ошибки оператора при одном лишь визуальном способе ориентирования и позволяют фиксировать маршрут судна с помощью какого-либо пишущего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВОДКИ МОРСКИХ И РЕЧНЫХ СУДОВ ПО ЗАДАННОМУ КУРСУ | 2009 |
|
RU2491204C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ОРИЕНТИРОВАНИЯ СУДОВ | 2009 |
|
RU2392174C1 |
| СПОСОБ ПРОВОДКИ РЕЧНЫХ И МОРСКИХ СУДОВ ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2005 |
|
RU2302357C2 |
| СПОСОБ ПРОВОДКИ МОРСКИХ И РЕЧНЫХ СУДОВ ПО ЗАДАННОМУ КУРСУ | 2013 |
|
RU2556309C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЗОН ОРИЕНТИРОВАНИЯ С ПОМОЩЬЮ ЛАЗЕРНОГО СТВОРНОГО МАЯКА | 2008 |
|
RU2354580C1 |
| Способ формирования зон ориентирования и способ формирования зон для обозначения границ полосы безопасного движения с помощью лазерного створного маяка при проводке речных и морских судов | 2020 |
|
RU2738645C1 |
| Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья | 2015 |
|
RU2618666C2 |
| Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья | 2015 |
|
RU2620289C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ПРОВОДКИ БЕСПИЛОТНОГО ГИДРОСАМОЛЁТА НА АКВАТОРИИ ЛЁТНОГО БАССЕЙНА | 2018 |
|
RU2705475C1 |
Изобретение относится к сфере морских и речных коммуникаций. Способ проводки морских и речных судов по заданному курсу заключается в одновременном совместном использовании оптических сигналов от створного лазерного маяка и навигационной информации от спутниковой навигационной системы для проводки судна как на этапе приближения к пункту назначения, так и при проводке его по фарватеру. При этом створный лазерный маяк формирует в пространстве три трехмерные области, заполненные лазерным излучением и служащие для указания точного курса и оценки знака и степени бокового уклонения движущегося объекта от фарватера. Технический результат обеспечивает возможность осуществлять проводку судов в сложных навигационных условиях и исключение возможных ошибок оператора при одном лишь визуальном ориентировании. 3 з.п. ф-лы, 3 ил.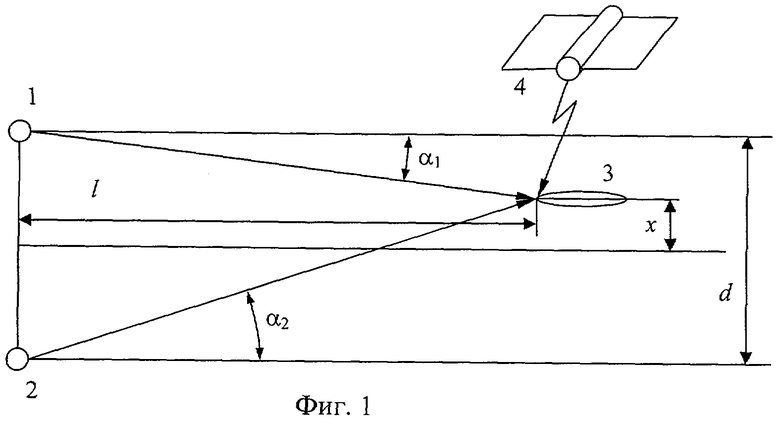
1. Способ проводки морских и речных судов по заданному курсу, заключающийся в том, что створный лазерный маяк формирует в пространстве три трехмерные области, заполненные лазерным излучением и служащие для указания точного курса и оценки знака и степени бокового уклонения движущегося объекта от осевой линии судового хода (фарватера), отличающийся одновременным совместным использованием оптических сигналов от створного лазерного маяка и навигационной информации от спутниковой навигационной системы для проводки судна как на этапе приближения к пункту назначения, так и при проводке его по осевой линии судового хода (по фарватеру).
2. Способ по п.1, отличающийся тем, что оптические сигналы содержат информацию о номере излучателя маяка и угловом положении лазерных лучей в азимутальной плоскости.
3. Способ по п.1, отличающийся тем, что бортовой или мобильный приемники оптических сигналов, устанавливаемые на судне и снабженные вычислителем, выдают на экран дисплея, величину бокового уклонения судна от осевой линии судового хода (фарватера) и величину расстояния до створного маяка на основе полученных данных об угловом положении лазерных лучей в азимутальной плоскости и номере излучателя лазерного маяка.
4. Способ по п.1, отличающийся тем, что в едином интегрированном вычислителе (комплексе), одновременно с обработкой информации, поступающей от приемника оптических сигналов, обрабатывается информация, выдаваемая приемником спутниковой навигации ГЛОНАСС/NAVSTAR и отображается на экране того же монитора.
| СПОСОБ ПРОВОДКИ РЕЧНЫХ И МОРСКИХ СУДОВ ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2005 |
|
RU2302357C2 |
| СПОСОБ ОРИЕНТИРОВАНИЯ В ПРОСТРАНСТВЕ ДВИЖУЩЕГОСЯ ТРАНСПОРТА ПО СВЕТОВОМУ ЛУЧУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2322371C2 |
| Способ ориентирования объекта по световому лучу | 1988 |
|
SU1561432A1 |
| SU 1420816 А1, 15.10.1993 | |||
| US 3698816 А, 17.10.1972. | |||

