Область техники
Настоящее изобретение имеет отношение к модульной системе авионики (авиационной электроники) самолета.
Предпосылки к созданию изобретения
Архитектура авионики, которую в настоящее время используют на самолетах, основана на технических требованиях в соответствии с Arinc 700. В соответствии с этими техническими требованиями изготовители устройств авионики предоставляют специально сделанный на заказ контроллер, который введен в типовой элемент замены (LRU) для каждой функции. Каждый LRU содержит следующие компоненты: источник питания, процессор, модули ввода-вывода, а также другие компоненты.
За счет использования интегрированной модульной авионики становится возможной более совершенная интеграция в результате использования вычислительных возможностей микропроцессоров для решения различных задач (коллективное использование ресурсов). Дополнительными преимуществами являются уменьшение числа компонентов и стандартизация компонентов.
В известной IMA архитектуре (архитектуре интегрированной модульной авионики) предусмотрено несколько шкафов, расположенных в разных местах в самолете. Для обмена данными все модули соединены с использованием монтажной шины (Arinc 659, в настоящее время SAFEbus фирмы Honeywell).
Данные датчиков различных функций поступают в основной процессор через модули ввода и монтажную шину. В основном процессоре операционная система определяет, какое системное программное обеспечение (какое приложение) следует использовать, и в какое время. Данные непосредственно передают в объединенные программные средства. После завершения обработки данные возвращают по монтажной шине на выходной модуль, откуда их передают на исполнительные механизмы или на другие системы.
Шкафы, в свою очередь, объединены в сеть (Arinc 629).
При таком решении монтажная шина образует узкое место системы, чтобы избежать коллапса, данные для передачи необходимо определять детерминистически.
Уже предприняты различные попытки решения этих проблем. Например, в патенте США 5,506,963 предложена процессорная система, работающая в реальном времени, в которой используют сопроцессор, который управляет интервалами времени специфического временного кадра, выделенного для процессора. Эти интервалы времени могут иметь различную длительность, причем назначение одной или нескольких схем разбивки (раскладки) определяется функцией/ приложением. В этом решении используют центральную шину данных с детерминистическим потоком данных. При этом необходимо использовать инструменты для задания потока данных, однако могут возникать конфликты данных, причем изменения функции возможны только во время выбора структуры шины данных.
В соответствии с патентом США 4,658,359 используют один компьютер для управления множеством компьютеров в сложной системе авионики. В результате один пользователь может производить обработку множества функций/ приложений на одном дисплее. Здесь приоритетными являются работа и изменение приложений системы связи при помоши исполнительного компьютера. Использование интегрированной модульной системы авионики с транспьютерами не рассматривается.
В соответствии с патентом США US 5,361,367 несколько процессоров с одним потоком команд и многими потоками данных (SIMD процессоров) предусмотрены в компьютере. Двумя наборами из соответствующих трех индивидуальных процессоров управляют при помощи главного компьютера, причем эти наборы соединены в множество регистров. Эти STMD процессоры связаны, для обмена данными, с образованием кольцевого размещения (кольца) или размещения в виде трубы. В результате получают процессор с высокой скоростью. Однако остаются проблемы, связанные с шиной данных при высоких скоростях передачи данных и в случае распределенных задач.
В соответствии с патентом ЕР 0,570,729 А2, в индивидуальных кристаллах выполнены восемь процессоров, которые соединены при помощи кубической топологии. По сравнению с известными микропроцессорами уменьшается количество штыревых контактов и сокращается время хранения в памяти. И в этом случае, предложенное решение повышает скорость процессорного кристалла (микросхемы).
Сущность изобретения:
В соответствии с изложенным, задачей настоящего изобретения является создание модульной системы авионики, в которой, за счет внедрения детерминистического потока данных, не используют центральную шину данных, так что не могут происходить конфликты данных в шинах данных.
В соответствии с настоящим изобретением предлагается система, которая содержит параллельные процессоры, например, транспьютеры; шкафы, которые содержат по меньшей мере два основных процессорных модуля (СРМ1, СРМ2) и по меньшей мере два модуля ввода-вывода (IOM1, IOM2); причем модули ввода-вывода (IOM1,IOM2) служат интерфейсами для подлежащих управлению систем, и служат для управления и промежуточного хранения данных, поступающих в шкаф или выдаваемых из него; каждый основной процессорный модуль (СРМ1, СРМ2) имеет независимую связь с каждым IOМ модулем и СРМ модулем; и в каждом основном процессоре несколько независимых системных программ работают под управлением операционной системы.
За счет использования параллельных процессоров, например, транспьютеров, исключается узкое место, созданное монтажной шиной, так как эти параллельные процессоры имеют связь с другими процессорами при помощи отдельных прямых линий передачи данных.
Указанные ранее и другие характеристики изобретения будут более ясны из последующего детального описания, приведенного со ссылкой на сопроводительные чертежи.
Краткое описание чертежей.
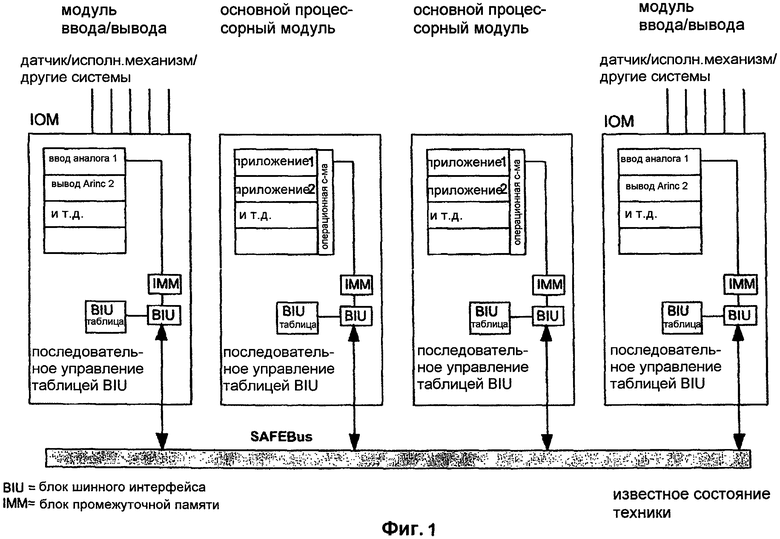
На фиг.1 схематично показана конфигурация IMА шкафа в соответствии с известным уровнем техники.
На фиг.2 показана конфигурация в соответствии с настоящим изобретением.
Подробное описание изобретения
В известной IMА архитектуре (архитектуре интегрированной модульной авионики), показанной на фиг.1, предусмотрено несколько шкафов, расположенных в разных местах в самолете. Каждый шкаф содержит следующие модули: модули электропитания (PSM), модули ввода-вывода (IOМ) и основные процессорные модули (СРМ). Все модули получают питание от источника электропитания и объединены для обмена данными при помощи монтажной шины (Arinc 659 - SAFEbus, фирма Honeywell).
Данные от датчиков различных функций передаются в основной процессор при помощи модулей ввода и монтажной шины. В основном процессоре операционная система определяет, какое системное программное обеспечение (какое приложение) следует использовать, и в какое время. Данные непосредственно передают в объеденные программные средства. После завершения обработки данные возвращают по монтажной шине на выходной модуль, откуда их передают на исполнительные механизмы или на другие системы. В свою очередь шкафы объединены в сеть (Arinc 629).
При таком решении монтажная шина образует узкое место системы. Чтобы избежать коллапса, данные для передачи необходимо определять детерминистически.
Для того чтобы исключить необходимость использования такой монтажной шины и, таким образом, исключить узкое место системы, предлагается архитектура для шкафа, которая основана на параллельных процессорах, например на транспьютерах. IMA архитектура, показанная на фиг.2, соответствует этой конфигурации.
По соображениям резервирования шкаф содержит по меньшей мере два основных процессорных модуля (СРМ1, СРМ2) и по меньшей мере два модуля ввода-вывода (IОM1, IOM2).
Модули IOМ используют в качестве устройства сопряжения (интерфейса) с датчиками, исполнительными механизмами, системами и шинами. Эти модули служат для управления и промежуточного хранения данных, поступающих в шкаф и выдаваемых из него.
Каждый основной процессор имеет независимую связь с каждым ЮМ модулем и СРМ модулем. В СРМ несколько независимых системных программ работают под управлением операционной системы.
Эта архитектура, которая основана на транспьютерах, обеспечивает следующие преимущества по сравнению с известным уровнем техники:
1. Отсутствуют центральная шина данных и двунаправленные шины данных и использованы только однонаправленные шины данных, так что не могут происходить конфликты данных в шинах.
2. Не требуются инструменты для проектирования детерминистического потока данных.
3. Возможно изменение приложений без необходимости изменения структуры шины данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАТФОРМА ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ БОЕВЫХ КОМПЛЕКСОВ | 2014 |
|
RU2595507C2 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| Блок вычислительный | 2019 |
|
RU2707701C1 |
| СЕТЬ РАСПРЕДЕЛЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ НА ВОЗДУШНОМ СУДНЕ | 2011 |
|
RU2572565C2 |
| МНОГОПРОЦЕССОРНЫЙ КОНТРОЛЛЕР ДЛЯ УПРАВЛЕНИЯ СЛОЖНЫМ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ | 2003 |
|
RU2263952C2 |
| ПЛАТФОРМА ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2009 |
|
RU2413280C1 |
| ОБЩЕСТВЕННЫЙ КОМПЬЮТЕР | 2014 |
|
RU2571575C1 |
| СИСТЕМА СВЯЗИ ЛЕТАТЕЛЬНОГО АППАРАТА, СОДЕРЖАЩАЯ ТЕРМИНАЛ ЛЕТАТЕЛЬНОГО АППАРАТА, И ПЕРЕНОСНОЙ РЕСУРС | 2008 |
|
RU2472112C2 |
| СИСТЕМА ИНДИКАЦИИ ДЛЯ ПРИЛОЖЕНИЙ АВИОНИКИ И НЕ АВИОНИКИ | 2008 |
|
RU2467289C2 |
Изобретение относится к области архитектуры авионики. Модульная система авионики самолета содержит параллельные процессоры, несколько шкафов, расположенных в разных местах в самолете и объединенных в сеть. Шкафы содержат два основных процессорных модуля (СРМ1, СРМ2) и два модуля ввода-вывода (IOM1, IOM2). Модули ввода-вывода (IOM1, IOM2) служат интерфейсами для подлежащих управлению систем, для управления и промежуточного хранения данных, поступающих в шкаф или выдаваемых из него. Каждый основной процессорный модуль (СРМ1, СРМ2) имеет независимую связь с каждым IOM модулем и СРМ модулем и в каждом основном процессоре несколько независимых системных программ работают под управлением операционной системы. Система позволяет исключить монтажную шину, которая требуется в известных системах. Достигается повышение эффективности работы модульной системы и облегчается внесение изменений в приложения. 1 з.п. ф-лы, 2 ил.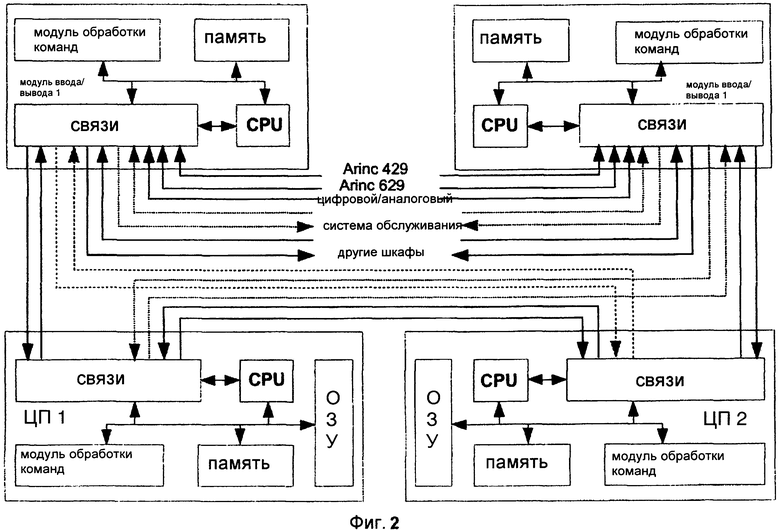
1. Модульная система авионики самолета, которая содержит несколько шкафов, расположенных в разных местах в самолете и объединенных в сеть, причем указанные шкафы используют для контроля или обработки сигналов, поступающих от датчиков и/или от исполнительных механизмов и других систем самолета, или передаваемых на них, причем система содержит параллельные процессоры, шкафы содержат по меньшей мере два основных процессорных модуля (СРМ1, СРМ2) и по меньшей мере два модуля ввода-вывода (IOM1, IOM2), причем модули ввода-вывода (IOM1, IOM2) служат интерфейсами для подлежащих управлению систем, и служат для управления и промежуточного хранения данных, поступающих в шкаф или выдаваемых из него, отличающая тем, что каждый основной процессорный модуль (СРМ1, СРМ2) имеет независимую связь, при помощи однонаправленных отдельных прямых линий передачи данных, с каждым IOМ модулем и СРМ модулем и в каждом основном процессоре несколько независимых системных программ работают под управлением операционной системы.
2. Модульная система авионики по п.1, отличающаяся тем, что конфигурация системы реализована при помощи транспьютеров.
| Yann-Hang Lee: "An integrated scheduling mechanism for fault-tolerant modular avionics systems", Aerospace conference, 1998 IEEE Snowmass at Aspen, USA 21-28 march 1998 | |||
| "Real-time Kernel exploits transputer for multiprocessor embedded systems", Computer disign, Pennwell publ | |||
| Littleton, Massachusetts, US, 01 august 1990 | |||
| Urban G: "A survivable |

