Изобретение относится к сфере речных и морских коммуникаций и предназначено для обеспечения портов, судоходных каналов, водных путей рек, озер и морей надежным навигационным средством, позволяющим в любое время суток и при различных погодных условиях осуществлять проводку судов в сложных навигационных условиях.
Заявителю известен аналог заявляемого изобретения как наиболее близкий ему по совокупности существенных признаков, а именно:
"Оптическая система ориентирования судов", защищенная Авторским свидетельством СССР №1564922, 11.02.1988, содержащая расположенные на берегу первый и второй лазерные маяки и расположенные на борту судна блоки приема оптических сигналов и определения местоположения судна.
(SU 1564922 А1, МПК B64F 1/18 (11.02.88))
Недостаток данной системы ориентирования заключается в том, что она лишь «формирует сигналы, характеризующие сторону и величину углов отклонения судна от оси сигнальной зоны», в то время как при проводке судна необходимо знать величину линейного смещения судна от осевой линии фарватера.
Задачами, на решение которых направлено изобретение, являются: 1) обеспечение судоводителя точной информацией о величине линейного смещения судна от осевой линии фарватера, при одновременном определении дальности до маяка, с целью удержания судна на фарватере с заданной точностью на всем протяжении судового хода; 2) обеспечение судоводителя комфортными условиями управления судном, исключающими возможные ошибки оператора при визуальном способе ориентирования.
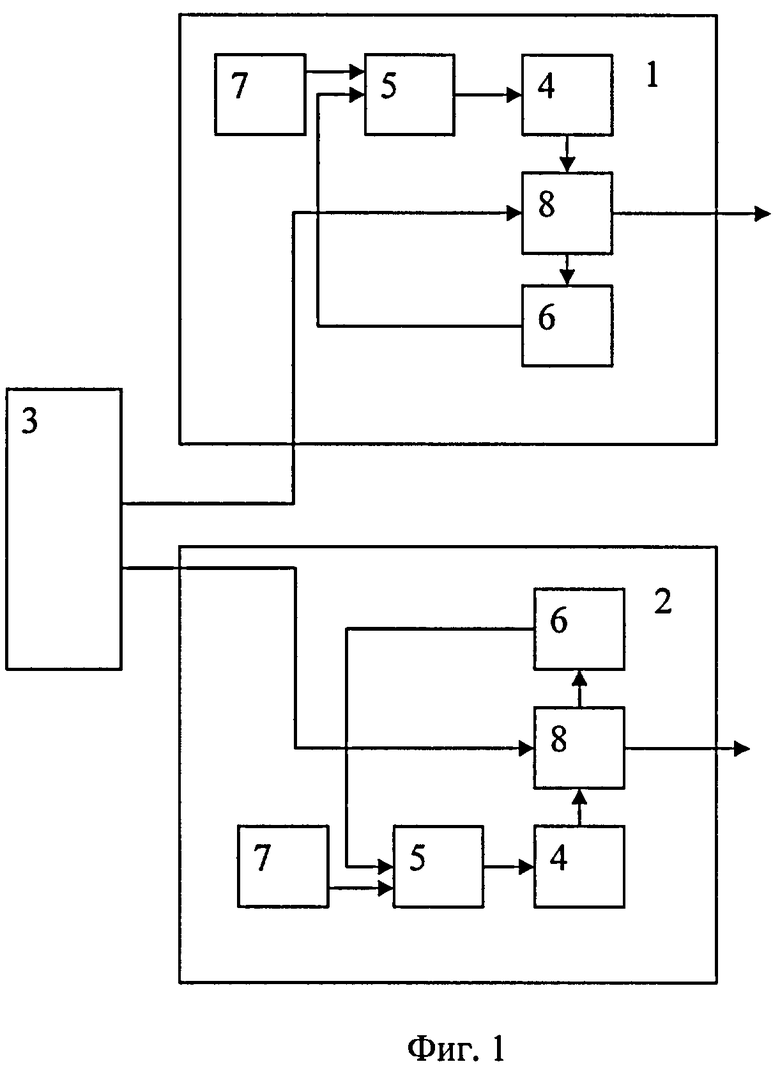
Предлагаемая оптическая система ориентирования судов (фиг.1) состоит из первого (1) и второго (2) лазерных маяков, управляемых блоком сканирования лазерных лучей (3). Каждый маяк имеет в своем составе последовательно соединенные дефлектор (8), датчик углового положения лазерного луча (6), модулятор (5) и лазерный излучатель (4). Второй вход модулятора (5) соединен с датчиком номера лазерного маяка (7).
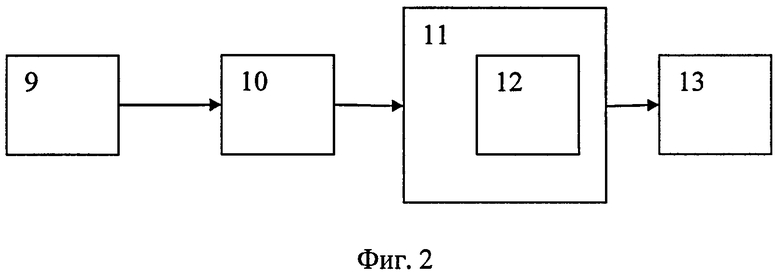
На судне устанавливается мобильная приемная часть системы ориентирования (фиг.2), содержащая оптическую антенну (9) и последовательно соединенные блок приема оптических сигналов (10), блок определения местоположения судна (11), содержащий вычислитель (12), и индикатор (13).
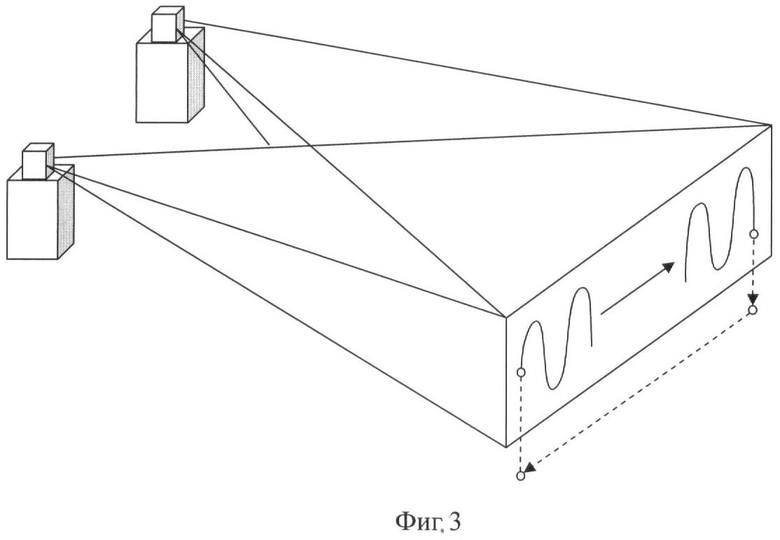
Оптическая система ориентирования судов функционирует следующим образом. Сигнальная зона системы формируется развернутыми по вертикали лазерными лучами, синхронно сканирующими в азимутальной плоскости по заданному закону (фиг.3).
Информация об угловом положении сканирующего луча от датчика (6) и номере маяка от датчика (7) поступает в модулятор (5) излучателя (4). Модулированный лазерный луч отклоняется дефлектором (8) по заданному закону в азимутальной плоскости. Управление работой маяков осуществляет блок сканирования лучей (3).
Модулированное излучение лазерных маяков, содержащее информацию об угловом положении лазерного луча в азимутальной плоскости в каждый момент времени и номере маяка, поступает в оптическую антенну (9), далее в блок приема оптических сигналов (10), где детектируется, селектируется и преобразуется в электрические сигналы. Информация об угловом положении лазерных лучей и номере маяков обрабатывается в блоке определения местоположения судна (11). На основе полученной информации в вычислителе (12) производится определение величины и знака бокового уклонения судна от оси створа - x(м) и расстояния до маяка - l(м) (фиг.4). Результаты обработки информации выводятся на индикатор (13), а также могут использоваться для автоматизации управления судном и в иных системах навигационного обеспечения судна.
Техническим результатом изобретения являются: обеспечение судоводителя информацией о величине линейного смещения судна от осевой линии фарватера с точностью плюс-минус 3…5 м на протяжении всего судового хода; обеспечение судоводителя информацией о расстоянии до лазерного створа, которое может составлять от нескольких десятков метров до нескольких километров; обеспечение судоводителя комфортными условиями управления судном, исключающими возможные ошибки оператора при визуальном способе ориентирования; возможность автоматизации процесса управления судном; возможность сопряжения данной системы с иными навигационными системами, в том числе, спутниковыми - Глонасс, GPS.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВОДКИ МОРСКИХ И РЕЧНЫХ СУДОВ ПО ЗАДАННОМУ КУРСУ | 2009 |
|
RU2491204C1 |
| СПОСОБ ПРОВОДКИ РЕЧНЫХ И МОРСКИХ СУДОВ ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2005 |
|
RU2302357C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЗОН ОРИЕНТИРОВАНИЯ С ПОМОЩЬЮ ЛАЗЕРНОГО СТВОРНОГО МАЯКА | 2008 |
|
RU2354580C1 |
| Способ формирования зон ориентирования и способ формирования зон для обозначения границ полосы безопасного движения с помощью лазерного створного маяка при проводке речных и морских судов | 2020 |
|
RU2738645C1 |
| СПОСОБ ПРОВОДКИ МОРСКИХ И РЕЧНЫХ СУДОВ ПО ЗАДАННОМУ КУРСУ | 2009 |
|
RU2411159C1 |
| Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья | 2015 |
|
RU2618666C2 |
| Способ наведения самоходной плавающей десантной техники на десантно-доступные районы побережья | 2015 |
|
RU2620289C2 |
| СПОСОБ ПРОВОДКИ МОРСКИХ И РЕЧНЫХ СУДОВ ПО ЗАДАННОМУ КУРСУ | 2013 |
|
RU2556309C2 |
| ЛАЗЕРНЫЙ МАЯК | 2002 |
|
RU2248299C2 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |

Изобретение относится к области речных и морских коммуникаций и предназначено для обеспечения портов, судоходных каналов, водных путей рек, озер и морей надежным навигационным средством, позволяющим в любое время суток и при различных погодных условиях осуществлять проводку судов в сложных навигационных условиях. Система состоит из двух лазерных маяков и блока управления (сканирования лазерных лучей). Каждый маяк имеет в своем составе лазерный излучатель, модулятор, датчик углового положения лазерного луча, датчик номера лазерного маяка и дефлектор. На судне устанавливается мобильная приемная часть системы ориентирования, содержащая оптическую антенну и последовательно соединенные блок приема оптических сигналов, блок определения местоположения судна с вычислителем и индикатор. Система позволяет определять величину и знак линейного смещения судна от осевой линии фарватера, а также дальность до лазерного маяка на основе данных об угловом положении в горизонтальной плоскости лазерных лучей и номере лазерного маяка, содержащихся в модулированных лазерных лучах. При этом снижается роль человеческого фактора при визуальном способе ориентирования. Техническим результатом изобретения являются: обеспечение судоводителя информацией о точной величине линейного смещения судна от осевой линии фарватера протяжении всего судового хода и информацией о расстоянии до лазерного створа, которое может составлять от нескольких десятков метров до нескольких километров, а также предоставление судоводителю комфортных условий управления судном, исключающих возможные ошибки оператора при визуальном способе ориентирования. Кроме того, обеспечиваются возможности автоматизации процесса управления судном и сопряжения данной системы с иными навигационными системами, в том числе спутниковыми - Глонасс, GPS. 1 з.п. ф-лы, 4 ил.
1. Оптическая система ориентирования судов, имеющая в своем составе установленные на берегу первый и второй лазерные маяки, содержащие последовательно соединенные лазерные излучатели, оптические модуляторы и дефлекторы, и блок управления маяками (блок сканирования лучей), и установленный на судне мобильный приемник оптических сигналов, содержащий последовательно соединенные оптическую антенну, блок приема оптических сигналов, блок определения местоположения судна и индикатор принятого сигнала, отличающаяся тем, что лазерные маяки содержат датчики углового положения лазерного луча в азимутальной плоскости и датчики номера лазерного маяка, выходы которых соединены с модулятором лазерного луча.
2. Оптическая система ориентирования судов по п.1, отличающаяся тем, что приемник оптических сигналов содержит вычислитель, осуществляющий определение величины и знака линейного смещения судна от осевой линии фарватера, а также дальности до лазерного маяка на основе данных об угловом положении в горизонтальной плоскости лазерных лучей и номера лазерного маяка, содержащихся в модулированных лазерных лучах.
| СПОСОБ ОРИЕНТИРОВАНИЯ В ПРОСТРАНСТВЕ ДВИЖУЩЕГОСЯ ТРАНСПОРТА ПО СВЕТОВОМУ ЛУЧУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2322371C2 |
| Способ ориентирования объекта по световому лучу | 1988 |
|
SU1561432A1 |
| SU 1420816 A1, 15.10.1993 | |||
| Лазерная система ориентирования объекта | 1985 |
|
SU1287451A1 |
| ЛАЗЕРНЫЙ МАЯК | 2002 |
|
RU2248299C2 |

