Изобретение относится к области навигации и предназначено для обеспечения портов, судоходных каналов, водных путей рек, озер и морей надежным навигационным средством, позволяющим осуществлять автоматическую проводку судов в сложных навигационных условиях.
Известны способы навигации подвижных объектов (патенты РФ №2302357, №2411159, патент США 3698816), которые обеспечивают проводку речных и морских судов по заданной траектории. Недостатком указанных способов является высокая зависимость безопасности проводки судов от гидрометеорологических условий и помеховой радиолокационной обстановки.
Наиболее близким к заявленному способу по техническому решению является изобретение по патенту РФ №2411159, заключающееся в том, что в едином интегрированном вычислителе, одновременно с обработкой информации, поступающей от приемника оптических сигналов, обрабатывается информация, выдаваемая спутниковой навигационной системой ГЛОНАСС/NAVSTAR.
Недостатком прототипа является низкая точность определения местоположения судна на фарватере в условиях отказа или радиотехнического подавления спутниковой навигационной системы ГЛОHACC/NAVSTAR.
Целью изобретения является коррекция собственных координат морских и речных судов, позволяющая снизить погрешность при его автоматической проводке по заданному курсу.
Техническим результатом предлагаемого изобретения является повышение безопасности проводки морских и речных судов по заданному курсу, в том числе в условиях отказа или радиотехнического подавления спутниковой навигационной системы ГЛОНАСС/NAVSTAR.
Предлагаемый способ проводки морских и речных судов по заданному курсу (фиг.1), заключается в использовании судоводителем 1 единого интегрированного вычислителя для одновременной обработки оптических сигналов от створного маяка 2, навигационной информации от спутниковой навигационной системы ГЛОНАСС/NAVSTAR 3 и навигационной информации от береговой радиолокационной станции 4, получаемой от створного маяка 2, оборудованного средствами связи с береговой радиолокационной станцией 4, излучающего оптический сигнал, дополнительно содержащий информацию о координатах и параметрах движения как судоводителя 1, так и других судов, движущихся по фарватеру, полученную от береговой радиолокационной станции. В едином интегрированном вычислителе судоводителя 1 одновременно обработанная информация от приемника спутниковой навигационной системы ГЛОНАСС/NAVSTAR, приемника оптических сигналов, в том числе навигационной информации от береговой радиолокационной станции, отображают на экране одного и того же монитора для визуального указания судоводителю 1 точного курса и оценки знака и степени бокового отклонения судна от осевой линии судового хода и предотвращения столкновения с другими судами.
Реализация предложенного способа может быть осуществлена с использованием известных навигационных радиолокационных станций (например, НРЛС «Река») и светодиодных светосигнальных приборов направленного действия (например, фонарей для створных знаков LS-100, LO-200, ЭСПН-140СД), доработанных для передачи информации. Для этого достаточно в передающую часть фонарей створных знаков добавить систему модуляции передаваемых сигналов по амплитуде с некоторой частотой, например, 50 кГц, лежащей в полосе пропускания светодиодов и для передачи информации использовать стандартные методы амплитудной или фазовой манипуляции. На приемной стороне устанавливается фотоприемник с фотодиодом и стандартной схемой амплитудной или фазовой демодуляции. В этом случае для судоводителя будет сформировано сообщение о координатах судна, боковом отклонении судна от осевой линии судового хода и расстоянии от створного маяка с указанием его номера или координат, позволяющее повысить безопасность автоматической проводки морских и речных судов в сложных навигационных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВОДКИ МОРСКИХ И РЕЧНЫХ СУДОВ ПО ЗАДАННОМУ КУРСУ | 2009 |
|
RU2411159C1 |
| СПОСОБ ПРОВОДКИ МОРСКИХ И РЕЧНЫХ СУДОВ ПО ЗАДАННОМУ КУРСУ | 2009 |
|
RU2491204C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ОРИЕНТИРОВАНИЯ СУДОВ | 2009 |
|
RU2392174C1 |
| СПОСОБ ПРОВОДКИ РЕЧНЫХ И МОРСКИХ СУДОВ ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2005 |
|
RU2302357C2 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2001 |
|
RU2207585C2 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЗОН ОРИЕНТИРОВАНИЯ С ПОМОЩЬЮ ЛАЗЕРНОГО СТВОРНОГО МАЯКА | 2008 |
|
RU2354580C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
Изобретение относится к области навигации и предназначено для обеспечения портов, судоходных каналов, водных путей рек, озер и морей надежным навигационным средством, позволяющим осуществлять автоматическую проводку судов в сложных навигационных условиях. Техническим результатом предлагаемого изобретения является повышение безопасности проводки морских и речных судов по заданному курсу, в том числе в условиях отказа или радиотехнического подавления спутниковой навигационной системы ГЛОНАСС/NAVSTAR. Для достижения данного результата в едином интегрированном вычислителе одновременно с информацией от существующих систем навигации обрабатывается информация от береговой радиолокационной станции, получаемая от створного маяка, оборудованного средствами связи с береговой радиолокационной станцией, излучающего оптический сигнал, дополнительно содержащий информацию о координатах и параметрах движения как судоводителя, так и других судов, движущихся по фарватеру, полученную от береговой радиолокационной станции. 1 з.п. ф-лы, 1 ил.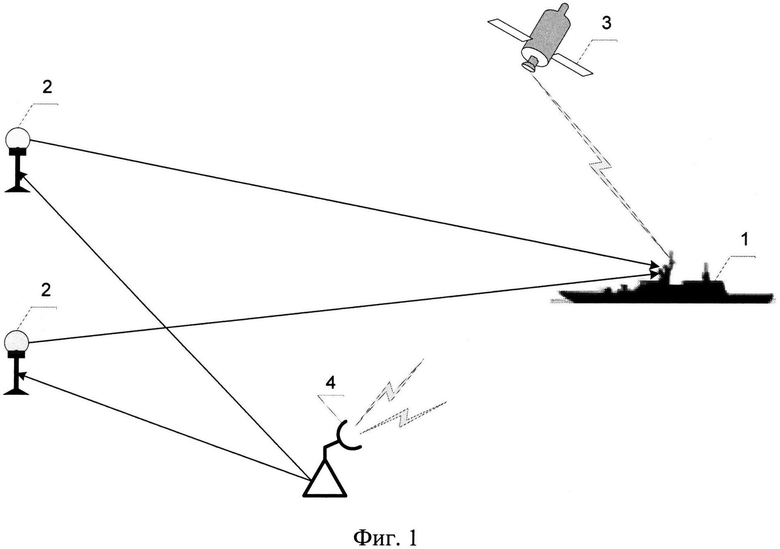
1. Способ проводки морских и речных судов по заданному курсу, заключающийся в использовании единого интегрированного вычислителя для одновременной обработки оптических сигналов от створного маяка, навигационной информации от спутниковой навигационной системы ГЛОНАСС/NAVSTAR, отличающийся тем, что одновременно с существующими системами навигации используют информацию от береговой радиолокационной станции, получаемую судоводителем от створного маяка, оборудованного средствами связи с береговой радиолокационной станцией.
2. Способ по п.1, отличающийся тем, что излучаемый створным маяком оптический сигнал дополнительно содержит информацию о координатах и параметрах движения, как судоводителя, так и других судов, движущихся по фарватеру, полученную от береговой радиолокационной станции.
| СПОСОБ ПРОВОДКИ МОРСКИХ И РЕЧНЫХ СУДОВ ПО ЗАДАННОМУ КУРСУ | 2009 |
|
RU2411159C1 |
| ДРАЧЁВ В.Н | |||
| Планирование перехода | |||
| Владивосток: Мор.гос | |||
| ун-т, 2007 | |||
| с | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Способ нанесения рисунка на поверхность мягких кожтоваров | 1956 |
|
SU107124A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2011 |
|
RU2463205C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2008 |
|
RU2381140C1 |

