Изобретение относится к военно-морской технике, в частности к морским подводным противовоздушным комплексам, и является усовершенствованием изобретения, описанного в заявке №2008105175 (входящий 005621 от 11.02.2008 г.).
Известен противовоздушный автономный универсальный комплекс самообороны подводных лодок («ПАУК» СО ПЛ) и способ его применения.
Указанное устройство и способ его применения имеют узкую тактическую направленность и недостатки:
1. «ПАУК» СО ПЛ предназначен для применения только с подводных лодок;
2. «ПАУК» СО ПЛ применяется только для самообороны;
3. «ПАУК» СО ПЛ после применения демаскирует местоположение ПЛ;
4. «ПАУК» СО ПЛ произвольно изменяет местоположение под воздействием ветра и течения (следствие - искусственное ограничение времени нахождения в боевом состоянии).
Основной задачей, на решение которой направлено изобретение, является расширение тактических возможностей боевого применения противовоздушного автономного универсального комплекса, как морской мины, предназначенной для поражения воздушных или морских объектов.
Для выполнения поставленной задачи предлагается противовоздушный автономный универсальный комплекс позиционный подводный управляемый (ПАУК-ППУ), состоящий из всплывающего контейнера с зенитными ракетами, разделяющегося на плавающие сегменты, поддерживаемые на поверхности моря наполненными газом внешними емкостями, при этом основной сегмент имеет в надводной части радиолокационное приемоизлучающее устройство, в подводной части - устройство стабилизации на волнении, а ракетные сегменты соединены с основным сегментом шарнирно-штанговыми механизмами с одной степенью свободы в вертикальной плоскости, отличающийся тем, что вместо реактивного ускорителя к контейнеру прикреплен стандартный минный якорь с катушкой минрепа и механизмом установки на заданное углубление. Комплекс содержит системы, обеспечивающие его функционирование:
- систему инициации и постановки на заданное углубление;
- систему управления и активации всплытия, отличающуюся тем, что для приема управляющих команд и классификационных признаков целей используются электроакустический преобразователь и (или) всплывающее радиоприемное устройство;
- систему развертывания;
- систему стабилизации и учета углов крена на волнении;
- систему поиска и локализации целей;
- систему поражения целей;
- систему самоуничтожения.
Такая конструкция автономного ракетного комплекса позволяет добиться реализации важных оперативно-тактических возможностей:
- оказывать долговременное боевое и психологическое воздействие на воздушные или морские силы в районах, где противник имеет абсолютное превосходство;
- блокировать межконтинентальные и островные воздушные или морские коммуникации;
- осуществлять противоракетную оборону побережья с морских направлений;
- осуществлять противодесантную оборону побережья с морских направлений;
- осуществлять противовоздушную оборону маршрутов и районов действия подводных лодок;
- осуществлять защиту морских минных противокорабельных заграждений от траления вертолетами;
- в противокорабельном варианте комплекс имеет значительно больший радиус поражения, чем известные морские мины.
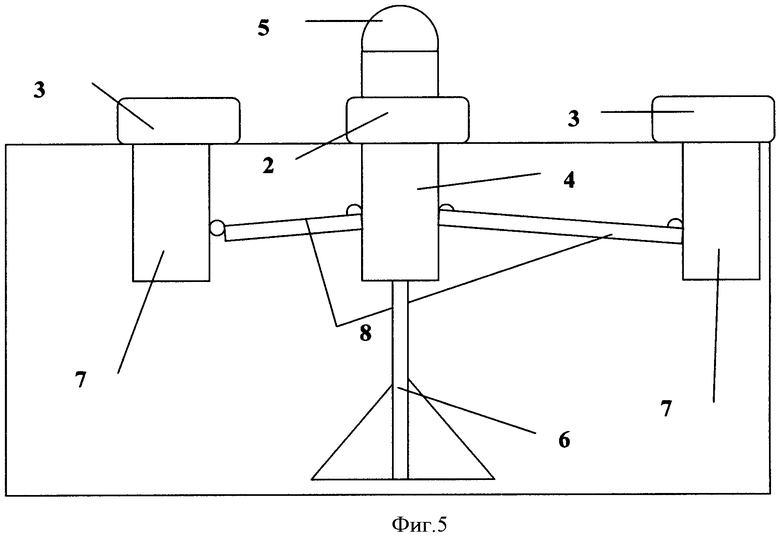
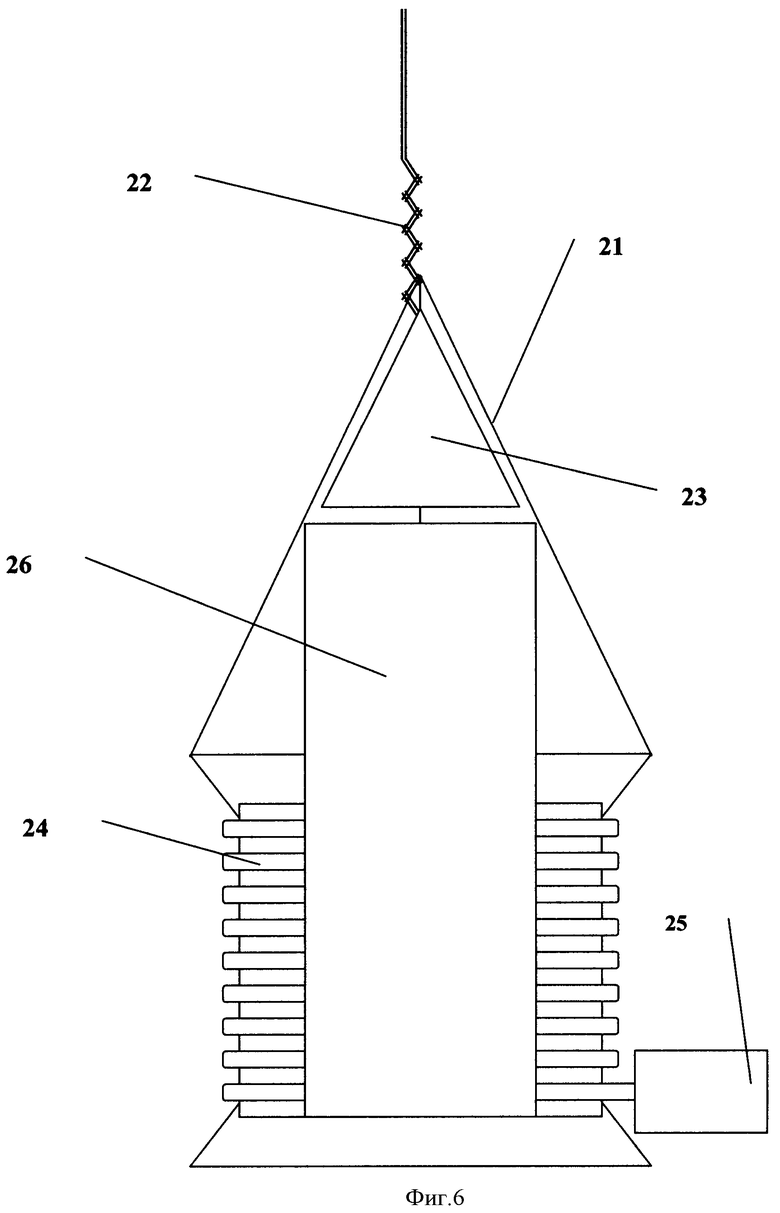
Размещение приборов и механизмов, входящих в состав систем комплекса, поясняется чертежами, где на фигуре 1 изображен «ПАУК-ППУ» в сборном (нераскрытом) положении в разрезе, на фигуре 2 показан «ПАУК-ППУ» в позиционном подводном положении, на фигуре 3 показан принцип отделения от якоря и всплытия в надводное положение, на фигуре 4 показан принцип раскрытия сегментов, на фигуре 5 изображен «ПАУК» в раскрытом положении, на фигуре 6 показан всплывающий приемник сигналов управления в разрезе.
Комплекс состоит из: транспортно-пускового контейнера (фиг.1 поз.1), разделяющегося на плавающие сегменты, поддерживаемые на поверхности моря наполненными газом внешними емкостями (фиг.1, 4, 5 поз.2, 3), при этом основной сегмент (фиг.1, 4, 5 поз.4) имеет в надводной части радиолокационное приемоизлучающее устройство (фиг.1, 4, 5 поз.5), в подводной части - устройство стабилизации на волнении (фиг.1, 4, 5 поз.6), а ракетные сегменты (фиг.1, 4, 5 поз.7) соединены с основным сегментом шарнирно-штанговыми механизмами с одной степенью свободы (фиг.1, 4, 5 поз.8) в вертикальной плоскости. К кормовой оконечности транспортно-пускового контейнера прикреплены пироболтами минный якорь (фиг.1, 2, 3 поз.11) и катушка минрепа (фиг.1, 3 поз.12) с механизмом установки на заданное углубление (фиг.1 поз 12а). Комплекс содержит системы, обеспечивающие его функционирование:
1. Систему инициации и установки на заданное углубление, состоящую из:
- стандартного электрического контактного устройства (фиг.1 поз.9), совместимого с электрическим контактным устройством торпедного аппарата, предназначенного для инициации механизмов комплекса в пусковой установке от управляющего пульта (оператора);
- стандартного механического контактного устройства (фиг.1 поз.10), предназначенного для фиксации момента выхода комплекса из пусковой установки и передачи сигнала в бортовой компьютер;
- стандартного минного якоря (фиг.1 поз.11) с катушкой минрепа (фиг.1, 2, 3 поз.12) и механизмом установки на заданное углубление (фиг.1 поз.12а), предназначенного для удержания комплекса на позиции в подводном положении до получения команды о всплытии на поверхность.
2. Систему управления и активации всплытия, состоящую из:
- всплывающего радиоприемного устройства (фиг.1, 2, 3, 6 поз.21), имеющего значительную положительную плавучесть, содержащего выдвижную антенну (фиг.6 поз.22), пружинное или электромеханическое устройство выдвижения антенны (фиг.6 поз.23), саморазматывающийся кабель-трос, намотанный снаружи на корпус приемника (фиг.6 поз.24), пружинное устройство компенсации рывковых нагрузок на кабель-трос (фиг.6 поз.25), электронный блок (фиг.6 поз.26). В начальном положении приемник находится в незакрепленном состоянии в нише якоря, кабель-трос прикреплен к разъему, размещенному на станине катушки минрепа, и состыкован с разъемом транспортно-пускового контейнера. Всплывающий приемник радиосигналов предназначен для приема управляющих радиокоманд и (или) обнаружения и передачи в бортовой компьютер радиосигналов, являющихся характерными классификационными признаками поражаемых объектов;
- двух или более электроакустических приборов (фиг.1, 3 поз 21a), предназначенных для приема управляющих гидроакустических команд и (или) обнаружения и передачи в бортовой компьютер гидроакустических сигналов, являющихся характерными классификационными признаками поражаемых объектов;
- внешней газовой емкости основного сегмента (фиг.1, 3, 4, 5 поз.2), предназначенной для придания комплексу положительной плавучести на участке всплытия, а также создания уверенной плавучести основного сегмента комплекса на поверхности. В нераскрытом положении газовые емкости упакованы во внешние ниши корпуса и прикрыты самораскрывающимися щитками (фиг.1 поз.13);
- баллона ГВД (газа высокого давления) или газового генератора (фиг.1 поз.14), предназначенного для заполнения внешней газовой емкости газом;
- бортового источника электропитания аккумуляторного типа (фиг.1 поз.15), предназначенного для обеспечения электропитанием систем и механизмов комплекса;
- блока управления (бортового компьютера с исполнительными механизмами) (фиг.1 поз.16), предназначенного для управления взаимодействием систем и механизмов комплекса по заданной программе;
- блока гидростатических датчиков (фиг.1 поз.17), предназначенных для передачи сигналов в блок управления о достижении определенной глубины всплытия.
3. Систему развертывания, состоящую из:
- пироболтов отделения, предназначенных для отделения якоря (фиг.1 поз.18), катушки минрепа (фиг.1, 3 поз.18а) и ракетных сегментов (фиг.1 поз.19) от основного сегмента контейнера;
- шарнирно-штанговых механизмов с одной степенью свободы (фиг.1, 4, 5 поз.8), связывающих ракетные сегменты с основным. В нераскрытом положении штанги утоплены в ниши корпуса транспортно-пускового контейнера;
- внешних газовых емкостей ракетных сегментов (фиг.1, 4, 5 поз.3), предназначенных для придания устойчивой плавучести ракетным сегментам;
- баллонов ГВД или газовых генераторов ракетных сегментов (фиг.1 поз.20), предназначенных для наполнения газом внешних газовых емкостей ракетных сегментов.
4. Систему стабилизации и учета углов крена на волнении, состоящую из:
- выдвижного механизма стабилизации на волнении типа «плавучий якорь» (фиг.1, 4, 5 поз.6), предназначенного для снижения раскачивания комплекса на волнении;
- блока учета углов крена (гироскопических приборов основного сегмента), расположенных в блоке управления (фиг.1 поз.27), предназначенных для определения и передачи в блок управления мгновенных значений крена комплекса на волнении.
5. Систему поиска и локализации целей, состоящую из:
- приемоизлучающего устройства (ПИУ) (фиг.1, 4, 5 поз.5), предназначенного для передачи и приема радиолокационных сигналов;
- электронного радиолокационного блока (фиг.1 поз.28), предназначенного для формирования радиолокационных импульсов и обработки принятых сигналов;
- логического устройства РЛС (компьютера РЛС), входящего в состав электронного радиолокационного блока (фиг.1 поз.29), предназначенного для управления излучением и приемом сигналов, а также классификации принятых сигналов по заданным признакам.
6. Систему поражения целей, состоящую из:
- самонаводящихся ракет (фиг.1 поз.30), размещенных в ракетных сегментах (фиг.1, 4, 5 поз.7), предназначенных для непосредственного поражения целей;
- кабелей электропитания и управления (фиг.1 поз.31), размещенных в полых шарнирно-штанговых механизмах, соединяющих основной и ракетные сегменты (фиг.1, 4, 5 поз.8), предназначенных для подачи электропитания и управляющих сигналов к механизмам ракетных сегментов, механизму установки на заданное углубление, электроакустическим приборам и всплывающему радиоприемнику.
7. Систему самоуничтожения, состоящую из:
- заряда взрывчатого вещества с электродетонатором, размещенного в основном сегменте (фиг.1 поз.32), предназначенного для подрыва аппаратуры и внешней газовой емкости основного сегмента;
- зарядов взрывчатого вещества ракет, размещенных в ракетных сегментах (фиг.1 поз.33), предназначенных для подрыва ракет и внешних газовых емкостей ракетных сегментов;
- электронного командного устройства самоуничтожения (конструктивно входит в блок управления) (фиг.1 поз.15), предназначенного для подачи команды на самоуничтожение комплекса по заданным признакам;
- гидростата атмосферного давления, расположенного в нижней части основного сегмента (фиг.1 поз.34), предназначенного для подачи сигнала в электронное командное устройство самоуничтожения об извлечении комплекса из воды (один из признаков самоуничтожения).
Работа устройства
Способ поражения воздушных или морских объектов самонаводящимися ракетами, стартующими в надводном положении из всплывающего транспортно-пускового контейнера, изначально находящегося на заданном углублении в позиционном подводном положении, отличающийся управляемостью и долговременностью боевого воздействия, при этом системы и механизмы комплекса автономно осуществляют следующие операции:
1. Отделение якоря и установку контейнера на заданное углубление. Удержание контейнера, прикрепленного минрепом к якорю в определенной позиции.
2. Всплытие на поверхность радиоприемного устройства, соединенного с контейнером кабель-тросом.
3. Получение через радиоприемное устройство или (и) электроакустический прибор управляющих команд и (или) сигналов, являющихся характерными признаками поражаемых объектов.
4. Всплытие контейнера на поверхность под воздействием положительной плавучести внешней газовой емкости.
5. Разделение контейнера на сегменты с сохранением электропитания, управления и единой системы координат для всех сегментов.
6. Придание сегментам значительной положительной плавучести за счет собственных внешних плавучих газовых емкостей.
7. Задействование механической системы стабилизации и электронной системы учета морского волнения.
8. Осуществление поиска воздушных (морских) целей путем радиолоцирования воздушной полусферы (надводного горизонта).
9. Осуществление классификации целей по заданным признакам.
10. Выдачу данных целеуказания (траектории полета) самонаводящимся ракетам.
11. Запуск ракет.
12. Повторение п.8-11 при необходимости.
13. Самоуничтожение комплекса по заданному признаку.
В том случае, когда носителем комплекса «ПАУК-ППУ» является подводная лодка, его способ применения описывается следующим образом.
Комплекс находится в пусковой установке (торпедном аппарате), их электроконтактные устройства состыкованы. По приказу на применение оператор пульта управления пусковыми установками подает электропитание на комплекс, заполняет пусковую установку (ПУ) водой и открывает ее переднюю крышку. Электропитание через стандартное электрическое контактное устройство (фиг.1 поз.9) поступает к бортовому источнику электропитания (фиг.1 поз.15), инициируя его, далее к блоку управления (фиг.1 поз.16), где происходит разогрев и включение бортового компьютера, к блоку учета углов крена (гироскопических приборов основного сегмента), расположенных в блоке управления (фиг.1 поз.16), где происходит фиксирование абсолютных значений вертикали и горизонтали. К моменту открытия передней крышки ТА электропитание механизмов комплекса передается бортовому источнику электропитания (фиг.1 поз.15). Выбрасывание «ПАУКа-ППУ» из ПУ осуществляется стандартным способом (газом или водой высокого давления), при этом происходит потеря жесткого контакта стандартного механического контактного устройства (фиг.1 поз.10) с дорожкой пусковой установки, о чем передается сигнал в блок управления (фиг.1 поз.16).
После выхода комплекса из пусковой установки и выдержки заданного временного интервала из блока управления (фиг.1 поз.16) поступает сигнал на подрыв пироболтов отделения якоря (фиг.1 поз.18). Якорь (фиг.1, 2, 3 поз.11) отделяется и под воздействием силы тяжести устремляется ко дну, транспортно-пусковой контейнер (ТПК) (фиг.1, 2, 3, поз.1) с закрепленной на нем катушкой минрепа (фиг.1, 2, 3 поз.12) под воздействием положительной плавучести устремляется к поверхности, при этом минреп (фиг.2, 3, 6 поз.24) свободно разматывается. При достижении ТПК (фиг.1, 2, 3 поз.1) верхней границы заданного диапазона глубины постановки сигнал от блока гидростатических датчиков (фиг.1 поз.17) поступает в блок управления (фиг.1 поз.16), а оттуда на прибор установки на заданное углубление (фиг.1 поз.12а), который фиксирует катушку минрепа (фиг.1, 2, 3 поз.12) и прекращает его разматывание. ТПК (фиг.1, 2, 3 поз.1) под воздействием силы тяжести якоря (фиг.1, 2, 3 поз.11) погружается до тех пор, пока не достигнет нижней границы заданного диапазона углубления. При этом сигнал от блока гидростатических датчиков (фиг.1 поз.17) поступает в блок управления (фиг.1 поз.16), а оттуда на прибор установки на заданное углубление (фиг.1 поз.12а), который прекращает фиксировать катушку минрепа (фиг.1, 2, 3 поз.12) и возобновляет его разматывание. Свободное разматывание минрепа (фиг.2, 3, 6 поз.24) позволяет ТПК всплывать, а якорю погружаться.
Этот циклический процесс продолжается до тех пор, пока якорь не опустится на дно, а ТПК не займет положение на заданной глубине недалеко от поверхности. Заданное углубление должно быть минимально достаточным для обеспечения безопасности комплекса в штормовых условиях.
Одновременно с отделением якоря (фиг.1, 2, 3 поз.11), происходит освобождение радиоприемного устройства (фиг.1, 2, 3, 6 поз.21) и его всплытие под воздействием собственной плавучести. При этом разматывается кабель-трос (фиг.6 поз.24), предохраняемый от обрыва пружинным устройством компенсации рывковых нагрузок на кабель-трос (фиг.6 поз.25).
По окончании установки на заданное углубление комплекс находится в положении, показанном на фиг.2.
Для управления состоянием комплекса возможно использование двух каналов: радиосвязи и гидроакустической связи.
Команды управления позволяют перевести комплекс в один из четырех режимов, запрограммированных в блоке управления (фиг.1 поз.16):
- «режим позиционный» - КТП в подводном положении на якоре, радиоприемное устройство на поверхности (фиг.1, 2, 3, 6 поз.21) и электроакустический прибор (фиг.1, 3 поз.21а) под водой принимают только команды управления.
Из «позиционного» режима возможен командный перевод в режимы «поисковый», «боевой», «самоуничтожение»;
- «режим поисковый» - КТП в подводном положении на якоре, радиоприемное устройство (фиг.1, 2, 3, 6 поз.21) на поверхности и электроакустический прибор (фиг.1, 3 поз.21а) под водой принимают команды управления и (или) внешние сигналы в заданных диапазонах частот. Принятые сигналы классифицируются в блоке управления для выявления характерных признаков объектов поражения. Если сигнал классифицирован как признак объекта поражения, комплекс переходит в режим «боевой».
Из «поискового» режима возможен командный перевод в режимы «позиционный», «боевой», «самоуничтожение»;
- «режим боевой» - блок управления (фиг.1 поз.16) подает команду на подрыв пироболтов отделения катушки минрепа (фиг.1, 3 поз.18а). После сброса катушки минрепа (фиг.1, 2, 3 поз.12) блок управления (фиг.1 поз.16) подает команду на открытие запирающего клапана баллона ГВД (фиг.1 поз.14), откуда газ поступает во внешнюю газовую емкость основного сегмента (фиг.1, 2, 3, 4, 5 поз.2), при этом внутренним давлением сбрасываются щитки (фиг.1 поз.13) и емкость раскрывается. Всплытие транспортно-пускового контейнера происходит за счет положительной плавучести внешней газовой емкости основного сегмента. Переход в режим «боевой» показан на фиг.3.
При достижении поверхности блок гидростатических датчиков (фиг.1 поз.17) подает сигнал в блок управления (фиг.1 поз.16), блок управления (фиг.1 поз.16) подает команду на подрыв пироболтов отделения ракетных сегментов (фиг.1 поз.19), на открытие запирающих клапанов баллонов ГВД ракетных сегментов (фиг.1 поз.20) и подачи газа во внешние газовые емкости ракетных сегментов (фиг.1, 4, 5 поз.3), а также команды на запирающий клапан баллона ГВД основного сегмента и подачи газа на выдвижение механизма стабилизации на волнении (фиг.1, 2, 3, 4 поз.6).
Ракетные сегменты (фиг.1, 2, 3 поз.7), удерживаемые шарнирно-штанговыми механизмами (фиг.1, 2, 3 поз.8), под воздействием положительной плавучести газовых емкостей разворачиваются и циркуляционно всплывают в надводное положение.
Электропитание для прогрева аппаратуры и инициации электронного радиолокационного блока (фиг.1 поз.28) и логического устройства РЛС (компьютера РЛС) (фиг.1 поз.29), а также арретирования гироскопов ракет подается одновременно с началом всплытия комплекса. После раскрытия механизма стабилизации (фиг.1, 2, 3, 4 поз.6) и всплытия ракетных сегментов (фиг.1, 2, 3 поз.7) через установленную временную задержку, предназначенную для стабилизации комплекса на поверхности, блок управления (фиг.1 поз.16) подает команду в логическое устройство РЛС (фиг.1 поз.29) на начало поиска целей. Логическое устройство РЛС (фиг.1 поз.29) по заданной программе управляет формированием, излучением и приемом сигналов, создаваемых аппаратурой электронного радиолокационного блока (фиг.1 поз.28), излучаемых и принимаемых радиолокационным приемоизлучающим устройством (фиг.1, 2, 3 поз.5). Классификация целей осуществляется в логическом устройстве РЛС (фиг.1 поз.29) путем сравнения по заданной программе признаков принятых сигналов с заложенными эталонными значениями. Если полученные сигналы классифицированы как цель боевого воздействия, то ее текущие координаты передаются в блок управления (фиг.1 поз.16), где корректируются поправкой, полученной от блока учета углов крена (гироскопических приборов основного сегмента) (фиг.1 поз.27). Далее, бортовой компьютер блока управления по заданной программе определяет траекторию полета ракет и передает данные в инерциальную систему управления УР. После этого блок управления (фиг.1 поз.16) подает команду на запуск ракет. В момент старта первая ракета сбрасывает пластиковую крышку ракетного сегмента, предохраняющую от попадания воды, поднимается вертикально на заданную высоту, осуществляет запрограммированный разворот на боевой курс и сканирует пространство собственной ГСН в процессе полета. Такая последовательность операций осуществляется относительно каждой из целей, классифицированных как объект атаки. По истечении максимального времени полета ракет комплекс вновь осуществляет поиск и классификацию целей и, если таковые обнаружены, обстреливает их повторно до полного израсходования боезапаса ракет.
Если при первичном поиске не обнаружены цели, классифицируемые как объект атаки, по команде логического устройства РЛС (фиг.1 поз.29) электронный радиолокационный блок (фиг.1 поз.28) переходит в пассивный режим работы, осуществляя поиск сигналов радиоизлучающих устройств, присущих объектам атаки, в заданных диапазонах частот. При обнаружении таких сигналов либо по истечении заданного времени комплекс вновь переходит в активный режим поиска.
Из «боевого» режима комплекс переводится только в режим «самоуничтожение» самостоятельно;
- «режим самоуничтожение» - самоуничтожение комплекса производится по команде электронного командного устройства самоуничтожения (конструктивно входящего в блок управления) (фиг.1 поз.15) путем подрыва заряда взрывчатого вещества с электродетонатором, размещенного в основном сегменте (фиг.1 поз.32), а также зарядов взрывчатого вещества ракет, размещенных в ракетных сегментах (фиг.1 поз.33) по следующим признакам:
- при получении управляющей команды;
- при полном израсходовании боезапаса УР;
- при израсходовании энергозапасов бортового источника питания более чем на 90%;
- по истечении заданного времени действия комплекса, установленного в таймер блока управления;
- по сигналу от гидростата атмосферного давления, расположенного в нижней части основного сегмента (фиг.1 поз.34), при несанкционированном извлечении комплекса из воды.
Из режима «самоуничтожение» перевод в другие режимы невозможен.
Источники информации
1. Заявка на изобретение №2008105175 (входящий 005621 от 11.02.2008 г.) «Противовоздушный автономный универсальный комплекс самообороны подводных лодок (ПАУК СО ПЛ)».
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТИВОВОЗДУШНЫЙ АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС САМООБОРОНЫ ПОДВОДНЫХ ЛОДОК ("ПАУК" СО ПЛ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2008 |
|
RU2382313C2 |
| РАКЕТНЫЙ КОМПЛЕКС "СТРАЖ" | 2007 |
|
RU2423659C2 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
| Устройство радиомониторинга морских и воздушных объектов с применением привязного беспилотного летательного аппарата мультикоптерной схемы с электропитанием по тросу-кабелю | 2023 |
|
RU2813105C1 |
| ДВУХМОДУЛЬНАЯ ПОДВОДНАЯ ЛОДКА С АВАРИЙНО-СПАСАТЕЛЬНОЙ СИСТЕМОЙ, ОСНАЩЕННАЯ ОПЕРАТИВНО-ТАКТИЧЕСКИМ КОМПЛЕКСОМ | 2005 |
|
RU2309871C2 |
| МОРСКАЯ СТОРОЖЕВАЯ МИНА | 2015 |
|
RU2599152C1 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| ПСЕВДОИМИТАТОР СТАРТОВОГО КОМПЛЕКСА | 2013 |
|
RU2543436C9 |
| КОМПЛЕКС ОРУЖИЯ ДЛЯ ПОРАЖЕНИЯ НАЗЕМНЫХ БЕРЕГОВЫХ ОБЪЕКТОВ И СПОСОБ ЕГО ПРИМЕНЕНИЯ С ПОДВОДНЫХ НОСИТЕЛЕЙ | 2015 |
|
RU2624258C2 |
| ВОДНОЕ ТРАНСПОРТНО-ПУСКОВОЕ УСТРОЙСТВО | 2009 |
|
RU2399852C1 |
Группа изобретений относится к военно-морской технике. Предложенный комплекс состоит из всплывающего контейнера с зенитными ракетами, разделяющегося на плавающие сегменты, поддерживаемые на поверхности моря наполненными газом внешними емкостями. Основной сегмент имеет в надводной части радиолокационное приемоизлучающее устройство, а в подводной части - устройство стабилизации на волнении. Ракетные сегменты соединены с основным сегментом шарнирно-штанговыми механизмами с одной степенью свободы в вертикальной плоскости. К нижней части транспортно-пускового контейнера прикреплены пироболтами стандартный минный якорь и катушка минрепа с механизмом установки на заданное углубление. Предложенный способ предполагает поражение воздушных или морских объектов самонаводящимися ракетами, стартующими в надводном положении из всплывающего транспортно-пускового контейнера, изначально находящегося на заданном углублении в позиционном подводном положении. Контейнер удерживается на заданном углублении минрепом, прикрепленным к якорю, и изменяет режимы своей активности по указаниям команд, получаемых по радиоканалу и/или гидроакустическому каналу связи. Группа изобретений позволяет расширить тактические возможности боевого применения комплекса, как морской мины, предназначенной для поражения воздушных или морских объектов. 2 н.п. ф-лы, 6 ил.
1. Противовоздушный (противокорабельный) автономный универсальный комплекс позиционный подводный управляемый, состоящий из всплывающего контейнера с ракетами, разделяющегося на плавающие сегменты, поддерживаемые на поверхности моря наполненными газом внешними емкостями, при этом основной сегмент имеет в надводной части радиолокационное приемоизлучающее устройство, в подводной части - устройство стабилизации на волнении, а ракетные сегменты соединены с основным сегментом шарнирно-штанговыми механизмами с одной степенью свободы в вертикальной плоскости, отличающийся тем, что вместо реактивного ускорителя к контейнеру прикреплены стандартный минный якорь и катушка минрепа с механизмом установки на заданное углубление, содержащий системы, обеспечивающие его функционирование: систему инициации и постановки на заданное углубление; систему управления и активации всплытия, использующую для приема управляющих команд и классификационных признаков целей электроакустический преобразователь и/или всплывающее радиоприемное устройство; систему развертывания; систему стабилизации и учета углов крена на волнении; систему поиска и локализации целей; систему поражения целей; систему самоуничтожения.
2. Способ поражения воздушных или морских объектов самонаводящимися ракетами, стартующими в надводном положении из всплывающего транспортно-пускового контейнера, изначально находящегося в позиционном подводном положении, удерживаемого на заданном углублении минрепом, прикрепленным к якорю, и изменяющего режимы своей активности по указаниям команд, получаемых по радиоканалу и/или гидроакустическому каналу связи, при этом системы и механизмы комплекса автономно осуществляют следующие операции: отделяют якорь и устанавливают контейнер на заданное углубление в определенной позиции, осуществляют всплытие на поверхность радиоприемного устройства, соединенного с контейнером кабель-троссом, получают через радиоприемное устройство или/и электроакустический прибор управляющие команды и/или сигналы, являющиеся характерными признаками поражаемых объектов, инициируют отделение от минрепа и всплытие контейнера на поверхность под воздействием положительной плавучести внешней газовой емкости, осуществляют разделение контейнера на сегменты, с сохранением электропитания, управления и единой системы координат для всех сегментов, придают сегментам значительную положительную плавучесть за счет собственных внешних плавучих газовых емкостей, задействуют механическую систему стабилизации и электронную систему учета морского волнения, осуществляют поиск воздушных или морских целей путем радиолоцирования воздушной полусферы или надводного горизонта, осуществляют классификацию целей по заданным признакам, выдают данные целеуказания (траектории полета) самонаводящимся ракетам, запускают ракеты, повторяют операции поиска, классификации целей и запуска ракет при необходимости, самоуничтожают комплекс по заданному признаку.
| RU 2008105175 А, 20.08.2009 | |||
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2007 |
|
RU2349492C1 |
| ТРУБНАЯ СЕКЦИЯ ПАРОВОГО ИЛИ ВОДОГРЕЙНОГО СЕКЦИОННОГО КОТЛА | 1945 |
|
SU69995A1 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ПУСТОТЕЛЫХ ИЗДЕЛИЙ | 2000 |
|
RU2172247C1 |
| US 6352388 В1, 05.03.2002. | |||

