Предлагаемое изобретение относится к спортивным тренажерам, в частности к устройствам для тренировки и обучения спортсменов армрестлеров.
Известно тренировочное устройство (1), содержащее прямоугольное основание, фиксируемое на плоской поверхности стола посредством регулировочных зажимов. На основании жестко закреплена опорная конструкция, внутри которой проходит цилиндрический шток, шарнирно связанный с подвижным рычагом. С противоположного конца шток переходит в Г-образную стойку, связанную посредством пружин с подвижным элементом натяжения.
Недостатки известного устройства заключаются в том, что оно обеспечивает только один режим работы - растягивание пружины, нет возможности регистрации двигательного действия с целью его анализа, нет возможности снятия и регистрации биомеханических характеристик.
Наиболее близким аналогом заявленного изобретения является устройство для тренировки спортсменов-армрестлеров (RU 2128539, А63В 21/00, 1999), содержащее телескопическую стойку, зафиксированную на столе армрестлинга, к которой прикреплены два рычага: нижний, расположенный перпендикулярно стойке и посаженный на втулку с фиксатором с возможностью перемещения вверх или вниз по стойке и фиксации, а верхний рычаг посажен на ось с возможностью подъема, переходя из горизонтального положения, задаваемого передвижным фиксатором, в вертикальное, и на верхнем торце телескопической стойки закреплен блок, установленный с возможностью подъема или спуска, фиксируя телескопическую стойку на разной высоте, рычаги снабжены отверстиями для зацепления пружин и троса, перекинутого через упомянутый блок, рукоятку, за которую спортсмен тянет трос на тренировке.
Недостатком известного решения является низкая эффективность подготовки спортсменов.
Задачей заявленного изобретения является повышение эффективности тренировки.
Технический результат, заключающийся в устранении указанных недостатков в устройстве для тренировки спортсменов-армрестлеров, содержащем телескопическую стойку, зафиксированную на столе армрестлинга, к которой прикреплены два рычага: нижний, расположенный перпендикулярно стойке и посаженный на втулку с фиксатором с возможностью перемещения вверх или вниз по стойке и фиксации, а верхний рычаг посажен на ось с возможностью подъема, переходя из горизонтального положения, задаваемого передвижным фиксатором, в вертикальное, и на верхнем торце телескопической стойки закреплен блок, установленный с возможностью подъема или спуска, фиксируя телескопическую стойку на разной высоте, рычаги снабжены отверстиями для зацепления пружин и троса, перекинутого через упомянутый блок, рукоятку, за которую спортсмен тянет трос на тренировке, достигается тем, что он имеет силовой датчик, установленный в разрыв троса для измерения и фиксирования натяжения троса, датчик перемещения троса, персональный компьютер, программное обеспечение которого обеспечивает работу датчиков, выполнение математических расчетов и устройства в целом, шесть дополнительных блочков, узел настройки троса, узел регулирования под руку спортсмена, элемент выборки слабины троса, один аналого-цифровой преобразователь и стабилизированный источник электропитания, причем в устройстве один конец троса закреплен через силовой датчик на верхнем торце телескопической стойки, а сам трос огибает дополнительный первый блочок, щечки которого зацеплены в отверстии верхнего рычага, огибает упомянутый блок, огибает дополнительный шестой блочок, закрепленный в узле регулировки под руку спортсмена, а вторым концом трос закреплен на узле настройки троса, датчик перемещения троса расположен на щечках третьего дополнительного блочка с отверстиями, расположенного на стойке выборки слабины троса, и соединен электрическим выходом с LPT-портом системного блока, а силовой датчик через аналого-цифровой преобразователь подключен электрически к внутренней шине системного блока и запитан, как и датчик перемещения троса, от стабилизированного источника питания.
Силовой датчик содержит основание, пружинный динамометр, потенциометр с линейным перемещением его движка, сочлененный со стрелкой пружинного динамометра и запитанный от параметрического стабилизатора напряжения, состоящего из стабилитрона и гасящего сопротивления, и информационный выход потенциометра через аналого-цифровой преобразователь соединен с системным блоком персонального компьютера.
Датчик перемещения содержит оптический датчик, состоящий из светоизлучающего элемента и световоспринимаемого элемента, расположенных на одной линии друг относительно друга, обеспечивающий засвечивание световоспринимающего элемента только при нахождении отверстия в колесике блочка между ними, и эти элементы связаны электрически с усилителем-формирователем и через транзисторный ключ - с LPT-портом системного блока персонального компьютера.
Телескопическая стойка под датчиком перемещения содержит основание, которое крепится к столу шурупами или винтами с гайками, квадратный патрубок, образующий телескопическую стойку с цилиндрической шпилькой, имеющей резьбу практически по всей ее длине, штифтовую канавку, опорную пластину, прикрепленную к верхней части шпильки, гайку, выбирающую слабину троса, опирающуюся на квадратный патрубок и ограничительные пластины, к которым крепится запорная пластина, в которой размещен штифт, препятствующий прокручиванию шпильки.
Узел регулировки под руку спортсмена содержит основание, которое крепится к столу шурупами или винтами с гайками, ось, прикрепленную к основанию двумя колодочками, в которых применены подшипники скольжения в каждой колодочке, и прикреплены эти колодочки к основанию двумя винтами с гайками каждая, и к оси прикреплен квадратный патрубок меньшего размера поперечного сечения, образующий с квадратным патрубком большего размера поперечного сечения телескопическую стойку с изменением и фиксацией ее длины с помощью штыря, отверстия в патрубке большего размера поперечного сечения и несколько отверстий в патрубке меньшего размера поперечного сечения, и к патрубку большего размера поперечного сечения прикреплена планка, к которой посредством винтов прикреплены щечки блочка, на которых размещено колесико блочка, посаженное через подшипник скольжения и винт с гайкой, являющейся осью данного блочка, и на патрубке большего размера поперечного сечения закреплена рукоятка, и трос огибает данный блочок.
Узел настройки троса содержит основание, которое крепится к столу шурупами или винтами с гайками, и к основанию прикреплен цилиндрический патрубок большего диаметра, образующий с цилиндрическим патрубком меньшего диаметра телескопическую стойку с плавным регулированием длины этой стойки, осуществляемой с помощью гайки, резьбы на патрубке меньшего диаметра, опорных пластин, запорной пластины и винтов с гайками, соединяющими запорную и опорные пластины, при этом для исключения прокручивания патрубка меньшего диаметра в нем сделана штифтовая канавка, а в запорной пластине размещен штифт, и к верхнему концу этого патрубка прикреплен держатель двух блочков, каждый из которых состоит из щечек, колесика, подшипника и стягивающего винта с гайкой, являющегося осью блочка, и крепится к держателю с помощью винтов, и трос между указанными колесиками, огибает блочок узла регулировки под руку спортсмена и возвращается к узлу настройки троса, где он фиксируется в фиксаторе, размещенном на держателе.
Заявляемое устройство поясняют схематические чертежи.
На фиг.1 приведено устройство в целом - вид спереди.
На фиг.2 показана информационная модель.
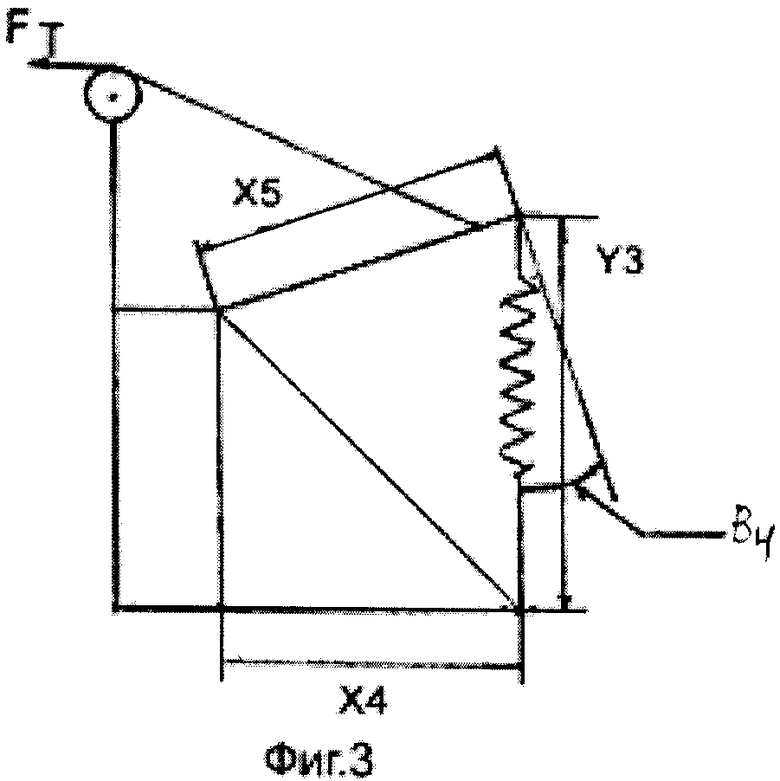
На фиг.3 изображено схематическое устройство для расчета момента упругого элемента.
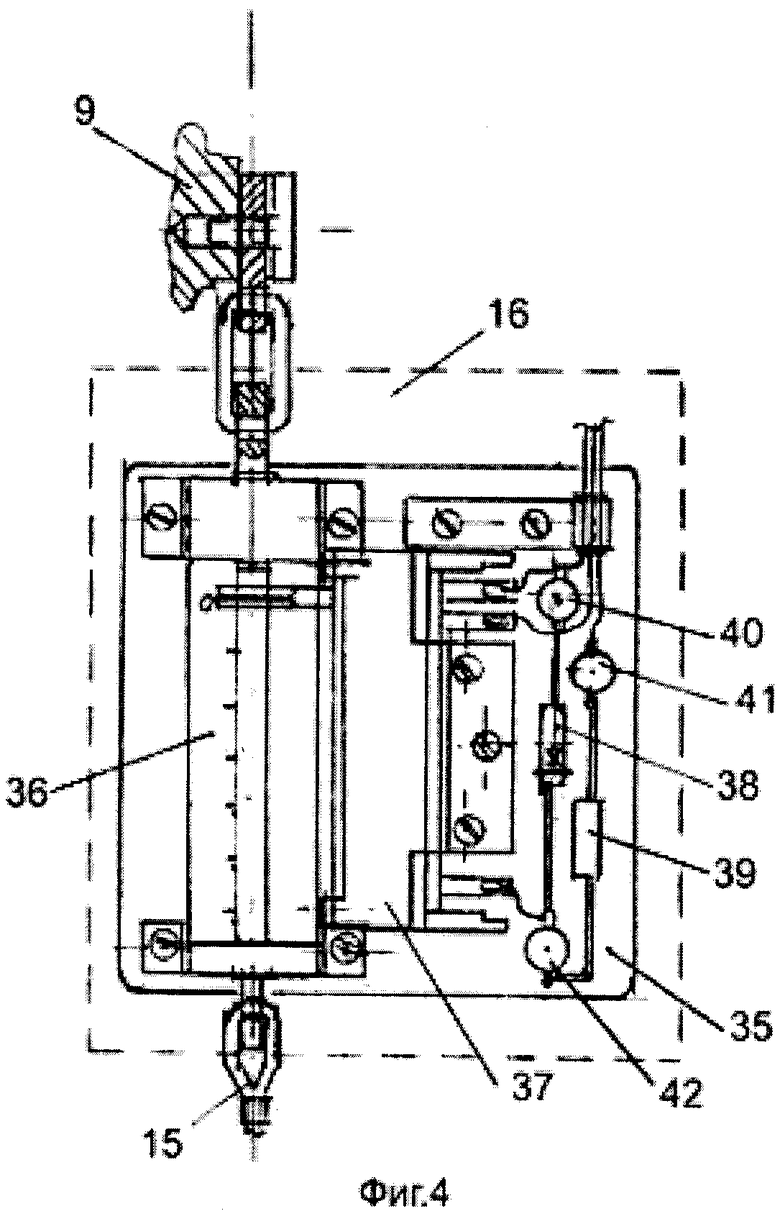
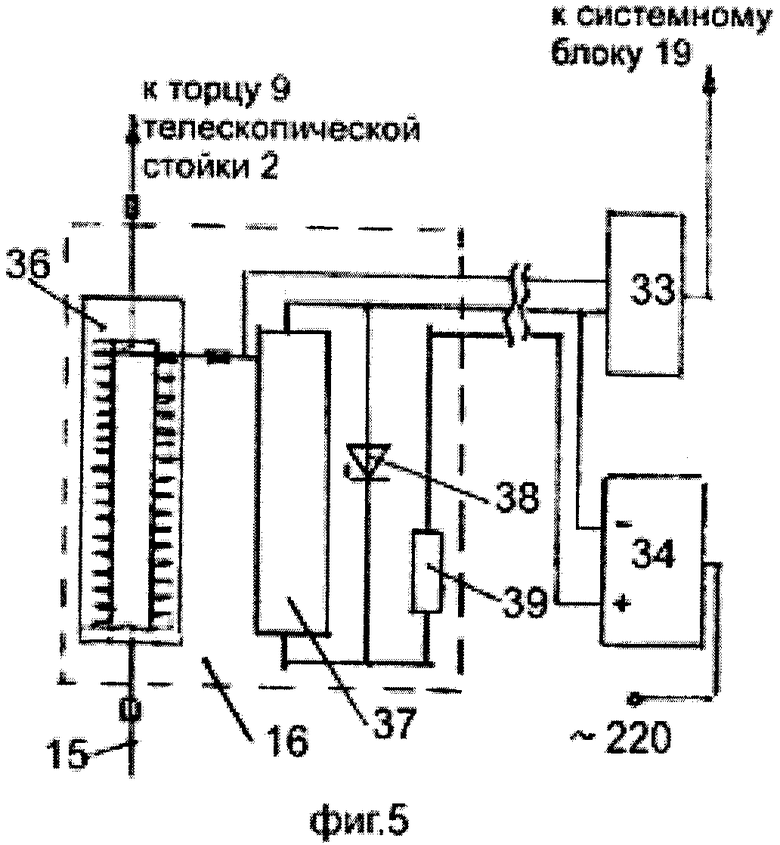
На фиг.4 представлена конструкция, а на фиг.5 - электрическая схема силового датчика 16.
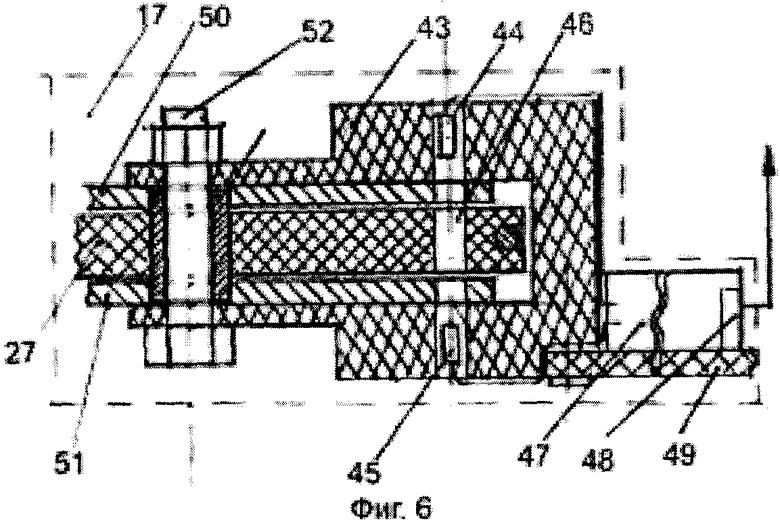
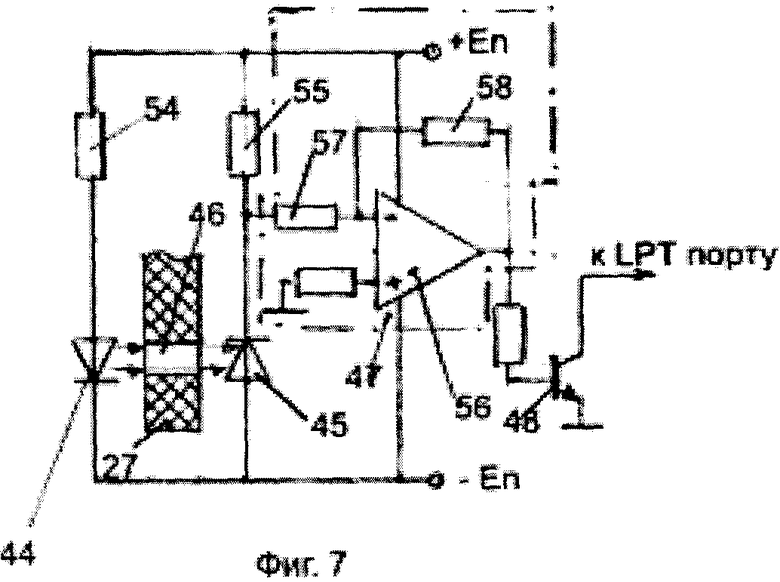
На фиг.6 приведена конструкция, а на фиг.7 - электрическая принципиальная схема датчика перемещения 17.
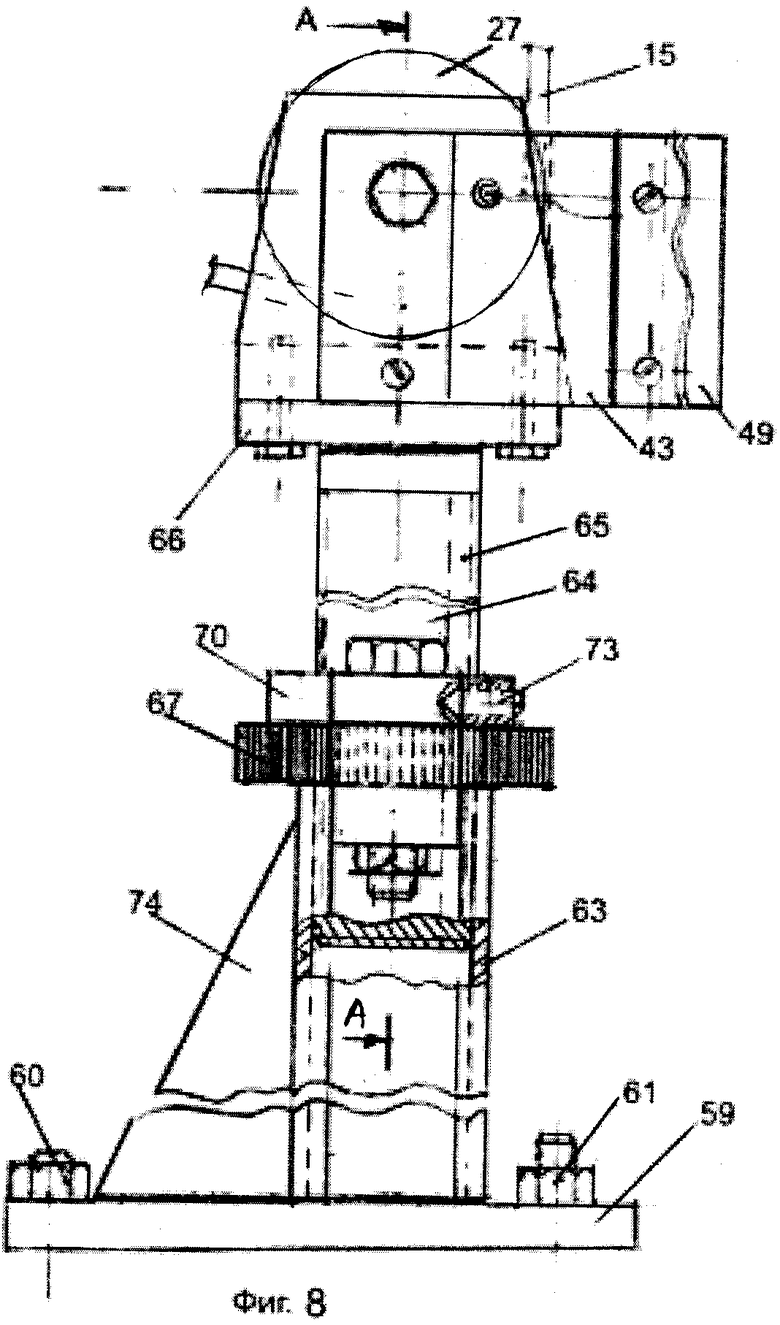
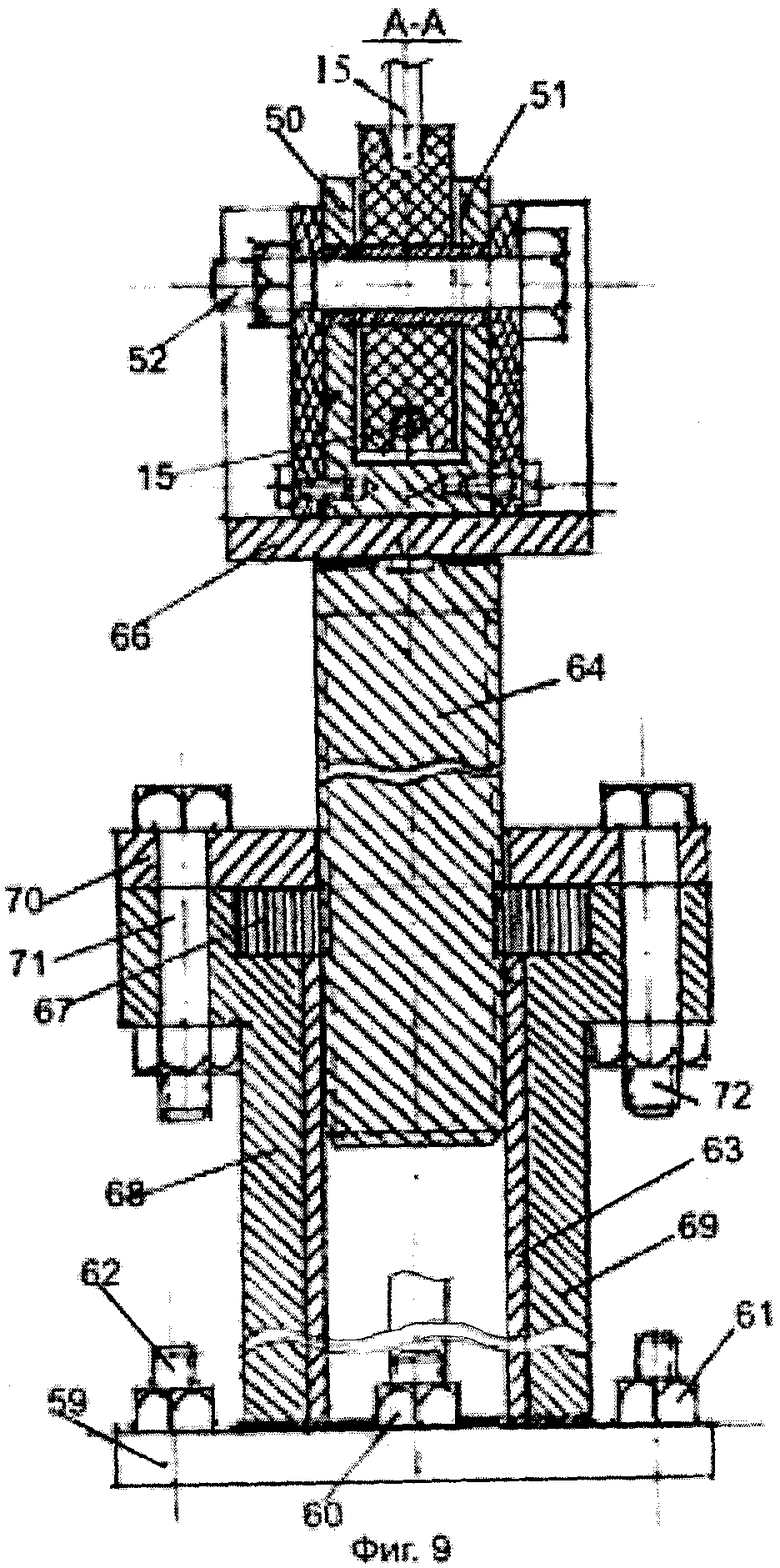
На фиг.8 изображена возможная конструкция телескопической стойки под датчиком перемещения 17 (вид спереди), а на фиг.9 - вид этой стойки сбоку слева.
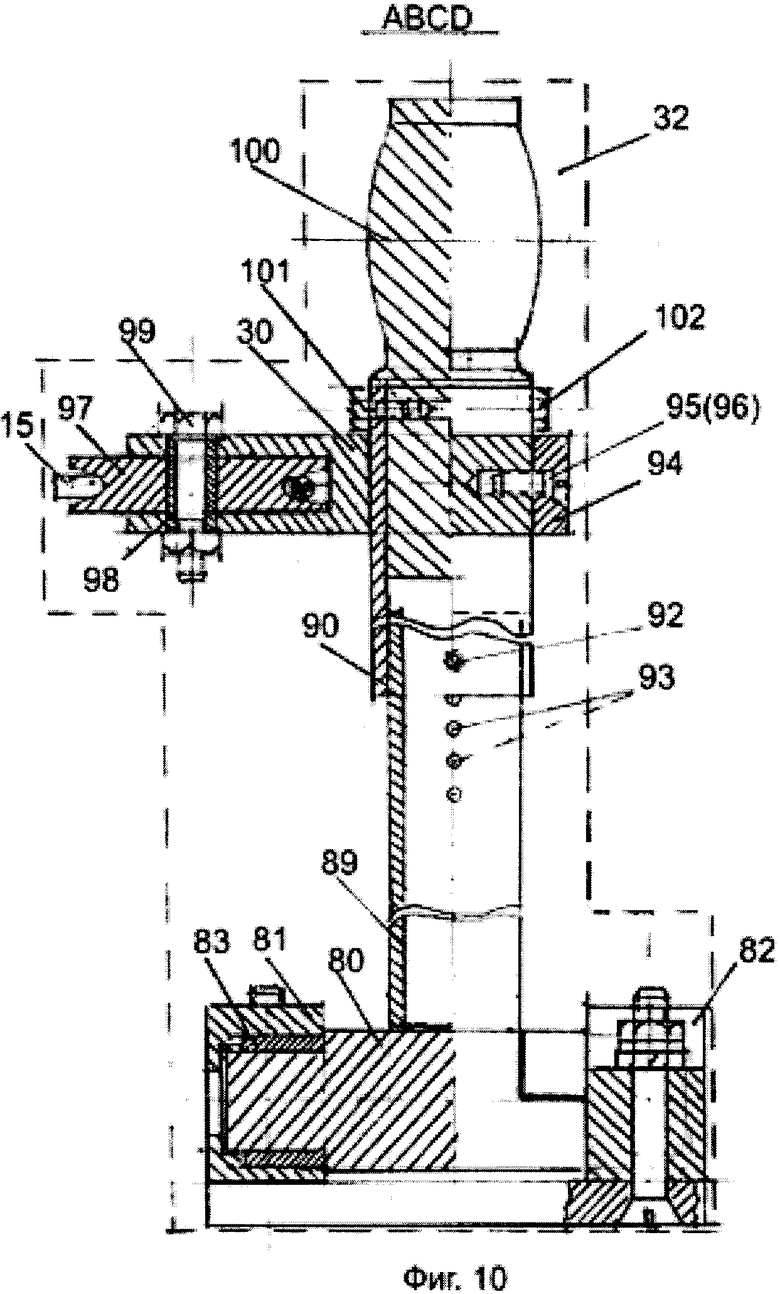
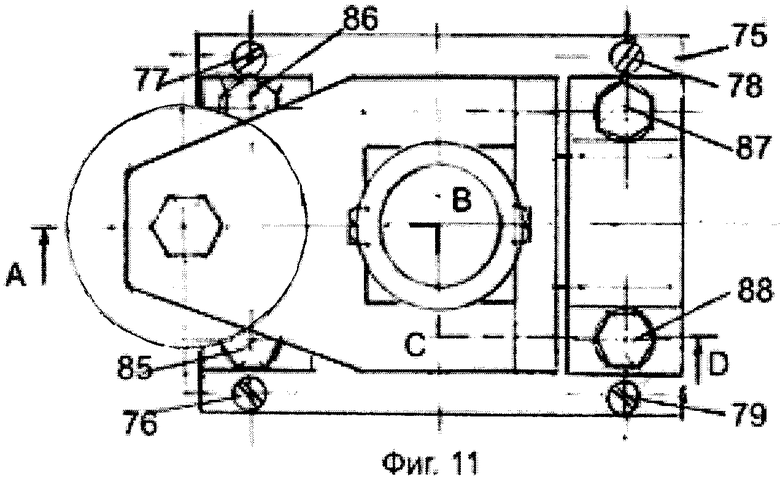
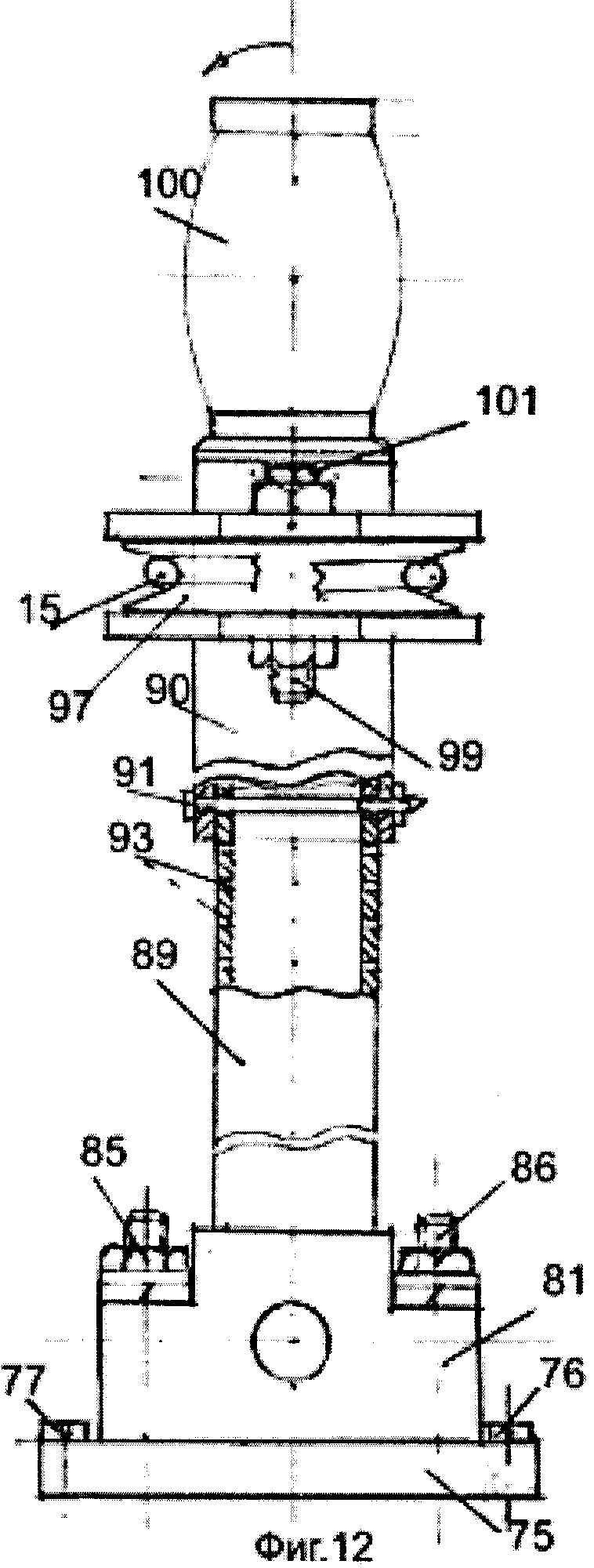
На фиг.10, 11 и 12 показана одна из возможных конструкций узла регулировки под руку спортсмена, где на фиг.10 дан вид узла спереди, на фиг.11 - вид сверху и на фиг.12 - вид сбоку слева.
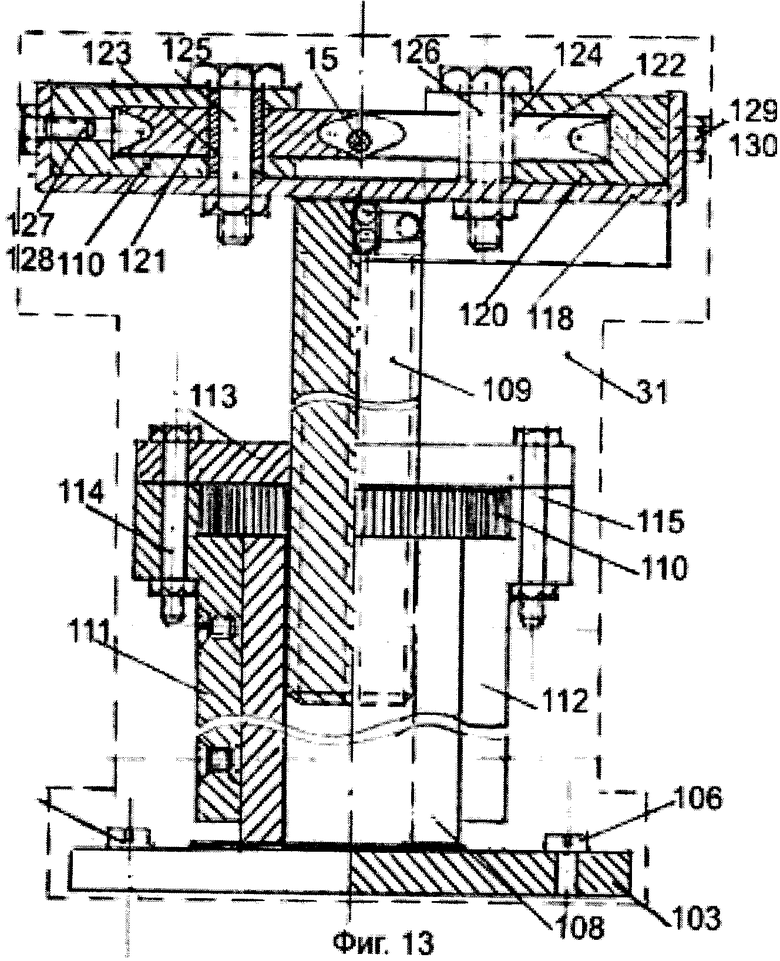
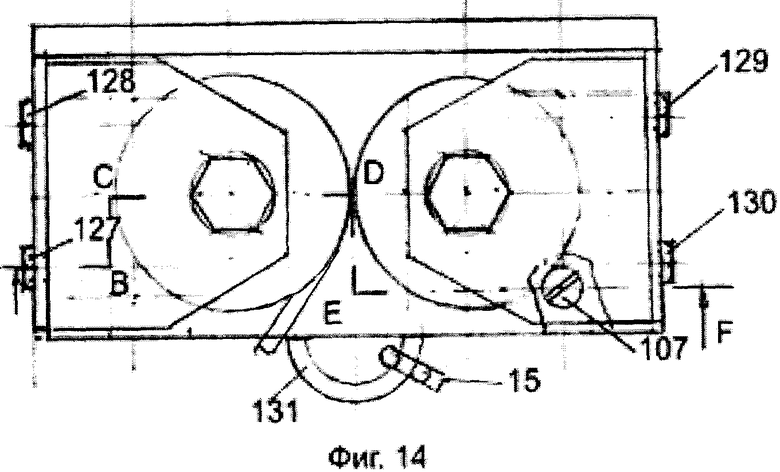
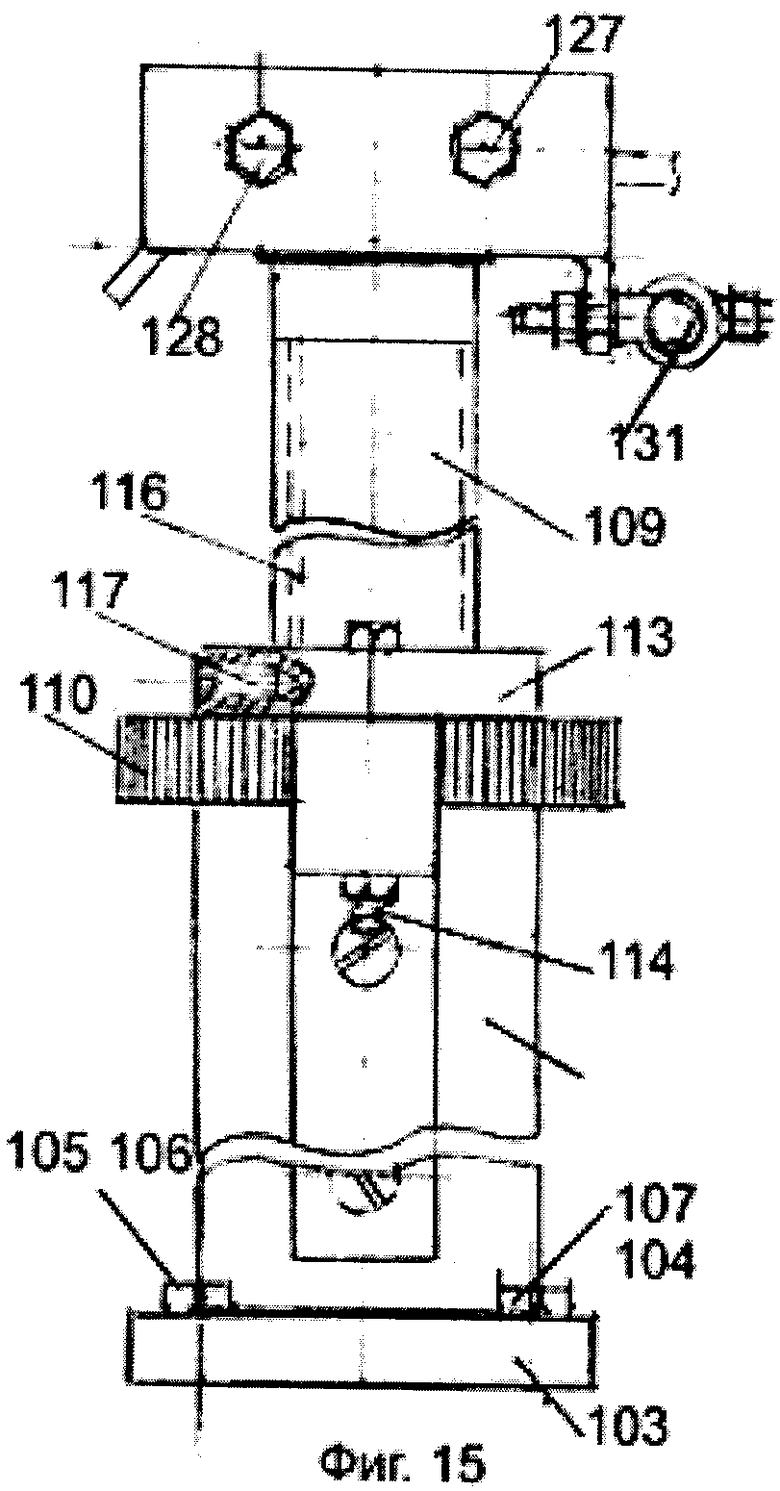
На фиг.13, 14 и 15 представлена одна из возможных конструкций узла настройки троса 31, где на фиг.13 показан вид узла спереди, на фиг.14 - вид сверху и на фиг.15 - вид сбоку слева.
Устройство включает в себя тренажер, персональный компьютер (фиг.1) и программное обеспечение. Тренажер 1 (оконтурен пунктирными линиями) содержит телескопическую стойку 2, зафиксированную на столе для армрестлинга 3, к которой прикреплены два рычага: нижний 4, расположенный перпендикулярно стойке 2 и посаженный на втулку 5 с фиксатором, работающим таким образом, что втулка 5 и рычаг 4 могут перемещаться вверх или вниз по стойке и фиксироваться, а верхний рычаг 6 посажен на ось 7 и может подниматься, переходя из горизонтального положения, задаваемого передвижным фиксатором 8, в вертикальное. На верхнем торце 9 телескопической стойки 2 закреплен блок 10, который можно поднять или опустить, фиксируя фиксатором 11 верхний торец 9 телескопической стойки 2 на разной длине.
Как нижний 4, так и верхний 6 рычаги снабжены отверстиями: верхний - 12, а нижний - 13, для закрепления пружин 14 и троса 15, перекинутого через упомянутый блок 10. В разрыв троса 15 вставлен силовой датчик 16, с помощью которого измеряется и фиксируется натяжение троса, а его перемещение - с помощью датчика 17. В устройство введен полный комплект персонального компьютера 18 (оконтурен штрихпунктирными линиями), включающий системный блок 19, дисплей 20, клавиатуру 21 и оптическую мышь 22. Программное обеспечение, записанное на дискете или диске, вставляется в системный блок 19, соответственно в дисководы 23 и 24, и при подготовке устройства к работе инициируется клавиатурой 21.
В тренажер 1 введены шесть блочков 25, 26, 27, 28, 29 и 30, узел настройки троса 31, узел регулировки под руку 32 спортсмена, один аналого-цифровой преобразователь (АЦП) 33 и стабилизированный источник электропитания 34.
Один конец троса 15 закреплен через силовой датчик 16 на верхнем торце 9 телескопической стойки 2. Сам трос 15 огибает первый блочок 25, щечки которого закреплены в отверстии 12 верхнего рычага 6, огибает упомянутый блок 10 и дополнительные второй блочок 26 и третий блочок 27, последний имеет отверстия для работы датчика перемещения троса 17, проходит между дополнительными блочками 28 и 29, установленными в узле настройки троса 31, огибает дополнительный шестой блочок 30, закрепленный в узле регулировки под руку 32 спортсмена, и вторым концом трос 15 закреплен на узле настройки троса 31.
При этом датчик перемещения 17 расположен на щечках дополнительного третьего блочка 27, в котором сделаны отверстия для работы самого датчика, и он соединен информационным выходом с LPT-портом системного блока 19 персонального компьютера 18, а выход силового датчика 16 через АЦП 33 подключен электрически к внутренней шине системного блока 19. И силовой датчик 16, и датчик перемещения троса 17 запитаны от стабилизированного источника электропитания 34.
Перед рассмотрением принципа работы устройства необходимо разобраться с узлом переменного сопротивления, реализуемым с помощью пружин, для которых справедлив закон Гука [2].
Рассмотрим узел переменного сопротивления с упрощающими допущениями: все элементы конструкции будем считать невесомыми, все (кроме пружин) нерастяжимыми, пренебрежем радиусами блока и блочков, силой трения и изменением коэффициента жесткости реальных пружин при их растяжении (фиг.2). При таких условиях систему можно считать квазистатической и применять к ней законы статики.
Момент (Mп), создаваемый пружиной, можно найти как произведение силы на плечо (фиг.2):

где Y20 - длина расслабленной пружины,
k - коэффициент жесткости пружины.
Момент, создаваемый тросом (Mт):


Значения  и
и  можно найти исходя из теоремы косинусов:
можно найти исходя из теоремы косинусов:
для β2 
где 
Y10 - значение величины Y1 при горизонтальном положении верхнего рычага,
X - перемещение рукоятки.
для β3

где 
Угол β находим также из теоремы косинусов:

Решая приведенные уравнения в системе, с учетом того, что моменты сил со стороны пружин и троса уравновешиваются, получаем силу натяжения троса:
где Y1 рассчитывается также, как записано ранее.
Угол β рассчитывается:

Рассмотрим математическую модель с параметрами, присущими реальному узлу переменного сопротивления: расстояние от блока до верхнего рычага C1=0,5 (м), расстояние от верхнего рычага до нижнего С2=0,71 (м), расстояние от телескопической стойки до оси вращения С3=0,045 (м).
С помощью такого узла можно реализовать режим возрастающего сопротивления. Для этого достаточно положить расстояние от оси вращения верхнего рычага до точки прикрепления троса X1=0,315 (м), от оси вращения до точки прикрепления пружины X2=0,315 (м), от проекции оси вращения на нижний рычаг до точки прикрепления нижнего конца пружины - Х3=0,515 (м).
Убывающий режим сопротивления реализуется следующим образом:
X1=0,315 (м), Х2=0,315 (м), Х3=0,115 (м).
Постоянный (квазипостоянный) режим сопротивления (на пятипроцентном уровне точности) реализуется с помощью двух групп пружин, расположенных в рассмотренных выше двух положениях. Первая группа пружин, создающая возрастающий режим сопротивления, обладает коэффициентом жесткости, в два раза большим, чем вторая. Для расчета нескольких групп пружин достаточно сложить значения силы для каждой из групп. Величину натяжения троса можно менять с помощью изменения расстояния С2, количества пружин, и если не нужно точно придерживаться режима сопротивления, то и изменением положения точек прикрепления пружин и троса.
Для создания убывающе-возрастающего режима сопротивления необходимо добавить еще один упругий элемент, который конструктивно представляет собой пружину, один конец которой соединен с верхним рычагом, а другой - с тросом, длина которого может регулироваться в зависимости от потребности во включении упругого элемента в нагрузку в нужной фазе движения.
Для расчета момента (Мпт), создаваемого этим элементом, нужно ввести координаты прикрепления верхнего (Х5) и нижнего (Х4) конца и начальную длину упругого элемента (Y30) и его собственно упругой части (Y3п) (фиг.3), тогда:

Работают с устройством следующим образом.
Инженер - исследователь или тренер - вставляет дискету или диск с программным обеспечением в соответствующее гнездо 23 или 24 системного блока 19 персонального компьютера 18 (фиг.1) и с помощью клавиатуры 21 и оптической мыши 22 инициирует ввод программного обеспечения в память компьютера. Это позволяет проверить следующие блоки и узлы: работоспособность силового датчика 16, с помощью которого измеряется, запоминается и регистрируется через АЦП 33 и системный блок 19 натяжение троса 15, и датчика перемещения 17 троса 15, а также подвижность блока 10 и блочков 25, 26, 27, 28, 29 и 30, работу узла настройки троса 31, узла регулировки под руку 32 спортсмена, АЦП 33, стабилизированного источника электропитания 34 и организацию двух полиспастов - первого при блочке 25 и второго - при блочке 30, и одновременно проверить правильность работы программного обеспечения. Затем тарируется силовой датчик 16 и датчик перемещения 17 троса 15 соответствующими измерительными средствами.
С помощью узла регулировки под руку 32 спортсмена и узла настройки троса 31 производится настройка устройства 1 под конкретного спортсмена, а с помощью держателя блочка 27 выбирается слабина троса 15, после чего тренер выбирает один из четырех режимов переменного сопротивления путем подбора системы пружин 14 и их закрепление на рычагах 4 и 6 в отверстиях 12 верхнего рычага 6 и отверстиях 13 в нижнем рычаге 4 (смотри настройку узла переменного сопротивления). После этого спортсмен приступает к двигательным действиям, выполняя их по 6-8 повторений в 8-10 подходах [2, с.46] с акцентом на максимальную начальную скорость. Результаты этих двигательных действий записываются и регистрируются в памяти системного блока 19 персонального компьютера 18 и по требованию вызываются на экран дисплея 20, а при необходимости - на принтер (на фиг.1 не показан).
Поменяв режим переменного сопротивления устройства, спортсмен повторяет двигательные действия в указанных выше повторах и подходах с акцентом на максимальную начальную скорость. И так во всех четырех режимах переменного сопротивления или выбранном тренером режиме.
Устройство позволяет также развивать соответствующие группы мышц при борьбе правой и левой руками.
В заявляемом устройстве несколько нестандартных узлов. Рассмотрим основные из них, уделив внимание их конструкции, принципу действия и участию в работе всего устройства.
Силовой датчик 16
Одна из возможных конструкций силового датчика 16, построенного, например, на основе динамометра, показана на фиг.4, а его электрическая принципиальная схема - на фиг.5. Силовой датчик 16 включает в себя основание 35, пружинный динамометр 36, потенциометр 37 с линейным перемещением его движка, сочлененного с показателем (стрелкой) пружинного динамометра 36, параметрический стабилизатор напряжения, состоящий из стабилитрона 38 и гасящего резистора 39, размещенных на электроизолированных втулках 40, 41, 42, и силовой датчик 16 работоспособен при наличии АЦП 33, системного блока 19 персонального компьютера 18, соответствующего программного обеспечения и источника стабилизированного электропитания 34.
Работает силовой датчик следующим образом.
Как работает пружинный динамометр 36, известно и очевидно из фиг.4. Только перед началом измерений инженер-исследователь тарирует силовой датчик 16 с помощью образцового динамометра и проверяет работоспособность АЦП 33 системного блока 19, программного обеспечения, управляющего работой данного узла, и источника стабилизированного электропитания 34. Убедившись в правильной работоспособности данного узла, смежных с ним узлов и программного обеспечения, инженер-исследователь переходит к проверке работоспособности других узлов.
Датчик перемещения 17 троса 15
Рассмотрим состав и принцип действия этого узла, оконтуренного штриховой линией на фиг.6. Узел содержит оптический датчик 43, в котором светоизлучающий элемент 44 и световоспринимающий элемент (светодиод) 45 расположены на одной линии относительно друг друга, обеспечивающий засвечивание светопринимающего элемента 45 только при нахождении отверстия 46 в колесике блочка 27 между ними. Это выполнено механически в виде оптического датчика 43, где соответствующим образом просверлены два канальца, в которых размещены указанные элементы. Эти элементы электрически связаны с усилителем-формирователем 47 и подключены через транзисторный ключ 48 к LPT-порту системного блока 19. При этом усилитель-формирователь 47 и транзисторный ключ 48 размещены на платке 49. Сам оптический датчик 43 размещен на щечках 50 и 51 блочка 27, а его колесико насажено на ось 52 через латунную втулку 53.
На фиг.7 показана одна из возможных электрических принципиальных схем данного узла 17. Светоизлучающий элемент 44 включен в прямом направлении. Ток через него задается резистором 54. Светопринимающий элемент (светодиод) 45 включен в обратном направлении, и ток через него в освещенном состоянии задается резистором 55. Изменение потенциала в темновом и световом состояниях точки соединения резистора 55 и светопринимающего элемента 45 воспринимается усилителем-формирователем 47 (оконтурен штрихпунктирной линией), коэффициент усиления усилительного элемента 56 которого корректируется резисторами 57 и 58, коллектор выходного ключевого транзистора 48 подключен к LPT-порту системного блока 19 персонального компьютера 18.
Работа датчика перемещения 17 осуществляется следующим образом. При вращении колесика 27 световые окна 46 (а их может быть более одного, лучше, если их будет 5 или 10) в нем периодически оказываются между световоспринимающим элементом 45 и светоизлучающим элементом 44, на что схема реагирует скачкообразным изменением сигнала на входе усилителя-формирователя 47 и состоянием транзистора 48 выходного транзисторного ключа, сопротивление последнего изменяется от максимального до практически нулевого. Этот сигнал передается через LPT-порт в системный блок 19 персонального компьютера 18. В программном обеспечении, управляющем работой этого узла, должно быть учтено, что за счет блочка 25 перемещение троса 15 должно быть уменьшено в два раза (см. фиг.1).
Из фиг.1 следует, что для нормальной работы датчика перемещения 17 и устройства 1 в целом необходимо, чтобы трос 15 был нормально натянут и в нем не должно быть слабины, иначе будет ошибка в работе. Этого можно достигнуть, используя стойку под датчиком перемещения 17 типа телескопической, но с плавным изменением ее длины. На фиг.8 (вид спереди) и фиг.9 (вид сбоку слева) представлено одно из возможных технических решений, выполняющее эту задачу.
Узел содержит основание 59, которое крепится к столу тремя винтами 60, 61, 62 с гайками, квадратный патрубок 63, цилиндрическую шпильку 64 с резьбой практически по всей ее длине, и штифтовой канавкой 65, и опорной пластиной 66, прикрепленной к верхней части шпильки 64. Данная шпилька перемещается посредством гайки 67, выбирающей слабину троса 15. Гайка 67 опирается на квадратный патрубок 63 с помощью ограничительных пластин 68 и 69, прикрепленных к квадратному патрубку 63, и запорной пластины 70, прикрепленной к ограничительным пластинам 68, 69 посредством двух винтов 71 и 72 с гайками. Штифт 73, размещенный в запорной пластине 70, препятствует проворачиванию шпильки 64. Откосина 74 способствует устойчивому положению данного узла.
Работают с данным узлом следующим образом.
Гайкой 67 создают некоторую слабину троса 15. Узлом регулировки под руку 32 спортсмена подстраивают трос 15 под конкретного человека, а узлом настройки троса 31 настраивают положение троса 15 на уровень его положения в узле регулировки под руку 32 спортсмена. Устанавливают режим переменного сопротивления с помощью системы пружин 14. Затем гайкой 67 добиваются нормального натяжения троса 15.
Узел регулировки под руку 32 спортсмена
Данный узел является фактически исполнительным в устройстве (см. фиг.1). Одна из возможных конструкций этого узла показана на фиг.10 - вид спереди, фиг.11 - вид сверху и фиг.12 - вид сбоку слева. Узел 32 содержит основание 75, которое крепится к столу 3 (см. фиг.1) четырьмя шурупами или винтами с гайками 76, 77, 78, 79 (фиг.11), ось 80, закрепленную на основании 75 двумя колодочками 81, 82, в которых имеются подшипники скольжения, например латунные или бронзовые, 83, 84 (подшипник 84 не показан, он находится в колодочке 82). Колодочки 81 и 82 прикреплены к основанию 75 четырьмя винтами с гайками 85, 86, 87, 88. К оси 80 прикреплен (например, сваркой) квадратный патрубок 89, образующий с квадратным патрубком 90 большего размера телескопическую стойку с фиксированным удлинением с помощью штыря 91, одного отверстия 92 в большем патрубке 90 и нескольких отверстий 93 в малом патрубке. К большому патрубку 90 прикреплена, например сваркой, планка 94, к которой посредством двух винтов 95 и 96 (на фиг.10 показан один винт 95) прикреплены щечки блочка 30 (см. фиг.1), на которых размещено колесико 97 блочка, посаженное через подшипник 98 скольжения, и винт с гайкой 99, являющийся осью блочка 30. На патрубке большего размера 90 закреплена рукоятка 100, зафиксированная двумя винтами 101 и 102. Колесико 97 огибается тросом 15.
Работают с данным узлом следующим образом.
Штырь 91 извлекают из патрубков 89 и 90. Передвигая патрубок 90, добиваются удобного положения руки спортсмена и штырем 91 фиксируют это положение узла регулировки под руку 32 спортсмена.
Узел настройки троса 31
Этот узел является опорным, относительно него совершается перемещение узла регулировки под руку 32 спортсмена (см. фиг.1). Одна из возможных конструкций данного узла показана на фиг.13÷фиг.15, где на фиг. 13 представлен вид спереди, на фиг.14 - вид сверху и на фиг.15 - вид сбоку слева. Узел настройки троса 31 содержит основание 103, которое крепится к столу 3 (см. фиг.1) четырьмя шурупами или винтами с гайками 104, 105, 106 и 107. К основанию 103 прикреплен, например сваркой, цилиндрический патрубок 108 большего диаметра, образующий с цилиндрическим патрубком 109 телескопическую стойку с плавным регулированием ее длины при помощи гайки 110 с внутренней резьбой, резьбы на патрубке 109, опорных пластин 111 и 112, запорной пластины 113 и двух винтов с гайками 114 и 115. Чтобы не было прокручивания патрубка 109 меньшего диаметра, в нем сделана штифтовая канавка 116, а в запорной пластине 113 размещен штифт 117. К верхнему концу патрубка 109 меньшего диаметра прикрепляется держатель 118 блочков 28 и 29 (см. фиг.1). Каждый из этих блочков состоит (см. фиг.13) из щечек 119 и 120, колесика 121 и 122, подшипника 123 и 124 и стягивающих винтов с гайками 125 и 126, являющихся осями блочков. Каждый блочок крепится к держателю 118 с помощью винтов 127, 128, 129 и 130. Трос 15 проходит между колесиками 121 блочка 28 и 122 блочка 29 (см. фиг.1), огибает колесико 97 (см. фиг.10) и возвращается к узлу настройки троса 31, где фиксируется в фиксаторе 131, размещенном на держателе 118 (см. фиг.14 и 15).
Работают с узлом настройки троса 31 следующим образом.
После регулировки троса 15 под руку спортсмена перемещают держатель блочков 118 таким образом, чтобы трос 15 в держателе 118 находился напротив положения троса 15 в узле регулировки под руку 32 спортсмена. После этого выбирают слабину троса 15 с помощью телескопической стойки под датчиком перемещения 17 и начинают тренировку или исследование.
Программное обеспечение
С его помощью осуществляется выполнение физических упражнений. При этом программное обеспечение должно состоять из комплекса программ. В комплекс программ, например автоматической обработки информации с периферийных силового датчика 16 и датчика перемещения 17, входят следующие программы: автоматический ввод и регистрация данных, предварительная обработка сигналов (сглаживание), тарировки входных сигналов, вывод графического изображения входных сигналов, математическая обработка характеристик выполняемых физических упражнений.
Программа математической обработки характеристик выполняемого физического упражнения позволяет выполнять расчет следующих биомеханических параметров: длительность всего движения и отдельных его фаз и периодов, величины перемещения, скорости и ускорения движения, выполненная работа во время одного движения и серии (нескольких) движений.
По сравнению с прототипом предлагаемое устройство позволяет повысить качество обучения начинающих спортсменов-армрестлеров благодаря освоению ими правильного движения руки и туловища в самом начале тренировочного процесса при минимальных затратах энергетических ресурсов и в условиях различных режимов переменного сопротивления.
Источники информации
1. Hobby J.M. Pat. №3947025 (USA). Arm wrestling. - Publ. 30.03.76.
2. Математическая модель узла переменного сопротивления машины безынерционного управляющего воздействия / В.Г.Свечкарев, С.В.Поляков, М.М.Эбзеев, Э.Э.Кочкаров // Теория и практика физической культуры. - 2007. - №3. - С.78-79.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И ТРЕНИРОВКИ СПОРТСМЕНОВ-АРМРЕСТЛЕРОВ | 2009 |
|
RU2413557C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ШТАНГИ И БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ТЯЖЕЛОАТЛЕТА | 2008 |
|
RU2403937C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2010 |
|
RU2479254C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2010 |
|
RU2411978C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ НОГ | 2009 |
|
RU2408404C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2008 |
|
RU2378030C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2006 |
|
RU2319217C1 |
| Устройство для тренировки мышц конькобежцев | 2016 |
|
RU2634243C2 |
Устройство для тренировки спортсменов-армрестлеров содержит телескопическую стойку, зафиксированную на столе, к которой прикреплены два рычага: нижний, расположенный перпендикулярно стойке и посаженный на втулку с фиксатором с возможностью перемещения вверх или вниз по стойке и фиксации, а верхний рычаг посажен на ось с возможностью подъема, переходя из горизонтального положения, задаваемого передвижным фиксатором, в вертикальное, и на верхнем торце телескопической стойки закреплен блок, установленный с возможностью подъема или спуска, фиксируя телескопическую стойку на разной высоте, рычаги снабжены отверстиями для зацепления пружин и троса, перекинутого через упомянутый блок, рукоятку, за которую спортсмен тянет трос на тренировке. Он имеет силовой датчик, который установлен в разрыв троса для измерения и фиксирования натяжения троса, датчик перемещения троса, персональный компьютер, шесть дополнительных блочков, узел настройки троса, узел регулирования под руку спортсмена, элемент выборки слабины троса, один аналого-цифровой преобразователь и стабилизированный источник электропитания. Один конец троса закреплен через силовой датчик на верхнем торце телескопической стойки, а сам трос огибает дополнительный первый блочок, щечки которого зацеплены в отверстии верхнего рычага, огибает упомянутый блок, огибает дополнительный шестой блочок, закрепленный в узле регулировки под руку спортсмена, а вторым концом трос закреплен на узле настройки троса, датчик перемещения троса расположен на щечках третьего дополнительного блочка с отверстиями, расположенного на стойке выборки слабины троса, и соединен электрическим выходом с LPT-портом системного блока. Силовой датчик через аналого-цифровой преобразователь подключен электрически к внутренней шине системного блока и запитан, как и датчик перемещения троса, от стабилизированного источника питания. Использование данного изобретения позволяет обеспечить повышение эффективности тренировки. 5 з.п. ф-лы, 15 ил.
1. Устройство для тренировки спортсменов-армрестлеров, содержащее телескопическую стойку, зафиксированную на столе армрестлинга, к которой прикреплены два рычага: нижний, расположенный перпендикулярно стойке и посаженный на втулку с фиксатором с возможностью перемещения вверх или вниз по стойке и фиксации, а верхний рычаг посажен на ось с возможностью подъема, переходя из горизонтального положения, задаваемого передвижным фиксатором, в вертикальное, и на верхнем торце телескопической стойки закреплен блок, установленный с возможностью подъема или спуска, фиксируя телескопическую стойку на разной высоте, рычаги снабжены отверстиями для зацепления пружин и троса, перекинутого через упомянутый блок, рукоятку, за которую спортсмен тянет трос на тренировке, отличающееся тем, что он имеет силовой датчик, установленный в разрыв троса для измерения и фиксирования натяжения троса, датчик перемещения троса, персональный компьютер, программное обеспечение которого обеспечивает работу датчиков, выполнение математических расчетов и устройства в целом, шесть дополнительных блочков, узел настройки троса, узел регулирования под руку спортсмена, элемент выборки слабины троса, один аналого-цифровой преобразователь и стабилизированный источник электропитания, причем в устройстве один конец троса закреплен через силовой датчик на верхнем торце телескопической стойки, а сам трос огибает дополнительный первый блочок, щечки которого зацеплены в отверстии верхнего рычага, огибает упомянутый блок, огибает дополнительный шестой блочок, закрепленный в узле регулировки под руку спортсмена, а вторым концом трос закреплен на узле настройки троса, датчик перемещения троса расположен на щечках третьего дополнительного блочка с отверстиями, расположенного на стойке выборки слабины троса, и соединен электрическим выходом с LPT-портом системного блока, а силовой датчик через аналого-цифровой преобразователь подключен электрически к внутренней шине системного блока и запитан, как и датчик перемещения троса, от стабилизированного источника питания.
2. Устройство по п.1, отличающееся тем, что силовой датчик содержит основание, пружинный динамометр, потенциометр с линейным перемещением его движка, сочлененный со стрелкой пружинного динамометра и запитанный от параметрического стабилизатора напряжения, состоящего из стабилитрона и гасящего сопротивления, и информационный выход потенциометра через аналого-цифровой преобразователь соединен с системным блоком персонального компьютера.
3. Устройство по п.1, отличающееся тем, что датчик перемещения содержит оптический датчик, состоящий из светоизлучающего элемента и световоспринимаемого элемента, расположенные на одной линии относительно друг друга обеспечивающие засвечивание световоспринимающего элемента только при нахождении отверстия в колесике блочка между ними, и эти элементы связаны электрически с усилителем-формирователем и через транзисторный ключ - с LPT портом системного блока персонального компьютера.
4. Устройство по п.1, отличающееся тем, что телескопическая стойка под датчиком перемещения содержит основание, которое крепится к столу шурупами или винтами с гайками, квадратный патрубок, образующий телескопическую стойку с цилиндрической шпилькой, имеющей резьбу практически по всей ее длине, штифтовую канавку, опорную пластину, прикрепленную к верхней части шпильки, гайку, выбирающую слабину троса, опирающуюся на квадратный патрубок и ограничительные пластины, к которым крепится запорная пластина, в которой размещен штифт, препятствующий прокручиванию шпильки.
5. Устройство по п.1, отличающееся тем, что узел регулировки под руку спортсмена содержит основание, которое крепится к столу шурупами или винтами с гайками, ось, прикрепленную к основанию двумя колодочками, в которых применены подшипники скольжения в каждой колодочке, и прикреплены эти колодочки к основанию двумя винтами с гайками каждая, и к оси прикреплен квадратный патрубок меньшего размера поперечного сечения, образующий с квадратным патрубком большего размера поперечного сечения телескопическую стойку с изменением и фиксацией ее длины с помощью штыря, отверстия в патрубке большего размера поперечного сечения и несколько отверстий в патрубке меньшего размера поперечного сечения, и к патрубку большего размера поперечного сечения прикреплена планка, к которой посредством винтов прикреплены щечки блочка, на которых размещено колесико блочка, посаженное через подшипник скольжения и винт с гайкой, являющейся осью данного блочка, и на патрубке большего размера поперечного сечения закреплена рукоятка, и трос огибает данный блочок.
6. Устройство по п.1, отличающееся тем, что узел настройки троса содержит основание, которое крепится к столу шурупами или винтами с гайками и к основанию прикреплен цилиндрический патрубок большего диаметра, образующий с цилиндрическим патрубком меньшего диаметра телескопическую стойку с плавным регулированием длины этой стойки, осуществляемой с помощью гайки, резьбы на патрубке меньшего диаметра, опорных пластин, запорной пластины и винтов с гайками, соединяющими запорную и опорные пластины, при этом для исключения прокручивания патрубка меньшего диаметра в нем сделана штифтовая канавка, а в запорной пластине размещен штифт, и к верхнему концу этого патрубка прикреплен держатель двух блочков, каждый из которых состоит из щечек, колесика, подшипника и стягивающего винта с гайкой, являющегося осью блочка, и крепится к держателю с помощью винтов, и трос между указанными колесиками огибает блочок узла регулировки под руку спортсмена и возвращается к узлу настройки троса, где он фиксируется в фиксаторе, размещенном на держателе.
| РУКА МЕХАНИЧЕСКАЯ ДЛЯ АРМРЕСТЛИНГА | 1997 |
|
RU2128539C1 |
| JP 2002035431 A, 02.05.2002 | |||
| JP 7250917 A, 10.03.1995 | |||
| US 4900019 A, 13.02.1990 | |||
| US 5431616 А, 11.07.1995 | |||
| СПОСОБ ДИСТАНЦИОННОГО ПРОВЕДЕНИЯ ПРОТИВОБОРСТВА РУК СОПЕРНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2149666C1 |

