Изобретение относится к намоточному устройству для намотки полос, в частности тонких металлических полос, содержащему намоточный барабан, расположенный с возможностью вращения вокруг оси вращения, а так же по меньшей мере один качающийся рычаг, расположенный с возможностью поворота вокруг оси, и по меньшей мере один направляющий щит и по меньшей мере один прижимной ролик для направления или соответственно прижатия наматываемой полосы, при этом по меньшей мере один прижимной ролик снабжен по меньшей мере одним приводным средством для перемещения прижимного ролика относительно качающегося рычага.
Из уровня техники известны намоточные устройства такого типа. Для намотки металлической полосы используется ряд моталок, которые подающим устройством захватывают металлическую полосу, после того, как она покидает чистовую линию клетей и транспортируется отводящим рольгангом, чтобы отвести ее в мотальный приямок (шахту) и направить на намоточный барабан. Чтобы смотать металлическую полосу в рулон, вокруг намоточного барабана расположены качающиеся рычаги, которые направляют металлическую полосу вплотную вокруг намоточного барабана. Качающиеся рычаги выполнены по существу вместе с прижимным роликом и направляющим щитом. Используемые обычно моталки имеют по меньшей мере три или четыре качающихся рычага.
Намоточные устройства вышеназванного типа раскрыты в патентных публикациях US 4964587, EP 0963932A2 и US 5275345. Аналогичные решения содержатся также в патентных документах GB 2092111 A, US 3602448 и DE 202006016209 U1.
В моталках первого поколения качающиеся рычаги приводились в движение посредством пневмоцилиндров, и, кроме того, прижимные ролики были подпружинены, так что они могли уклоняться от перепада в намотке, то есть уступа, возникавшего за счет торца переднего конца очередной наматываемой полосы.
В противоположность им, сейчас гидравлическая моталка обычной конструкции избегает перепада в намотке за счет устройства слежения торца переднего конца сматываемой полосы и гидравлического блока управления. Это осуществляется таким образом, что рассчитывается положение торца полосы, и гидроцилиндр поднимает с металлической полосы качающийся рычаг вместе с неподвижным прижимным роликом и таким образом избегает перепада в намотке. После того как перепад в намотке пропускает ролик, прижимной ролик вновь устанавливают на верхний виток. Это повторяется со всеми качающимися рычагами; описанный метод известен также под названием “step control”.
Используемые с этой целью гидравлические блоки управления высоко динамичны и в целом соответствуют своему назначению. Тем не менее, трудно достаточно быстро набрать скорость и затормозить тяжелые качающиеся рычаги, что объясняется относительно высоким моментом инерции масс качающихся рычагов.
Разумеется, точное управление качающимися рычагами, как это требуется в частности для тонких металлических полос, возможно при этом лишь с учетом количества движения и допусков. Точный, высокочувствительный технологический режим мог бы обеспечить то преимущество, что тонкая металлическая полоса не имела бы или имела бы лишь незначительные повреждения.
Поэтому задача изобретения состоит в усовершенствовании намоточного устройства вышеназванного типа таким образом, что оно обеспечивает точную намотку также очень тонких полос, причем позволяет сматывать их в щадящем режиме.
Эта задача решается согласно изобретению тем, что прижимной ролик и качающийся рычаг или их приводы имеют систему измерения пути.
Изобретение делает упор среди прочего на то, что существенным для определения местоположения по меньшей мере одного прижимного ролика является не только положение качающегося рычага, но что сам прижимной ролик может перемещаться в свою очередь относительно качающегося рычага. При этом необходимо лишь незначительное количество движения, что позволяет осуществить динамическое позиционирование прижимного ролика. Предусмотренная также комплектация упомянутыми системами измерения пути делает возможным изложенный в дальнейшем описании технологический процесс.
При этом приводное средство может предпочтительно по меньшей мере существенно перемещать прижимной ролик в направлении центра намоточного барабана. Соответственно, прижимной ролик перемещается настолько, что осуществляет перпендикулярно возможное давление на полосу.
Прижимной ролик может быть расположен на качающемся рычаге ролика, который установлен в качающемся рычаге, при этом ось качающегося рычага и ось качающегося рычага ролика расположены параллельно одна другой. Соответственно, значит качающийся рычаг установлен в качающемся рычаге. Однако альтернативно прижимной ролик может быть расположен также на линейном исполнительном механизме, который закреплен на качающемся рычаге. В этом случае прижимной ролик перемещается, следовательно, прямолинейно относительно качающегося рычага. Представляется возможной также комбинация обоих решений (возвратно-вращательное движение и прямолинейное движение).
Приводное средство для движения прижимного ролика может быть установлено в самом качающемся рычаге. Оно может быть выполнено как гидравлическая или пневматическая поршневая система. В то же время допустимы также решения, которые предусматривают, например, механическое приводное средство.
В большинстве случаев несколько качающихся рычагов, преимущественно три или четыре качающихся рычага, взаимодействуют с намоточным барабаном. При этом по меньшей мере один качающийся рычаг может перемещаться посредством одного приводного элемента, причем также здесь используются преимущественно гидравлические или пневматические системы.
Полезным оказался также расположенный на качающемся рычаге упор для прижимного ролика. В частности, при более толстых наматываемых полосах, которые создают пологие перепады в намотке (в виде наклонных переходов), прижимные ролики соответствующими приводными элементами подтягиваются к жесткому упору.
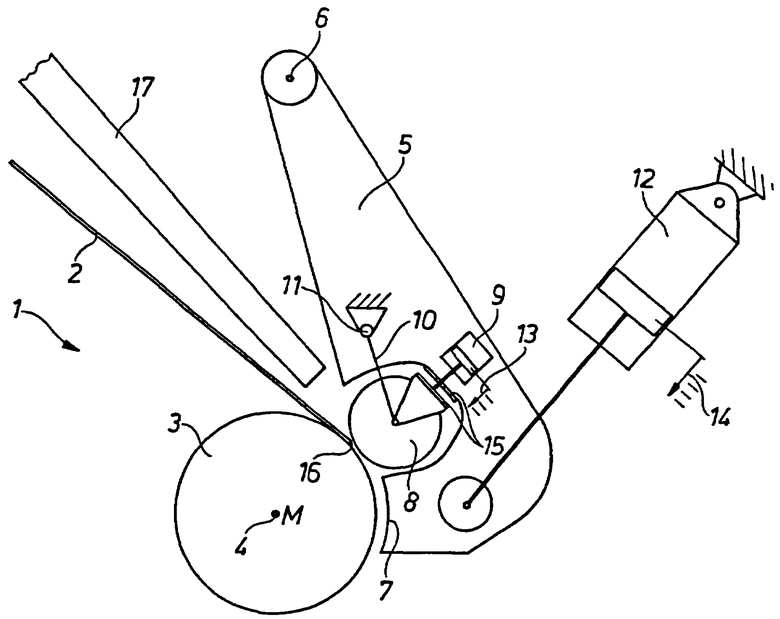
На чертеже представлен пример осуществления изобретения, на котором показано намоточное устройство для намотки тонкой металлической полосы, вид сбоку.
На чертеже видно намоточное устройство 1, при помощи которого осуществляется намотка металлической полосы 2. Для этого предусмотрен намоточный барабан 3, который вращается вокруг горизонтальной оси вращения 4. Полоса 2 поступает с не показанной чистовой прокатной клети и посредством шахтной заслонки 17 направляется в расположенную глубже зону, в которой установлен намоточный барабан 3.
Чтобы наматываемую полосу 2 оптимально намотать на намоточный барабан 3, предусмотрены направляющий щит 7 и прижимной ролик 8 (или несколько расположенных параллельно друг другу направляющих щитов 7 и прижимных роликов 8), которые обеспечивают максимально хорошую укладку полосы 2 на окружную поверхность намоточного барабана или на уже намотанный полосовой материал. Направляющий щит 7, равно как и прижимной ролик 8 расположены на качающемся рычаге 5, который установлен вокруг оси 6 вращения, которая расположена параллельно оси 4 вращения намоточного барабана 3.
Качающийся рычаг 5 приводится в движение приводным элементом 12, в данном случае выполненным в виде гидравлической поршневой системы. Впрочем, приводной элемент 12 служит для сообщения движения качающемуся рычагу 5 в целом, вместе со всеми расположенными на нем деталями. Таким образом, качающийся рычаг 5 имеет высокий момент инерции масс (в частности, высоко динамичный момент инерции масс вокруг оси 6). Вместе с тем, очень трудно обеспечить высоко динамичное движение, в частности прижимного ролика 8, что дает преимущества в плане щадящего манипулирования, в частности тонких полос 2.
Поэтому предусмотрены приводные средства 9, при помощи которых лишь прижимной ролик 8 может перемещаться относительно качающегося рычага 5. Эти приводные средства обозначены схематично в примере осуществления как гидравлическая или пневматическая поршневая система.
Далее, в примере осуществления предусмотрено, что прижимной ролик 8 расположен в качающемся рычаге 10 ролика (также изображенном лишь схематично), который установлен в месте шарнира в качающемся рычаге 5, а именно в оси 11, расположенной параллельно оси 6.
При этом расположение качающегося рычага 10 ролика в качающемся рычаге 5 осуществлено таким образом, что при возвратно-вращательных движениях качающегося рычага 10 ролика прижимной ролик 8 перемещается по существу в сторону средней точки М намоточного барабана 3 и таким образом оптимально прижимает полосу 2.
Поэтому основной аспект решения состоит в том, что необходимый для движения прижимного или прижимных роликов 8 момент инерции масс уменьшается относительно известных прежде решений, что обеспечивает динамичный режим эксплуатации намоточного устройства 1.
Чтобы избежать перепада в намотке 16, перемещается по существу лишь прижимной ролик 8, который закреплен на своем собственном качающемся рычаге 10. Кроме того, он имеет свой отдельный привод 9, благодаря которому он может перемещаться в направлении намоточного барабана 3 и назад от него. Этот привод 9 может быть механическим, электрическим, пневматическим, гидравлическим или осуществляться путем комбинации приводных возможностей.
Качающийся рычаг 5 предварительно позиционируется приводимым элементом 12 соответственно так, что от перепада 16 в намотке может уклониться лишь прижимной ролик 8. Один только прижимной ролик 8 обладает существенно меньшей инерцией, чем качающийся рычаг 5 в целом. Благодаря этому возможна большая динамика. Эта высокая динамика дает преимущество особенно при намотке тонких металлических полос, так как здесь имеют место высокая скорость и небольшие перепады 16 в намотке.
Позиционирование прижимного ролика 8 осуществляется, следовательно, в целом посредством обоих приводных элементов 9 и 12. Оба приводных элемента 9, 12 соединяются друг с другом при помощи не показанного блока управления или регулирования (с соответственно заданным алгоритмом для учета геометрии устройства). Блок управления или регулирования учитывает разжим намоточного барабана, толщину полосы 2, скорость намотки, положение торца полосы и конца полосы, число витков, диаметр рулона, а также геометрию качающихся рычагов 5, 10. Таким образом, из соответствующих элементарных геометрических отношений блок управления или регулирования тотчас определяет, каким образом необходимо настроить приводные средства 9, 12, чтобы получить желательное или требуемое положение прижимного ролика 8.
Чтобы обеспечить работу системы в замкнутом контуре автоматического регулирования, приводные средства 9, 12 снабжены соответствующими системами измерения пути 13, 14, что обеспечивает точную автоматическую установку заданного положения прижимного ролика 8.
Если приводы 9, 12 (в примере осуществления гидроцилиндры) снабдить динамометрической системой, прижимной ролик 8 может быть позиционирован и с заданным регулированием усилия поджимать металлическую полосу 2 или намоточный барабан (например, для калибровки). Это дает то преимущество, что все устройства и металлическая полоса 2 работают в щадящем режиме. Это означает меньше повреждений и больший срок службы.
При толстых полосах скорость намотки относительно медленная и перепады 16 в намотке пологие, так что требования к динамике прижимного ролика 8 или качающимся рычагам относительно невелики. Кроме того, может так случиться, что при толстых полосах необходимы высокие прижимные усилия. В этой рабочей ситуации преимущественным является подтягивание прижимного ролика 8 посредством приводного средства 9 к жесткому упору 15, который расположен на качающемся рычаге 5.
Ось 11 прижимного ролика 8 может быть выполнена таким образом, она не имеет зазора или имеет очень незначительный зазор. Это может быть реализовано в конструкции из конусного гнезда на болте и конусной втулки, которые образуют фрикционное замыкание относительно опорного отверстия. Вращательное движение может осуществляться посредством подшипника с очень ограниченным или регулируемым зазором.
В случае использования гидравлического или пневматического привода 9 прижимной ролик 8 оправдывает свое назначение, если предусмотрен не только один, а два цилиндра.
Если прижимной ролик 8 перемещается посредством лишь одного цилиндра 9, прижимной ролик 8 необходимо установить на раме, которая крутильно-жестко соединяет между собой точки вращения. Таким образом, обеспечивается параллельное подведение прижимного ролика 8 к намоточному барабану 3. Если прижимной ролик 8 на каждой стороне (то есть со стороны привода и со стороны обслуживания) снабжен приводом 9 (например, соответствующим гидроцилиндром), который подводит или отводит ролик 8, синхронизация осуществляется средствами электроники без соединения или лишь с крутильно-жестким соединением.
Если не предусмотрено или предусмотрено лишь крутильно-мягкое соединение стороны привода относительно стороны обслуживания, прижимной ролик 8 может использоваться посредством целенаправленного приложения сил (регулирование сил) на сторону привода и на сторону обслуживания с целью воздействия на движение полосы (то есть на намотку рулона без смещения по кромке).
Перечень позиций на чертеже
1 Намоточное устройство
2 Полоса
3 Намоточный барабан
4 Ось вращения
5 Качающийся рычаг
6 Ось
7 Направляющий щит
8 Прижимной ролик
9 Приводное средство
10 Качающийся рычаг ролика
11 Ось
12 Приводной элемент
13 Система измерения пути
14 Система измерения пути
15 Упор
16 Перепад в намотке
17 Шахтная заслонка
М Средняя точка
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАМОТКИ МЕТАЛЛИЧЕСКИХ ПОЛОС НА ОПРАВКУ | 2007 |
|
RU2391167C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАМОТКИ МЕТАЛЛИЧЕСКОЙ ПОЛОСЫ | 2009 |
|
RU2467817C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАМОТКИ ТОНКОЙ МЕТАЛЛИЧЕСКОЙ ПОЛОСЫ, В ЧАСТНОСТИ ГОРЯЧЕ- ИЛИ ХОЛОДНОКАТАНОЙ ТОНКОЙ СТАЛЬНОЙ ПОЛОСЫ (ВАРИАНТЫ) | 2002 |
|
RU2299774C2 |
| МОТАЛКА ДЛЯ ПРИМОТКИ И НАМОТКИ ГОТОВЫХ МЕТАЛЛИЧЕСКИХ ЛЕНТ | 2010 |
|
RU2480304C1 |
| ПЕЧНАЯ МОТАЛКА | 2007 |
|
RU2391168C1 |
| УСТРОЙСТВО ДЛЯ НАМАТЫВАНИЯ И РАЗМАТЫВАНИЯ ГОРЯЧЕКАТАНЫХ ПОЛОСОВЫХ ЗАГОТОВОК ИЗ ГОРЯЧЕГО МЕТАЛЛА | 2002 |
|
RU2294255C2 |
| МОТАЛКА ДЛЯ МЕТАЛЛИЧЕСКОЙ КАТАНКИ ИЛИ ТЯНУТОЙ ПРОВОЛОКИ И/ИЛИ ПРУТКА | 2006 |
|
RU2355495C1 |
| МАШИНА ДЛЯ НАМОТКИ РУЛОНОВ ИЗ ПРЕДВАРИТЕЛЬНО НАТЯНУТОЙ ПЛЕНКИ | 2014 |
|
RU2664293C2 |
| Устройство для намотки | 1980 |
|
SU847575A1 |
| Устройство для отделения керамической пленки от подложки | 1983 |
|
SU1108520A1 |
Изобретение относится к намоточным устройствам и может быть применено для сматывания металлических полос в рулон. Намоточное устройство содержит намоточный барабан, качающийся рычаг, направляющий щит и прижимной ролик. Качающийся рычаг расположен с возможностью вращения вокруг оси. Прижимной ролик снабжен приводным средством. Приводное средство перемещает ролик относительно качающегося рычага. Прижимной ролик и качающийся рычаг или их приводы содержат систему измерения пути. Достигается возможность точного позиционирования прижимного ролика в процессе намотки полос на барабан. 8 з.п. ф-лы, 1 ил.
1. Намоточное устройство (1) для намотки полос (2), в частности тонких металлических полос, содержащее намоточный барабан (3), расположенный с возможностью вращения вокруг оси (4) вращения, а также, по меньшей мере, один качающийся рычаг (5), расположенный с возможностью поворота вокруг оси (6) и содержащий, по меньшей мере, один направляющий щит (7) и, по меньшей мере, один прижимной ролик (8) для направления и соответственно прижатия намоточной полосы (2), при этом, по меньшей мере, один прижимной ролик (8) снабжен, по меньшей мере, одним приводным средством (9) для перемещения прижимного ролика (8) относительно качающегося рычага (5), отличающееся тем, что прижимной ролик (8) и качающийся рычаг (5) или соответственно их приводы (9, 12) содержат каждый систему (13, 14) измерения пути.
2. Намоточное устройство по п.1, отличающееся тем, что приводное средство (9) перемещает прижимной ролик (8) в направлении центра (М) намоточного барабана (3).
3. Намоточное устройство по п.1 или 2, отличающееся тем, что прижимной ролик (8) расположен на качающемся рычаге (10) ролика, который установлен в качающемся рычаге (5), при этом ось (6) качающегося рычага (5) и ось (11) качающегося рычага (10) ролика расположены параллельно одна другой.
4. Намоточное устройство по п.1 или 2, отличающееся тем, что прижимной ролик (8) расположен на линейном исполнительном механизме, который закреплен на качающемся рычаге (5).
5. Намоточное устройство по п.1 или 2, отличающееся тем, что приводное средство (9) расположено в качающемся рычаге (5).
6. Намоточное устройство по п.1 или 2, отличающееся тем, что приводное средство (9) выполнено в виде гидравлической или пневматической поршневой системы.
7. Намоточное устройство по п.1, отличающееся тем, что намоточный барабан (3) снабжен несколькими качающимися рычагами (5).
8. Намоточное устройство по п.1, отличающееся тем, что, по меньшей мере, один качающийся рычаг (5) перемещается при помощи приводного средства (12).
9. Намоточное устройство по п.1, отличающееся тем, что на качающемся рычаге (5) расположен упор (15) для прижимного ролика (8).
| US 4964587 A, 23.10.1990 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ НАМАТЫВАНИЯ ЛИСТОВОГО МАТЕРИАЛА В РУЛОНЫ БЕЗ СЕРДЕЧНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078731C1 |
| DE 3939561 C1, 14.03.1991. | |||

