Изобретение относится к технике обработки цифровых данных с помощью электрических устройств и может быть использовано при разработке устройств для программного управления блоков и систем летательных аппаратов, например самолетов гражданской авиации.
Известна платформа интегрированного процессорного кабинета (Integrated Processing Cabinet - IPC) Pro Line 21. Данная платформа содержит два блока, включающих каждый по два коммутатора, процессорный модуль (СММ) и графический модуль (DMM), причем процессорный и графический модули соединены с коммутаторами своего блока (см., например, «Multi-Modal Digital Avionics for Commercial Applications», рис.8.17, http://acast.grc.nasa.gov/main/documents/acast/mmda-reports).
Конструкцией данного кабинета не предусмотрена возможность дублирования процессорных модулей, что не обеспечивает достаточной надежности, особенно для использования в авиационных системах.
Наиболее близким аналогом - прототипом - является платформа интегрированного процессорного кабинета (Common Computing Resource Cabinet - CCR) для самолета В7Е7 (см., например, «Multi-Modal Digital Avionics for Commercial Applications», разделы 11.3.1-11.3.4, рис.11.6, http://acast.grc.nasa.gov/main/documents/acast/mmda-reports), содержащая два блока, каждый из которых имеет два коммутатора и пять связанных с коммутаторами своего блока процессорных модулей, причем коммутаторы одного блока соединены с соответствующими коммутаторами другого блока.
Конструкцией данного устройства предусмотрена возможность дублирования работы каждого блока, однако надежность его работы может быть недостаточной, особенно для использования в дальнемагистральных коммерческих авиалайнерах.
Задача изобретения состоит в разработке платформы интегрированной модульной авионики, конструкция которой обеспечивает возможность многократного дублирования работы каждого блока, что существенно уменьшает вероятность отказа и соответственно гарантирует надежность работы и в нестационарных условиях, например на борту самолета.
Сущность изобретения состоит в том, что платформа интегрированной модульной авионики выполнена в виде крейтов (термин «крейт» употребляется специалистами в качестве синонима термина «контейнер», см., например, http//www.video-svp.ru/files/SVP-RM-BP.pdf), содержащих две подсистемы с установленными в каждой коммутатором и двумя парами вычислительных модулей, причем первый и второй вычислительные модули каждой пары соединены между собой первыми группами входов-выходов, а первые и вторые вычислительные модули первой пары каждой подсистемы вторыми группами входов-выходов подключены ко вторым группам входов-выходов соответственно первого и второго вычислительных модулей второй пары соответствующей подсистемы, при этом первые вычислительные модули первой и второй пары третьими группами входов-выходов соединены соответственно с первой и второй группами входов-выходов коммутатора своей подсистемы, а четвертыми группами входов-выходов подключены соответственно к третьим и четвертым группам входов-выходов коммутатора другой подсистемы крейта, причем вторые вычислительные модули первой пары вычислительных модулей третьими и четвертыми группами входов-выходов соединены соответственно с первыми и вторыми группами входов-выходов, а вторые вычислительные модули второй пары вычислительных модулей своими третьими и четвертыми группами входов-выходов подключены соответственно к третьей и четвертой группам входов-выходов соответствующей подсистемы, при этом коммутаторы своей пятой группой входов-выходов, а первый и второй вычислительные модули каждой пары вычислительных модулей каждой подсистемы своей пятой группой входов-выходов соединены соответственно с пятой по девятую группами входов-выходов соответствующей подсистемы крейта, причем с первой по девятую группы входов-выходов первой подсистемы крейта подключены к соответствующим с первой по девятую группам входов-выходов платформы интегрированной модульной авионики, с десятой по восемнадцатую группы входов-выходов которой соединены соответственно с первой по девятую группами входов-выходов второй подсистемы крейта.
При этом платформа интегрированной модульной авионики может быть выполнена содержащей два крейта, причем коммутаторы первой и второй подсистем первого крейта своими шестыми группами входов-выходов соответственно подключены к шестым группам входов-выходов коммутаторов первой и второй подсистем второго крейта, при этом с первой по восемнадцатую группы входов-выходов платформы интегрированной модульной авионики соединены с соответствующими с первой по восемнадцатую группами входов-выходов первого крейта, а с девятнадцатой по тридцать шестую группы входов-выходов платформы подключены к соответствующим с первой по восемнадцатую группам входов-выходов второго крейта.
Техническим результатом заявляемого изобретения является разработка конструкции, надежность которой по сравнению с известными аналогами при использовании одного крейта выше в два раза, а при использовании в предлагаемой платформе двух крейтов выше в четыре раза при эксплуатации, например на борту самолета.
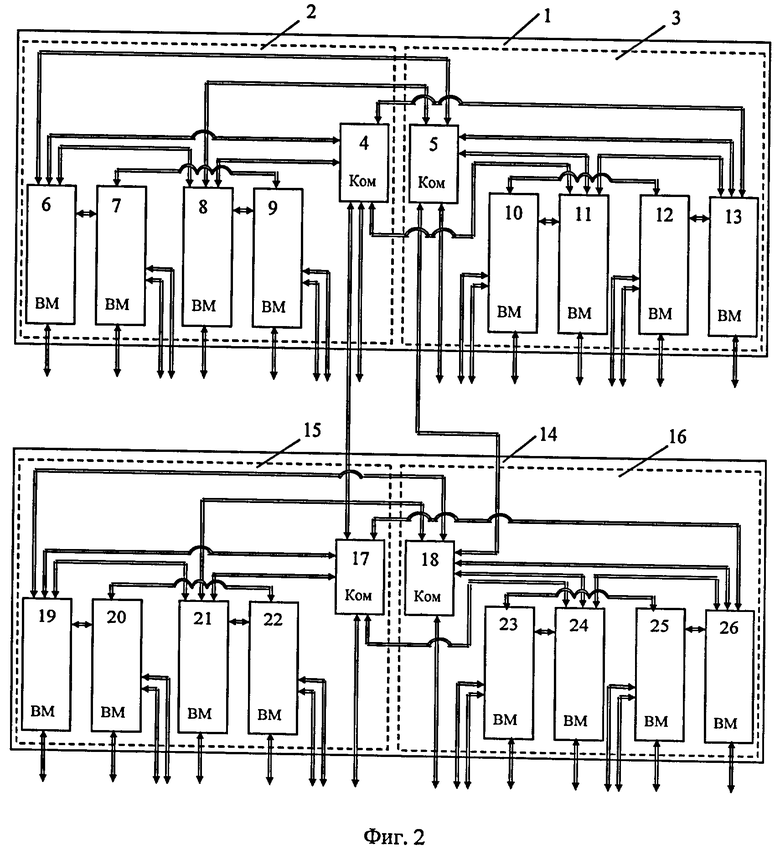
На фиг.1 приведена функциональная блок-схема платформы интегрированной модульной авионики с одним крейтом, а на фиг.2 представлена функциональная блок-схема платформы интегральной модульной авионики, содержащая два крейта.
Платформа интегрированной модульной авионики (фиг.1) выполнена в виде крейта 1, содержащего две подсистемы (2 и 3) с установленными в каждой коммутатором (соответственно 4 и 5) и двумя парами вычислительных модулей (первая пара соответственно 6, 7 и 8, 9, а вторая пара 10, 11 и 12, 13), причем первый и второй вычислительные модули каждой пары (соответственно 6 и 7, 8 и 9, 10 и 11, а также 12 и 13) соединены между собой первыми группами входов-выходов, а первые и вторые вычислительные модули (соответственно 6 и 7, 10 и 11) первой пары каждой подсистемы (соответственно 2 и 3) вторыми группами входов-выходов подключены ко вторым группам входов-выходов соответственно первого и второго вычислительных модулей (соответственно 8 и 9, 12 и 13) второй пары соответствующей подсистемы (соответственно 2 и 3), при этом первые вычислительные модули первой и второй пары (соответственно 6 и 8, 10 и 12) каждой подсистемы (соответственно 2 и 3) третьими группами входов-выходов соединены соответственно с первой и второй группами входов-выходов коммутатора (соответственно 4 и 5) своей подсистемы (соответственно 2 и 3), а четвертыми группами входов-выходов подключены соответственно к третьим и четвертым группам входов-выходов коммутатора (соответственно 5 и 4) другой подсистемы (соответственно 3 и 2) крейта 1, причем вторые вычислительные модули первой пары вычислительных модулей (соответственно 7 и 11) третьими и четвертыми группами входов-выходов соединены соответственно с первыми и вторыми группами входов-выходов, а вторые вычислительные модули второй пары вычислительных модулей (соответственно 9 и 13) своими третьими и четвертыми группами входов-выходов подключены соответственно к третьей и четвертой группам входов-выходов соответствующей подсистемы (соответственно 2 и 3), при этом коммутаторы 4 и 5 своей пятой группой входов-выходов, а первый и второй вычислительные модули (соответственно 6 и 7, 8 и 9, а также 10 и 11, 12 и 13) каждой пары вычислительных модулей каждой подсистемы (соответственно 2 и 3) своей пятой группой входов-выходов соединены соответственно с пятой по девятую группами входов-выходов соответствующей подсистемы крейта 1, причем с первой по девятую группы входов-выходов первой подсистемы 2 крейта 1 подключены к соответствующим с первой по девятую группам входов-выходов платформы интегрированной модульной авионики, с десятой по восемнадцатую группы входов-выходов которой соединены соответственно с первой по девятую группами входов-выходов второй подсистемы 3 крейта 1.
При выполнении платформы интегрированной модульной авионики, содержащей два тождественно выполненных крейта (фиг.2), где дополнительно обозначено: второй крейт 14, его первая и вторая подсистемы соответственно 15 и 16, коммутаторы подсистем 15 и 16 соответственно 17 и 18, вычислительные модули первой и второй пары подсистемы 15 соответственно 19 и 20, 21 и 22, а вычислительные модули первой и второй пары подсистемы 16 соответственно 23 и 24, 25 и 26, коммутаторы 4 и 5 первой и второй подсистем (соответственно 2 и 3) крейта 1 своими шестыми группами входов-выходов соответственно подключены к шестым группам входов-выходов коммутаторов 17 и 18 первой и второй подсистем (соответственно 15 и 16) крейта 14. При этом вычислительные модули каждой пары подсистем 15 и 16 своими соответствующими группами входов-выходов связаны с соответствующими группами входов-выходов вычислительных модулей других пар и коммутаторов соответствующих подсистем аналогично соответствующим связям вычислительных модулей крейта 1, причем вторые вычислительные модули первой пары вычислительных модулей (соответственно 20 и 24) третьими и четвертыми группами входов-выходов соединены соответственно с первыми и вторыми группами входов-выходов, а вторые вычислительные модули второй пары вычислительных модулей (соответственно 22 и 26) своими третьими и четвертыми группами входов-выходов подключены соответственно к третьей и четвертой группам входов-выходов соответствующей подсистемы (соответственно 15 и 16), при этом коммутаторы 17 и 18 своей пятой группой входов-выходов, а первый и второй вычислительные модули (соответственно 19 и 20, 21 и 22, а также 23 и 24, 25 и 26) каждой пары вычислительных модулей каждой подсистемы (соответственно 15 и 16) своей пятой группой входов-выходов соединены соответственно с шестой по девятую группами входов-выходов соответствующей подсистемы крейта 2, причем с первой по девятую группы входов-выходов первой подсистемы 15 крейта 2 подключены к соответствующим с девятнадцатой по двадцать седьмую группам входов-выходов платформы интегрированной модульной авионики, с двадцать восьмой по тридцать шестую группы входов-выходов которой соединены соответственно с первой по девятую группами входов-выходов второй подсистемы 16 крейта 2.
Вычислительные модули (с 6 по 13 и с 19 по 26) предназначены для реализации задаваемых программных процедур и выполнены в виде, например, процессорных блоков типа VPX3-127 (см., например, http://www.cwcembedded.com/products/0/3/516.html) и условно содержат по четыре программных блока каждый, коммутаторы 4, 5, 17, 18 предназначены для работы в соответствии со своим функциональным назначением и выполнены, например, в виде блоков типа VPX3-683 (см., например, http://www.cwcembedded.com/products/6/28/523.html).
Платформа интегрированной модульной авионики работает следующим образом.
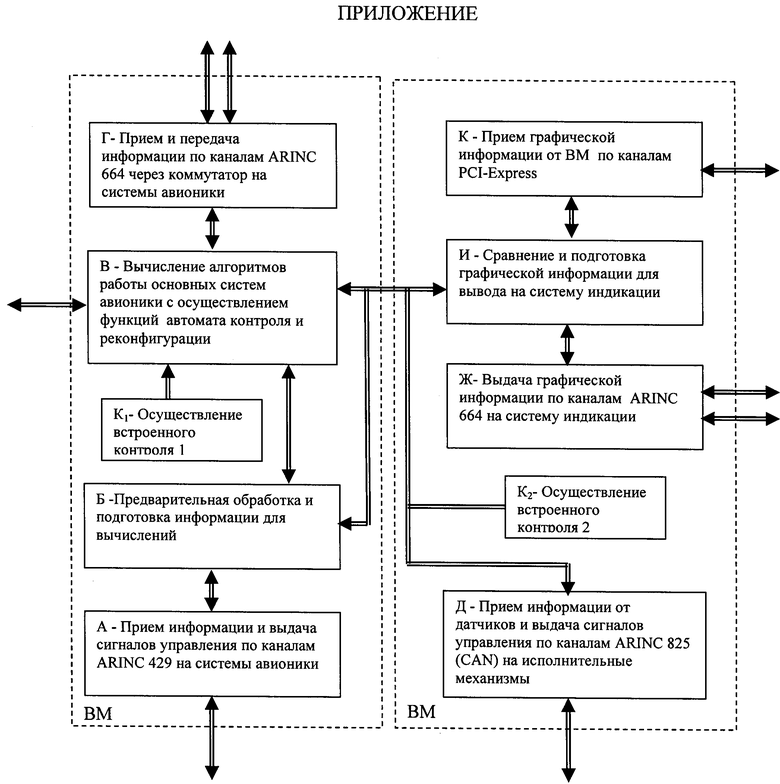
В каждом вычислительном модуле (соответственно с 6 по 13 и с 19 по 26) формируют по четыре программных блока, которые на представленной в Приложении блок-схеме алгоритма работы платформы обозначены буквами: в вычислительных модулях 6, 8, 10, 12, 19, 21, 23 и 25 - А, Б, В и Г, а в вычислительных модулях 7, 9, 11, 13, 20, 22, 24 и 26 - Д, Ж, И и К (см. Приложение).
При этом в программном блоке А вычислительного модуля 6 пары вычислительных модулей 6 и 7, вычислительного модуля 8 пары вычислительных модулей 8 и 9, вычислительного модуля 10 пары вычислительных модулей 10 и 11, вычислительного модуля 12 пары вычислительных модулей 12 и 13, вычислительного модуля 19 пары вычислительных модулей 19 и 20, вычислительного модуля 21 пары вычислительных модулей 21 и 22, вычислительного модуля 23 пары вычислительных модулей 23 и 24, а также вычислительного модуля 25 пары вычислительных модулей 25 и 26 осуществляют прием информации и выдачу сигналов управления по каналам с интерфейсом ARINC 429 (см. стандарты ARINC, например, https://www.arinc.com/cf/store/category.cfm?prod_group_id=1) на системы авионики через пятую группу входов-выходов первых вычислительных модулей каждой пары.
В программном блоке Д вторых вычислительных модулей (вычислительных модулей 7, 9, 11, 13, 20, 22, 24 и 26 соответственно) соответствующей пары вычислительных модулей осуществляют прием информации от датчиков летательного аппарата (не показаны) и выдачу сигналов управления на его (ЛА) исполнительные механизмы по каналам с интерфейсом ARINC 825 (CAN) на пятую группу входов-выходов вторых вычислительных модулей каждой соответствующей пары. Информация от программного блока Д поступает в программный блок Б по каналам PCI-Express (см., например, http://www.pcisig.com/specifications/pciexpress/) через первую группу входов-выходов первого и второго модуля пары.
В программных блоках Б производят предварительную обработку информации, поступающей от соответствующих программных блоков А и Д.
В программных блоках Г обрабатывают информацию от систем авионики с интерфейсом ARINC 664 (AFDX). Эта информация поступает через третьи и четвертые группы входов-выходов первых вычислительных модулей каждой пары соответствующего крейта от коммутаторов его первой и второй подсистем.
Информация от программных блоков Б и Г поступает в программные блоки В для обеспечения алгоритмов работы основных систем авионики (например, системы самолетовождения, технического обслуживания и управления общесамолетным оборудованием).
Результаты вычислений из программных блоков В передают в каждый программный блок И через первые группы входов-выходов первого и второго вычислительного модуля первой пары. Результаты вычислений из программных блоков В передают также в соответствующий первый вычислительный модуль каждой второй пары первой подсистемы соответствующего крейта через вторые группы входов-выходов первого вычислительного модуля соответствующей первой пары вычислительных модулей.
Программный блок К каждого соответствующего второго вычислительного модуля первой пары вычислительных модулей обеспечивает поступление графической информации по каналам PCI-Express от соответствующего второго вычислительного модуля второй пары через вторые группы входов-выходов. Эту информацию передают в программный блок И соответствующего второго вычислительного модуля первой пары, где ее сравнивают с результатами вычислений в блоке В соответствующего первого вычислительного модуля первой пары. При полном совпадении информации от программных блоков В и К, графические коды передают из программного блока И в программный блок Ж, который обеспечивает выдачу графической информации по каналам ARINC 664 через третьи и четвертые группы входов-выходов второго вычислительного модуля соответствующей пары вычислительных модулей на систему индикации.
Обеспечение высокой надежности и отказоустойчивости платформы достигается использованием совместно двух программных средств контроля и реконфигурации:
- программных средств встроенного контроля в каждом вычислительном модуле каждой пары (программные модули К1 и К2). Результаты встроенного контроля от программных модулей К1 и К2 передаются в программный модуль В;
- распределенного программного автомата контроля и реконфигурации в программных модулях В, реализованного, например, как многоканальные структуры с автоматом межканального обмена, программного контроля и восстановления информации в каналах (АМКВИ) (см. статью «IOTS-подход: анализ вариантов структур отказоустойчивых бортовых комплексов при использовании электронных компонентов Industry», http://www.chip-news.ru/archive/chipnews/200307/index.html).
Распределенный программный автомат контроля и реконфигурации устанавливают во все вычислительные модули платформы (в программные модули В). Этот программный автомат производит мониторинг работы всех пар модулей платформы и обеспечивает взаимный обмен результатами вычислений и результатами встроенного контроля в реальном масштабе времени. На основе сравнения результатов работы всех модулей распределенный программный автомат контроля и реконфигурации исключает из работы неисправные модули и модули с искаженными результатами вычислений.
Работа пар вычислительных модулей первой и второй подсистем крейтов платформы интегрированной модульной авионики аналогична.
При этом достигается высокая степень надежности за счет четырехкратного резервирования работы всех пар вычислительных модулей и за счет двукратного резервирования первой и второй подсистем крейта платформы интегрированной модульной авионики.
При работе всех пар вычислительных модулей платформы интегрированной модульной авионики, содержащей два крейта, высокая степень надежности достигается за счет восьмикратного резервирования работы всех пар вычислительных модулей и за счет четырехкратного резервирования подсистем первого и второго крейта платформы интегрированной модульной авионики, содержащей два крейта.
Пример блок-схемы алгоритма работы платформы интегрированной модульной авионики приведен в приложении к заявке.
| название | год | авторы | номер документа |
|---|---|---|---|
| Блок вычислительный | 2019 |
|
RU2707701C1 |
| ПЛАТФОРМА ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ БОЕВЫХ КОМПЛЕКСОВ | 2014 |
|
RU2595507C2 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА СВЯЗИ И ОБМЕНА ДАННЫМИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2829898C1 |
| Способ динамической реконфигурации вычислительных комплексов модульной архитектуры | 2018 |
|
RU2694008C1 |
| МОДУЛЬНЫЙ БОРТОВОЙ КОМПЛЕКС СРЕДСТВ ЦИФРОВОЙ РАДИОСВЯЗИ | 2012 |
|
RU2514098C2 |
| МЕТОД РЕЗЕРВИРОВАНИЯ КАНАЛОВ КОНСТРУКТИВНО-ФУНКЦИОНАЛЬНЫХ МОДУЛЕЙ БОРТОВЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ В УСЛОВИЯХ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2021 |
|
RU2778366C1 |
| Блочная микропроцессорная централизация (БМПЦ) | 2023 |
|
RU2803696C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| АРХИТЕКТУРА СИСТЕМЫ ОТКАЗОУСТОЙЧИВОЙ КОММУТАЦИИ ИНФОРМАЦИИ | 2016 |
|
RU2665227C2 |
Изобретение относится к технике обработки цифровых данных с помощью электрических устройств и может быть использовано при разработке устройств для программного управления блоков и систем летательных аппаратов, например самолетов гражданской авиации. Техническим результатом является увеличение надежности устройства. Платформа интегрированной модульной авионики выполнена в виде одного или двух крейтов, содержащих две подсистемы с установленными в каждой подсистеме коммутатором и двумя парами вычислительных модулей. 1 з.п. ф-лы, 2 ил.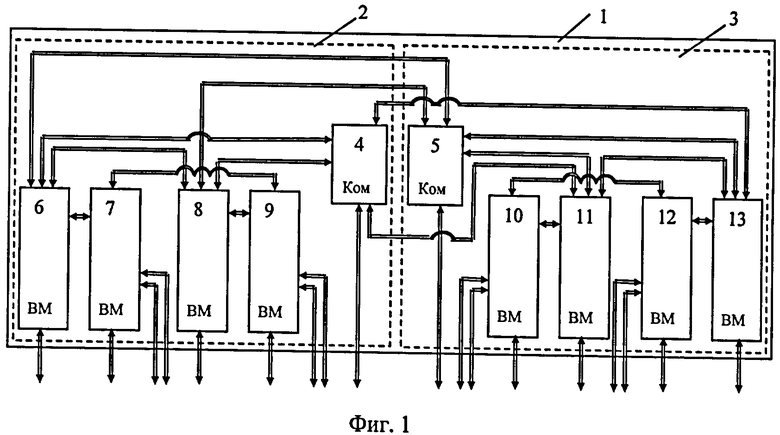
1. Платформа интегрированной модульной авионики, выполненная в виде одного или двух крейтов, содержащих по две подсистемы с установленными в каждой коммутатором и двумя парами вычислительных модулей, причем первый и второй вычислительные модули каждой пары соединены между собой первыми группами входов-выходов, а первые и вторые вычислительные модули первой пары каждой подсистемы - вторыми группами входов-выходов подключены ко вторым группам входов-выходов соответственно первого и второго вычислительных модулей второй пары соответствующей подсистемы, при этом первые вычислительные модули первой и второй пары третьими группами входов-выходов соединены соответственно с первой и второй группами входов-выходов коммутатора своей подсистемы, а четвертыми группами входов-выходов подключены соответственно к третьим и четвертым группам входов-выходов коммутатора другой подсистемы крейта, причем вторые вычислительные модули первой пары вычислительных модулей третьими и четвертыми группами входов-выходов соединены соответственно с первыми и вторыми группами входов-выходов, а вторые вычислительные модули второй пары вычислительных модулей своими третьими и четвертыми группами входов-выходов подключены соответственно к третьей и четвертой группам входов-выходов соответствующей подсистемы, при этом коммутаторы своей пятой группой входов-выходов, а первый и второй вычислительные модули каждой пары вычислительных модулей каждой подсистемы своей пятой группой входов-выходов соединен соответственно с пятой по девятую группами входов-выходов соответствующей подсистемы крейта, причем с первой по девятую группы входов-выходов первой подсистемы крейта подключены к соответствующим с первой по девятую группам входов-выходов платформы интегрированной модульной авионики, с десятой по восемнадцатую группы входов-выходов которой соединены соответственно с первой по девятую группами входов-выходов второй подсистемы крейта.
2. Платформа интегрированной модульной авионики по п.1, содержащая два крейта, при этом коммутаторы первой и второй подсистем первого крейта своими шестыми группами входов-выходов соответственно подключены к шестым группам входов-выходов коммутаторов первой и второй подсистем второго крейта, причем с первой по восемнадцатую группы входов-выходов платформы интегрированной модульной авионики соединены с соответствующими с первой по восемнадцатую группами входов-выходов первого крейта, а с девятнадцатой по тридцать шестую группы входов-выходов платформы подключены к соответствующим с первой по восемнадцатую группам входов-выходов второго крейта.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| «Multi-Modal Digital Avionics for Commercial Applications», разделы 11.3.1-11.3.4, рис.11.6, http://acast.grc.nasa.gov/main/documents/acast/mmda-reports, 28.09.2007 | |||
| ЕР 0807888 A1, 19.11.1997 | |||
| СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ КОМАНДИРА КОРАБЛЯ | 1996 |
|
RU2133498C1 |

