Изобретение относится к вычислительным системам и предназначено для резервирования конструктивно-функциональных модулей (КФМ) бортовых цифровых вычислительных систем (БЦВС) летательных аппаратов (ЛА) в концепции интегрированной модульной авионики (ИМА). Может использоваться как отдельная многоканальная адаптированная диагностическая система вычислителей, совместно с узлами поддержки модулей, работающая в режиме «диагностика», так и для функционирования в режиме имитации работы объекта контроля отказавшего канала, в случае отказа последнего - «работа в режиме БЦВС».
Известен метод резервирования, реализуемый в резервированной двухпроцессорной вычислительной системе и содержащий два идентичных канала и схему сравнения. Каждый канал содержит элемент ИЛИ, выход которого подключен к первому входу триггера и первому входу временного анализатора исправности, вход которого подключен к выходу импульсного генератора, а выход к первому входу счетчика сбоев и второму входу триггера, выход которого подключен к первому входу элемента ИЛИ-НЕ, первый выход счетчика сбоев подключен ко второму входу элемента ИЛИ-НЕ, второй выход счетчика сбоев первого канала подключен к первому входу схемы сравнения, второй выход счетчика сбоев второго канала подключен ко второму входу схемы сравнения, первый выход схемы сравнения подключен к третьему входу элемента ИЛИ-НЕ первого канала, второй выход схемы сравнения подключен к третьему входу элемента ИЛИ-НЕ второго канала, выход элемента ИЛИ-НЕ первого канала является первым выходом устройства резервирования и подключен к коммутатору первого канала, выход элемента ИЛИ-НЕ второго канала является вторым выходом устройства резервирования, предназначенным для управления коммутатором второго канала, первый вход элемента ИЛИ является входом устройства резервирования и подключен к выходу процессора, второй вход элемента ИЛИ является вторым входом устройства резервирования и подключен к выходу схемы начальной установки.
Этот метод реализован в устройстве, используемом в резервированной двухпроцессорной вычислительной системе и содержащем два идентичных канала и схему сравнения описанный в патенте на изобретение [Патент G06F №2264648, опубл. 02.12.2003].
Недостатком описанного аналога является сложность увеличения числа переключений между каналами. Так, например, для двухразрядной схемы сравнения максимальное число переключений между каналами составляет 7. Увеличение числа переключений может быть обеспечено только за счет увеличения разрядности счетчиков сбоев, усложнения схемы сравнения и увеличения числа линий от схемы сравнения, предназначенных для связи со счетчиками сбоев основного и резервного каналов. В прототипе, при двухразрядных счетчиках сбоев, от каждого канала для связи со схемой сравнения требуются по две линии. При трехразрядных счетчиках сбоев - по три линии и т.д. Увеличение числа межканальных связей от схемы сравнения и усложнение схемы сравнения приводят к усложнению устройства резервирования и снижению надежности.
Известен наиболее близкий к заявляемому методу резервирования метод, на основе самодиагностируемой трехканальной резервированной вычислительной системе. Повышение надежности, отказоустойчивости обеспечивается за счет диагностирования работоспособности активного канала процессором самого канала в процессе периодического решения диагностической задачи в фиксированные интервалы времени, аналогичной штатной с заданными исходными данными, сравнения результата решения диагностической задачи с заранее известным результатом, и, в случае совпадения, формирования процессором импульса исправности активного канала, анализа периода следования импульсов исправности и формирования сигнала для подключения резервного канала, в случае выхода из строя любого работающего канала [Патент RU №2527191, опубл. 02.09.2013].
Недостатками этого метода резервирования, за счет правильности проверки решения не основной задачи, а вспомогательной (второстепенной, что не является достоверной проверкой корректности обработки программного кода) являются необходимость использования устройства формирования сигналов выборки канала, устройства аварийного запуска, что, в случае выхода их из строя в процессе старения или помехового воздействия, не позволяет подключить резервный канал и, следовательно, приводит к снижению надежности, отказоустойчивости и стойкости системы к изменяющимся внешним факторам.
Способ обеспечивает повышение отказоустойчивости за счет применения многоканального мониторинга интеллектуальной диагностической системой в режиме реального масштаба времени каналов обработки программного кода КФМ, что позволяет при достижении значения контролируемого параметра программного кода границ допусков функциональной зависимости (границ работоспособного состояния) заблаговременно реконфигурировать отказавший информационный канал КФМ (канал, в котором возник сбой) и использовать интеллектуальную диагностическую систему (НДС) в режиме работы отказавшего канала БЦВС с индикацией о реконфигурации на функционирование ИДС летному экипажу.
Технический результат изобретения достигается тем, что в методе резервирования каналов КФМ БЦВС на основе ИДС реализуется принцип функционирования в интересах решения задачи автоматического построения модели подлежащего программной реконфигурации канала обработки информации за счет применения систем искусственного интеллекта, управляемого нейроконтроллером, что позволяет заблаговременно реконфигурировать отказавший канал КФМ на доступные вычислительные ресурсы ИДС в режиме БЦВС. При этом в ИДС происходит обучение (формирование моделей правильного функционирования КФМ БЦВС, функционирования в предотказном состоянии, функционирования в режиме отказа); запоминание (создание базы данных, включающих сформированные модели правильного функционирования КФМ); распознавание состояний, в том числе предотказного состояния и отказа (распознавание образа, распределение текущей информации по классам), а также работа в режиме имитации БЦВС.
Сущность изобретения заключается в том, в что ИДС, построенной на основе алгоритмов систем искусственного интеллекта, и представленной в виде программного кода, происходит ее обучение в режиме реального масштаба времени. С определенной дискретностью через блок формирования обучающей выборки поступают числовые массивы данных входных и выходных сигналов каждого канала КФМ, с последующим построением функциональных зависимостей данных выходных сигналов каждого канала КФМ БЦВС от входных и определением границ допусков функциональных зависимостей. Принцип формирования, а также назначения двусторонних упреждающих допусков функциональных зависимостей обработки информации КФМ БЦВС интегрированной авионики на предотказное состояние (при использовании ИДС) заключается в системе функционирования и архитектуре проектирования БЦВС в классе структур интегрированной авионики пятого поколения, в которой заложены алгоритмы присвоения более высокого ранга тем подсистемам управления информационного обеспечения ЛА, которые в большей степени соответствуют повышению эффективности использования ЛА в целом. При использовании ИДС, от конструктивно-функциональных модулей БЦВС в коммутатор через МКИО поступают управляющие сигналы, пропорциональные рангу диагностируемым КФМ, и обратно пропорциональные значению упреждающих допусков: чем выше ранг диагностируемого с помощью ИДС КФМ - тем меньше значение упреждающего допуска. Таким образом, осуществляется автоматическая адаптация ИДС к перераспределению ранга каналов обработки информации КФМ, с возможностью формирования упреждающих допусков различного значения на предотказное состояние. Предлагаемая ИДС будет представлять собой стандартный крейт (платформу) в виде отдельного однопроцессорного вычислительного модуля унифицированной и открытой архитектуры, в основе функционирования которого заложены алгоритмы обработки входной информации многослойными искусственными нейронными сетями, программное обеспечение функционирования которых хранится в ПЗУ и используется по назначению в режиме реального времени при взаимодействии с конструктивно-функциональными модулями через МКИО комплекса.
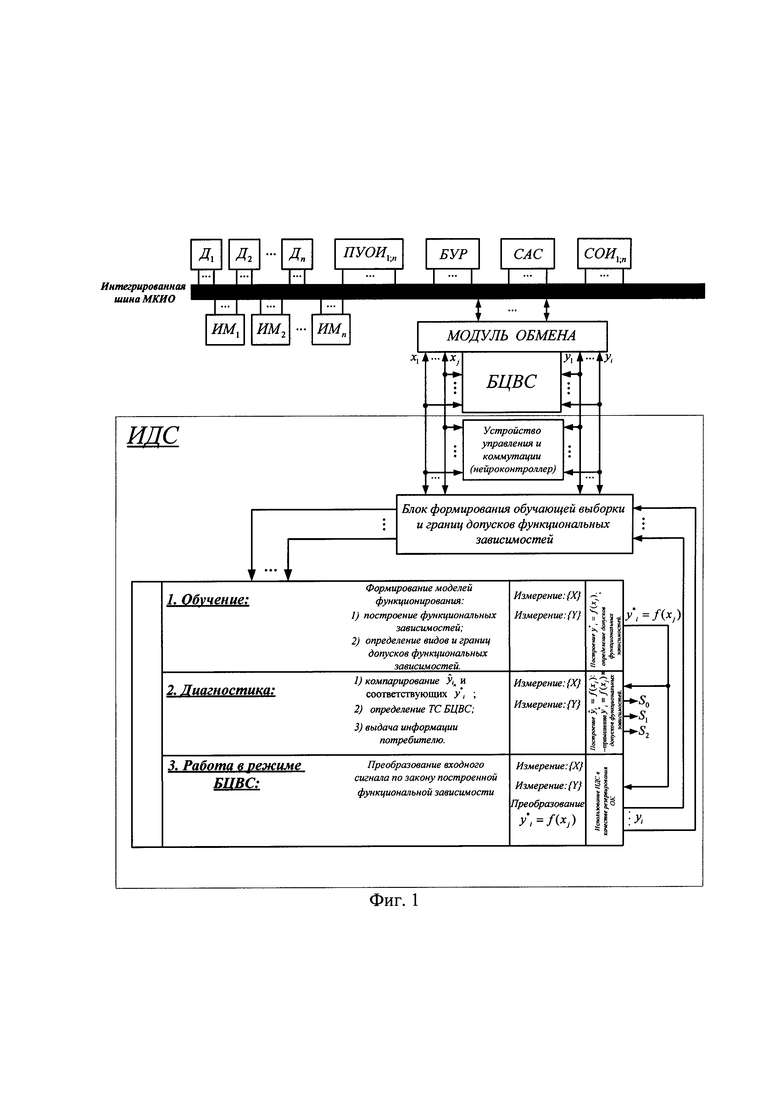
На фиг. 1 показана структурная схема ИДС во взаимодействии с элементами комплекса бортового оборудования (КБО) ЛА, БЦВС и интегрированной шиной в виде мультиплексного канала информационного обмена (МКИО) комплекса: Д1,Д2,…,Дn - датчики систем; ПУОИ1;п - первичные устройства обработки (преобразования) информации; ИМ1,ИМ2,…,ИМn - исполнительные механизмы; БУР - бортовое устройство регистрации параметрической информации общего назначения; САС - система аварийной, предупреждающей и уведомляющей сигнализации; СОИ1;n - системы отображения информации; x1…xj - входные сигналы БЦВС; y1…yi - выходные сигналы БЦВС; {X},{Y} - множества измеряемых входных и выходных параметров,  - функциональные зависимости, описывающие связь выходных и входных сигналов,
- функциональные зависимости, описывающие связь выходных и входных сигналов,  - текущие функциональные зависимости, описывающие связь выходных и входных сигналов, ТС БЦВС - техническое состояние контролируемого канала БЦВС, S0,S1,S2 - состояния системы, yi - выдача параметров потребителю. Данная структура раскрывает способ взаимодействия ИДС, информационно-управляющих, информационно-преобразующих, а также информационно-обеспечивающих составляющих КБО ЛА интегрированной авионики.
- текущие функциональные зависимости, описывающие связь выходных и входных сигналов, ТС БЦВС - техническое состояние контролируемого канала БЦВС, S0,S1,S2 - состояния системы, yi - выдача параметров потребителю. Данная структура раскрывает способ взаимодействия ИДС, информационно-управляющих, информационно-преобразующих, а также информационно-обеспечивающих составляющих КБО ЛА интегрированной авионики.
На фиг. 2 показан алгоритм функционирования ИДС, в котором посредством устройства управления (нейроконтроллера) подаются управляющие воздействия на блок формирования обучающей выборки и границ допусков, а также осуществляется управление переключением работы отказавшего канала цифрового вычислительного устройства на ИДС, имеющую возможность работать в режиме ОК как при выходе из строя канала цифрового вычислительного устройства, так и возникновении сбоев. Устройство управления также подает управляющие сигналы на устройство ввода и вывода для формирования обучающей выборки для ИДС.
На фиг. 3 показана реализация принципа формирования допуска функциональной зависимости, различающего состояния S0 и S1:S0 - работоспособное состояние; S1 - неработоспособное состояние; у=2х - эталонная функциональная зависимость; у=2х+1 - верхняя граница допуска функциональной зависимости; у=2х-1 - нижняя граница допуска функциональной зависимости.
На фиг. 4 показана реализация устройства управления и коммутации (нейроконтроллера) с прямым инверсным нейроуправлением: у(к) - выходной сигнал канала КФМ БЦВС; um(k) - управляющий сигнал ИНС; Δ - ошибка управления; u(t) - тестовый сигнал (случайный); X(k-1) - предыдущее состояние объекта управления; eu(k) - ошибка обучения. Задавая соответствующий алгоритм обучения для ИНС соответствующего типа, производится автоматический подбор синаптических весовых коэффициентов с целью корректировки процедуры обучения нейроконтроллера по сигналам БЦВС и корректирующего воздействия.
На фиг. 5 показана архитектура построения ИДС: X1,X2,X3,Xi1,Xi2,Xi3 - входные сигналы системы от КФМ; Wl,W2,W3,Wj1,Wj2,Wj3 - синаптические весовые коэффициенты ИНС;  - блоки суммирования;
- блоки суммирования;  - блоки нелинейного преобразования (активационная функция); Y1,…,Yk - выходные (обработанные ИНС) сигналы системы; CPU - центральный процессор системы ИДС; ПЗУ - постоянное запоминающее устройство; ОЗУ - оперативное запоминающее устройство; СПЭП - система преобразования электрического питания системы; РК - разовая команда; ПО функционирования ИНС - программное обеспечение функционирования искусственных нейронных сетей; МКИО - мультиплексный канал информационного обмена.
- блоки нелинейного преобразования (активационная функция); Y1,…,Yk - выходные (обработанные ИНС) сигналы системы; CPU - центральный процессор системы ИДС; ПЗУ - постоянное запоминающее устройство; ОЗУ - оперативное запоминающее устройство; СПЭП - система преобразования электрического питания системы; РК - разовая команда; ПО функционирования ИНС - программное обеспечение функционирования искусственных нейронных сетей; МКИО - мультиплексный канал информационного обмена.
Способ реализуется следующим образом.
При подаче электропитания от системы преобразования электропитания, центральный процессор (CPU) выполняет инициализацию входящих в ее состав компонентов (микросхем программируемой логики, микроконтроллера). Начало процесса обучения системы осуществляется подачей разовой команды (РК) в микроконтроллер, и, согласно установленному протоколу информационного обмена между бортовой локальной сетью КБО и КФМ БЦВС, через МКИО и коммутатор в постоянном запоминающем устройстве формируется база файлов эталонных входных и выходных массивов данных при работе каждого конкретного канала обработки информации КФМ с установленной адресацией ячеек ПЗУ. После инициализации центральный процессор (CPU) принимает из постоянного запоминающего устройства (ПЗУ) функциональное программное обеспечение ИНС, и по внутренней локальной сети и заносит его в свое внутреннее оперативное запоминающее устройство (ОЗУ). При формировании базы данных эталонных обучающих массивов входов и выходов диагностируемых модулей входные и выходные сигналы, обработанные соответствующим алгоритмом ИДС через физический модульный интерфейс информационного обмена (МКИО) и коммутатор поадресно формирует в ячейках ПЗУ файлы алгоритм-программ преобразования информации каждым каналом КФМ, а также эталонные базы данных входных и выходных сигналов КФМ. После обучения ИДС используется как система активного мониторинга функционирования КФМ БЦВС. При приближении входных (выходных) сигналов границы допуска функциональной зависимости устройство управления и коммутации (нейроконтроллер), фиксируя данное отклонение, подает управляющее воздействие в ИДС на переключение отказавшего канала конструктивно-функционального модуля (канала, в котором возник сбой при обработке программного кода) и переход ИДС в «режим работы БЦВС».
Задача резервирования бортовых цифровых вычислительных систем решается использованием в ИДС и нейроконтроллере многослойных однонаправленных искусственных нейронных сетей прямого распространения с сигмоидальной функцией активации нейронов в скрытом слое, и линейной функцией активации нейронов в выходном слое, а также многослойные радиальные базисные сети, которые используются для решения задач классификации образов, что позволяет согласовать входные и выходные данные по законам построенных неявно-выделенных аналитических функциональных зависимостей, тем самым выполнять информационные преобразования сигналов вычислителей полном объеме. Помимо этого, основное преимущество использования ИДС состоит в упрощении процесса подключения резервного элемента (ИДС) в случае возникновения отказа или сбоя в вычислителе, а также отсутствии этапа алгоритмизации при функционировании ИДС в «режиме БЦВС», который заменяется этапом обучения, что позволяет решать, как группы формализуемых задач, так и неформализуемых, которые не имеют описанного алгоритма решения, либо этот алгоритм требует чрезмерных вычислительных ресурсов.
В ИДС используется алгоритм обратного распространения ошибки, который является обобщением дельта-правила. Данный алгоритм позволяет обучать искусственные нейронные сети с любым числом слоев. В таком алгоритме используется разновидность градиентного спуска, перестраивая веса в направлении минимума ошибки. При использовании такого алгоритма обучения предполагается, что в качестве активационной функции используется сигмоидальная функция. Эта функция позволяет экономить вычислительные затраты, поскольку имеет простую производную:

где F(y) - функция активации нейронов. Сигмоидальная функция ограничивает значением единица сильные сигналы и усиливает слабые. Алгоритм включает в себя такую же последовательность действий, как и при обучении персептрона. Сначала веса межнейронных связей получают случайные значения, затем выполняются следующие шаги:
1) выбирается обучающая пара (X, Z*), X подается на вход;
2) вычисляется выход сети Z=F(Y);
3) рассчитывается ошибка выхода Е;
4) веса сети корректируются с целью минимизации ошибки;
5) возврат к п. 1 и т.д., пока не будет минимизирована ошибка по всем обучающим парам.
Шаги 1 и 2 - это прямое распространение по сети, а шаги 3 и 4 - обратное.
Классический градиентный метод поиска минимума функции ƒ(X):

где X - вектор, состоит в изменении аргумента в направлении антиградиента;
η - переменная скорость обучения.
Для выходного слоя можно записать:

где V - выходной вектор нейронной сети;
E(V) - вектор ошибок.
Таким образом, вес υjk, связывающий j-й нейрон скрытого слоя и k-й нейрон выходного, корректируется по формуле:

Ошибка выхода может быть описана следующим образом:

Очевидно, что Е явно не зависит от V, но для получения производной можно использовать правила дифференцирования сложной функции:

где uj - выход j-го нейрона скрытого слоя 
Таким образом, формула для коррекции весов выходного слоя приобретает вид:

Рассмотрим далее коррекцию весов скрытого слоя. Здесь используется формула:

где wij(t) - весовая функция i-го нейрона j-го слоя.
Выход нейрона скрытого слоя описывается формулой:

По аналогии с формулой для выходного слоя можно записать:

Однако величина ошибки для скрытого слоя Δj не задана, следовательно, не ясно, каким должен быть эталонный выход скрытого слоя. В то же время очевидно, что ошибки выходного слоя зависят от ошибки скрытого слоя ИНС, и это влияние тем больше, чем больше вес связи между нейроном скрытого слоя и выходным нейроном. Таким образом, оценку ошибки нейрона скрытого слоя можно получить как взвешенную сумму ошибок выходного слоя:
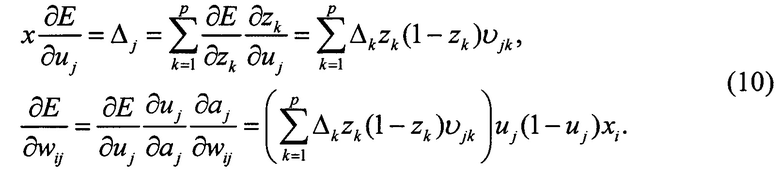
Тогда формула для коррекции весов скрытого слоя окончательно приобретает следующий вид:

Работу данного алгоритма можно улучшить, учитывая вторые производные активационной функции. Ускорения работы алгоритма можно добиться при использовании переменной скорости обучения η. В начале работы алгоритма обучения с обратным распространением ошибки ее величина имеет значение, близкое к единице, а затем последовательно уменьшается примерно до 0,01. Это позволяет быстро подойти к окрестности минимума, а затем точно попасть в него.
Таким образом, применение ИДС, работающей в режиме БЦВС (функционирования отказавшего канало КФМ БЦВС) позволит решать задачи каналов цифровой вычислительной системы в полном объеме, что позволяет автоматизировано реконфигурировать отказавший канал на работу ИДС в режиме БЦВС. При этом в ИДС происходит обучение (формирование моделей правильного функционирования КФМ БЦВС, функционирования в предотказном состоянии, функционирования в режиме отказа); запоминание (создание базы данных, включающих сформированные модели правильного функционирования КФМ); распознавание состояний, в том числе предотказного состояния и отказа (распознавание образа, распределение текущей информации по классам), а также работа в режиме имитации БЦВС с упрощением процесса переключения с отказавшего основного канала вычислителя на резервный (ИДС) без этапа алгоритмизации обработки данных, предварительно обучившись на основе входных и выходных наборах данных и, являясь при этом самостоятельной системой, предназначенной для решения задач диагностики технического состояния вычислительных устройств.


Изобретение относится к способу резервирования каналов конструктивно-функциональных модулей (КФМ) бортовых цифровых вычислительных систем (БЦВС) летательных аппаратов (ЛА) на основе интеллектуальной диагностической системы (ИДС) в условиях интегрированной модульной авионики. Технический результат заключается в повышении надежности работы бортовых цифровых вычислительных систем. В способе посредством устройства управления, представляющего собой нейроконтроллер, в режиме реального времени выполняют обучение ИДС, где ИДС и нейроконтроллер используют многослойные однонаправленные искусственные нейронные сети прямого распространения с сигмоидальной функцией активации нейронов в скрытом слое, и линейной функцией активации нейронов в выходном слое, а также многослойные радиальные базисные сети, в процессе упомянутого обучения с определенной дискретностью с помощью устройства управления подают на блок формирования обучающей выборки и границ допусков данные входных и выходных сигналов каждого канала КФМ с последующим построением функциональных зависимостей данных выходных сигналов каждого канала КФМ БЦВС от входных сигналов и определением границ допусков функциональных зависимостей, представляющих собой границы работоспособного состояния каналов КФМ, при этом присваивают более высокий ранг тем КФМ, которые в большей степени соответствуют повышению эффективности использования ЛА, а границы допусков формируют таким образом, что чем выше ранг диагностируемого с помощью ИДС КФМ, тем меньше значение упреждающего допуска, в результате обучения формируют базы данных с данными о функционировании КФМ БЦВС в предотказном состоянии и в режиме отказа, после обучения ИДС посредством устройства управления с использованием сформированных баз данных фиксируют приближение входных и выходных сигналов каналов КФМ к границам допуска функциональной зависимости и подают управляющее воздействие в ИДС на переключение с отказавшего канала КФМ БЦВС на ИДС, переводя ИДС в режим работы в качестве резервного канала для отказавшего канала КФМ БЦВС. 5 ил.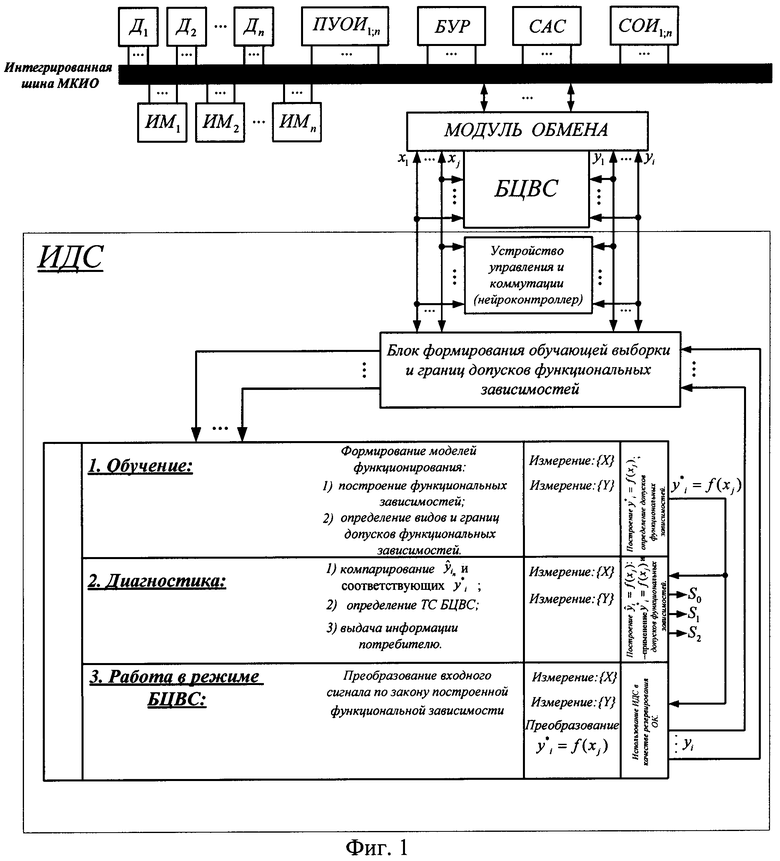
Способ резервирования каналов конструктивно-функциональных модулей (КФМ) бортовых цифровых вычислительных систем (БЦВС) летательных аппаратов (ЛА) на основе интеллектуальной диагностической системы (ИДС) в условиях интегрированной модульной авионики, содержащий этапы, на которых:
посредством устройства управления, представляющего собой нейроконтроллер, в режиме реального времени выполняют обучение ИДС, где ИДС и нейроконтроллер используют многослойные однонаправленные искусственные нейронные сети прямого распространения с сигмоидальной функцией активации нейронов в скрытом слое, и линейной функцией активации нейронов в выходном слое, а также многослойные радиальные базисные сети,
в процессе упомянутого обучения с определенной дискретностью с помощью устройства управления подают на блок формирования обучающей выборки и границ допусков данные входных и выходных сигналов каждого канала КФМ с последующим построением функциональных зависимостей данных выходных сигналов каждого канала КФМ БЦВС от входных сигналов и определением границ допусков функциональных зависимостей, представляющих собой границы работоспособного состояния каналов КФМ,
при этом присваивают более высокий ранг тем КФМ, которые в большей степени соответствуют повышению эффективности использования ЛА, а границы допусков формируют таким образом, что чем выше ранг диагностируемого с помощью ИДС КФМ, тем меньше значение упреждающего допуска,
в результате обучения формируют базы данных с данными о функционировании КФМ БЦВС в предотказном состоянии и в режиме отказа,
после обучения ИДС посредством устройства управления с использованием сформированных баз данных фиксируют приближение входных и выходных сигналов каналов КФМ к границам допуска функциональной зависимости и подают управляющее воздействие в ИДС на переключение с отказавшего канала КФМ БЦВС на ИДС, переводя ИДС в режим работы в качестве резервного канала для отказавшего канала КФМ БЦВС.
| РЕЗЕРВИРОВАННАЯ МНОГОКАНАЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2527191C1 |
| РЕЗЕРВИРОВАННАЯ ДВУХПРОЦЕССОРНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2003 |
|
RU2264648C2 |
| Многоканальная самодиагностируемая вычислительная система с резервированием замещением и способ повышения ее отказоустойчивости (варианты) | 2016 |
|
RU2634189C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

