Изобретение относится к средствам и комплексам радиомониторинга источников радиоизлучения, размещаемых на морских и воздушных носителях.
Устройство радиомониторинга источников радиоизлучения, расположенных на морских и воздушных объектах, включающее прослушивание акватории сторожевым акустическим сенсором, смонтированным на стационарной подводной платформе придонного или якорного типа, при превышении порогового значения шумов от целей осуществление запуска из контейнера платформы подвижного носителя, запуск подвижного носителя производят по сигналу из пункта управления, для чего платформу снабжают устройствами радиоприема сигналов пункта управления, а в качестве подвижного носителя применяют привязной беспилотный летательный аппарат (БЛА) мультикоптерного типа с расположенным на нем аппаратурой радиомониторинга источников радиоизлучения, балластной цистерны, системой разматывания/сматывания кабеля, системой разматывания троса минрепа, защитного цилиндра, тензометрического датчика, троса-кабеля питания и связи с БЛА и надувных поплавков.
Технический результат - создание устройства радиомониторинга, размещаемого в заданных точках Мирового океана, способного функционировать в течении длительного времени и на большей дальности радиомониторинга за счет увеличения дальности прямой видимости путем размещения средств радиомониторинга на БЛА мультикоптерного типа с электропитанием по тросу-кабелю.
УРОВЕНЬ ТЕХНИКИ
Известен радиобуй (1. Патент РФ № 2706882 МПК G01S 1/08 , A01K 75/04 , СПК G01S 1/08, опубл. 21.11.2019 Бюл. № 33) для рыболовных сетей, включающий корпус цилиндрической формы, внутри которого размещены: печатная плата, на которой расположены устройство для передачи радиосигнала, GPS-модуль и управляющий микроконтроллер; зарядное устройство для заряда источника питания с устройством включения/отключения питания, причем на радиобуе предусмотрен «спящий режим», при котором от источника питания отключаются устройство для передачи радиосигнала и GPS-модуль, а управляющий микроконтроллер переходит в режим пониженного потребления тока; на печатной плате дополнительно содержится акселерометр для передачи данных от радиобуя на базовую станцию; корпус выполнен из материала, обеспечивающего герметизацию на больших глубинах в течение длительного времени; устройство включения/отключения питания не имеет средств управления на внешней части корпуса.
Недостатком данного устройства в силу стоящих перед ним задач является его ориентированность на дальность обнаружения его собственного местоположения, а не мониторинг сигналов сторонних источников радиоизлучения (ИРИ).
Известны гидроакустический буй-маяк и способ навигационного оборудования морского района (2. Патент РФ № 2709058 МПК B63G 5/00 Опубл. 13.12.2019 Бюл. № 35, 3. Патент РФ № 2710831, МПК B63G 5/00, опубл. 14.01.2020, бюл. № 2) включающий источник тока, аппаратуру управления, всплывающий поплавок с антенной и приемником спутниковой системы навигации типа ГЛОНАСС и аппаратурой приема и излучения гидроакустических сигналов, при этом мобильный гидроакустический буй-маяк размещается в отдельном модуле автономного необитаемого подводного аппарата, имеющего бортовую систему управления, устройства связи и навигации, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок и наружное оперение с рулями. Буй-маяк либо оснащается радиопередатчиком и антенной для подачи сигналов о своем местонахождении при всплытии на поверхность, либо дополнительно модуль оборудуется устройством отделения всплывающего поплавка с антенной от подводного аппарата и возвращения его обратно с приводом и катушкой с кабелем, связывающим приемник спутниковой системы навигации, расположенной в поплавке с антенной, с аппаратурой управления буя, а также устройством распознавания сигналов запроса своих сил для разрешения передачи запрашиваемой ими информации, шифратором, преобразующим информацию для предотвращения ее восстановления в случае перехвата посторонними объектами и дешифратором, осуществляющим обратное преобразование информации, вычислительным устройством и датчиками гидростатического и гидродинамического давления, служащими для расчета скорости дрейфа мобильного гидроакустического буя-маяка при его покладке на грунт, направления и величины горизонтального сноса поплавка относительно точки постановки
Недостатком данного способа и устройста является то, что буй-маяк при всплытии или всплывающий поплавок с антенной для подводного аппарата не обеспечивает большой дальности радиомониторинга.
Известна плавучая морская мачта (3. Патент на полезную модель РФ № 139792 МПК B63B 35/44 , опубл. 20.04.2014, бюл. № 11), содержащая полупогружную платформу обтекаемой формы, состоящую из эксцентрика с шейкой, на которой установлена площадка с мачтой связи и размещенным на ней приемопередающим и технологическим оборудованием, конструктивную ватерлинию произвольной конфигурации, центр тяжести и метацентр, расположенные на вертикальной оси ниже конструктивной ватерлинии, а тело шейки размещено выше и ниже конструктивной ватерлинии, при этом вес части плавучей морской мачты, расположенной ниже конструктивной ватерлинии, по меньшей мере, в два раза превышает вес части, расположенной выше конструктивной ватерлинии, с учетом ветровых и волновых нагрузок на надводную часть согласно соотношению: Р1> 2(Р2+ Р3+ Р4), где: P1 - вес части плавучей морской мачты, расположенной ниже конструктивной ватерлинии; Р2 - вес части плавучей морской мачты, расположенной выше конструктивной ватерлинии; Р3 - ветровая нагрузка; Р4 - волновая нагрузка.
Недостатком данного устройства является его постоянно надводное положение, являющееся демаскирующим признаком, а также ограниченность зоны радиомониторинга вследствие относительно низкого подъема приемо-передающего оборудования.
Известен спускаемый разведывательный модуль «Светлячок» (4. Патент РФ № 2543084 МПК G01S 7/38 опубл. 27.02.2015 бюл. № 6) представляющий разведывательный модуль, состоящий из системы электропитания, системы определения радиотехнических характеристик источников излучения радиоволн, датчиков давления, влажности и температуры, высотомера, устройства, стабилизирующего полет и осуществляющего торможение падения, а парашютная система, имеющая аэродинамическое качество, система управления парашютом, система оптического наблюдения, состоящая из оптического устройства, гиростабилизированной платформы, подсистемы управления оптическим устройством по пеленгу и углу места с передачей данных оптического наблюдения в систему управления, куда одновременно поступает информация от системы определения радиотехнических характеристик источников излучения радиоволн, навигационной системы, сигнализирующей о его текущем положении в пространстве и текущих значениях температуры, давления, влажности и высоты, позволяющих, определяя гидрометеоусловия на разных высотах, учитывать рефракцию радиоволн для более точного определения параметров движения объектов наблюдения - источников излучения радиоволн, с передачей данных потребителю в реальном масштабе времени с помощью приемо-передающего устройства, которое параллельно позволяет потребителю производить управление в реальном масштабе времени системой оптического наблюдения и выдавать команды на снятие ступени предохранения с системы самоликвидации, состоящей из боеприпаса с детонатором, предохранительно-исполнительного механизма, датчиков воды и датчиков перегрузки, позволяющей исключить попадание устройства к другим пользователям, для обеспечения многократного использования устройства в его состав введена системы спасения, состоящая из емкостей, которые обеспечивают положительную плавучесть и уменьшение силы удара о поверхность в допустимых приделах для сохранения работоспособности устройства, емкостей с рабочим газом, пироклапанов, для облегчения поиска введена система оптической сигнализации местоположения заявленного устройства, состоящая из источников яркого света и источника питания, для прогнозирования места приземления в случае отказа системы управления и навигационной системы введены датчики скорости ветра и направления ветра.
Недостатком данного устройства является то, что определение радиотехнических характеристик источников излучения радиоволн происходит в течении времени ограниченного спуском аппарата, а следовательно, осуществление радиомониторинга в течении длительного времени проблематично.
Известен способ обнаружения морских целей (5. Патент РФ № 2554640, МПК F41G 7/28, опубл. 27.06.2015 Бюл. № 18), включающий прослушивание акватории сторожевым акустическим сенсором, смонтированным на стационарной подводной платформе придонного или якорного типа, при превышении порогового значения шумов от целей осуществление запуска из контейнера платформы подвижного носителя с активным лоцирующим сенсором цели, выходом подвижного носителя в расчетную зону нахождения цели и включением активного сенсора, а перед погружением платформы в воду на подвижный носитель вводят координаты точки погружения, в качестве подвижного носителя активного сенсора применяют беспилотный летательный аппарат (БЛА) самолетного типа со складным крылом и ракетной стартово-разгонной ступенью (СРС), запуск подвижного носителя производят по сигналу из пункта управления, для чего платформу дополнительно снабжают устройствами радиоприема и звукоподводного приема сигналов пункта управления, при приеме сигналов пункта управления контейнер со сложенным БЛА отделяют от подводной платформы и осуществляют его подъем к поверхности воды, при выходе контейнера из-под воды производят открытие контейнера, запуск БЛА в воздух и его скоростной подъем на высоту маршевого полета посредством стартово-разгонной ступени, далее производят отделение СРС от БЛА, раскрытие крыла БЛА в маршевое положение, запуск двигательной установки БЛА, включение активного сенсора БЛА на излучение, определение собственных координат и составляющих скорости БЛА, поиск по программе, обнаружение и идентификацию надводных целей с передачей сообщений о координатах обнаруженных целей неограниченному количеству потребителей по радиоканалу БЛА, кроме того изменение программы полета БЛА производят по радиосигналу из пункта управления, активную локацию с борта БЛА производят посредством радиолокатора бокового обзора либо радиолокатора бокового обзора с синтезированием апертуры антенны, выявление радиоизлучающих целей с борта БЛА производят посредством радиопеленгатора, выявление оптических и теплоконтрастных целей с борта БЛА производят посредством оптико-электронной системы, маршевый полет БЛА могут осуществлять с помощью винтомоторной установки с электродвигателем либо двигателем внутреннего сгорания и складными лопастями винта, снижение гидролокационной заметности контейнера с БЛА производят путем размещения по внешней поверхности контейнера шумопоглощающего покрытия, при несанкционированных воздействиях на платформу осуществляют затопление контейнера с БЛА посредством системы аварийного затопления, которую задействуют по сигналу от датчиков гидростатического давления или перемещения.
Недостатком данного устройства является то, что процедура радиомониторинга по сути ограничена временем активной фазы полета БЛА, что ограничивает время мониторинга. Данная система выбрана качестве прототипа.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Целью предлагаемого изобретения является увеличение длительности процедуры радиомониторинга источников радиоизлучения, расположенных на морских и воздушных объектах, с возможностью многократного применения беспилотного летательного аппарата привязного типа с электропитанием по тросу-кабелю.
Данная цель достигается тем, что в известное устройство радиомониторинга источников радиоизлучения, расположенных на морских и воздушных объектах, включающее сторожевой акустический сенсор для прослушивание акватории, смонтированный на стационарной подводной платформе придонного или якорного типа, при превышении порогового значения шумов от целей осуществление запуска из контейнера платформы подвижного носителя, запуск подвижного носителя производят по сигналу из пункта управления, для чего платформу снабжают устройствами радиоприема сигналов пункта управления отличающийся тем, что в качестве подвижного носителя применяют привязной беспилотный летательный аппарат (БЛА) мультикоптерного типа с расположенным на нем аппаратурой радиомониторинга источников радиоизлучения, балластной цистерны, система разматывания/сматывания кабеля, система разматывания троса минрепа, защитного цилиндра, тензометрического датчика, трос-кабель питания и связи с БЛА и надувных поплавков.
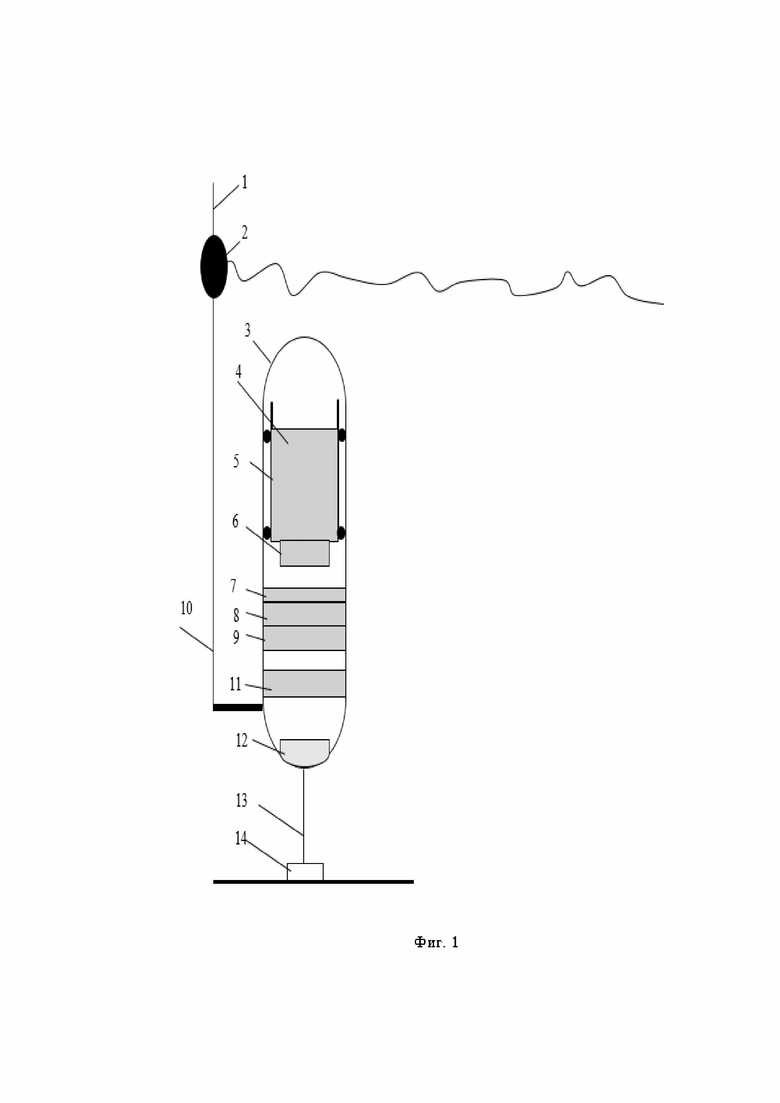
Схема устройства, реализующего предлагаемое техническое решение, представлена на фиг.1 и фиг 2.
Фиг. 1 поясняет работу устройства при нахождении под водой.
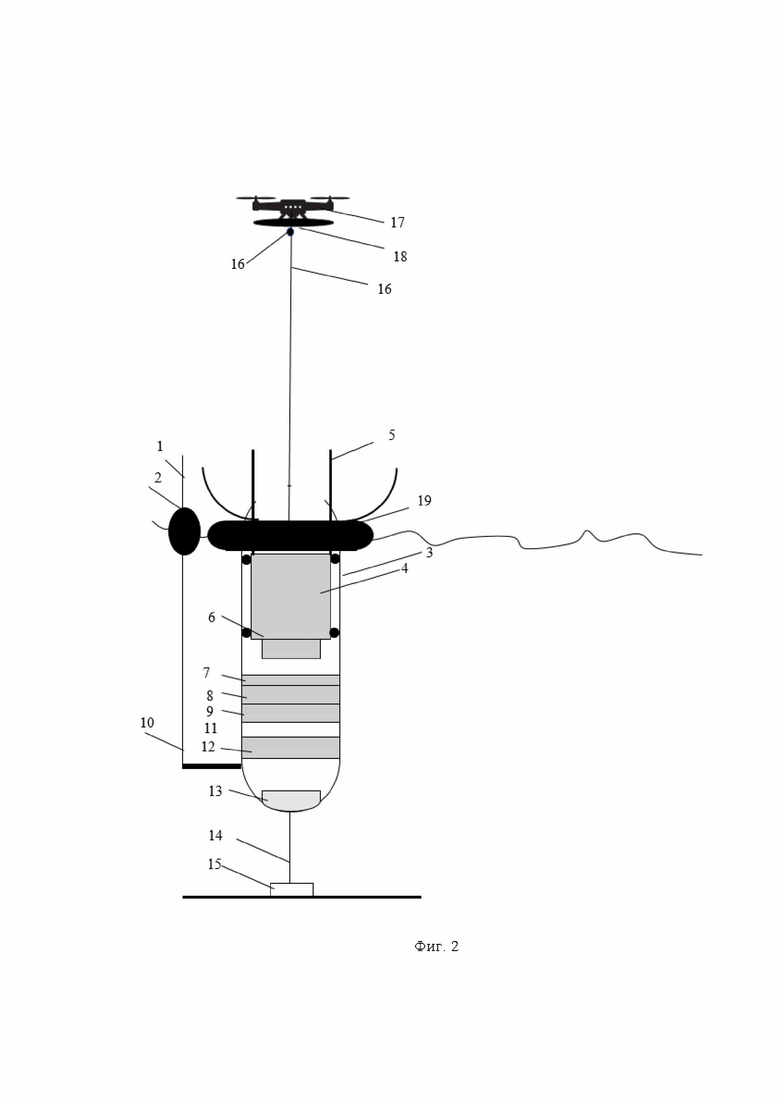
Фиг. 2 поясняет работу устройства при ведении мониторинга.
На фиг 1 и фиг 2 приняты следующие обозначения:
1 - антенна радиоканала;
2 – буй с аппаратурой радиосвязи;
3 – герметичный корпус контейнера с откидной крышкой;
4- контейнер с БЛА;
5 - защитный цилиндр с системой выдвижения;
6 - система разматывания/сматывания кабеля;
7 - система управления платформы;
8 - блок гидрофонов;
9 - аппаратура электропитания;
10 - трос с кабельной линией связи;
11 – балластная цистерна;
12 – система разматывания троса минрепа;
13 - минреп;
14 – якорь
15 – тензометрический датчик;
16 – трос-кабель питания и связи с БЛА;
17 – БЛА;
18- аппаратура радиомониторинга;
19 – надувные поплавки.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Функционирование предлагаемого устройства радиомониторинга источников радиоизлучения, расположенных на морских и воздушных объектах, осуществляется следующим образом.
Подводная платформа (фиг.1) скрытно устанавливаться в заданном районе акватории с надводных/подводных кораблей (судов) и/или авиационных носителей.
После установки на грунт и удержанием ее якорем 14 платформа функционирует в дежурном режиме.
По сигналу пункта управления принимаемому антенной радиоканала 1, размещенной на буе 2, в свою очередь закрепленному на тросе 10 (сигналу от блока блок гидрофонов 8) система управления платформой 7 формирует команды на продувку балластной цистерны 11 и в систему разматывания троса минрепа 12, после чего герметичный контейнер 3 всплывает (см. фиг 2) и удерживается минрепом 13 на плаву, производится раскрытие крышки герметичного контейнера 3, выдвижение защитного цилиндра 5, предохраняющего аппаратуру герметичного контейнера 3 от попадания влаги, запуск БЛА 17, причем его электропитание и удержание на заданной высоте осуществляется посредством троса-кабеля питания и связи с БЛА 16, а натяжение троса-кабеля 16 управляется сигналами от тензодатчика 15 посредством системы разматывания/сматывания кабеля 6, при достижении БЛА заданной высоты включается аппаратура радиомониторинга 18, результаты работы которой по поиску, обнаружению, измерению угловых координат ИРИ по тросу-кабелю питания и связи с БЛА 16, поступает в систему управления платформой 7 и по кабельной линией связи 10 в буй с аппаратурой радиосвязи 2, после чего результаты радиомониторинга передаются на пункт управления.
Для обеспечения возможности возвращения БЛА в контейнер и фиксации в заданном месте контейнера в условиях ветра и морского волнения в контейнере располагается электромагнит, а на соответствующих элементах БЛА, соприкасающихся с заданными местами контейнера – металлические пластины. Для фиксации БЛА до старта электромагнит включен. При запуске двигателей БЛА электромагнит отключается.
При поступлении данных с пункта управления команды о прекращении мониторинга система разматывания/сматывания кабеля 6 сматывает трос-кабель питания и связи с БЛА 16 втягивает БЛА 17 в контейнер с БЛА 4, и одновременно включается электромагнит, что заставляет БЛА устанавливаться на нужном месте в контейнере независимо от морского волнения. Система выдвижения защитного цилиндра 5 втягивает цилиндр в герметичный контейнер 3, Система управления платформой 7 формирует команду на заполнение балластной цистерны 11 и сматывания минрепа, после чего система переходит в дежурный режим.
Дополнительно герметичный корпус контейнера с откидной крышкой 3 может оснащаться надувными поплавками 19 для придачи ему большей плавучести при волнении или увеличения скорости всплытия. При переходе из рабочего режима в боевые надувные поплавки 19 могут отбрасываться или сдуваться.
Эффект применения предложенного технического решения включает возможности:
- создания скрытной системы радиомониторинга заблаговременной размещаемой в ключевых районах акватории Мирового океана;
- проведение радиомониторинга с БЛА мультикоптерной схемы привязного типа с питанием по тросу-кабелю позволяет как увеличить дальность радиомониторинга, так и его время;
- реализации принципа внезапного вскрытия источников радиоизлучения размещенных на наземных и воздушных носителях, их дислокации, структуры, маршрутов движения (маневров) в любом районе Мирового океана;
- неограниченного скрытного наращивания группировки средств радиомониторинга.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
| ПРОТИВОВОЗДУШНЫЙ (ПРОТИВОКОРАБЕЛЬНЫЙ) АВТОНОМНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ПОЗИЦИОННЫЙ ПОДВОДНЫЙ УПРАВЛЯЕМЫЙ ("ПАУК" ППУ) И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2009 |
|
RU2413156C1 |
| Система подводного позиционирования устройства типа "купол" для ликвидации подводных разливов нефти | 2019 |
|
RU2714336C1 |
| САМОТРАНСПОРТИРУЮЩАЯСЯ МИНА-ГЛАЙДЕР И СПОСОБ ЕЕ ПОСТАНОВКИ | 2016 |
|
RU2668021C2 |
| РЕАКТИВНАЯ СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2012 |
|
RU2510353C2 |
| Заякоренная профилирующая подводная обсерватория | 2015 |
|
RU2617525C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
| РАКЕТНЫЙ КОМПЛЕКС "СТРАЖ" | 2007 |
|
RU2423659C2 |
| Многофункциональный комплекс для выполнения подводно-технических работ | 2017 |
|
RU2653527C1 |
| Система наблюдения за надводной и подводной обстановкой | 2022 |
|
RU2787578C1 |
Изобретение относится к радиотехнике, в частности к средствам и комплексам радиомониторинга источников радиоизлучения, размещаемых на морских и воздушных носителях. Технический результат - создание устройства радиомониторинга, способного функционировать в течение длительного времени на большей дальности. Результат достигается тем, что предложено устройство радиомониторинга источников радиоизлучения, расположенных на морских и воздушных объектах, включающее сторожевой акустический сенсор для прослушивания акватории, контейнер с подвижным носителем и устройства радиоприема сигналов пункта управления, смонтированные на стационарной подводной платформе придонного или якорного типа, выполненной с возможностью осуществления запуска подвижного носителя из контейнера при превышении порогового значения шумов от целей по сигналу из пункта управления, отличающееся тем, что в качестве подвижного носителя применяют привязной беспилотный летательный аппарат (БЛА) мультикоптерного типа с расположенной на нем аппаратурой радиомониторинга источников радиоизлучения. 2 ил.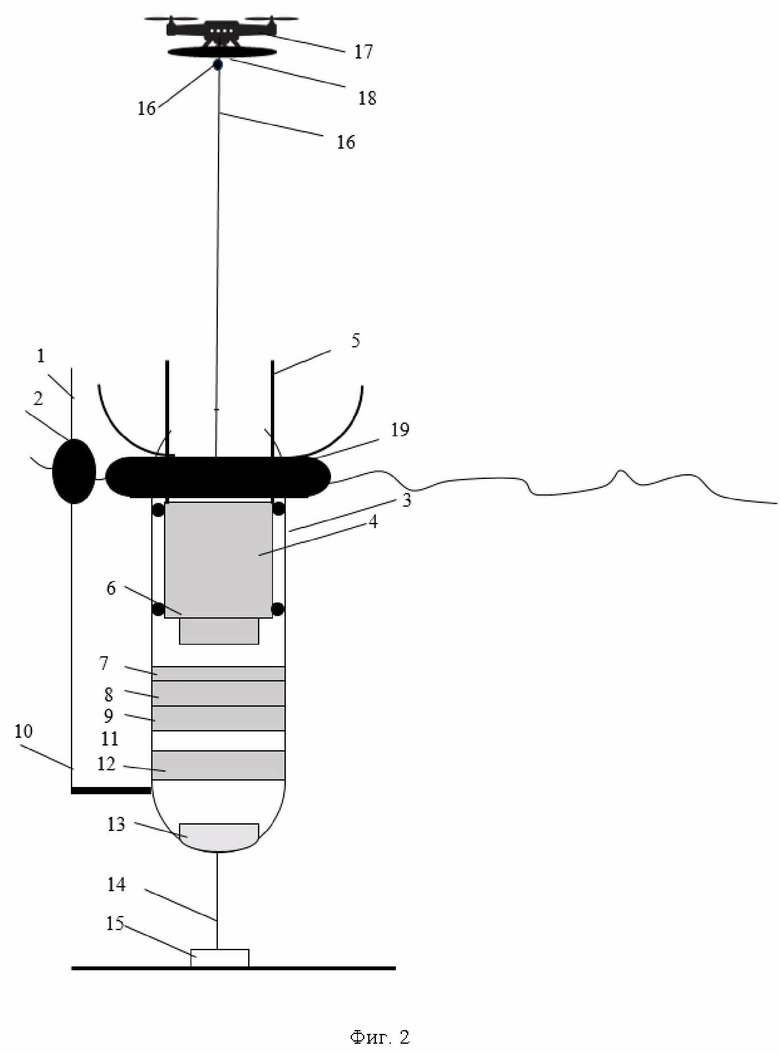
Устройство радиомониторинга источников радиоизлучения, расположенных на морских и воздушных объектах, включающее сторожевой акустический сенсор для прослушивания акватории, контейнер с подвижным носителем и устройства радиоприема сигналов пункта управления, смонтированные на стационарной подводной платформе придонного или якорного типа, выполненной с возможностью осуществления запуска подвижного носителя из контейнера при превышении порогового значения шумов от целей по сигналу из пункта управления, отличающееся тем, что в качестве подвижного носителя применяют привязной беспилотный летательный аппарат (БЛА) мультикоптерного типа с расположенной на нем аппаратурой радиомониторинга источников радиоизлучения, а стационарная подводная платформа придонного или якорного типа дополнительно включает в себя балластную цистерну, систему разматывания/сматывания троса-кабеля питания и связи с БЛА, систему разматывания троса минрепа, защитный цилиндр контейнера, трос-кабель питания и связи с БЛА с тензометрическим датчиком и надувные поплавки.
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
| US 20190128711 A1, 02.05.2019 | |||
| US 10065717 B1, 04.09.2018 | |||
| US 10322820 B2, 18.06.2019 | |||
| СПУСКАЕМЫЙ РАЗВЕДЫВАТЕЛЬНЫЙ МОДУЛЬ "СВЕТЛЯЧОК" | 2013 |
|
RU2543084C2 |
| US 20210129982 A1, 06.05.2021. | |||
